
Mise à jour le 20/10/2019 :Dans cet article ,nous allons traiter du principe du fonctionnement du module circulaire MR4131
Archives par étiquette : arduino uno
–
Mise à jour le 07/07/2018 : L’objectif de ce programme, très simple, est d’allumer ou éteindre une LED chaque fois qu’un bouton est pressé sur la tablette Nextion.
 Arduino Uno Rev3
Arduino Uno Rev3
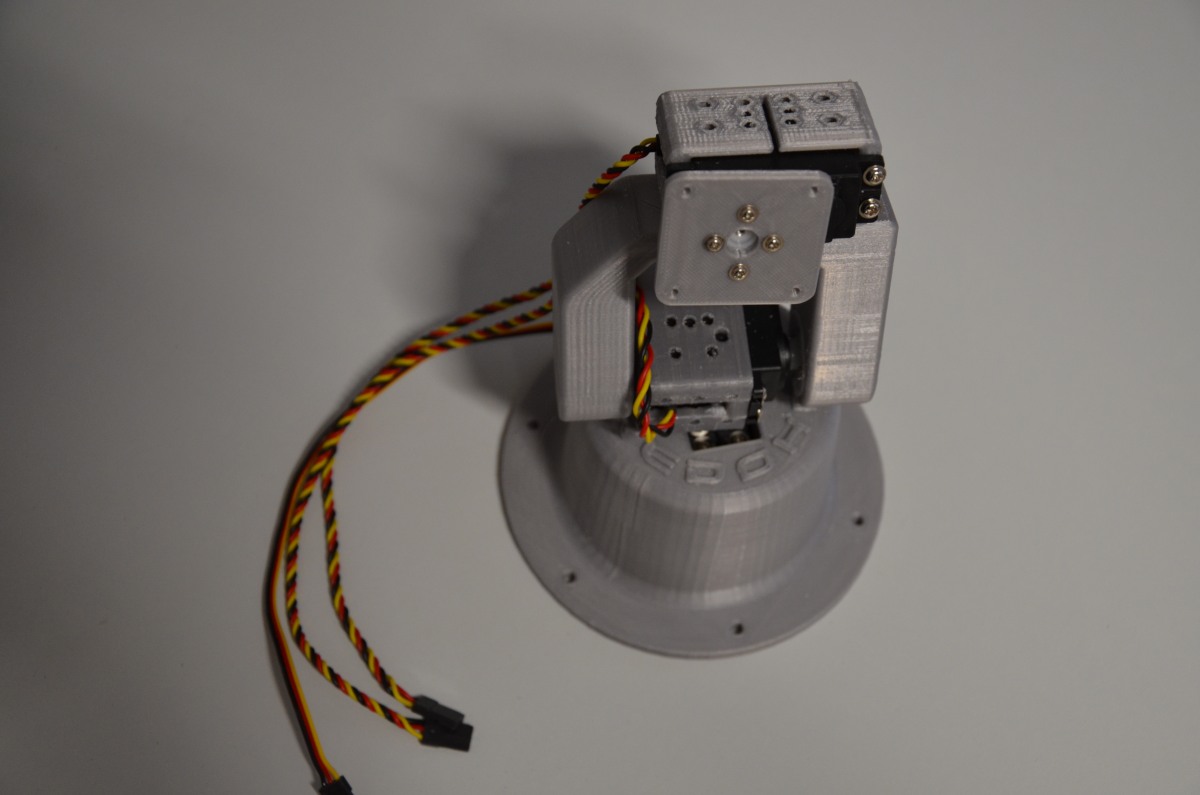
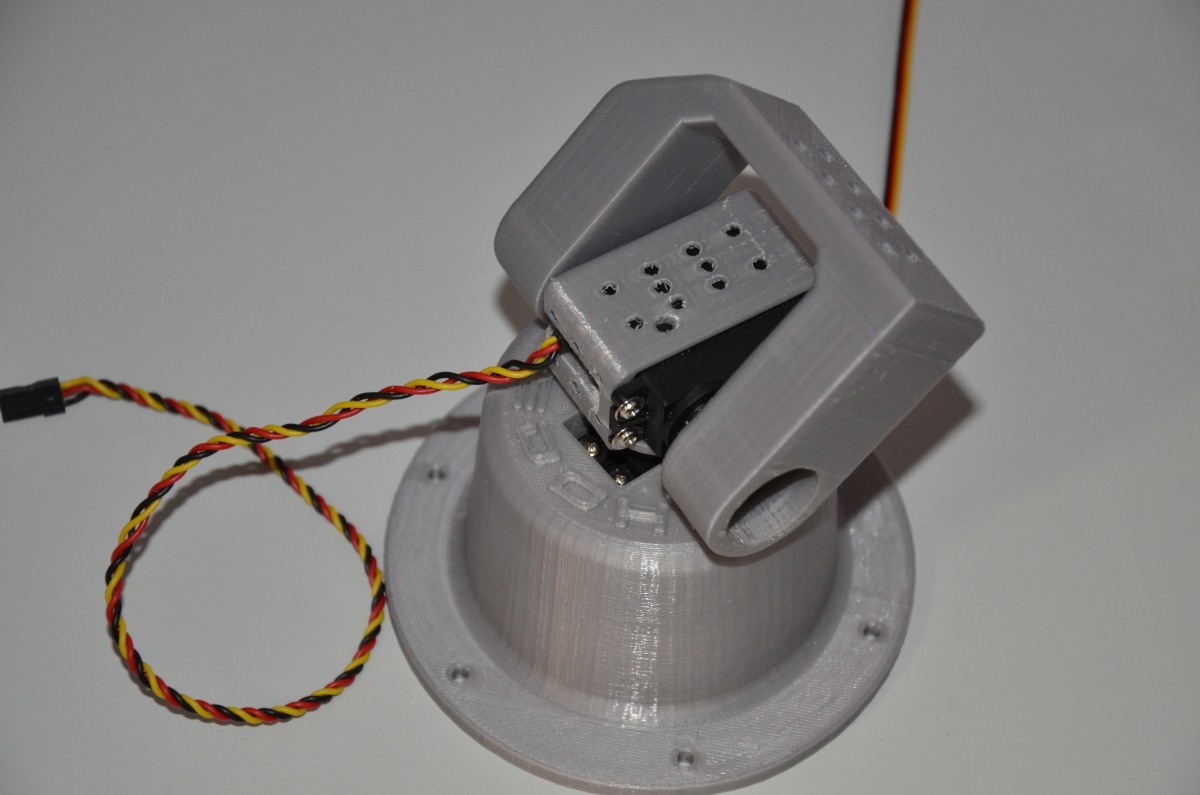
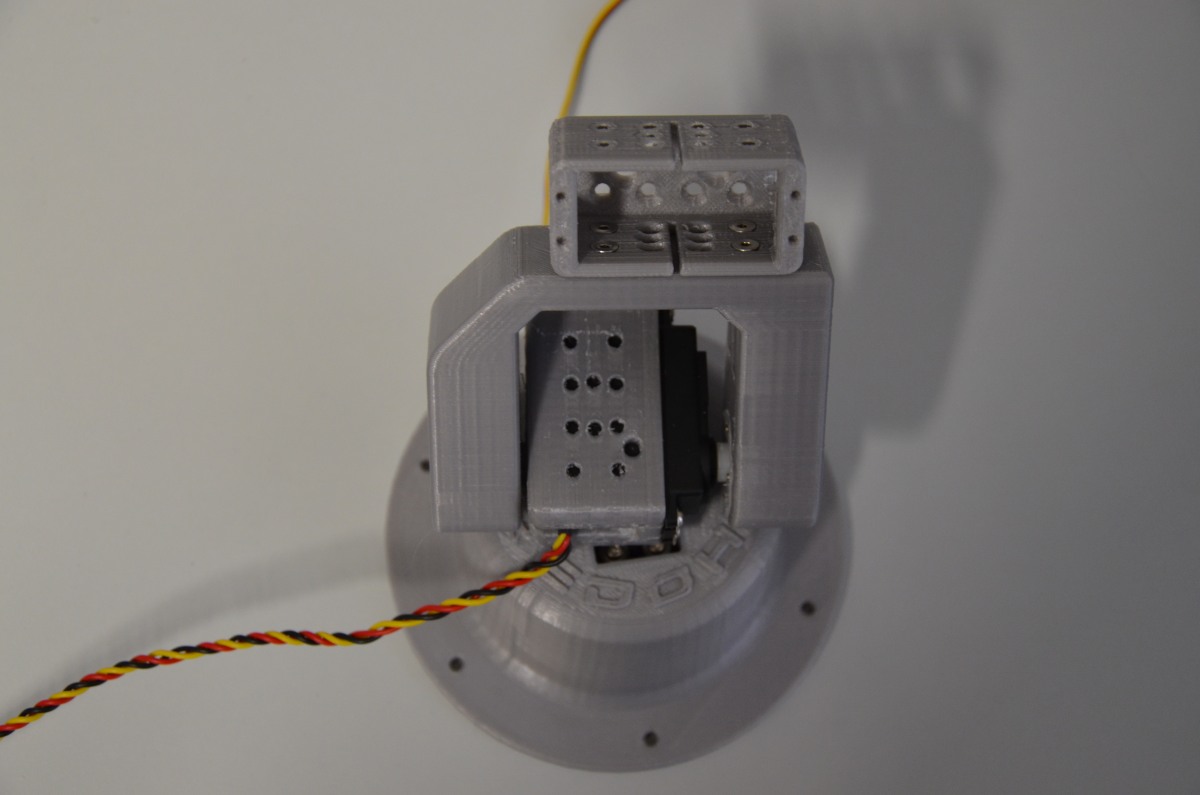
Mise à jour le 20/09/2019 : C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
Sommaire :
- Présentation du projet .
- Tutoriel de montage en photo .
- Montage du servomoteur dans la base .
- Montage du Palonnier type roue sur la cage .
- Assemblage de la cage sur le servomoteur de la base .
- Montage du servo porte bras .
- Assemblage du bras .
- Assemblage de la partie haute.
- Ensemble des fichiers pour l’impression 3D.
- Base du support 3 axes.
- Cage support pour servomoteur partie bas .
- Bras du support 3 axes
- Cage pour servomoteur partie haute
- Support supérieure
- Programme pour tester les limites mini et maxi du support 3 axes
- Schéma de branchement de l’ensembles des actionneurs et potentiomètre .
- Montage avec une carte Arduino Mega 2560.
- Liste du matériel câblage classique .
- Liste du matériel avec utilisation du matériel Grove
- Schéma électrique de principe
- Exemple de programme sur Arduino Mega
- Montage avec une carte Arduino Uno ( en cours )
- Montage avec une carte Arduino Mega 2560.
- Retour au menu nos robots
![]()
Présentation du projet . |
.
Vue
C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
.
![]()
Tutoriel de montage en photo .
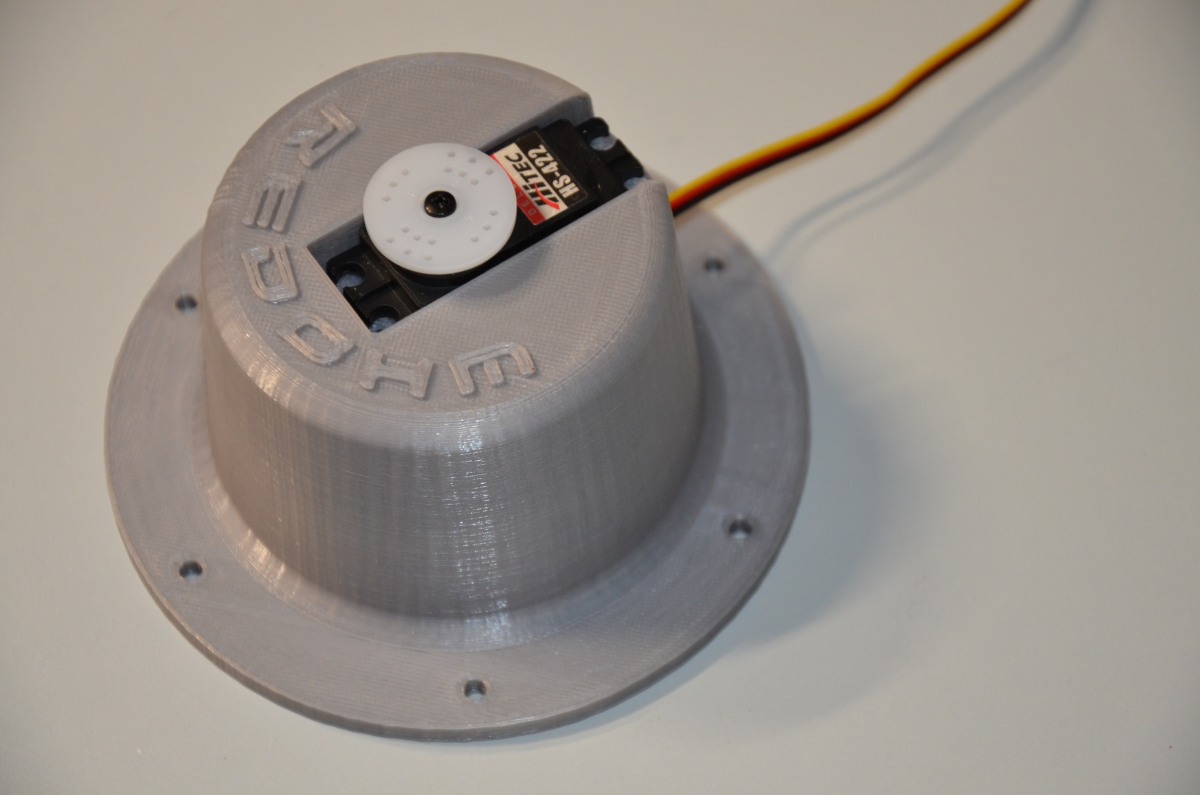
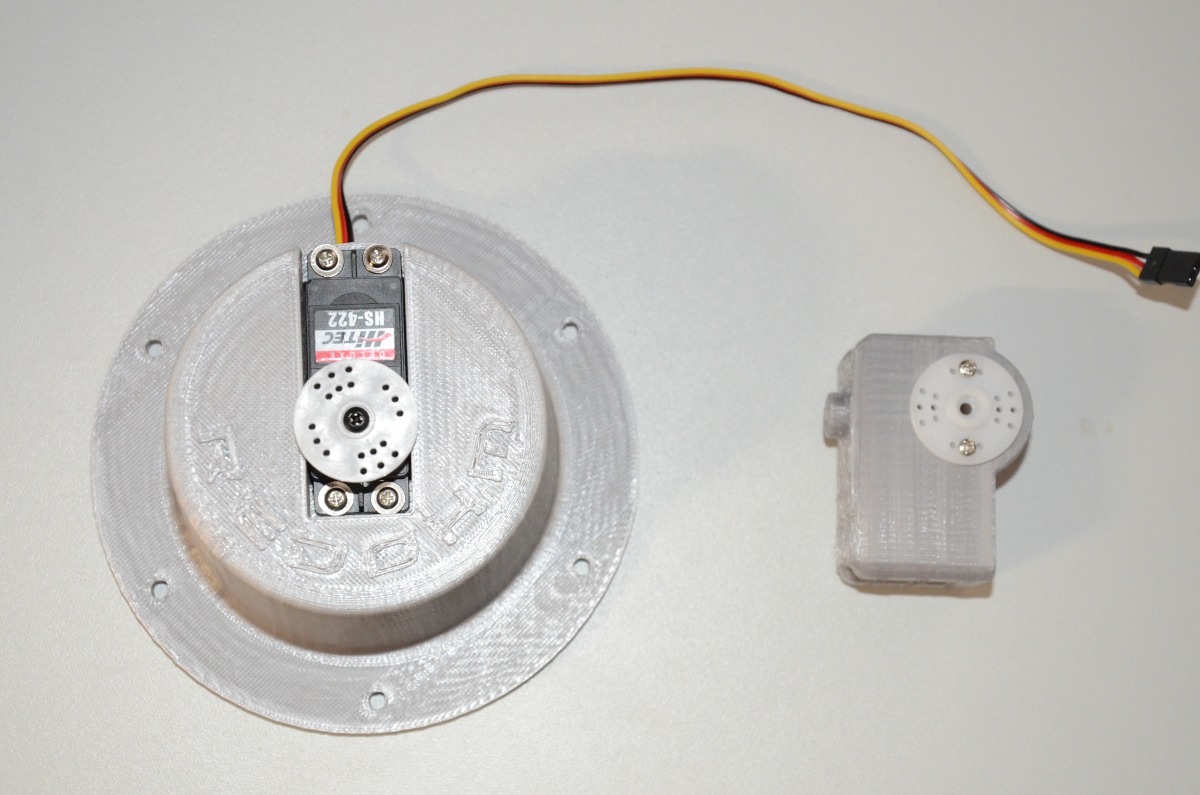
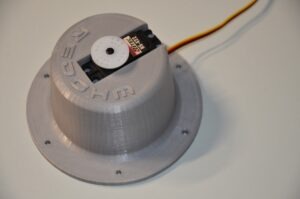
1: Montage du servomoteur HS-422 dans sa base .
Nous pouvons aussi utiliser le servomoteur Hitec HS-645 MG en sachant que les 2 servo ne possèdent pas le même couple . Nous avons un couple de 4.7kg.cm pour le HS-422 et de 9.6kg.cm pour le HS-645 MG .
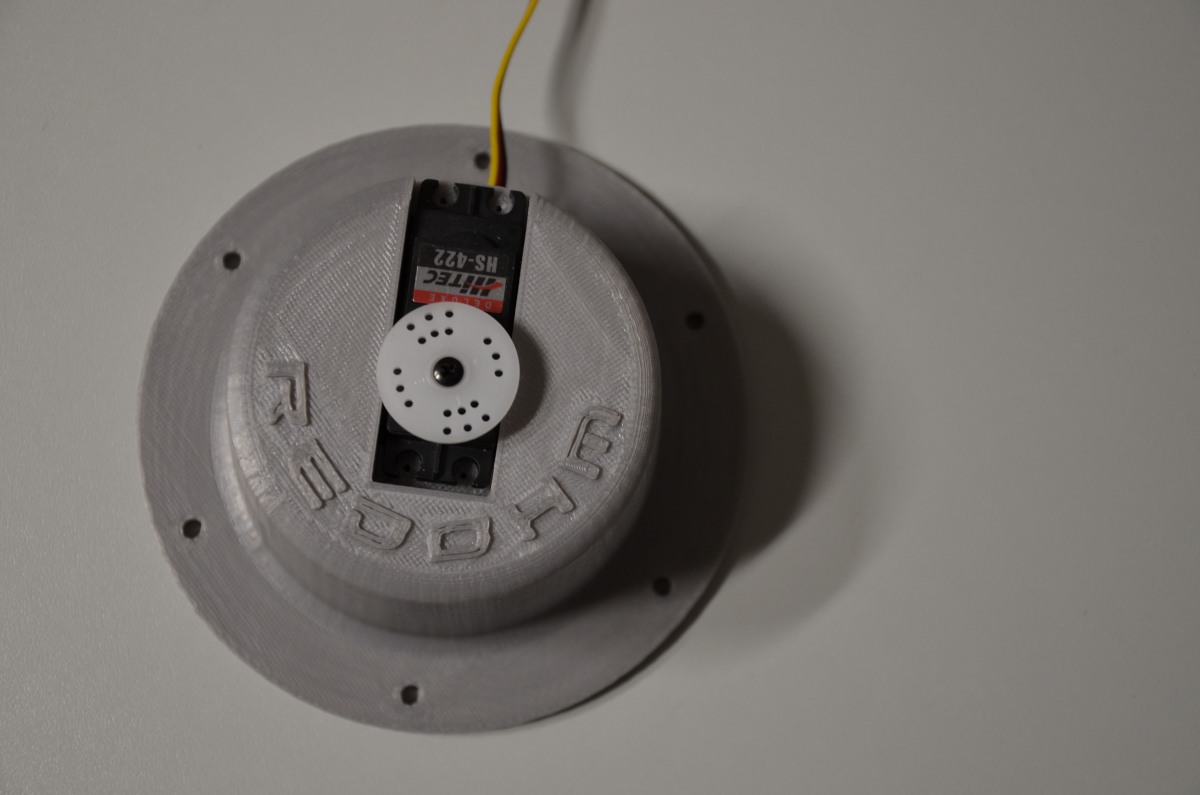
Montage du servomoteur HS-422 dans sa base
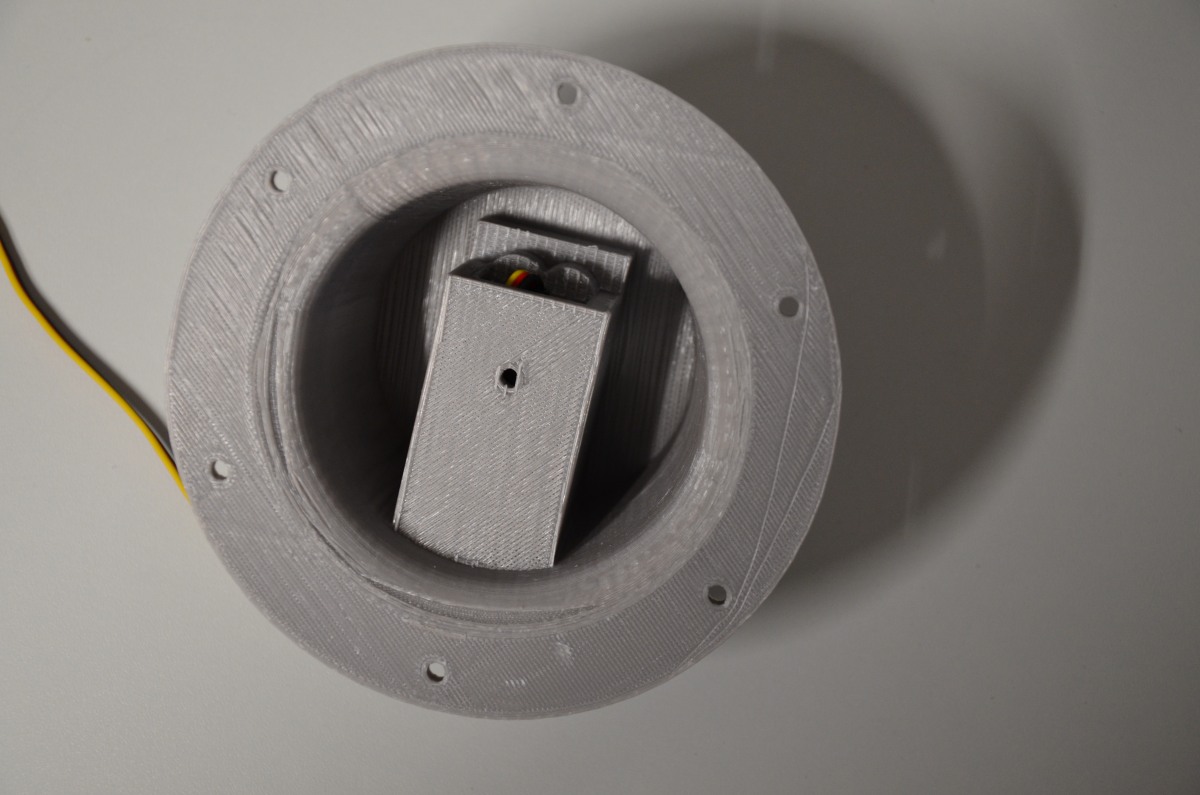
Montage du servomoteur HS-422 dans sa base (fig 2)
Montage du servomoteur HS-422 dans sa base (fig 3)
| Retour au sommaire |
2:Montage du Palonnier type roue sur la cage support du servomoteur ( en général ce type de palonnier est vendu avec son servo ) .
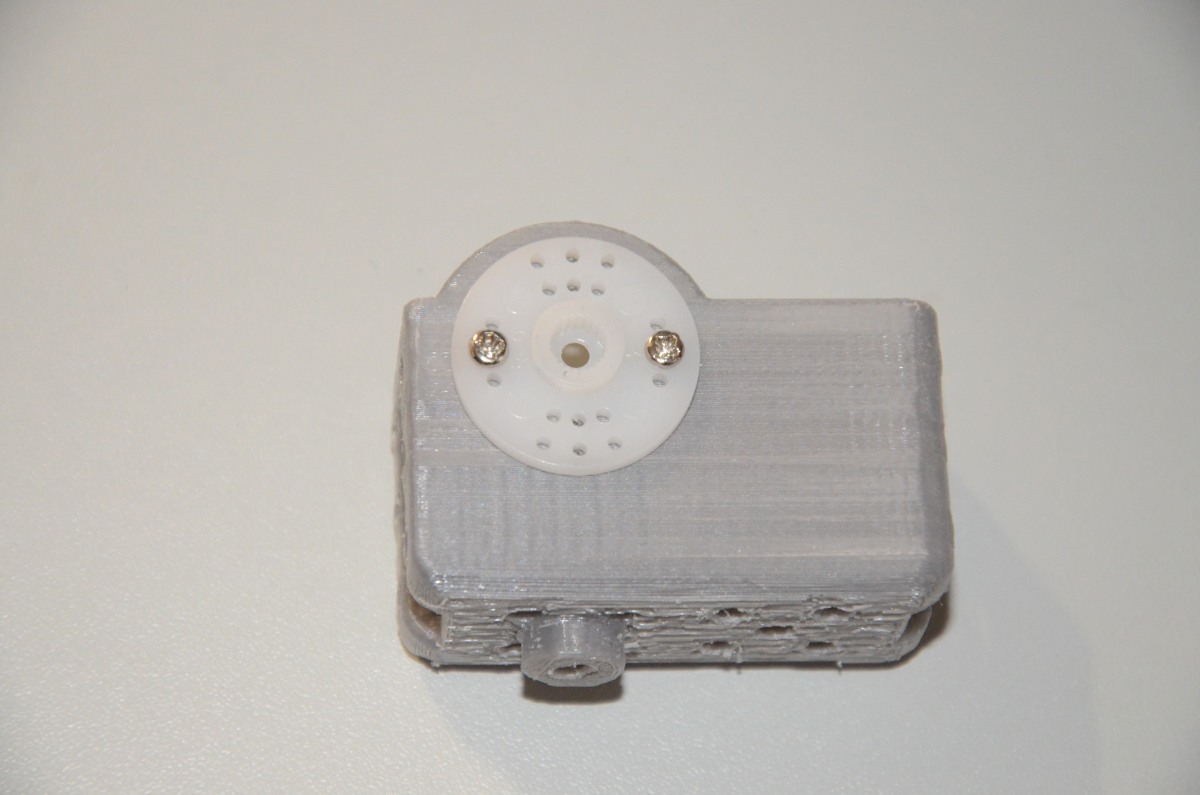
RedOhm : Montage du palonnier
| Retour au sommaire |
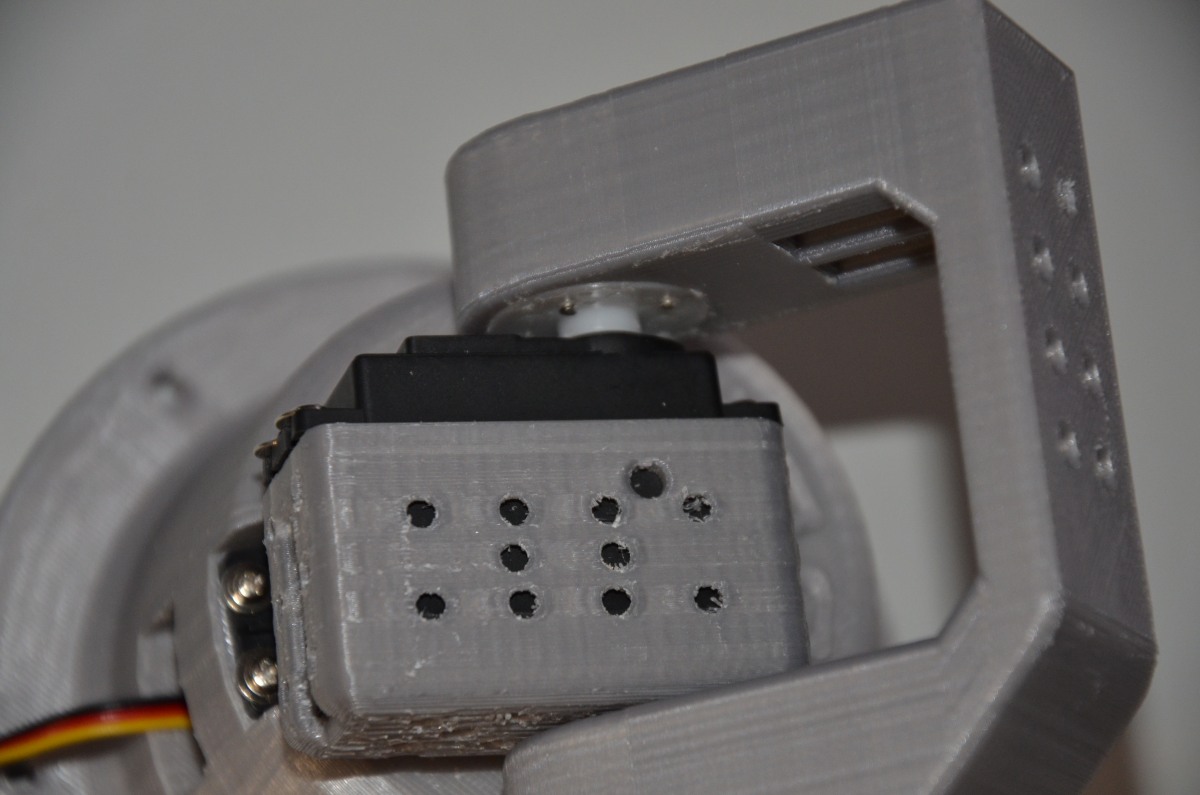
3:Assemblage de la cage sur le servomoteur de la base .
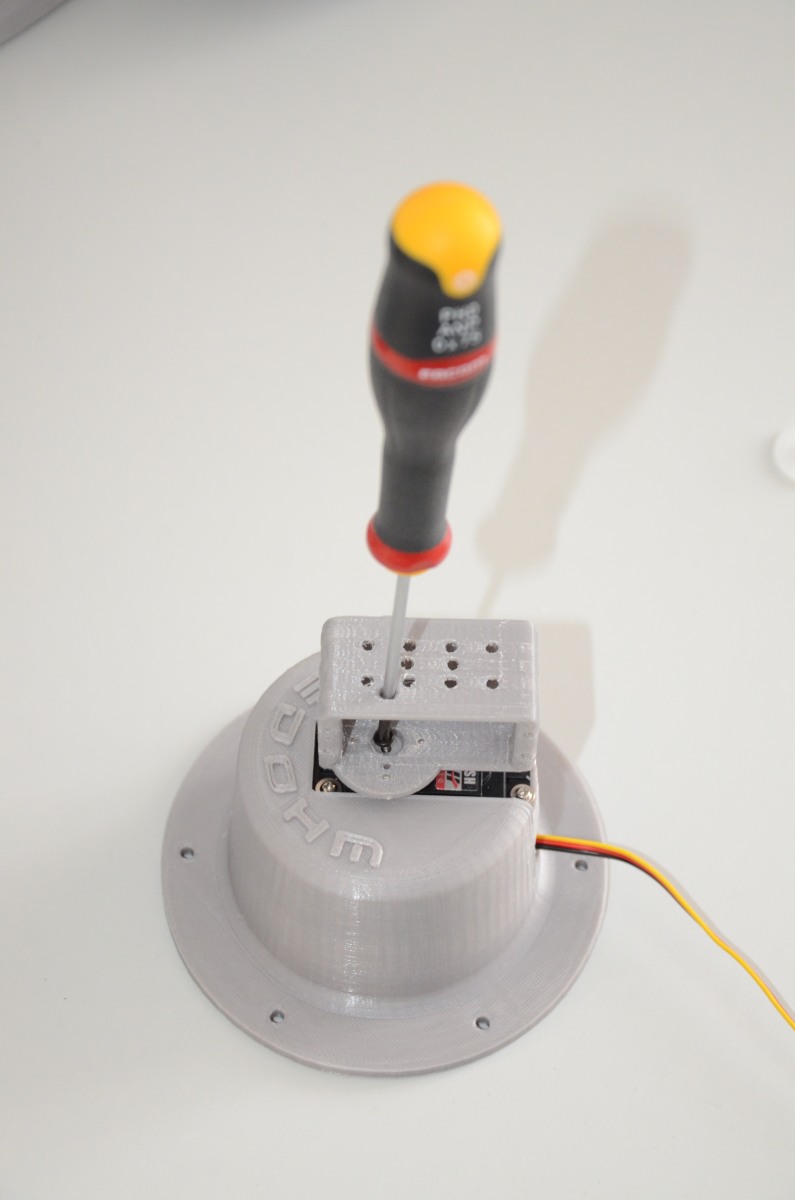
Redohm : On passe un petit tournevis dans l’orifice de la cage porte servo prévu pour ce type de montage
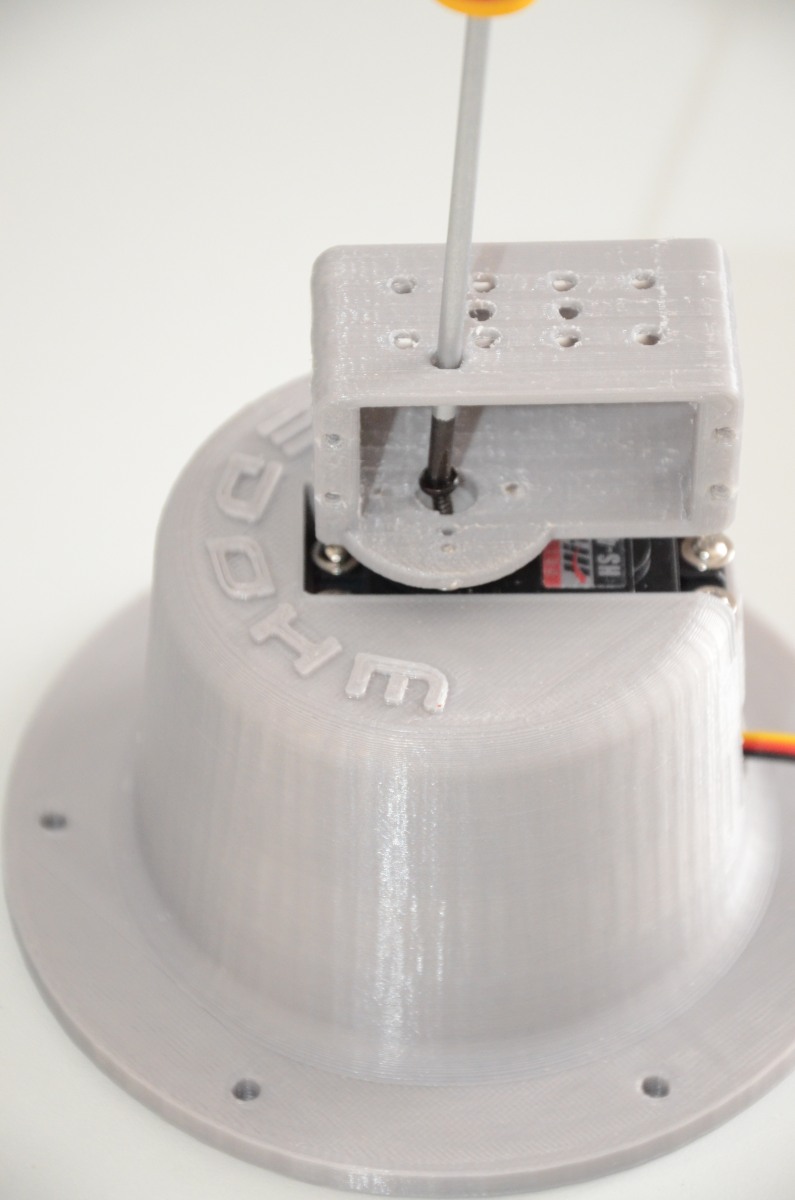
Redohm : Vue en gros plan
| Retour au sommaire |
4:Montage du servo porte bras .

Redohm : Montage du servo porte bras
| Retour au sommaire |
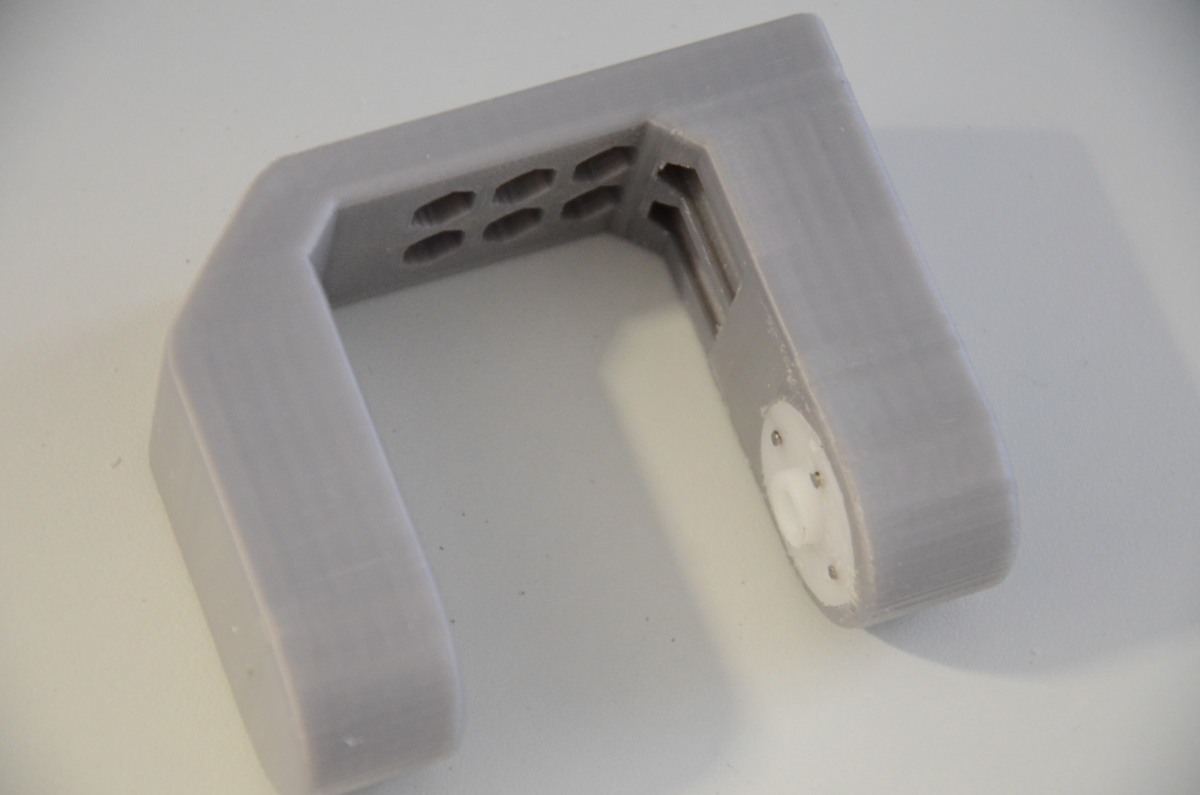
5:Assemblage du bras et montage du Palonnier type roue dans le bras ( en général ce type de palonnier est vendu avec son servo ) .
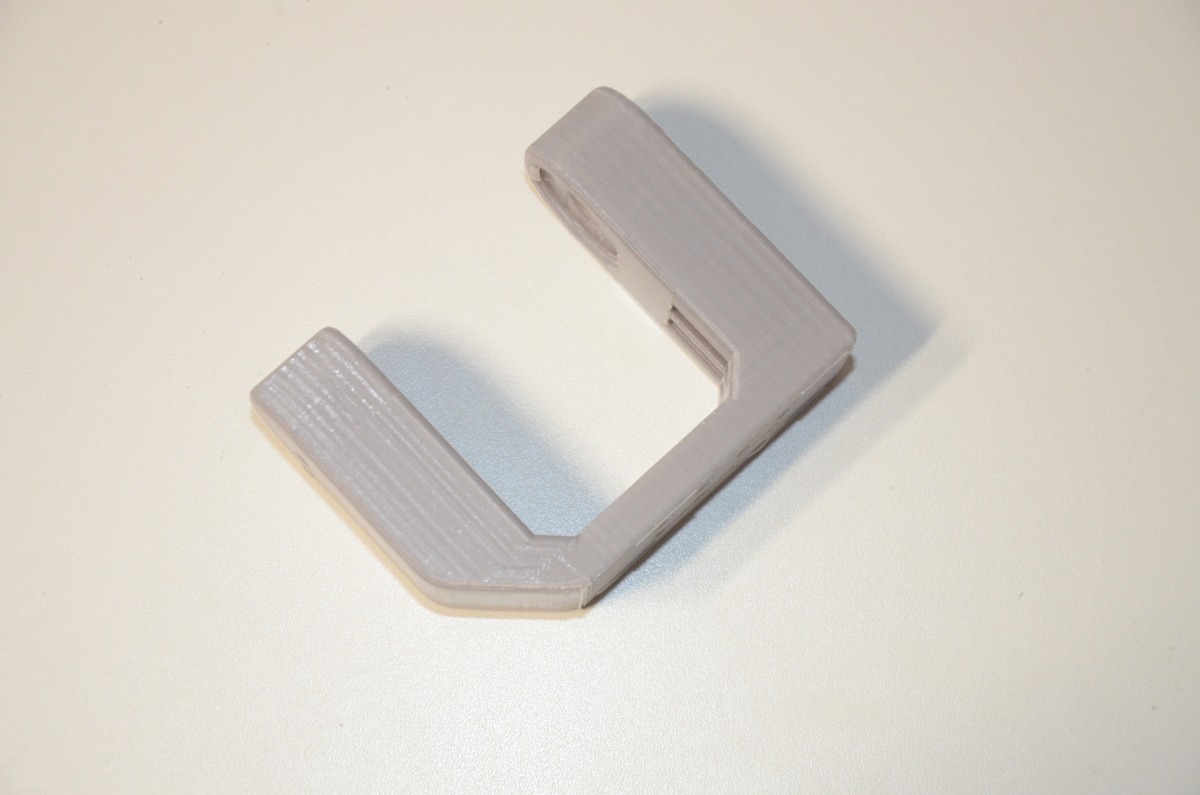
Redohm : Vue du bras fig.10

Redohm : Vue du bras fig.11
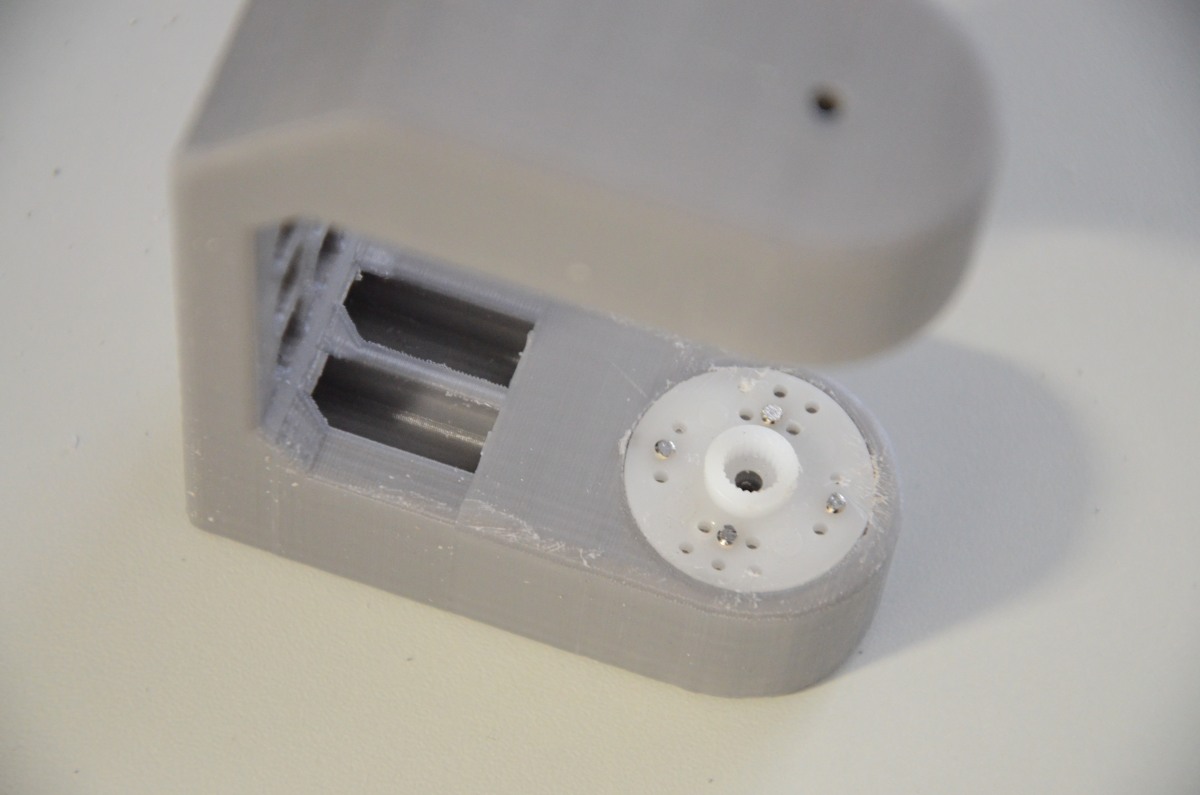
RedOhm : Montage du palonnier fig.20
RedOhm : Montage du palonnier fig.21
Redohm: Montage de l’ensemble fig.22
Redohm:Vue d’ensemble fig.23
| Retour au sommaire |
6:Assemblage de la partie haute .
Redohm:Support haut fig.60
Redohm: Support servomoteur superieur fig.61
Redohm : Vue d’ensemble fig.62
Redohm : Vue d’ensemble avec servomoteur et support fig.63
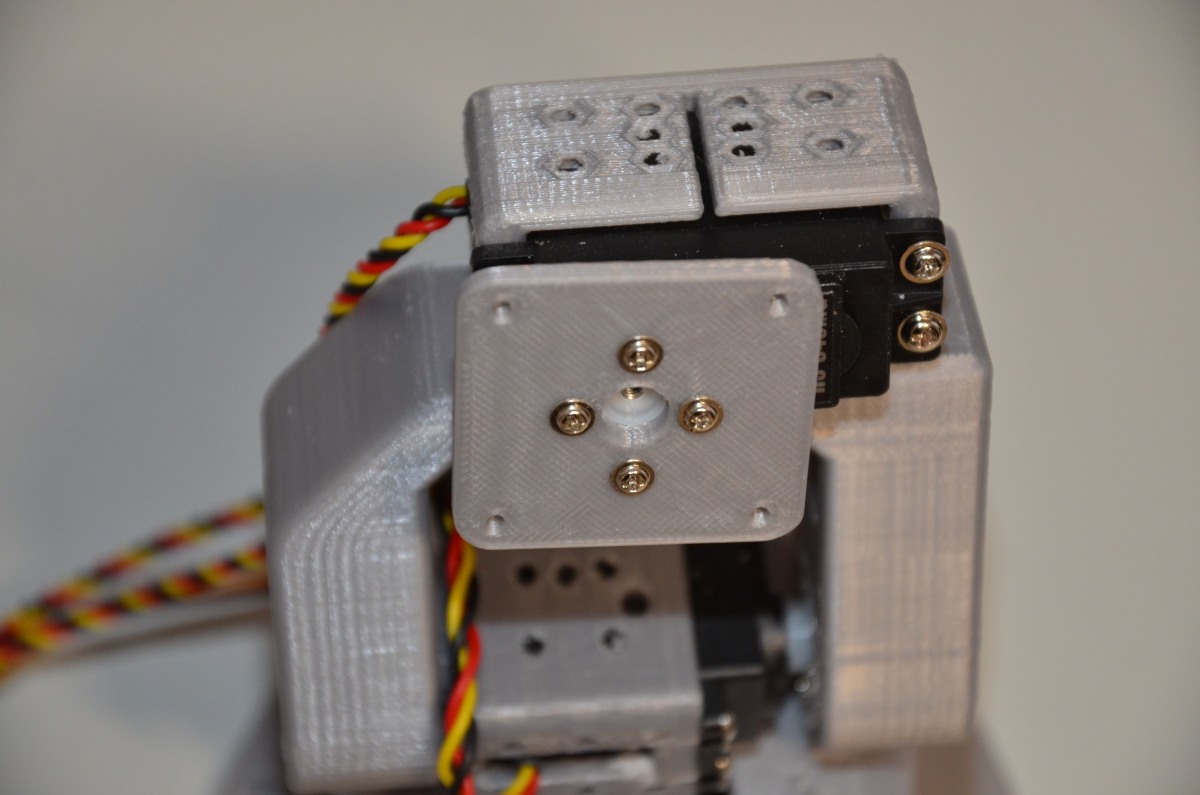
Redohm : Vue d’ensemble avec servomoteur et support fig.64
| Retour au sommaire |
![]()
Ensemble des fichiers pour l’impression 3D. |
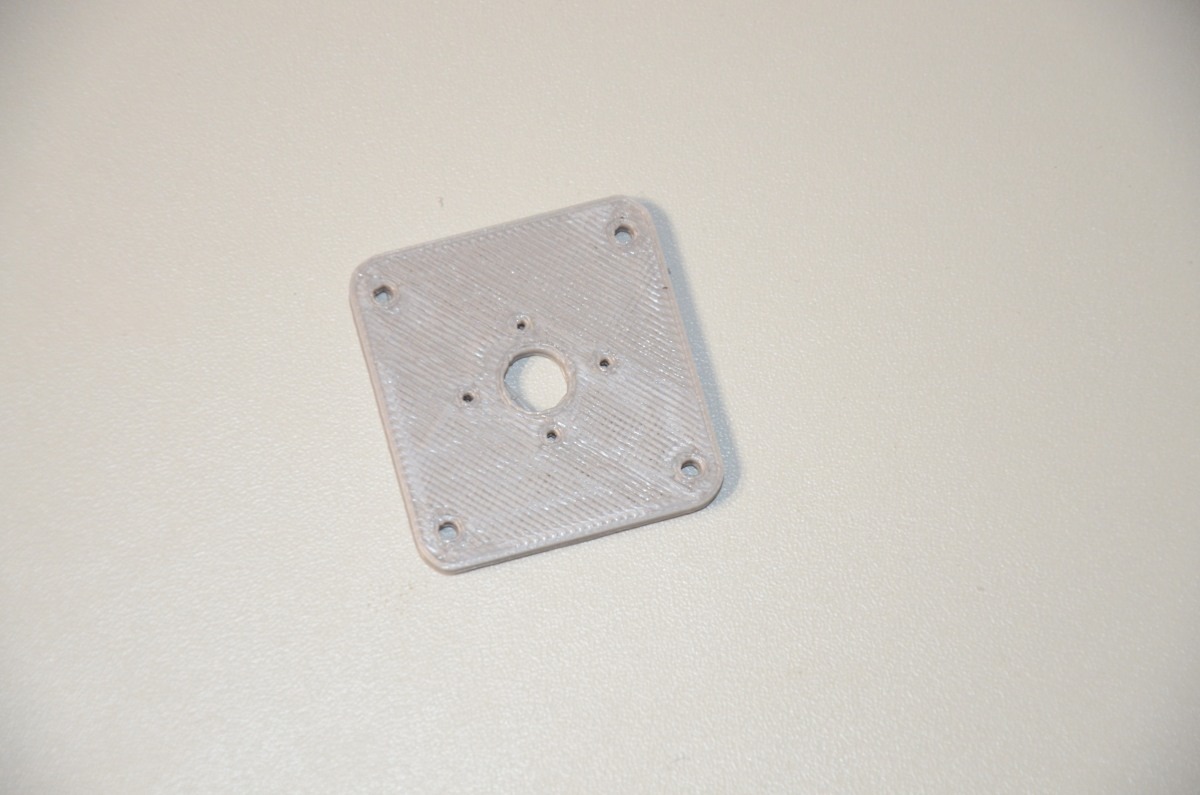
Piece 001 : Base du support 3 axes
Piece 001 : Base pour support 3 axes
Temps d’impression pour un remplissage de 30% ⇒ 7h21mm
Matière : PLA 120.01g
Résolution : 0.2mm
Télechargement de : Piece 001-Base du support 3 axes
.
![]()
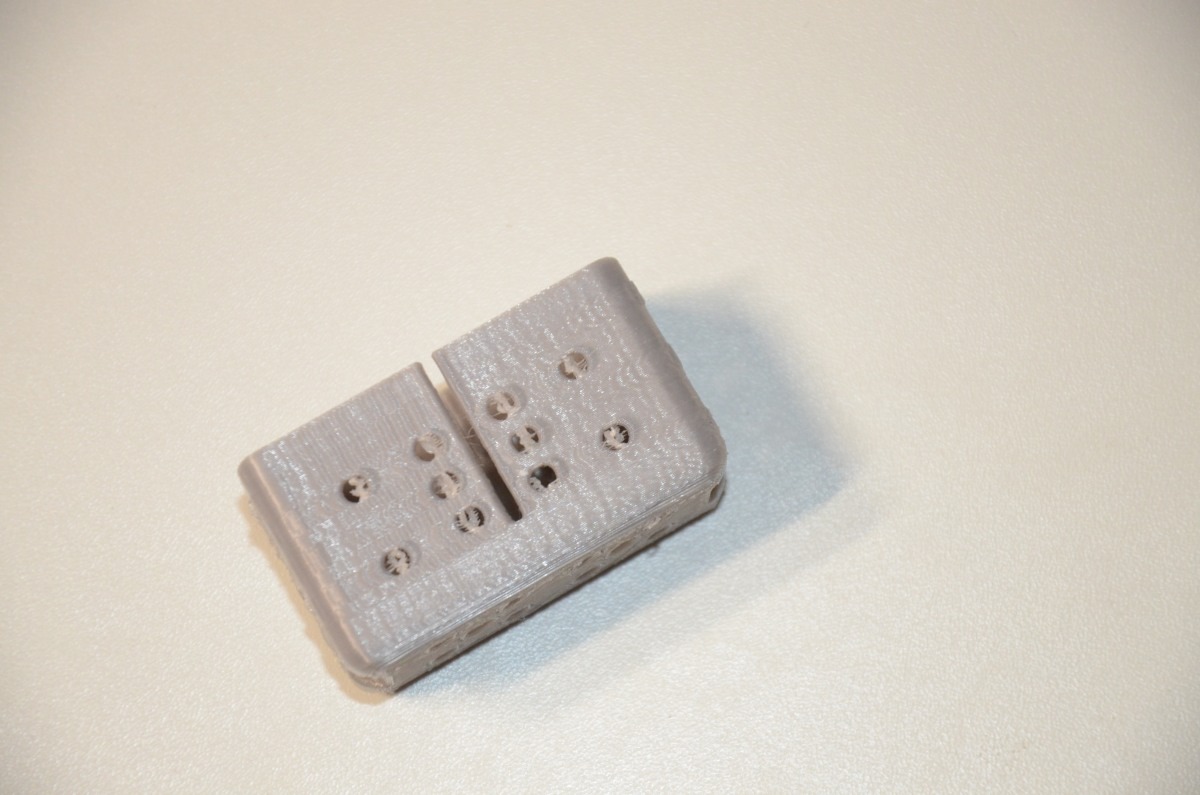
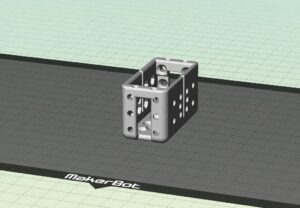
Piece 002 : Cage support servomoteur partie bras

Piece 002 : Cage support servomoteur partie bras
.
Temps d’impression pour un remplissage de 30% ⇒ 1h17mm.
Matière : PLA 16.62g (0.037lb)
Résolution : 0.2mm
Télechargement de : Pièce 002-Cage servomoteur partie bras
.
![]()
Piece 003 : Bras du support 3 axes

Bras pour support 3 axes
Temps d’impression pour un remplissage de 30% ⇒ 2h57mm
Matière : PLA 46.54g (0.103lb)
Résolution : 0.2mm
.
Télechargement de : Pieces 003-Bras pour support 3 axes
.
![]()
Piece 004 : Cage pour servomoteur partie haute
Piece 004 – Cage pour servomoteur partie haute
.
Temps d’impression pour un remplissage de 30% ⇒ 1h06mm
Matière : PLA 14.43g (0.023lb)
Résolution : 0.2mm
.
Télechargement de : Piece 004-Cage servomoteur partie haute
.
![]()
Piece 005 : Support supérieure
Piece 005- Support supérieure fig 005.1
.
Temps d’impression pour un remplissage de 30% ⇒ 00h21mm
Matière : PLA 6.64g (0.015lb)
Résolution : 0.2mm
.
Télechargement de : Piece 005-Support supérieure
.
![]()
Programme pour tester les limites mini et maxi du support 3 axes |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 |
// // // /* * RedOhm * * * Essai et reglage des servomoteurs a l'aide * d'un potentiometre en vue de determiner les * limites min et max * * Le 27/08/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // broche sur lequel est branche le potentiometre int brochepotar_de_position=2; // variable contenant la valeur de la potentiometre int valeur_potar_position; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { Serial.begin(9600); // associe le servomoteur a la broche 3 monservo.attach(3); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position=analogRead( brochepotar_de_position); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position=map(valeur_potar_position,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle monservo.write(valeur_potar_position); Serial.println(valeur_potar_position); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
.
Schéma de branchement de l’ensembles des actionneurs et potentiomètre .
1:Montage avec une carte Arduino Mega 2560
a) Liste du materiel pour câblage classique.
- 3 potentiomètre de 10kΩ
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Mega 2560
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
b) Liste du matériel avec utilisation du matériel Grove :
- 1 Module Grove Mega Shield V1.2 référence -> 103020027 .Le module Grove Base Shield est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino.
- 3 Potentiomètre à glissière Grove 101020036 ou potentiomètre rotatif Grove 101020048
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Mega 2560
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ) .Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
c) Schéma électrique de principe.
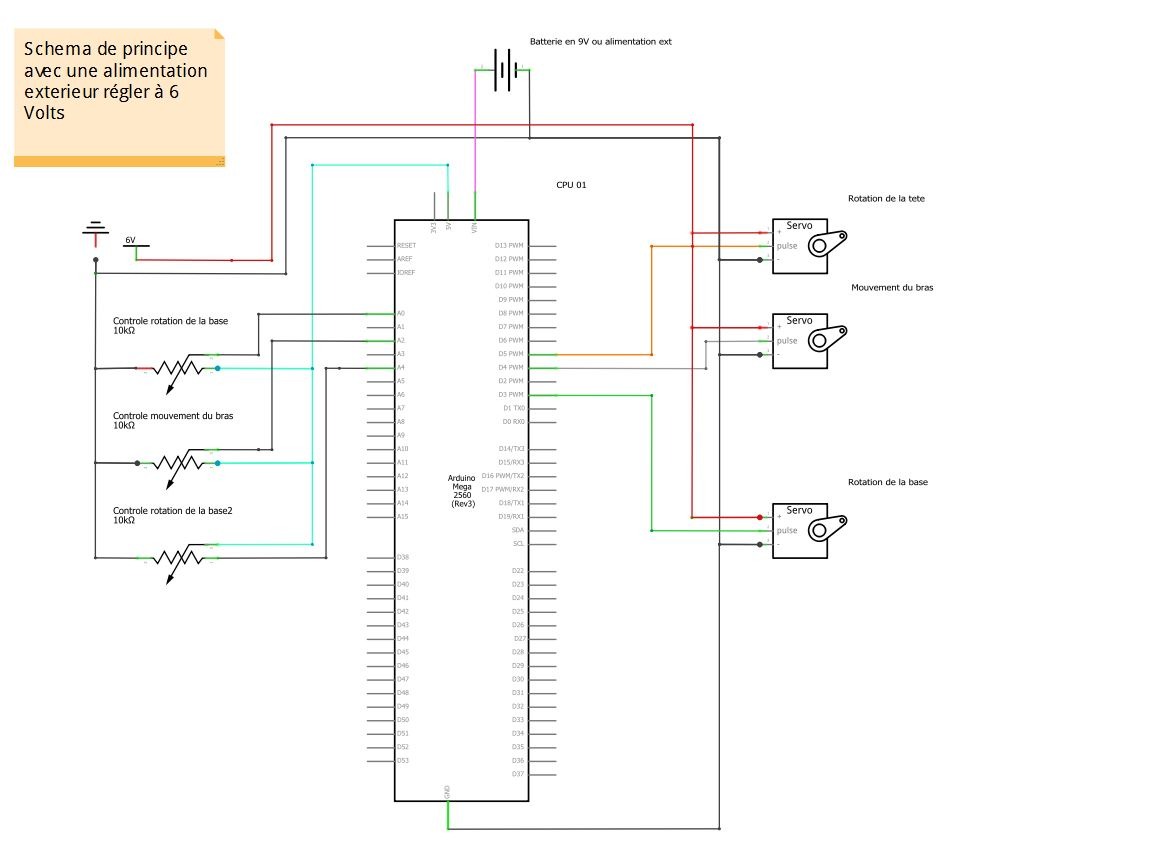
- Redohm : Schéma avec un Arduino Mega cliquez sur le dessin pour l’agrandir
d) Exemple de programme sur Arduino Mega
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
/* * * * *RedOhm * * *Programme pour piloter separement chaque moteur du support *trois axes * *le 27/08/2016 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo" pour la rotation de la base, nommé -> servobase Servo servobase; // Crée un objet de type "Servo" pour l'elevation du bras, nommé -> servobras Servo servobras; // Crée un objet de type "Servo" pour la rotation de la tete, nommé -> servotete Servo servotete; // broche sur lequel est branche le potentiometre servant a piloter le servobase int brochepotar_de_position_servobase=0; // variable contenant la valeur du potentiometre pour le servobase int valeur_potar_position_du_servobase; // broche sur lequel est branche le potentiometre servant a piloter le servobras int brochepotar_de_position_servobras=2; // variable contenant la valeur du potentiometre pour le servobras int valeur_potar_position_du_servobras; // broche sur lequel est branche le potentiometre servant a piloter le servotete int brochepotar_de_position_servotete=4; // variable contenant la valeur du potentiometre pour le servotete int valeur_potar_position_du_servotete; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur Serial.begin(9600); // associe le servomoteur servobase a la broche 3 servobase.attach(3); // associe le servomoteur servobras a la broche 4 servobras.attach(4); // associe le servomoteur servotete a la broche 5 servotete.attach(5); Serial.println("**********************************"); Serial.println("* *"); Serial.println("*support 3 axes *"); Serial.println("* operationnel *"); Serial.println("* *"); Serial.println("**********************************"); Serial.println(" "); //pause presentation delay (5000); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { /* * * traitement pour la position de la base */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobase=analogRead( brochepotar_de_position_servobase); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobase=map(valeur_potar_position_du_servobase,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobase.write(valeur_potar_position_du_servobase); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la base -> "); // affiche la valeur de la position de la base avec retour a la ligne Serial.println(valeur_potar_position_du_servobase); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position du bras */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobras=analogRead(brochepotar_de_position_servobras); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobras=map(valeur_potar_position_du_servobras,0,1023,54,120); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobras.write(valeur_potar_position_du_servobras); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle du bras -> "); // affiche la valeur de la position du bras avec retour a la ligne Serial.println(valeur_potar_position_du_servobras); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position de la tete */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servotete=analogRead(brochepotar_de_position_servotete); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servotete=map( valeur_potar_position_du_servotete,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servotete.write( valeur_potar_position_du_servotete); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la tete -> "); // affiche la valeur de la position de la tete avec retour a la ligne Serial.println( valeur_potar_position_du_servotete); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
| Retour au sommaire |
2:Montage avec une carte Arduino Uno
Liste du materiel :
- 3 potentiomètre de 10kΩ
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Uno
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
Liste du matériel avec utilisation du matériel Grove :
- 1 Module Grove Base Shield 103030000 . Le module Grove Base Shield est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino.
- 3 Potentiomètre à glissière Grove 101020036 ou potentiomètre rotatif Grove 101020048 .
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422 .
- 1 Carte arduino Uno
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V .
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
![]()
Arduino ensemble des cartes mères utilisé
par RedOhm
Mise à jour le 11/09/2016
Sommaire
- Guide pour bien choisir votre Arduino
- Arduino Uno ->
- Arduino + LCD 3,5 pouces
- Caractéristiques principales de l’Arduino + LCD 3,5 pouces
- Caractéristiques affichage LCD.
- Caractéristiques Arduino Controleur
- Arduino Mega 2560 Rev3
- Présentation de la carte Arduino Mega 2560.
- Caractéristiques principales de l’Arduino Mega 2560.
- Arduino Due
- Présentation de la carte Arduino Due.
- Arduino Intel Galileo
- Présentation de la carte Arduino Galileo.
- Composants clés de la carte Arduino Galileo.
- Carte mère série pro
L’ensemble de la gamme Arduino et programmables via un langage proche du « C » (disponible en libre téléchargement), les modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un logiciel fonctionnant sur un ordinateur.
***
Guide pour bien choisir votre Arduino |
|||||||||
| Type | Micro | Tension d’alimentation | Tension des bornes | Vitesse | Entrée Sortie | Entrée analogique | PWM | Sortie Ana |
UART |
| Arduino Nano 3.0 | ATMega328 | via port USB ou 5 Vcc régulée sur broche 27 ou 6 à 20 V non régulée sur broche 30 |
5 Volts | 16Mhz | 14 | 8 | 6 | 0 | |
| Arduino Uno R3 | ATmega328 | 7-12 Volts | 5 Volts | 16Mhz |
14 dont 6 disposent d’une sortie PWM |
6 | 6 | 0 | 1 |
| Arduino + LCD 3,5 ( clone) |
ATmega328p | 6-9 Volts | 5 Volts | 16Mhz | 14 | 6 | 6 | 0 | 1 |
| Arduino Mega 2560 R3 | ATmega2560 | 7-12 Volts | 5 Volts | 16MHz | 54 | 16 | 14 | ||
|
Arduino DUE |
AT91SAM3X8E | 3.3Volts | 84MHz | 54 broches d’E/S dont 12 PWM | 12 | 2 | 4 | ||
| Arduino Pro 328 | ATmega32U4 | 7-12 Volts | 3.3Volts | 8Mhz | 14 | 6 | 6 | ||
***
Arduino + LCD 3,5 pouces |

Ce module arLCD de EarthMake combinant une carte compatible Arduino Uno R3 avec un écran tactile LCD couleur de 3,5″ vous permet de réaliser un projet évolué très rapidement. La partie Arduino Uno est compatible avec la plupart des shields disponibles.
La carte Arduino se programme de la même manière qu’une carte Arduino classique via le logiciel IDE Arduino (cordon USB inclus).
La partie affichage LCD n’utilise que les entrées D0 et D1 et laisse libres toutes les autres entrées/sorties. Une librairie ezLCD est disponible pour l’affichage et le contrôle tactile sur l’écran LCD.
Caractéristiques principales du Arduino + LCD 3,5 » ( clone )
Affichage LCD
- 6-9V Tension de fonctionnement
- Arduino Uno R3 Compatible
- 3.5 « couleur TFT (Thin-Film Transistor) écran tactile LCD
- Résolution 320 x 240
- Couleurs 65k
- LCD rétro-éclairage
- 1 Rapport de contraste: 500
- 16-bit GPU
- Mémoire 4Mo Flash
- USB Mini-B Câble
Arduino Controleur
- Arduino UNO R3 compatible
- Processeur: 5 volts 16 MHz ATmega328
- E / S numériques: 14 (avec PWM disponible sur 6)
- Entrée analogique: 6
- Mémoire: Flash: 32k-.5k pour le chargement au démarrage
- SRAM: 2K
- 1K EEPROM
Cliquez sur ⇒ plus d’informations sur Arduino + LCD 3,5 »
Ou trouver le module arLCD – 3.5 écran tactile » ; Sparkfun
***
Arduino Mega 2560 Rev3 |
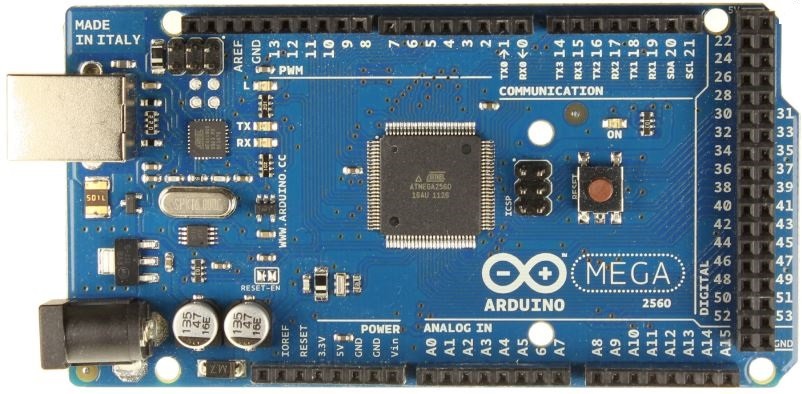
Arduino Mega 2650
1. Présentation de la carte Arduino Mega 2560 .
La carte Arduino Mega 2560 a été conçue comme la remplaçante de la carte Arduino Mega. Elle est dotée d’un microcontrôleur ATMega2560 disposant d’une mémoire flash de 256 KB, dont 8 KB dévolus au Bootloader ( Bootloader ? => il permet de télécharger vos programmes entre l’IDE Arduino (interface de développement) et votre Arduino; également la possibilité de pouvoir exécuter votre programme lors du démarrage de l’Arduino. ).
2. Caractéristiques principales.
– version: Rev. 3
– alimentation:
via port USB ou
7 à 12 V sur connecteur alim
– microprocesseur: ATMega2560
– mémoire flash: 256 kB
– mémoire SRAM: 8 kB
– mémoire EEPROM: 4 kB
– 54 broches d’E/S dont 14 PWM
– 16 entrées analogiques 10 bits
– intensité par E/S: 40 mA
– cadencement: 16 MHz
– 3 ports série
– bus I2C et SPI
– gestion des interruptions
– fiche USB B
– dimensions: 107 x 53 x 15 mm
Version d’origine fabriquée en Italie.
Cliquez sur ⇒ plus d’informations sur Arduino Mega 2560 Rev3
Prix moyen : De 39€ à 49 €
Ou trouver le module Arduino Mega : Gotronic ,Lextronic , RS Composant
***
Carte Arduino Due |
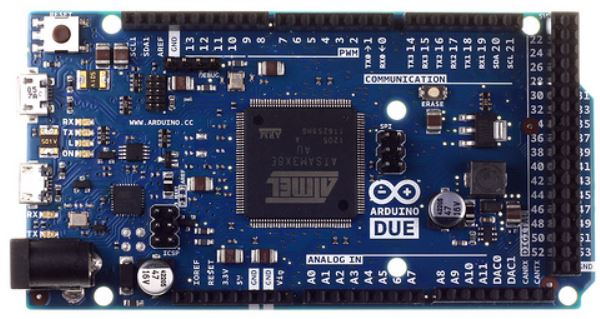
Arduino Due
La carte Arduino DUE est basée sur un Atmel ARM Cortex SAM3X8E cadencé à 84 MHz sous 32 bits. Elle dispose de 54 E/S dont 12 PWM, 12 analogiques et 4 UARTs. Elle est idéale pour des applications exigeant des caractéristiques plus complètes que la Uno.
Contrairement aux autres cartes Arduino, Les entrées/sorties fonctionnent sous 3,3 Vcc, l’utilisation de 5 Vcc en entrée ou en sortie n’est pas possible. Une tension supérieure endommagera la carte.
Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires. Elle peut se programmer avec le logiciel Arduino.
Un ATMega 16U2 permet la programmation du SAM3X8E via le logiciel Arduino (via le port Micro USB de programmation). Un deuxième port USB est relié directement sur le SAM3X8E permettant l’utilisation de clavier, souris etc.
Caractéristiques principales:
– version: Rev 3
– alimentation:
via port USB ou
7 à 12 V sur connecteur alim
– microprocesseur: AT91SAM3X8E
– tension d’utilisation: 3,3 Vcc
– mémoire flash: 512 kB
– mémoire SRAM: 96 kB
– 54 broches d’E/S dont 12 PWM
– 12 entrées analogiques 10 bits
– 2 sorties analogiques
– intensité par E/S: 3 ou 15 mA (selon la broche)
– intensité totale pour les sorties: 130 mA
– cadencement: 84 MHz
– 3 ports série
– bus I2C et SPI
– gestion des interruptions
– fiche micro-USB A (SAM3X8E) et micro-USB B (programmation)
– dimensions: 104 x 53 x 13 mm
Version d’origine fabriquée en Italie.
***
Carte Arduino Intel Galileo |
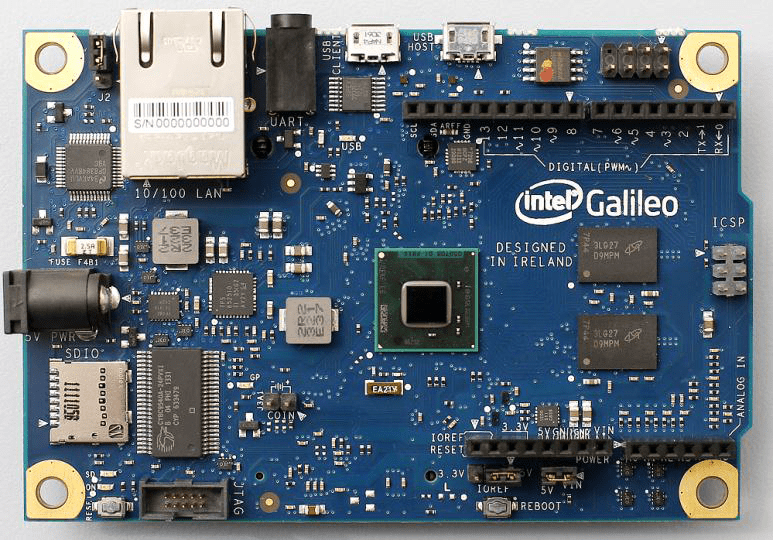
Arduino Intel Galileo
La carte Arduino Intel Galileo est une carte mère de développement basée sur le processeur Intel Quark SoC X1000, un système sur puce (SoC) Intel Pentium 32-bit. Il s’agit de la première carte basée sur l’architecture Intel qui peut recevoir des shields Arduino conçus pour la carte Arduino Uno R3. Les pins numériques de 0 à 13 (et les pins adjacents AREF et GND), les entrées analogiques 0 à 5, le header d’alimentation, le header ICSP et les pins du port UART (0 et 1) sont situés de manières identiques sur les cartes Arduino Intel Galileo et sur la carte Arduino Uno. Ce concept est également connu sous le nom dee brochage (« pinout ») Arduino 1.0.
La carte Arduino Intel Galileo a été conçue pour soutenir des shields qui fonctionnent soit à 3.3V ou à 5V. La principale tension de fonctionnement de la carte Arduino Intel Galileo est de 3.3V. Cependant un jumper sur la carte permet un passage de tension de 3.3v à 5V sur les pins d’entrées et de sorties. Cela fournit un soutien pour les shields Uno fonctionnant avec 5V et représente le comportement par défaut. En changeant la position du jumper, la tension de fonctionnement peut être ramenée à 3.3V sur les pins I/O.
En plus de la compatibilité matériel et logiciel Arduino, la carte Arduino Intel Galileo dispose également de la connectique pour étendre son usage et ses capacités au-delà de l’écosystème Arduino Shield: Mini-PCI Express, Ethernet 10/100 Mbps, Micro-SD, USB client, USB hôte, port série RS-232, port USB Host, port USB client et 8MByte NOR Flash.
Composants clés de la carte Arduino Galileo.
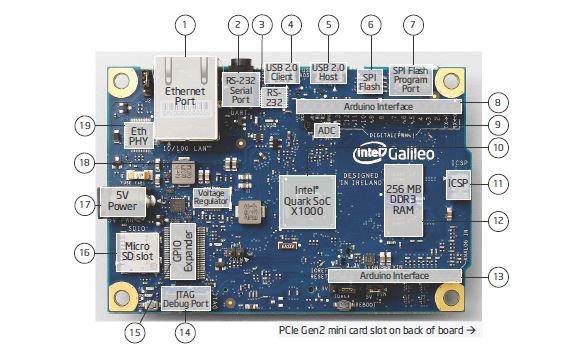
Composants clés de la carte Arduino Galileo
-
- Port Ethernet: Connecteur 10/100 Ethernet
- Port Série RS-232: Jack 3.5mm 3 pins
- Emetteur-récepteur RS-232
- Port client USB: Connecteur client USB: (Micro-USB Type B)
- Port hôte USB: Connecteur USB hôte 2.0 (Micro-USB Type AB)
- Mémoire Flash SPI: Mémoire Flash SPI pour stocker le firmware (ou le bootloader) et les derniers sketchs
- Port de programmation SPI: Header 7-pin pour une programmation via SPI (Serial Peripheric Interface)
- Interface Shield: Compatible avec le brochage de l’Arduino UNO R3
- CAN: Convertisseur analogique-numérique
- Intel® Quark SoC X1000: Processeur Intel® Pentium 400 MHz 32-bit
- Header ICSP: Header 6 pins pour la programmation série ‘En circuit’
- 256 MB DDR3 RAM
- Interface Arduino: Compatible avec le brochage de l’Arduino UNO R3
- Port Debug JTAG: Header 10 pins JTAG pour le debugging
- Extenseur GPIO
- Lecteur de carte MicroSD: Supporte les cartes MicroSD jusqu’à 32 GO
- Alimentation 5V: La carte est alimentée par un adaptateur AC-DC
- Régulateur de tension: Génère 3.3V d’alimentation
- Eth PHY: Physical layer Ethernet
Prix moyen : De 65€ à 75 €
Ou trouver le module Arduino Mega : Generationrobots
Carte mère série pro |

Carte Arduino M0 Pro
La carte Arduino M0 Pro est basée sur un Atmel ARM Cortex SAMD21 cadencé à 48 MHz sous 32 bits. La version pro est équipée d’un second microcontrôleur EDBG (AT32UC3A4256) et d’un second port USB permettant le débogage et la programmation du SAMD21 via le logiciel Arduino. Cette carte permet d’obtenir de meilleures performances, une meilleure flexibilité que la UNO et permet l’initiation au développement sur une architecture 32 bits.
La carte Arduino M0 Pro dispose deux ports USB:
– un premier port micro-USB (Native) permet d’utiliser le M0 comme un périphérique USB (comme une souris ou un clavier connecté à un PC, hôte USB, port série via programmation) et autorise la programmation (non recommandé).
– un second port micro-USB (Programming) recommandé pour la programmation et le débogage donnant accès au microcontrôleur principal SAMD21 via le microcontrôleur EDBG. Permet de reprogrammer le microcontrôleur principal en cas de plantage.
Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires. L’Arduino M0 pro se programme avec le logiciel Arduino 1.7.8 ou supérieur disponible sur le site Arduino.
– contrairement aux autres cartes Arduino, les entrées/sorties fonctionnent sous 3,3 Vcc, l’utilisation de 5 Vcc en entrée ou en sortie n’est pas possible. Une tension supérieure endommagera la carte.
– l’intensité maximale de sortie par E/S est de 7 mA.
Caractéristiques:
Alimentation:
– via port USB ou
– 6 à 15 Vcc sur connecteur alim
Microcontrôleur: ATSAMD21G18 ARM Cortex M0 32 bits
Microcontrôleur EDBG (Atmel’s Embedded Debugger): AT32UC3A4256
Mémoire flash: 256 kb (4 kB sont utilisés pour le bootloader)
Mémoire SRAM: 32 kB
Mémoire EEPROM: aucune disponible par défaut, possibilité d’émulation dans la SRAM
Tension de sortie: 3,3 Vcc
14 broches d’E/S dont 12 PWM et série
6 entrées analogiques 12 bits ADC
1 sortie analogique 10 bit DAC
1 broche d’interruption (D2)
Intensité par E/S: 7 mA
Cadencement: 48 MHz
Bus série, I2C et SPI
2 x Fiche micro-USB:
– 1 x usb programmation
– 1 x usb classique
Fiche d’alimentation: 5,5 x 2,1 mm
Dimensions: 69 x 53 x 10 mm
Référence Arduino: A000111
Version d’origine fabriquée en Italie.
Cliquez sur ⇒ Plus d’information sur la carte Arduino M0 pro
![]()
***
Mise à jour le 27/03/2017 : Le module Grove SEN10752P est un module pour Arduino permettant de recevoir des trames GPS aux normes NMEA. Seeedstudio propose quelques exemples d’utilisation sur leur site.