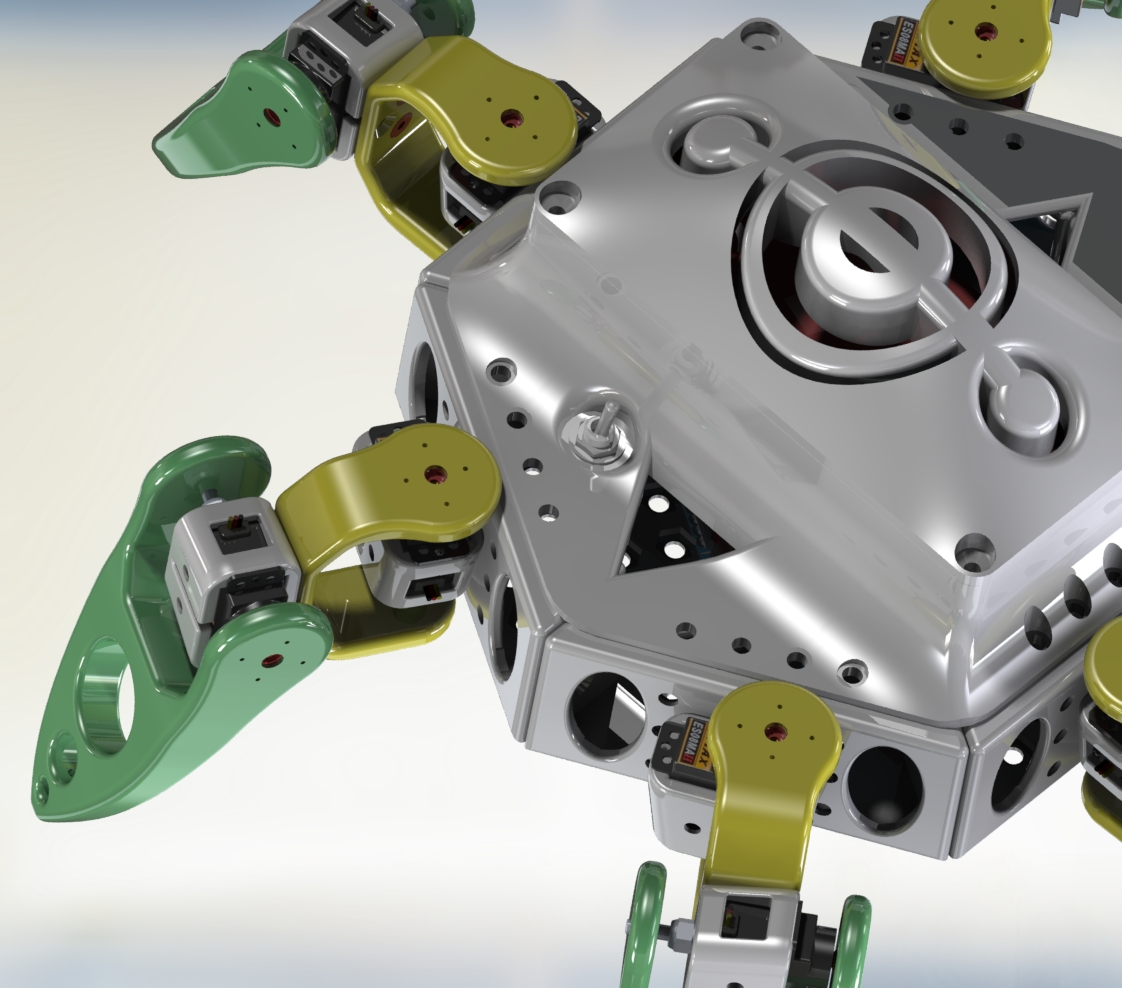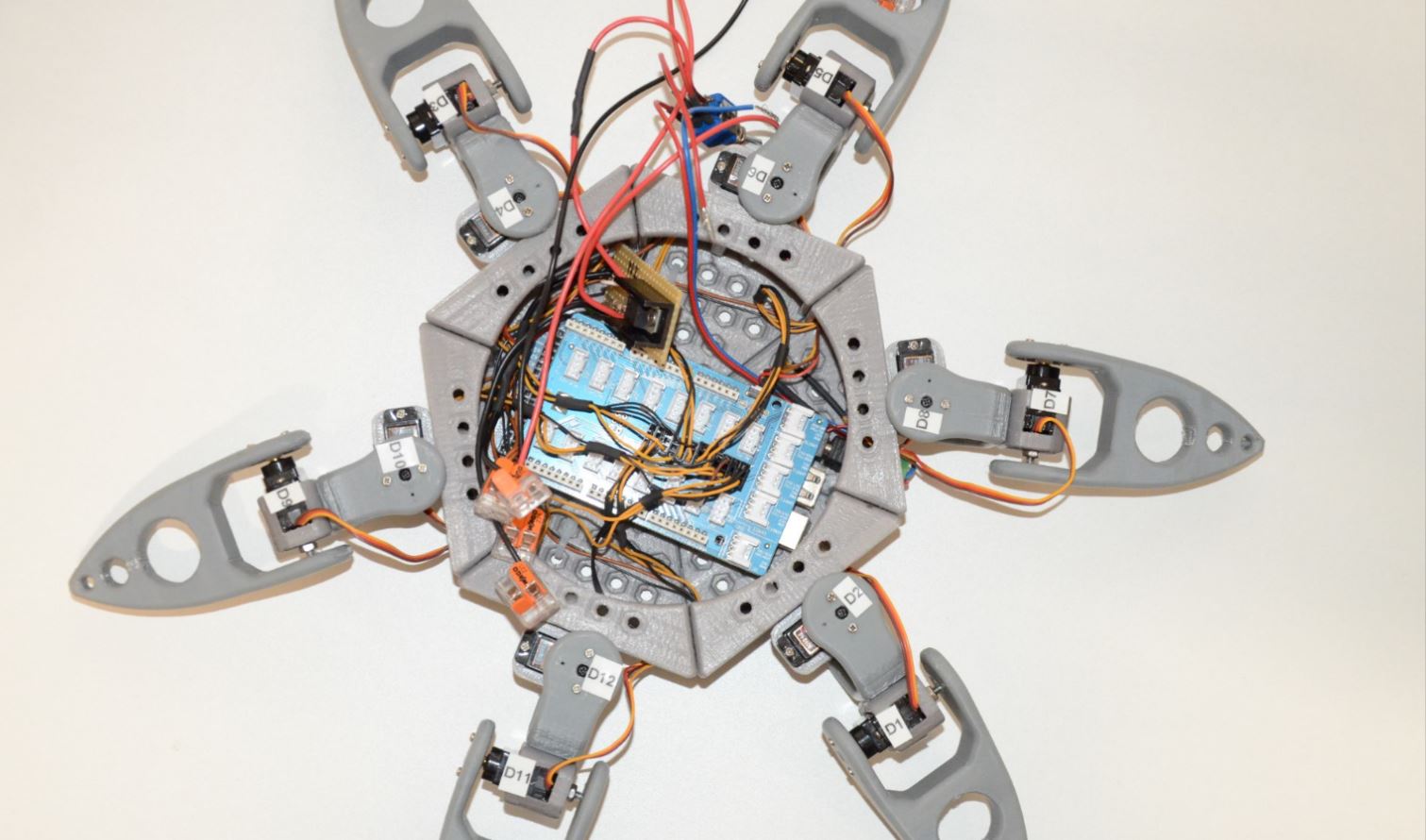
Robot Maya V1.00 – paupières Version V2-00 – RedOhm
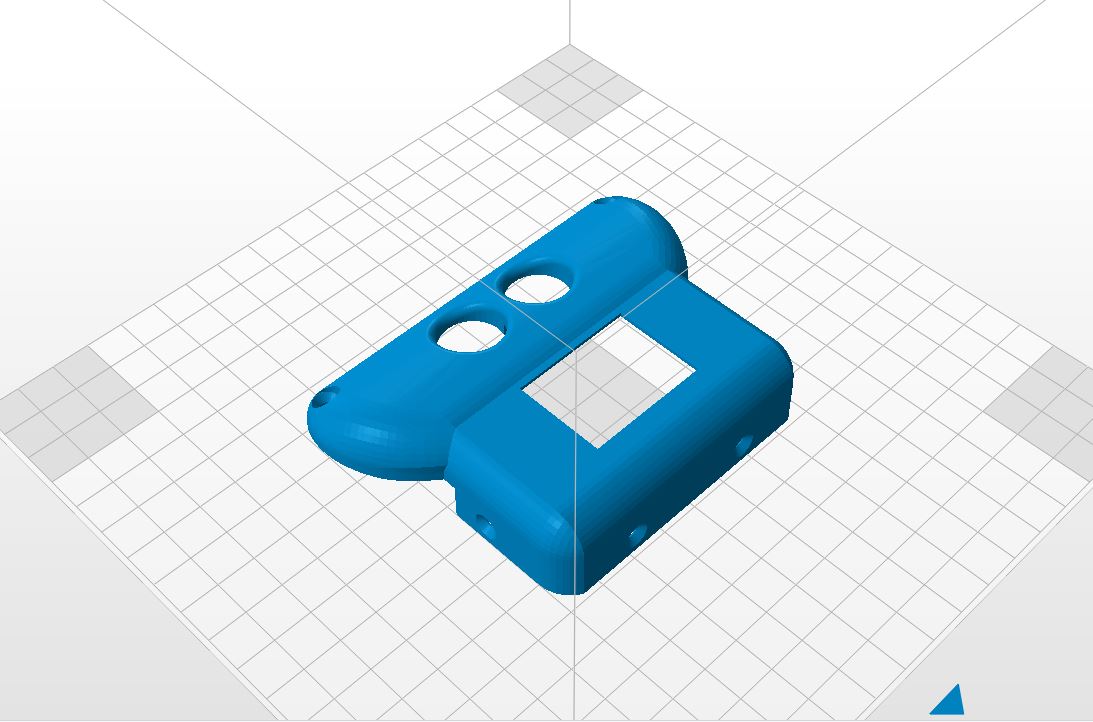
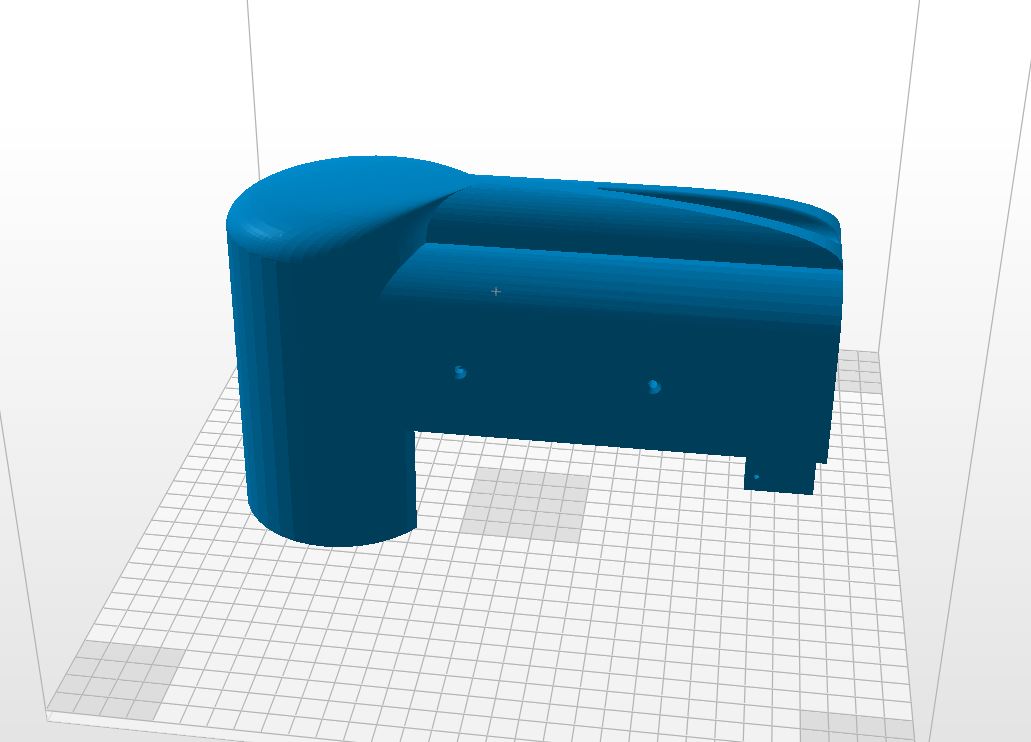
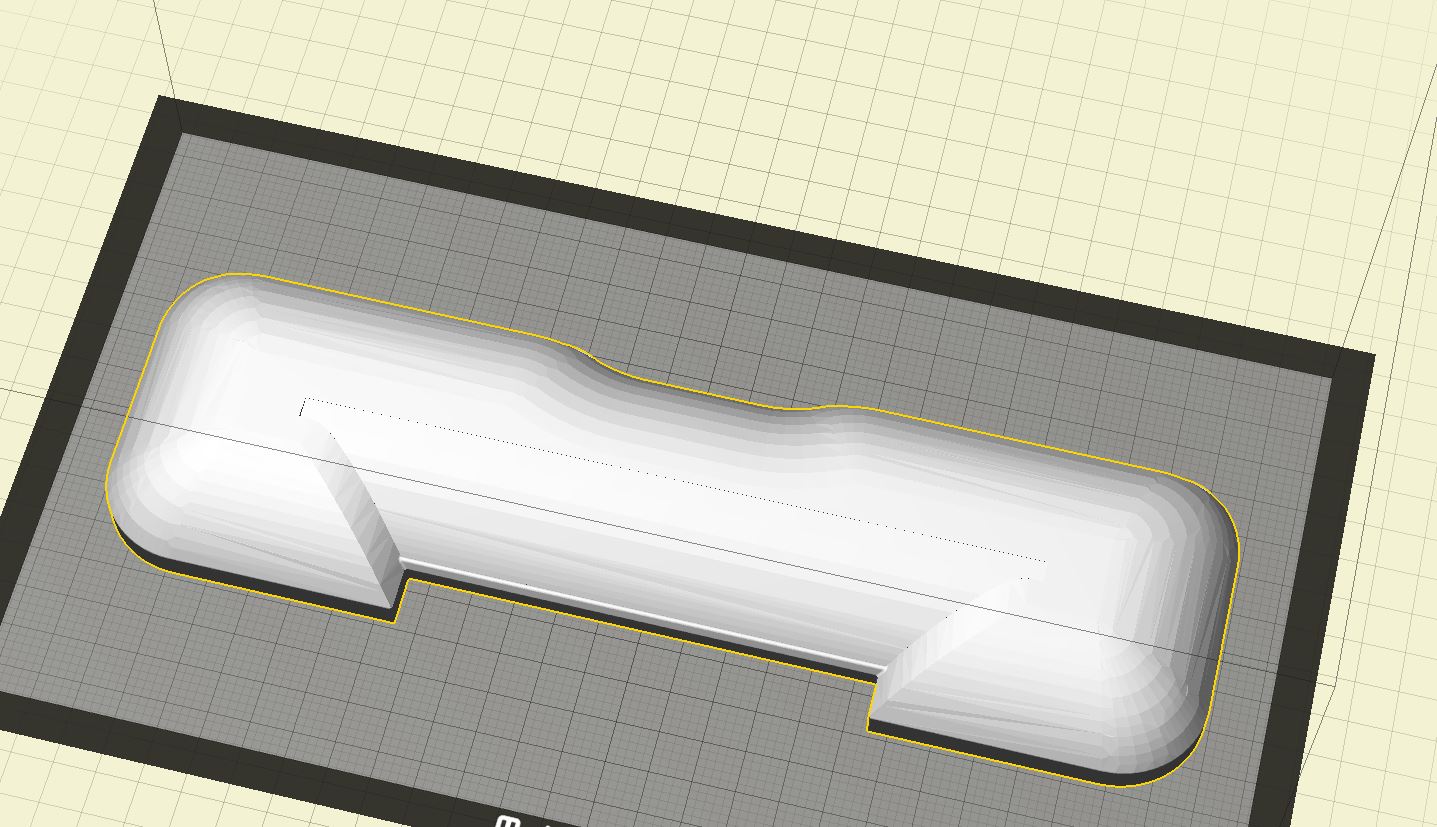
Information pour l’impression :
– Temps de réalisation :14h17mm
– Matière : 152 g
– Type de Matière :ABS ou PLA ou HIPS
– Remplissage : 20%
– Définition : Haute
– Température :configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour PLA : Un lit chauffé à 40°C
![]()