–
Mise à jour le 25/09/2019 – Rubrique traitant de la communication I2C entre 3 cartes Arduino Mega , dont 1 maître et 2 esclaves . Niveau de difficulté du tutoriel 4/10

Mise à jour le 31/01/2018 – Rubrique traitant du capteur Lidar de chez Seeedstudio permettant de mesurer des distances de 0,3 à 12 mètres. Ce module communique avec un microcontrôleur type Arduino ou compatible via une liaison série TTL.

Capteur Grove Lidar 114991434
![]()
Description du capteur Lidar de chez Seeedstudio |
La mesure de distance est basée sur la méthode Time-Of-Flight ce qui permet de mesurer précisément les distances grâce à des impulsions infrarouges.
ToF est l’abréviation de la technologie Time of Flight, et son principe de fonctionnement est le suivant: une lumière infrarouge modulée est émise par le capteur et réfléchie par un objet; la distance à l’objet à photographier peut être convertie avec le capteur en calculant la différence de temps ou la différence de phase entre l’émission de lumière et la réflexion de la lumière, de façon à produire l’information de profondeur.
Remarque: ce module doit être raccordé à un port série physique d’une carte Arduino. Les cartes basés sur un ATMega328 (Uno par exemple) ne possèdent qu’un seul port série physique, l’utilisation de ce capteur supprime la possibilité d’un retour sur le moniteur série et nécessite l’utilisation d’un écran LCD par exemple. Pour un retour sur le moniteur série, vous devez utilisez par exemple une carte Arduino Mega ou Seeeduino Lite qui comportent plusieurs ports série physiques.
Informations constructeur sur : http://wiki.seeed.cc/Grove-TF_Mini_LiDAR/
| Retour au sommaire . |
![]()
Logiciel – information constructeur – |
en cours
| Octet | Interprétation de l’encodage des données |
| Byte1 | 0x59, en-tête de trame |
| Byte2 | 0x59, en-tête de trame |
| Byte3 | |
| Byte4 | |
| Byte5 | |
| Byte6 | |
| Byte7 | Temps d’intégration. |
| Byte8 | Octets réservés |
| Byte9 | Parité de somme de contrôle |
| Retour au sommaire . |
![]()
A savoir sur l’utilisation des informations :
Les informations sur les caractéristiques et spécificités du capteur lidar qui sont fournis sur cette page correspondent aux informations des fiches techniques du constructeur si malgré le soin apporté à la réalisation de cet article une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable.
Les programmes , schémas et autres que ceux donnés par le constructeur font parti des montages utiles à nos applications si malgré le soin apporté à nos montages une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable .
L’ensemble des informations techniques de cet article a été utilisé pour nos applications, elles vous sont fournies comme un exemple de document de travail. Mais nous ne pourrions être tenu responsables d’une mauvaise utilisation de celle-ci.
| Retour au sommaire . |
Mise à jour le 18/02/2018 . Rubrique traitant de l’ensemble des pieces nécessaires à la construction du robot Maya .
Mise à jour le 07/01/2020 : Dans cet article vous trouverez les caractéristiques principales de la carte Arduino Uno WiFi , ainsi que les cartes additives de différents constructeurs pour son utilisation .
Mise à jour le 30/06/2019 : Dans cet article, vous est présenté le Servomoteur contrôle un système de pilotage multi servomoteurs, avec la possibilité de régler la vitesse de chaque servomoteur en mode automatique,mais la partie la plus polyvalente étant son coffret , une réalisation en #impression3d
Mise à jour le 15/11/2020: Ce télémètre compatible Grove permet de mesurer la distance de 3cm à 4m avec une resolution de 1cm , sans contact à l’aide de transducteurs à ultrasons.
Mise à jour le 13/10/2017 .Dans cet article, nous allons non seulement étudier le fonctionnement d’un chenillard, mais aussi la création de fonctions. Alors ! Une fonction c’est quoi ? Une fonction c’est ce qu’on pourrait également désigner sous le nom d’une procédure, de sous-programme ou d’une sous routine, c’est un ensemble d’instructions que l’on peut appeler dans n’importe quelle partie du programme principal. Dans cet article ,vous aurez la liste du matériel correspondant, un tutoriel vidéo pour vous guider dans la programmation, ainsi que le listing du programme d’origine.
Un tutoriel vidéo est en cours ainsi qu’un schéma électrique
Matériel utile pour le tutoriel étude d’un chenillard |
1 pièces : Module bouton poussoir Grove 101020003 ou bouton poussoir 111020000ou interrupteur Grove 101020004 .
Distributeur : Gotronic
1 pièces : Potentiomètre à glissière Grove 101020036 .Ce module potentiomètre compatible Grove délivre un signal analogique et est équipé d’une résistance de 10 kΩ idéale pour une utilisation avec les cartes Arduino ou compatibles.
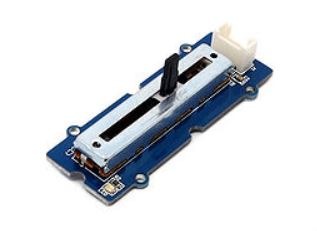
Potentiomètre à glissière Grove 101020036 . Pour la vitesse de défilement du chenillard
Distributeur : Gotronic / Lextronic
1 pièce : Carte Arduino MEGA 2560 . La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs. Elle est idéale pour des applications exigeant des caractéristiques plus complètes que la Uno. Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires.
Distributeur : Gotronic / Lextronic
1 pièce : Module Grove Mega Shield V1.2 103020027 . Le module Grove Mega Shield de Seeedstudio est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega. Il est compatible notamment avec les cartes Arduino Mega et Google ADK.
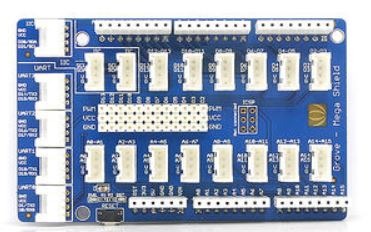
Module Grove Mega Shield V1.2 103020027 ( interface pour le chenillard utile mais pas obligatoire )
Distributeur : Gotronic
1 pièce :Le Relais 5 V à 8 Canaux est un module 5 V de relais à 8 canaux. Il peut être contrôlé directement par une large gamme de microcontrôleurs, comme Arduino, AVR, PIC, ARM et MSP430. Ce module comporte 8 relais avec des ports « NC » (normalement connecté à COM) et « NO » (normalement ouvert à COM). Ce module est également équipé de 8 LED qui montrent l’état des relais.
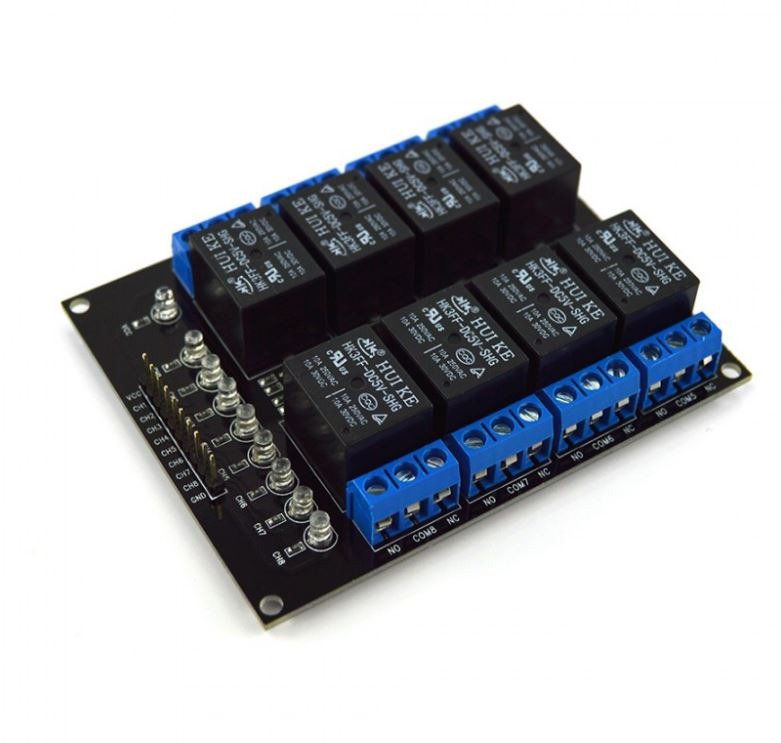
Relais 5V à 8 Canaux – Sorites pour le chenillard
Distributeur : Roboshop
Programme du chenillard avec information sur le moniteur |
Programme : Version du 10/10/2017
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 |
// // // ***************************************************** // * RedOhm * // * * // * * // * * // * CHENILLARD 8 SORTIES A RELAIS * // * * // * Utilisation des fonctions: * // * analogRead / map / digitalRead * // * * // * creation de fonctions (sous programme) * // * * // * 10/10/2017 * // * H.Mazelin * // ***************************************************** // Rappel sur la fonction d'une variable // // On peut définir une variable comme une boite ou l’on stock des // balles .Une variable est une boite ou l’on stock un nombre , // et comme il existe une multitude de nombres: // Exemple entiers ,décimaux etc …Il faut donc assigner un type à cette // variable // déclaration de l'entrée du bouton12 branché sur la broche 12 // de votre carte Arduino // bouton servant au demarrage des sequences du chenillard int bouton12 = 12; // déclaration des relais branchés sur les broches // de votre carte Arduino int relais1 = 11; int relais2 = 2; int relais3 = 3; int relais4 = 4; int relais5 = 5; int relais6 = 6; int relais7 = 7; int relais8 = 8; // variable du type int pour stocker la valeur de passage du bouton2 int bouton2v; // variable du type int pour stocker la valeur de clignotement int variable ; // déclaration de l'entrée analogique // ou se trouve le module potentiometre Grove int potar_pin = 2; // -------------------------------------------------------------------- // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // -------------------------------------------------------------------- void setup() { // ***************************************************** // Presentation du programme // // ***************************************************** // initialise le port de communication // et fixe la vitesse a 9600 bauds Serial.begin(9600); // affiche les differents messages sur l'ecran du pc Serial.println(" "); Serial.println("*************************"); Serial.println(" Programme le chenillard "); Serial.println(" realiser par "); Serial.println(" H-Mazelin "); Serial.println(" "); Serial.println("*************************"); Serial.println(" "); // on fait une pause du programme pendant 2000ms , soit 2 secondes delay(2000); // Affiche le message suivant => Appuyer sur le bouton pour demarrer le chenillard Serial.println("Appuyer sur le bouton pour demarrer le chenillard "); // Configure la broche spécifiée pour qu'elle se comporte soit en entrée, // soit en sortie.Dans notre cas en entrée pour le bouton2 pinMode(bouton12,INPUT); // Configure la broche spécifiée pour qu'elle se comporte soit en entrée, // soit en sortie.Dans notre cas en sortie pour l'ensemble des relais pinMode(relais1,OUTPUT); pinMode(relais2,OUTPUT); pinMode(relais3,OUTPUT); pinMode(relais4,OUTPUT); pinMode(relais5,OUTPUT); pinMode(relais6,OUTPUT); pinMode(relais7,OUTPUT); pinMode(relais8,OUTPUT); } // ---------------------------------------------------------------------- // Le programme principal s’exécute par une boucle infinie appelée Loop () // ---------------------------------------------------------------------- void loop() { // lis la valeur de la tension analogique présente sur la broche 2 // et introduit le resultat dans la variable "variable" variable = analogRead(potar_pin); // la valeur du potentiometre est comprise entre 0 et 1023 // Etalonnage de la valeur du potentiometre en valeur de temps // valeur de temps comprise de 50 a 1200 milliseconde // pour cela on utilise la fonction Map // map (variable ,valeur basse de depart,valeur haute de depart ,new valeur basse, new valeur haute ) // valeur basse de depart = 1 // valeur haute de depart = 1023 // new valeur basse = 100 // new valeur haute = 1200 variable =map( variable ,1,1023,100,1200); // lis l'état de la broche en entrée bouton2 // et met le résultat dans la variable bouton2v bouton2v = digitalRead(bouton12); // On realise le test suivant // si le bouton12 = 1 // alors on execute l'operation suivante -> demarrage du chenillard if (bouton2v == HIGH ) { // Appel de la fonction -> affichage_progressif() Serial.println ("Envoie de la sequence affichage -> progressif"); affichage_progressif(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_10101010() Serial.println ("Envoie de la sequence affichage -> sequence_10101010"); sequence_10101010(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_retour_au_centre() Serial.println ("Envoie de la sequence affichage -> sequence_retour_au_centre"); sequence_retour_au_centre(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_retour_au_centre() Serial.println ("Envoie de la sequence affichage -> sequence_retour_au_centre"); sequence_retour_au_centre(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_cylon1() Serial.println ("Envoie de la sequence affichage -> sequence_cylon1"); sequence_cylon1(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_cylon() Serial.println ("Envoie de la sequence affichage -> sequence_cylon"); sequence_cylon(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); Serial.println (" "); } // sinon on maintient le relais au niveau bas else { // Appel de la fonction -> mise_a_zero() mise_a_zero(); } } // ******************************************************** // la creation de la fonction -> // affichage_progressif // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void affichage_progressif() { // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais2 // ce qui active le relais digitalWrite(relais2, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais8 // ce qui active le relais digitalWrite(relais8, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // mise_a_zero // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* // écrit la valeur LOW (=0) sur la broche des relais // ce qui desactive l'ensemble des relais void mise_a_zero() { digitalWrite(relais1, LOW); digitalWrite(relais2, LOW); digitalWrite(relais3, LOW); digitalWrite(relais4, LOW); digitalWrite(relais5, LOW); digitalWrite(relais6, LOW); digitalWrite(relais7, LOW); digitalWrite(relais8, LOW); } // ******************************************************** // la creation de la fonction -> // sequence_10101010 // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_10101010() { // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_retour_au_centre // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_retour_au_centre() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 8 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais8, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2, HIGH); digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais3 et 6 // ce qui active les relais digitalWrite(relais3, HIGH); digitalWrite(relais6, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais4 et 5 // ce qui active les relais digitalWrite(relais4, HIGH); digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_cylon // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_cylon() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 8 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais8, HIGH); // écrit la valeur LOW (=0) sur la broche des relais2 et 7 // ce qui desactive les relais digitalWrite(relais2,LOW); digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2,HIGH); digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche du relais1 et 8 // ce qui desactive les relais digitalWrite(relais1,LOW); digitalWrite(relais8,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais3 et 6 // ce qui active les relais digitalWrite(relais3,HIGH); digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche des relais2 et 7 // ce qui desactive les relais digitalWrite(relais2,LOW); digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais4 et 5 // ce qui active les relais digitalWrite(relais4,HIGH); digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche des relais3 et 6 // ce qui desactive les relais digitalWrite(relais3,LOW); digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2,HIGH); digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche des relais4 et 5 // ce qui desactive les relais digitalWrite(relais4,LOW); digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_cylon1 // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_cylon1() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 2 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais2, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3,HIGH); // écrit la valeur LOW (=0) sur la broche du relais1 // ce qui desactive le relais digitalWrite(relais1,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4,HIGH); // écrit la valeur LOW (=0) sur la broche du relais2 // ce qui desactive le relais digitalWrite(relais2,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche du relais3 // ce qui desactive le relais digitalWrite(relais3,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche du relais4 // ce qui desactive le relais digitalWrite(relais4,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche du relais5 // ce qui desactive le relais digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais8 // ce qui active le relais digitalWrite(relais8,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais8,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche du relais7 // ce qui desactive le relais digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3,HIGH); // écrit la valeur LOW (=0) sur la broche du relais5 // ce qui desactive le relais digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais2 // ce qui active le relais digitalWrite(relais2,HIGH); // écrit la valeur LOW (=0) sur la broche du relais4 // ce qui desactive le relais digitalWrite(relais4,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1,HIGH); // écrit la valeur LOW (=0) sur la broche du relais3 // ce qui desactive le relais digitalWrite(relais3,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } |
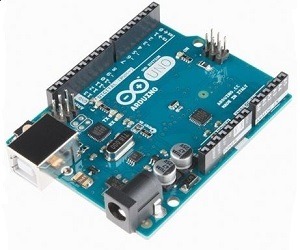 Arduino Uno Rev3
Arduino Uno Rev3

Maya support carte pour le thorax – RedOhm
![]()
Mise à jour le 09/05/2018.
Information |
Vous remarquerez sur l’ensemble des schémas nous relions toutes les masses des alimentations ensemble d’où le nom de masse commune. Il faut savoir que la masse dans un circuit électrique, est la branche de référence des potentiels électriques. Dans la grande majorité des cas le potentiel électrique de cette branche est la référence 0 V du circuit considéré.
Comment interpréter le numéro de fils sur le schéma. Prenons le cas du fils nommé 10–70 nous avons déjà le numéro de folio qui apparaît, dans ce cas le folio 10, derrière le tiret nous aurons le numéro de fils sur ce même folio dans ce cas nous avons le fil 70. Imaginez-vous, vous trouver avec un fil débranché dont le numéro est 17–30, imaginez la facilité pour rebrancher le fil, il suffit de consulter le folio 17 pour retrouver sur quel organe ce fil était branché.
Pour optimiser le fonctionnement des servomoteurs, nous travaillerons avec leurs tensions Max pour avoir le couple maximum de l’appareil concerné. Sur Maya nous avons des servomoteurs avec des tensions max de 6 V et des tensions de 7.4 V pour les servomoteurs plus importants. Nous possédons aussi une tension de 12 V appelée moteur, cette tension est réservée à l’alimentation des moteurs de déplacement, et enfin nous avons une tension d’alimentation appelée 12 V commande. Cette tension est séparée des autres pour éviter les perturbations engendrées par les différents moteurs.
| Retour au sommaire |
Folio 44 : Repérage des éléments du visage |
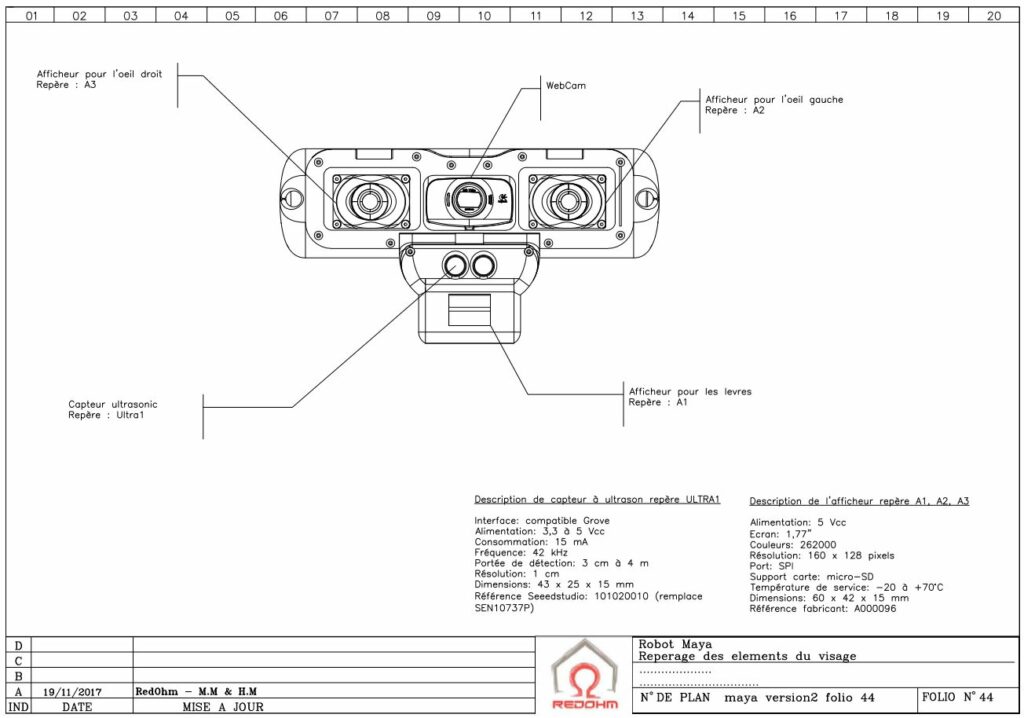
Folio 44 version 2 – Schéma du robot Maya
| Retour au sommaire |
Folio 48 : Repérage des cartes dans l’encéphale |
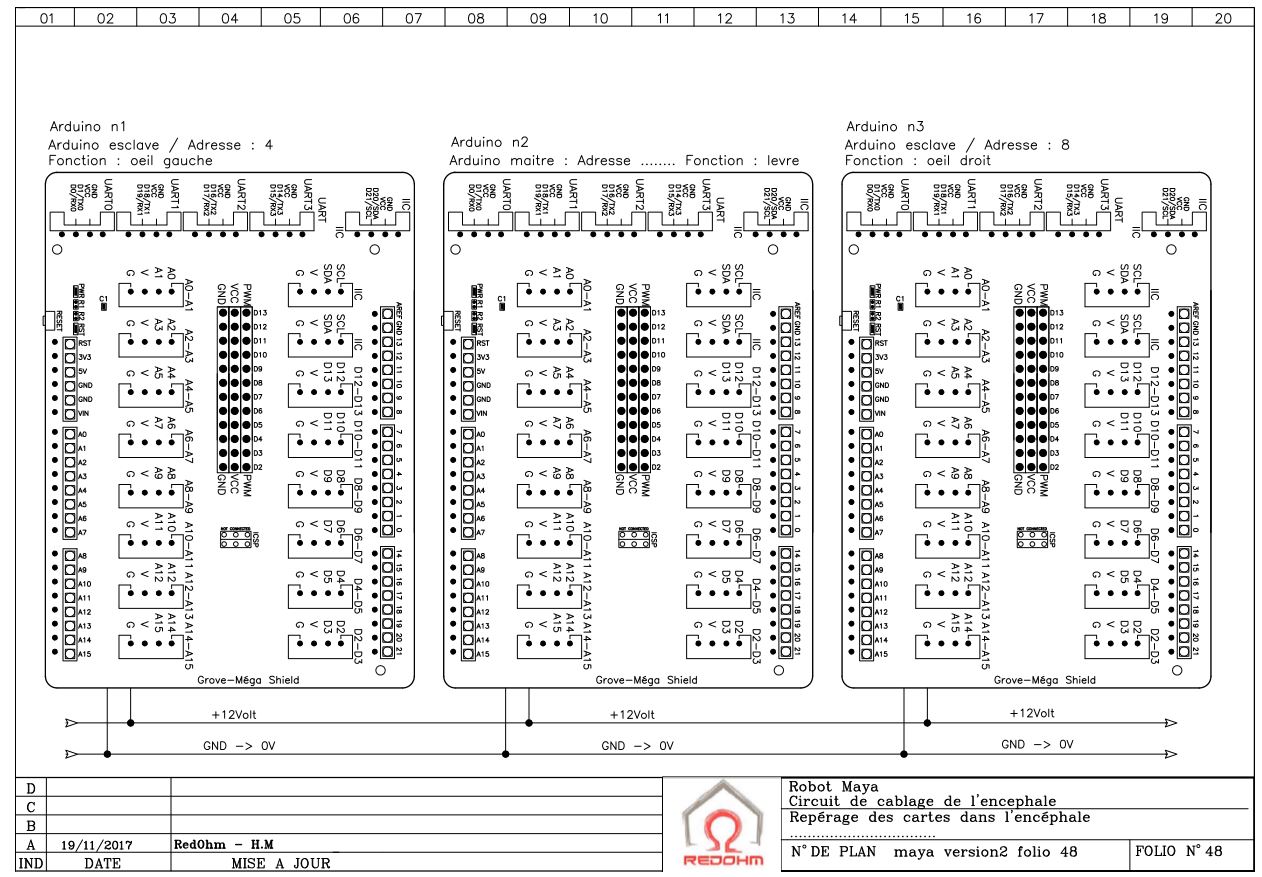
Folio 48 : Repérage des cartes dans l’encéphale
| Retour au sommaire |
Folio 50 : Carte Arduino n2 ( avec méga Grove ) |
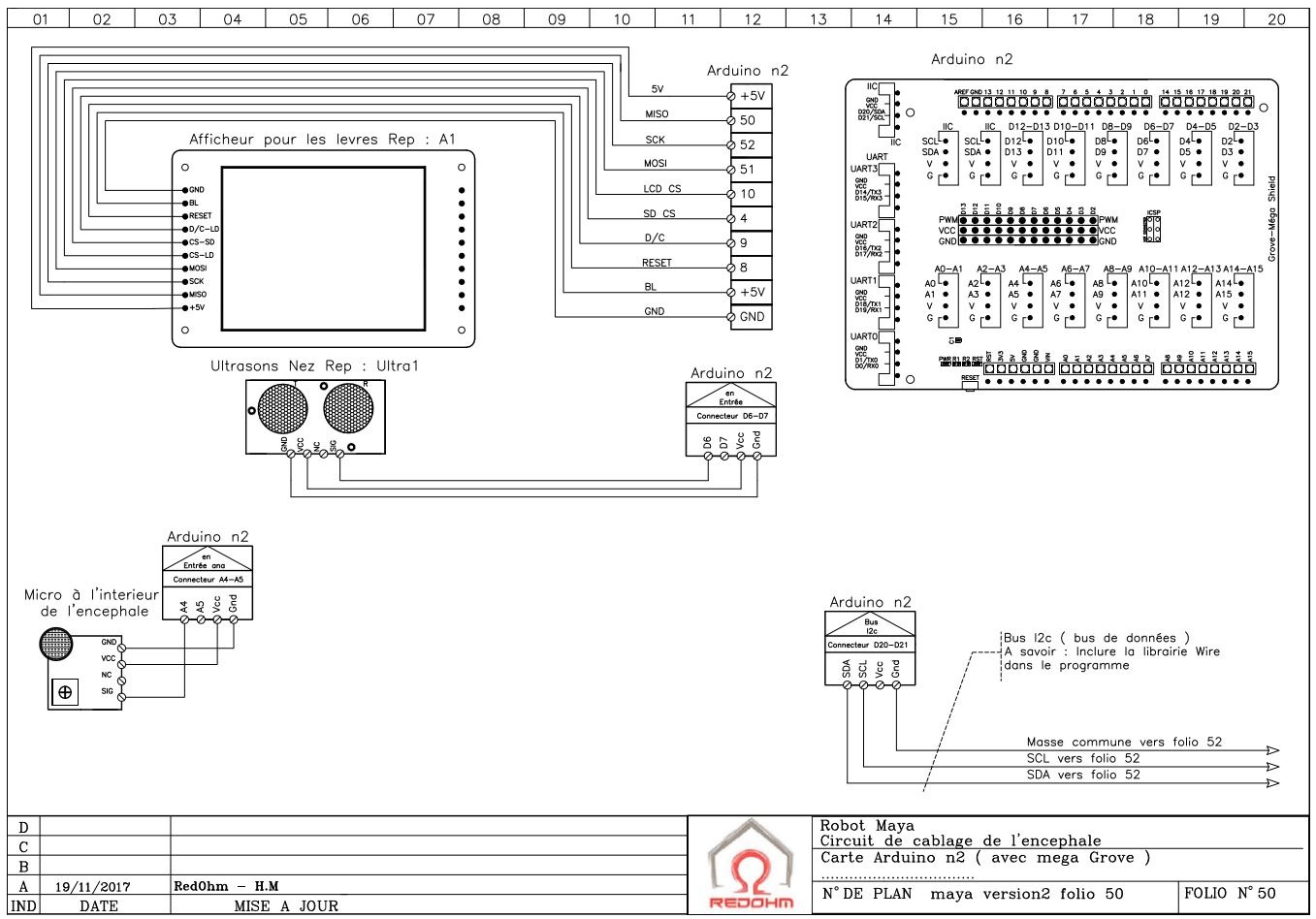
Folio 50 version 2 – Schéma du robot Maya
| Retour au sommaire |
Folio 52 : Carte Arduino n1 ( carte œil gauche ) |
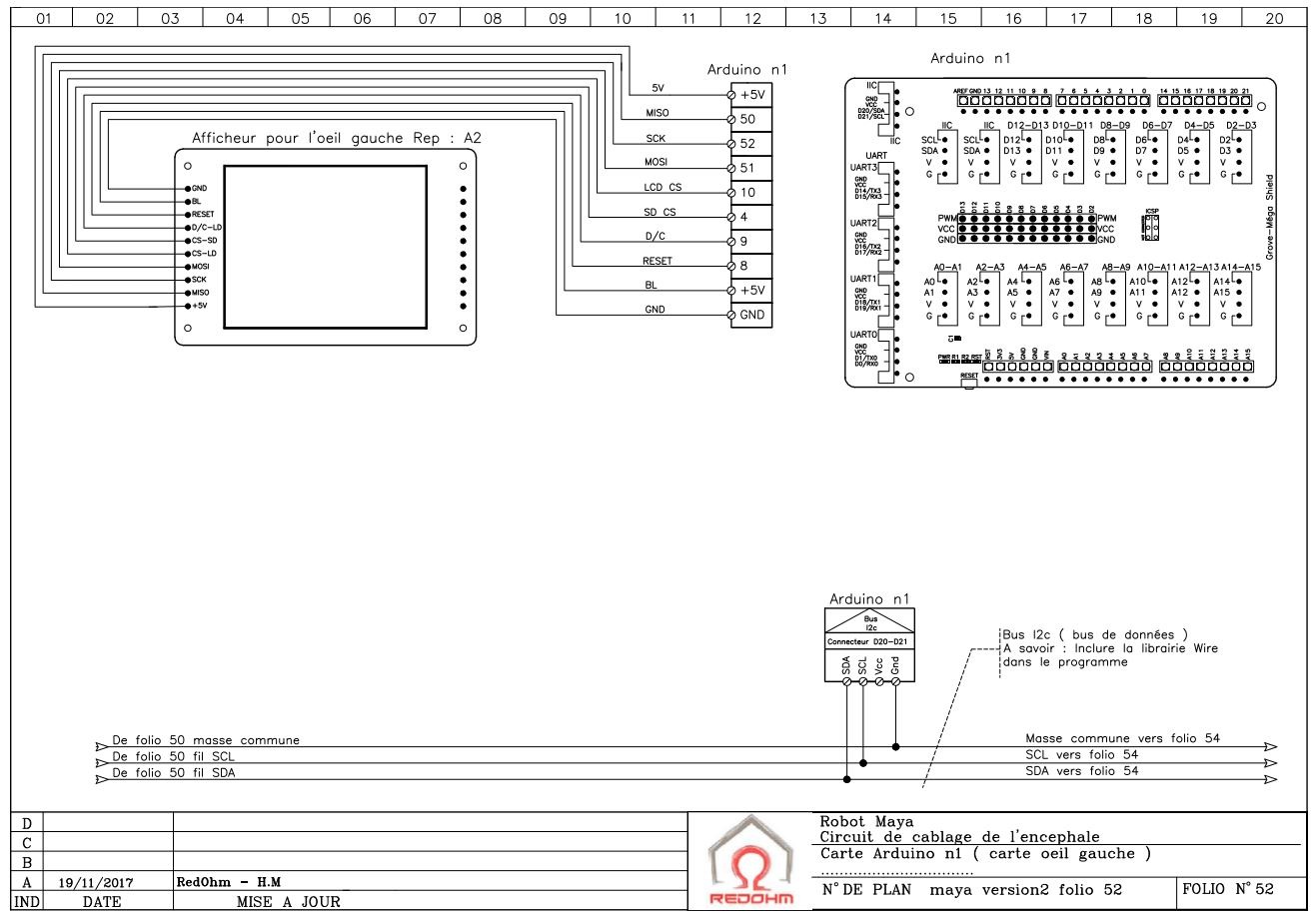
Folio 52 version 2 – Schéma du robot Maya
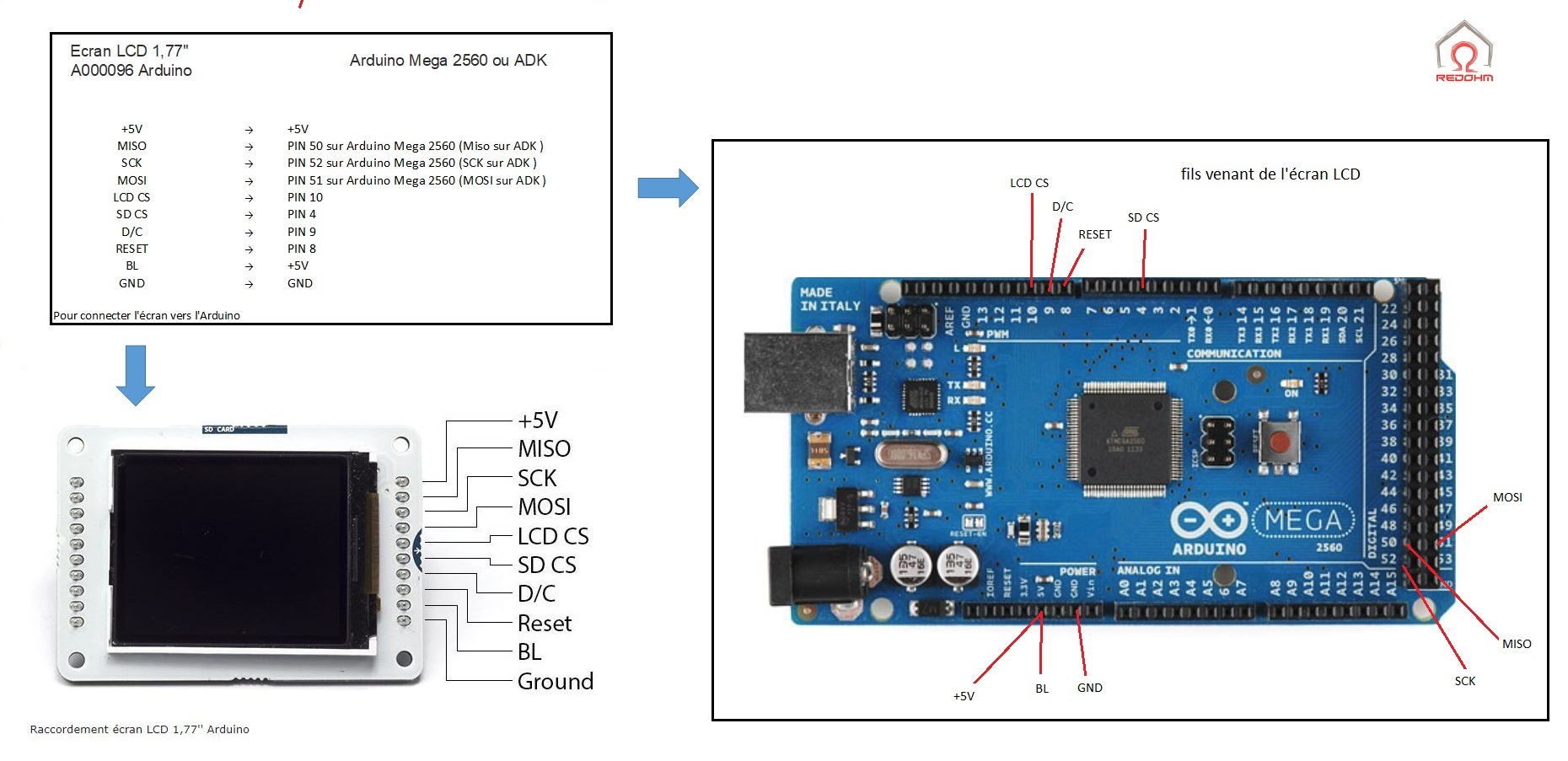
Aide au câblage de l’écran Lcd A000096 sur une carte Arduino Mega ou ADK
–
| Retour au sommaire |
Folio 54 : Carte Arduino n3 ( carte œil droit ) |
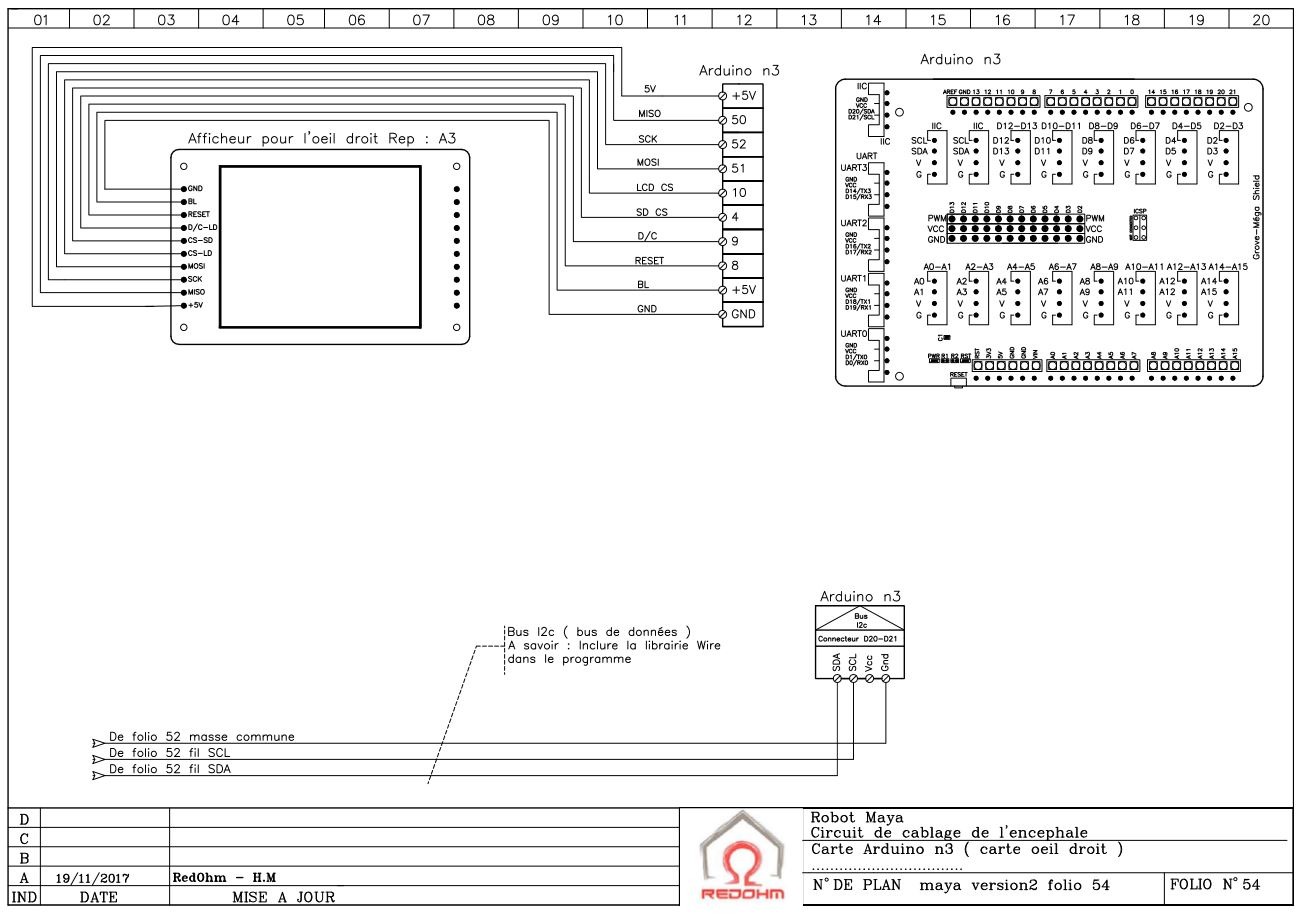
Folio 54 version 2 – Schéma du robot Maya
Aide au câblage de l’écran Lcd A000096 sur une carte Arduino Mega ou ADK
–
| Retour au sommaire |
Folio 100 : Carte Ez-Robot1 |
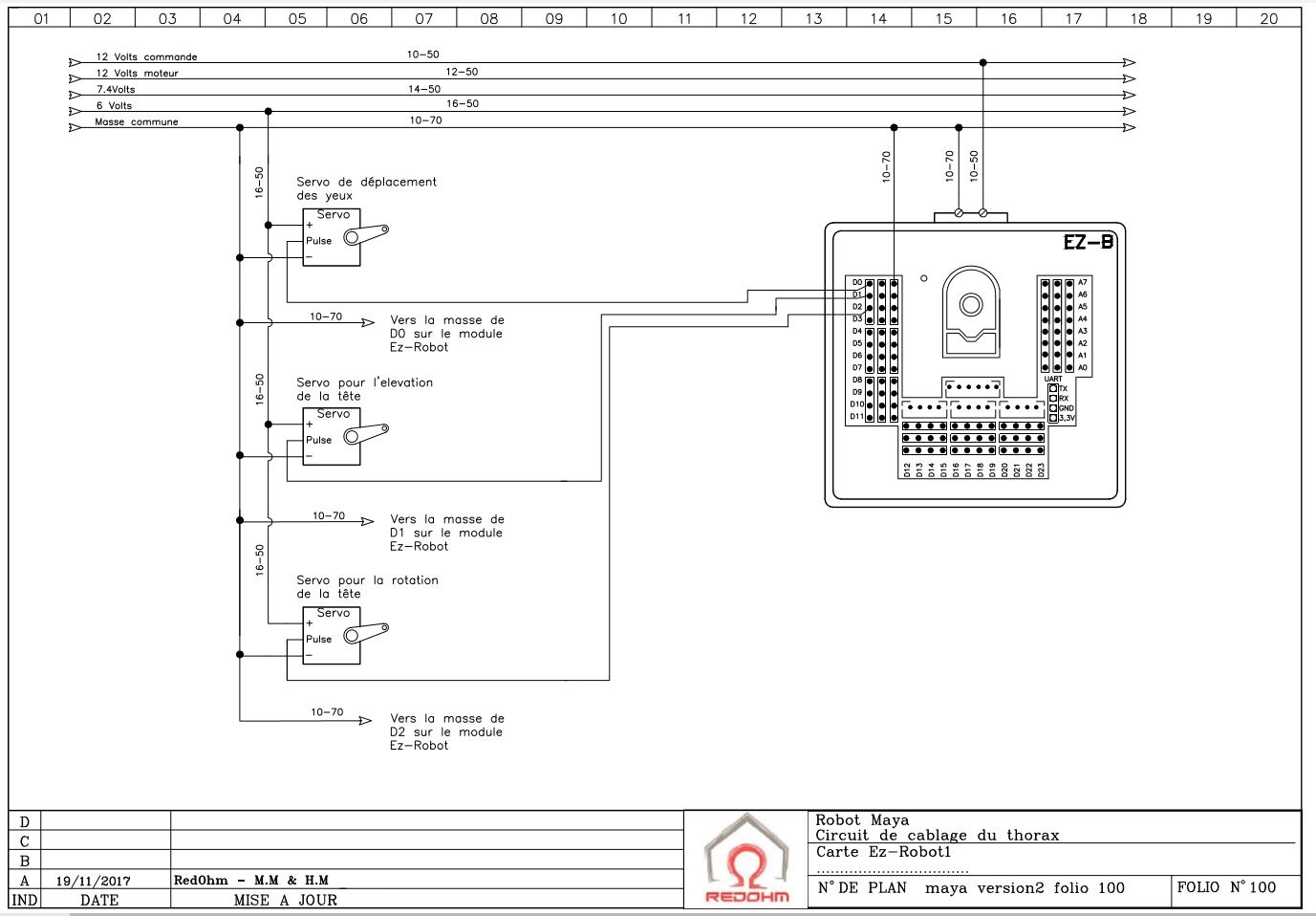
Folio 100 version 2 – Schéma du robot Maya ( Pilotage des mouvements de la tête de Maya )
| Retour au sommaire |
Folio 101 : Carte Ez-Robot1
|
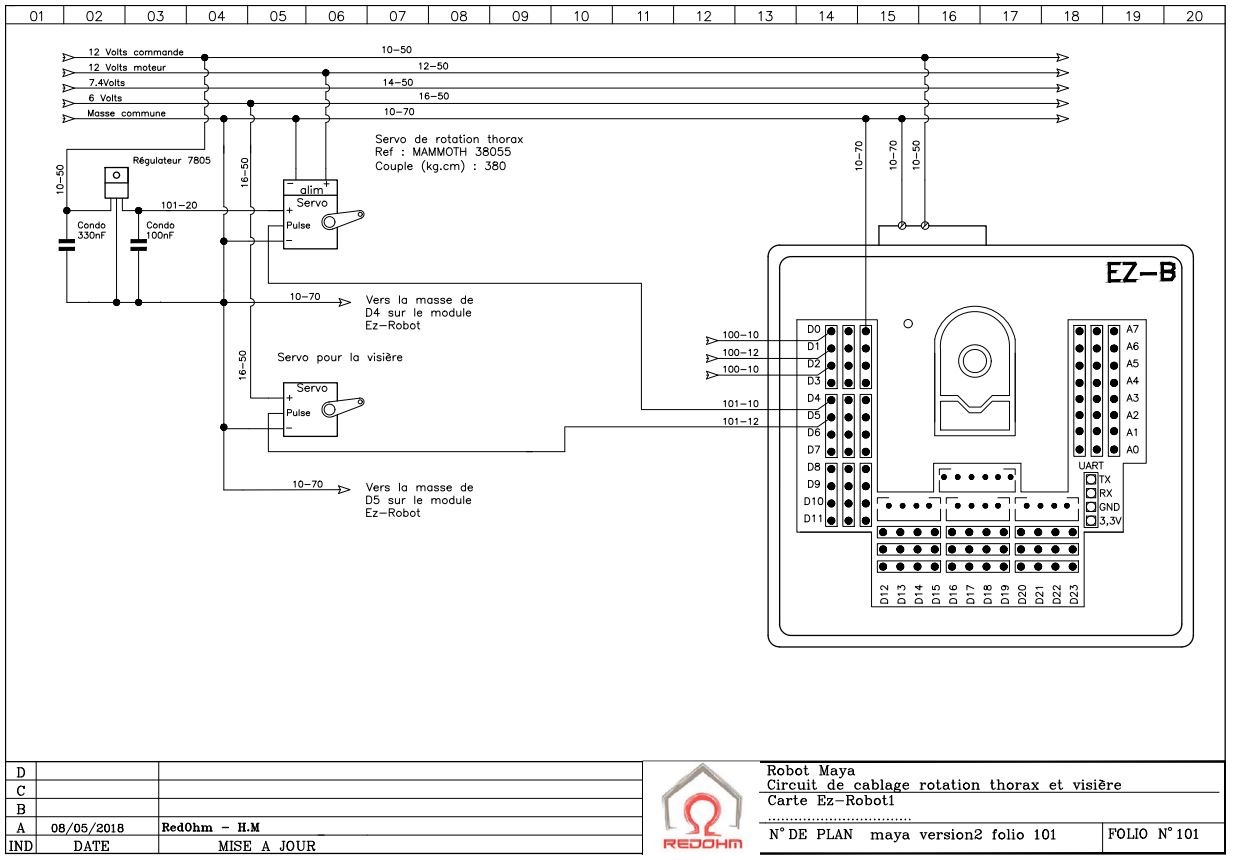
Folio 101 version 2 – Schéma du robot Maya ( Circuit de cablage rotation thorax et visiére )
| Retour au sommaire |
Folio 159 : Repérage des actionneurs de la main droite |
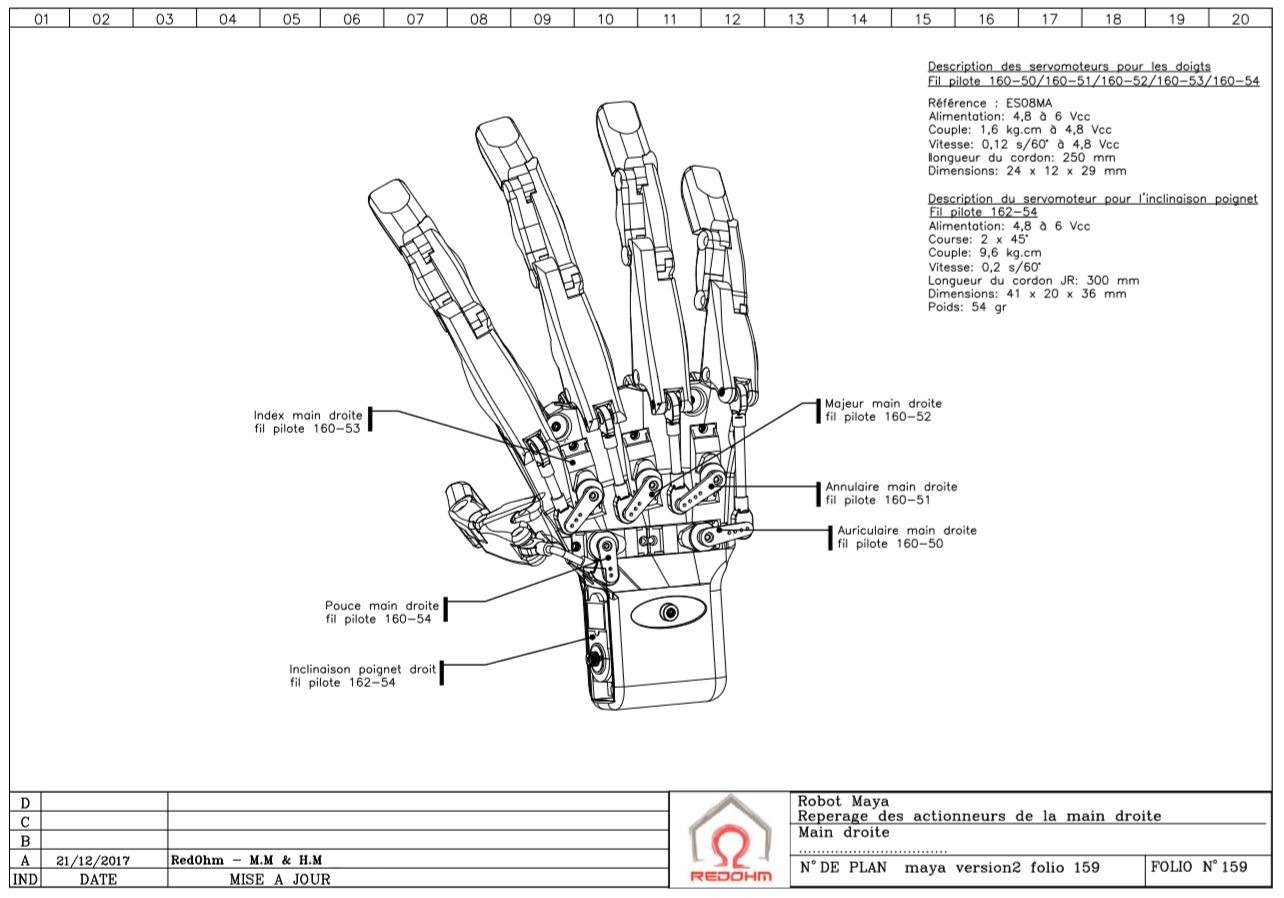
Folio 159 version 2 – Schéma du robot Maya ( Repérage des actionneurs de la main droite )
| Retour au sommaire |
Folio 160 : Carte Arduino160
|
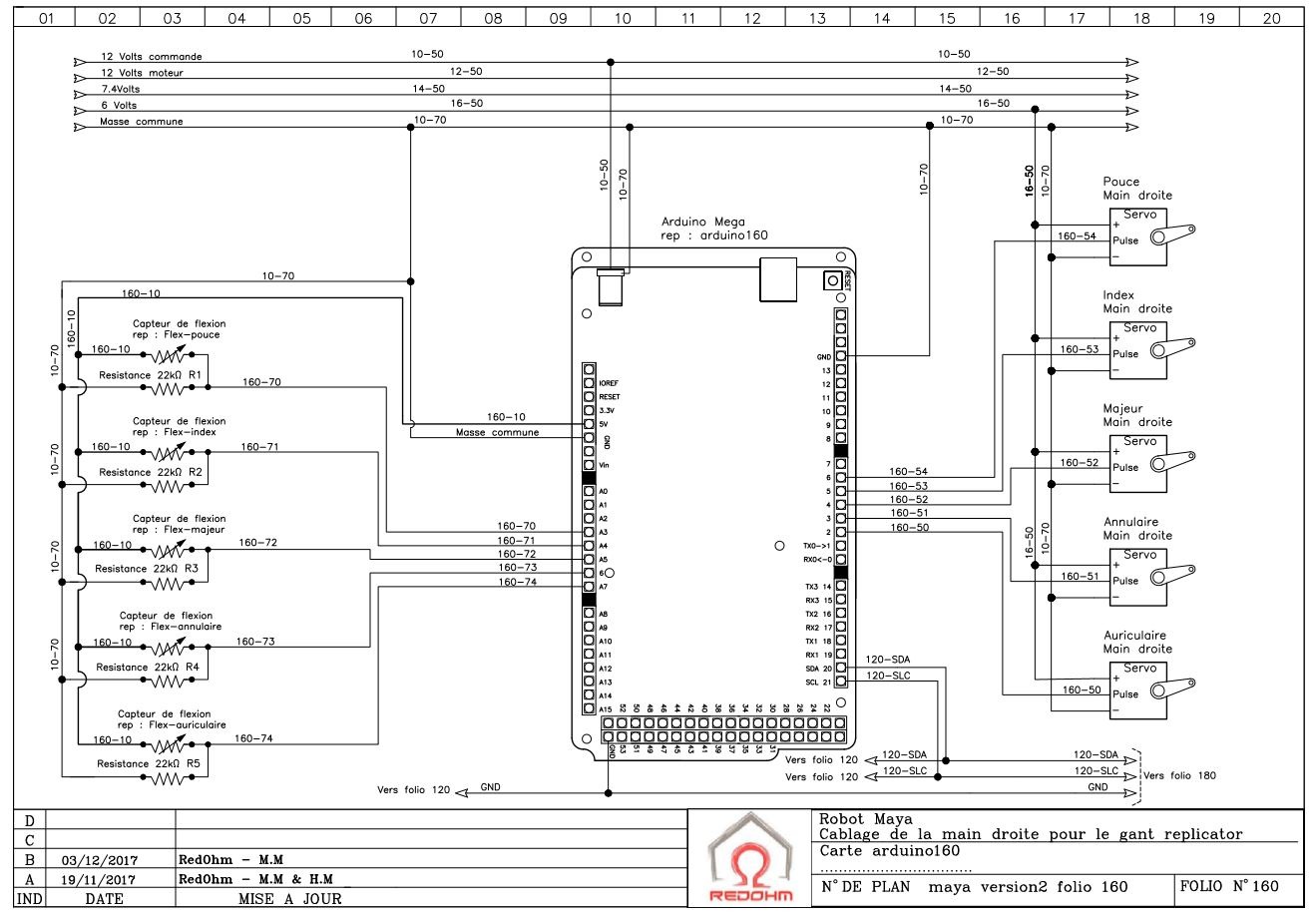
Folio 160 version 2 – Schéma du robot Maya ( câblage gant replicator main droite )
| Retour au sommaire |
Folio 162 : Carte Arduino160
|
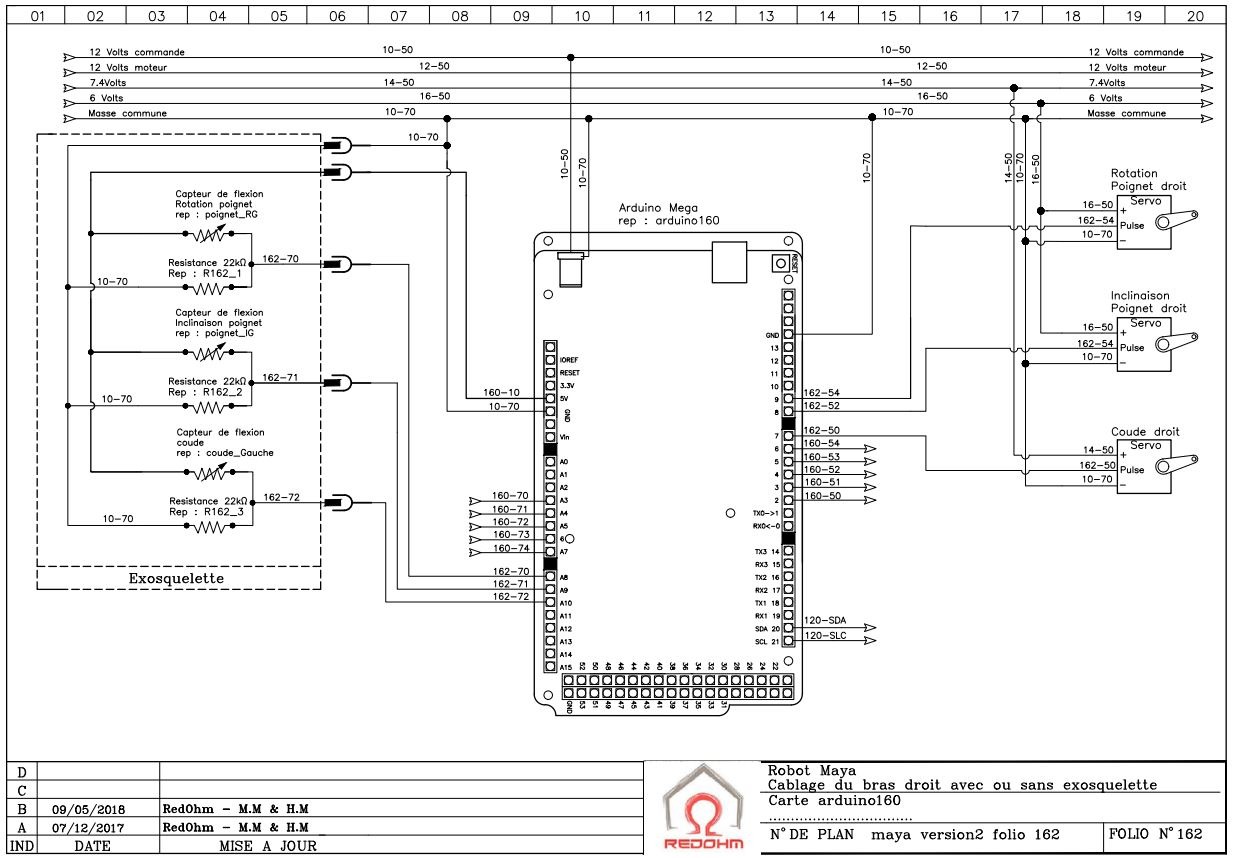
Folio 162 version 2 – Schéma du robot Maya ( câblage du bras droit 1/2 avec ou sans exosquelette )
| Retour au sommaire |
Folio 180 : Carte Arduino
|
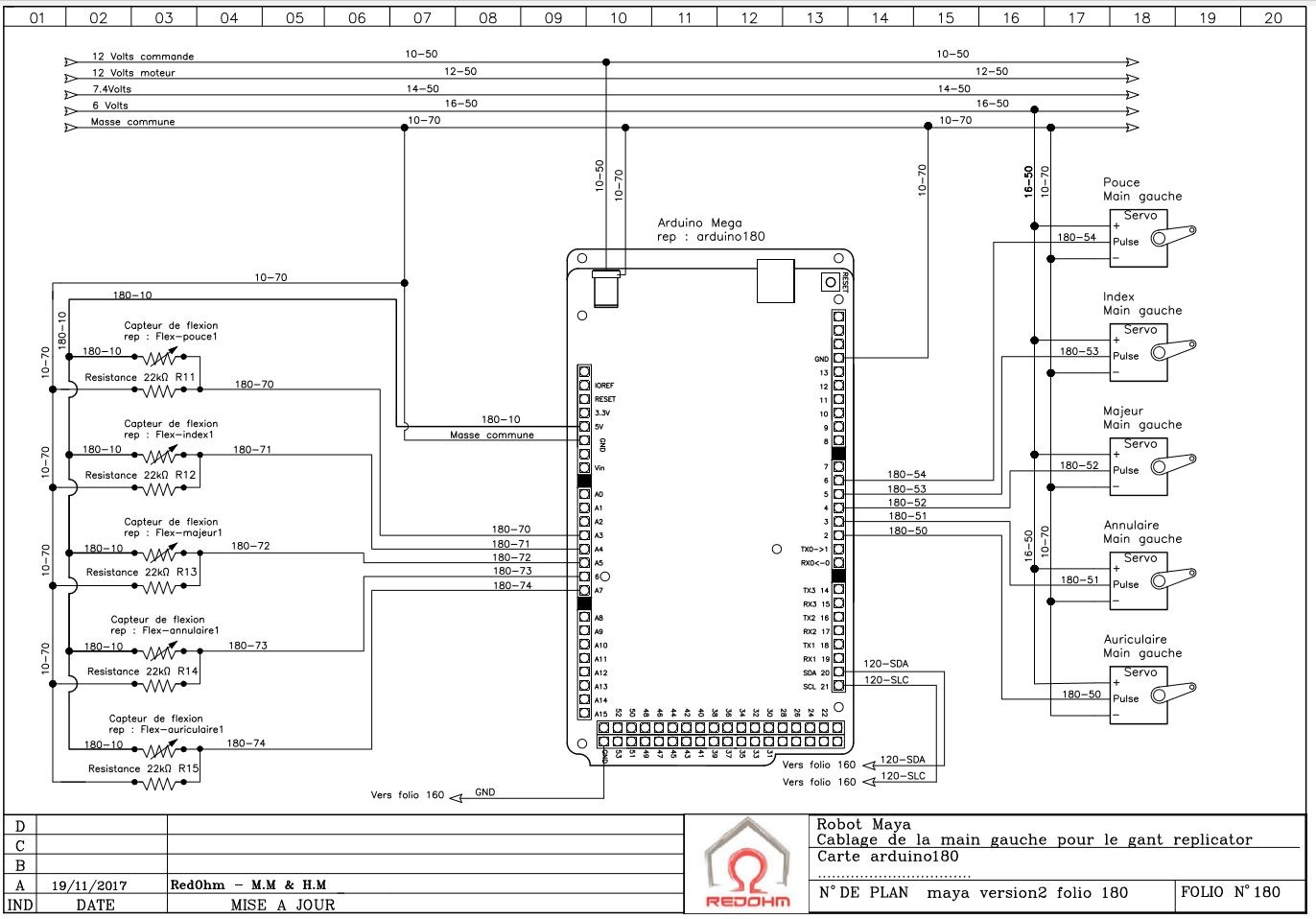
Folio 180 version 2 – Schéma du robot Maya ( câblage gant replicator main gauche )
| Retour au sommaire |
Folio 182 : Carte Arduino180
|
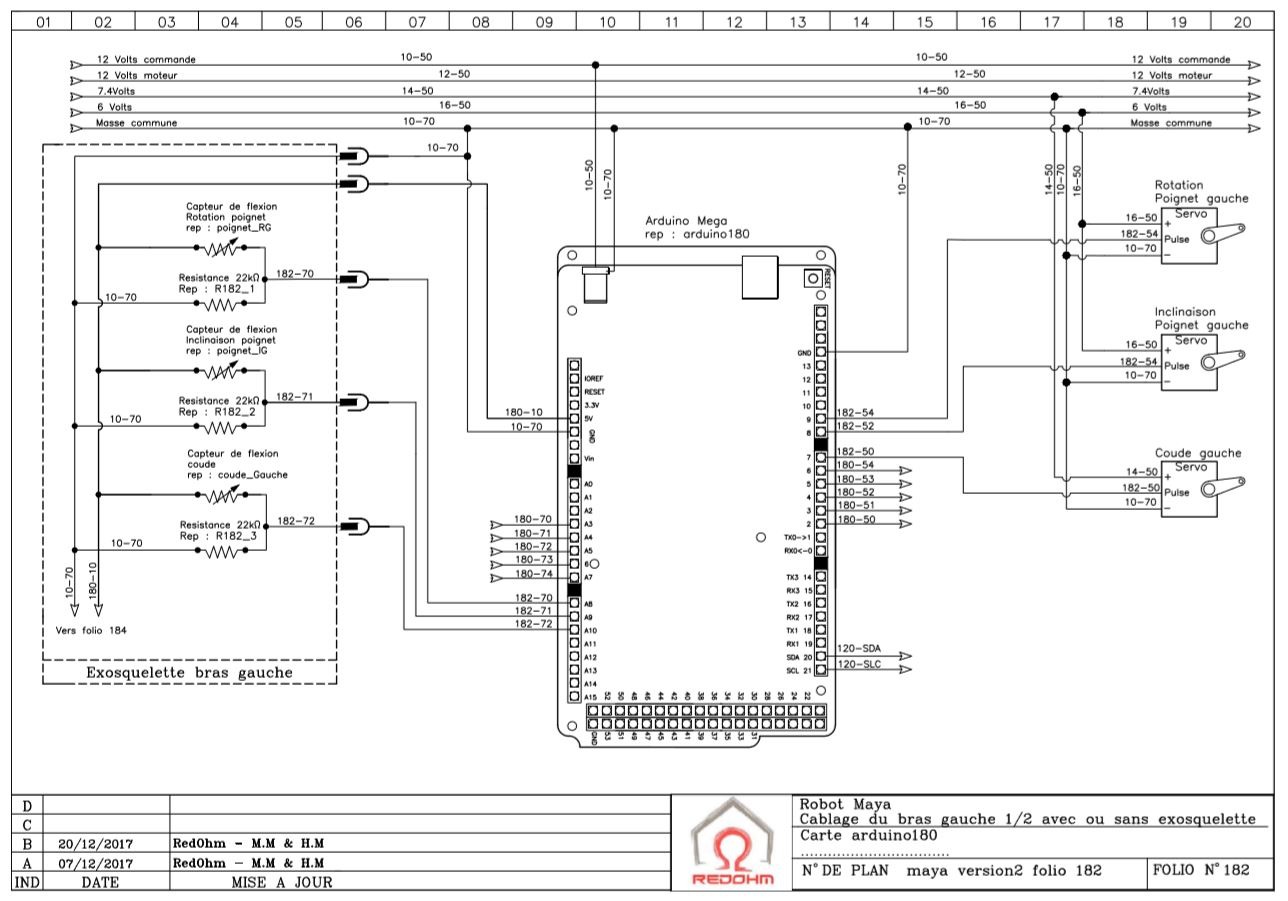
Folio 182 version 2 – Schéma du robot Maya ( câblage du bras gauche 1/2 avec ou sans exosquelette )
| Retour au sommaire |
Folio 184 : Carte Arduino180
|
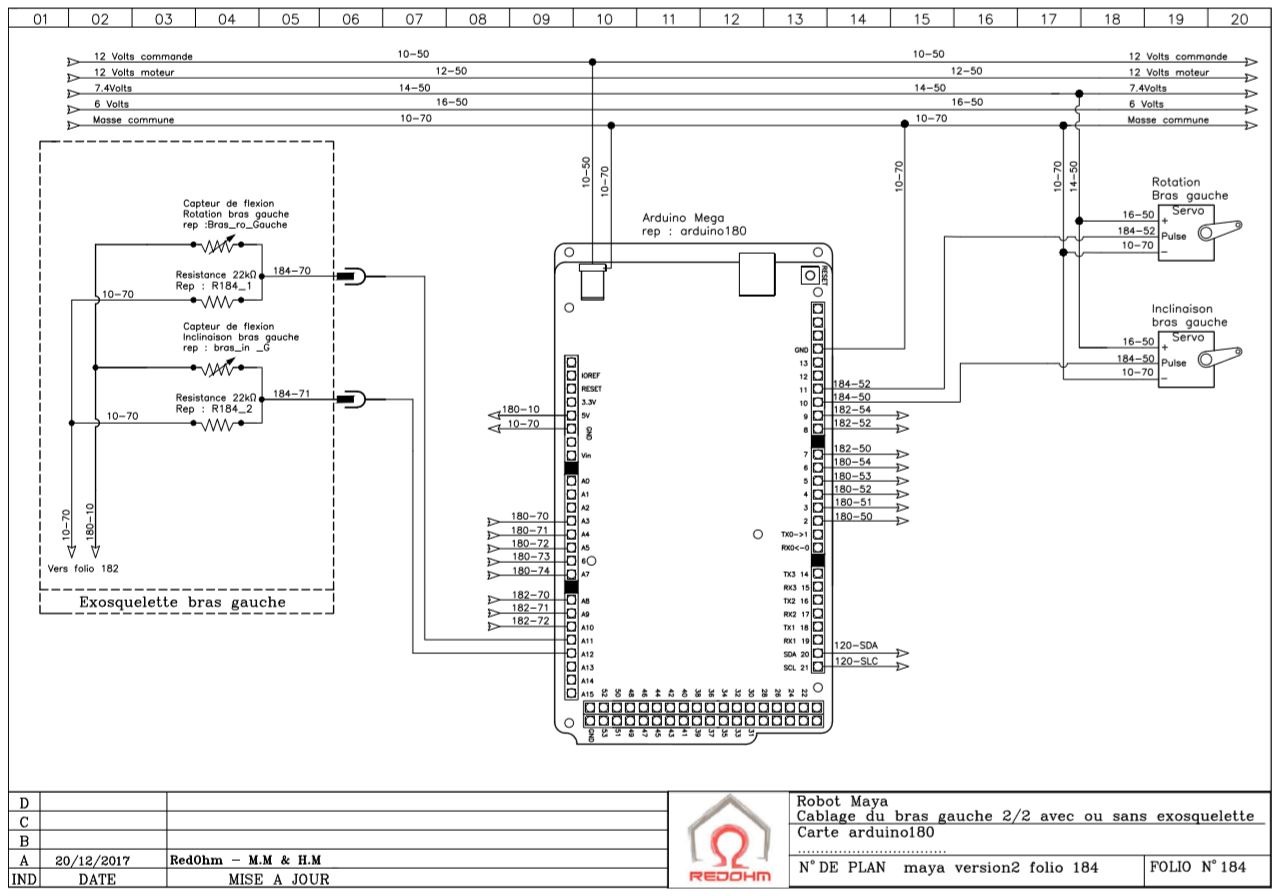
Folio 184 version 2 – Schéma du robot Maya ( cablage du bras gauche 2/2 avec ou sans exosquelette )
| Retour au sommaire |
![]()