
–
Mise à jour le 01/05/2020 : Le projet Mobi one est un petit module de reconnaissance autonome avec monitoring à distance. Il a pour but d’explorer une zone et de renvoyer des données de mesures telles que la mesure de température ambiante, détection de gaz, mesure du son…
Sommaire :
- Présentation du projet Mobi-one
- Historique la refonte du châssis pour la Version 1.00 de Mobi on
- Fichier pour l’impression 3D
- Châssis principal
- Carrosserie du robot Mobi one
- Vidéo de montage de la version de base
- Visualisation sur des différents points de montage de Mobi one
- Montage des 4 supports moteur
- Montage de la carte Arduino méga dans le châssis de Mobi one
- Montage des moteurs dans le châssis de Mobi one.
- Montage des moteurs dans le châssis ( vue des 2 moteurs )
- Matériel utile pour la construction de Mobi one
- Module de propulsion RD02
- Carte double commande MD25 2x3A
- Carte Arduino Mega
- Module Grove Mega Shield V1.2 103020027
- Matériel utiles pour la construction de Mobi-one Version SaberTooth
Présentation du projet Mobi one |
Le projet Mobi one est un petit module de reconnaissance autonome avec monitoring à distance. Il a pour but d’explorer une zone et de renvoyer des données de mesures telles que la mesure de température ambiante, détection de gaz, mesure du son… Les données renvoyées en temps réel au PC sont alors traitées et exploitées sous forme de cartographie des lieux relatant les positions et valeurs des mesures.
Pourquoi Mobi one ? C’est très simplement un clin d’œil aux célèbres films Star wars mixé avec le fait que c’est le premier mobile autonome de cette taille que nous réalisons. Donc Mobi one parce que Mobi one Kenobi 🙂
Le proof of concept
Tout D’abord, nous avons souhaité vérifier l’utilisation des différentes technologies dans leur ensemble sur un petit module réalisé simplement sur un bout de médium. Arduino, xbee, motorisation SD25, capteurs, batterie : tout y est pour réaliser nos premiers tests. Nous avons surtout voulu vérifier que la partie sans fil via les shields xbee se présentait bien en terme de réactivité. C’est chose faite, au travers d’une application et d’une tablette, nous avons pu piloter manuellement le petit module sur roue. Les ordres sont réactifs et le mobile aussi.
Voici une petite photo du module « fait maison » avant la phase de refonte du montage.
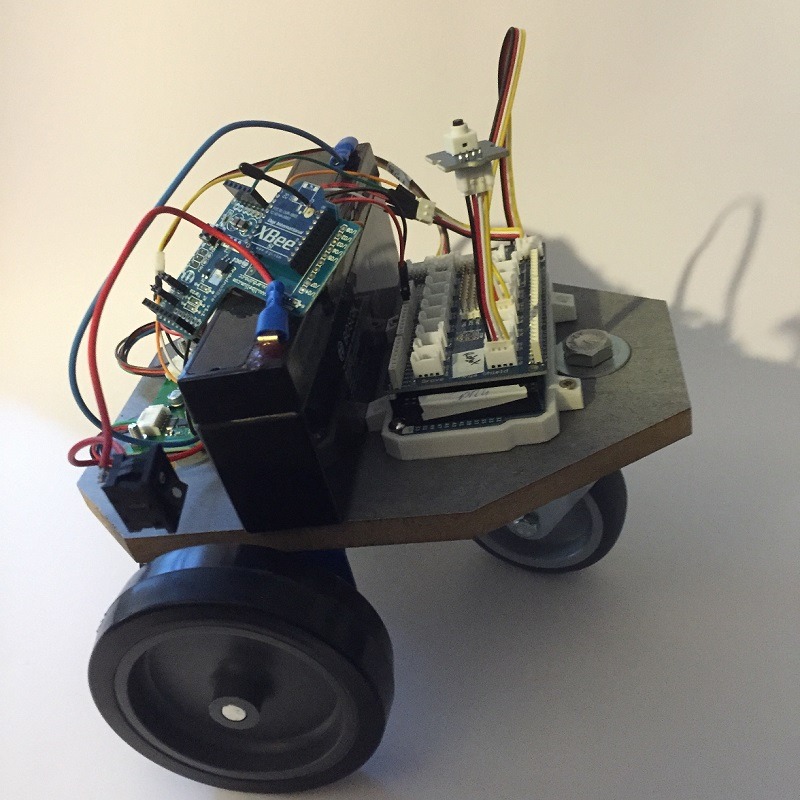
Prototype de Mobi one – ( RedOhm )
Le mobile est composé des éléments suivants:
Un Arduino Méga pour piloter toute l’électronique.
Ensemble de propulsion complet pour robot comprenant
- 1 module de commande de moteurs MD25 et deux codeurs pour récupérer le nombre de tours et de son électronique.
- 2 motoréducteurs EMG30
- 2 supports de montage pour EMG30
- 2 roues WH100 de 100 mm de diamètre
Un shield xbee permettant de communiquer à distance.
Plusieurs capteurs : distance, son, température, gaz, lumiere…
Une batterie 12v.
Une roue libre.
.
Retour au sommaire
Historique la refonte du châssis pour la Version 1.00 de Mobi on |
Version 1.00 de Mobi one
Retour au sommaire
Fichier pour l’impression 3D de Mobi one |
Châssis principal robot Mobi one |
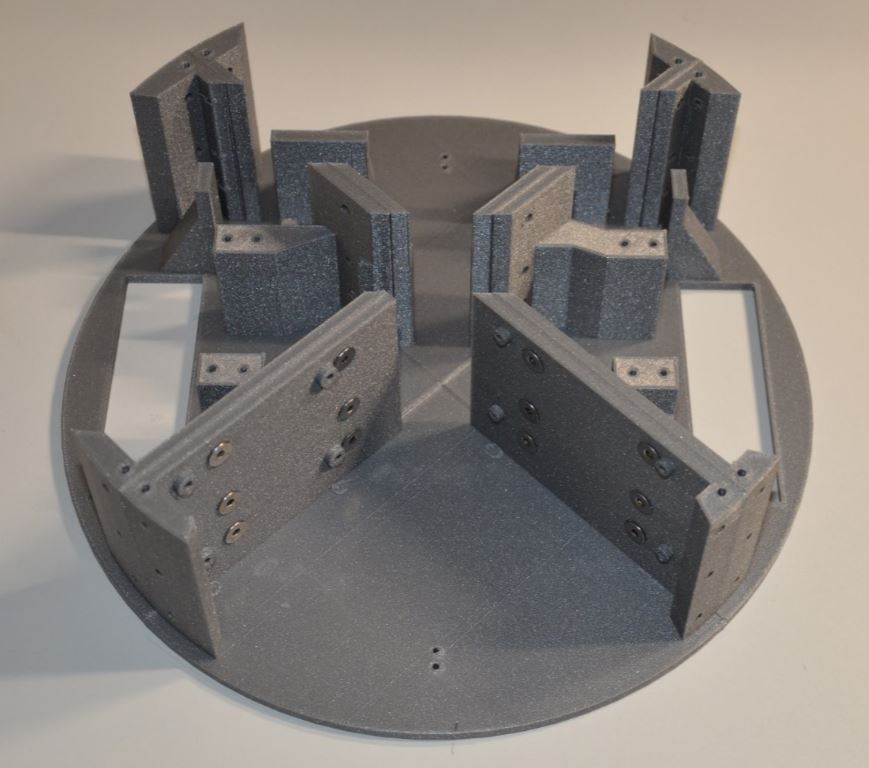 Carter principal Mobi one – RedOhm |
| Fichier : comprenant les pièces 001/002/003/004 |
| Retour au sommaire |
Carrosserie du robot Mobi one |
 Carrosserie du robot Mobi one . RedOhm |
| Fichier : comprenant les pièces 100/200/300/400 |
.
Retour au sommaire
Capot de Mobi one – RedOhm |
 Capot de Mobi one – RedOhm |
| Fichier : comprenant les pièces 20/21/22/23 |
| en cours |
![]()
Vidéo de montage du robo Mobi one |
![]()
Visualisation sur des différents points de montages |
–
Montage des 4 supports moteurs .
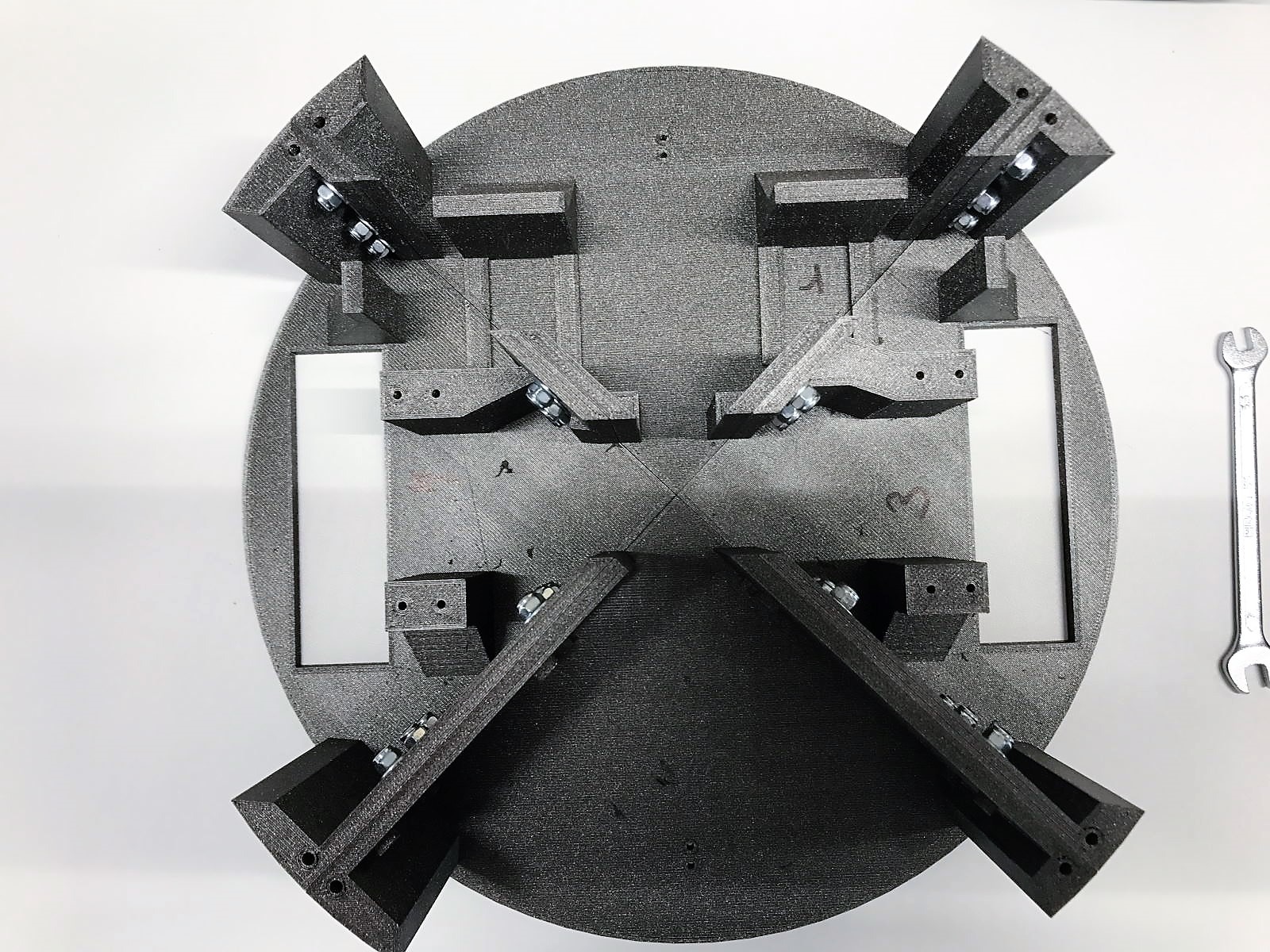
Montage des 4 supports moteurs
–
Montage de la carte Arduino méga dans le châssis de Mobi one .
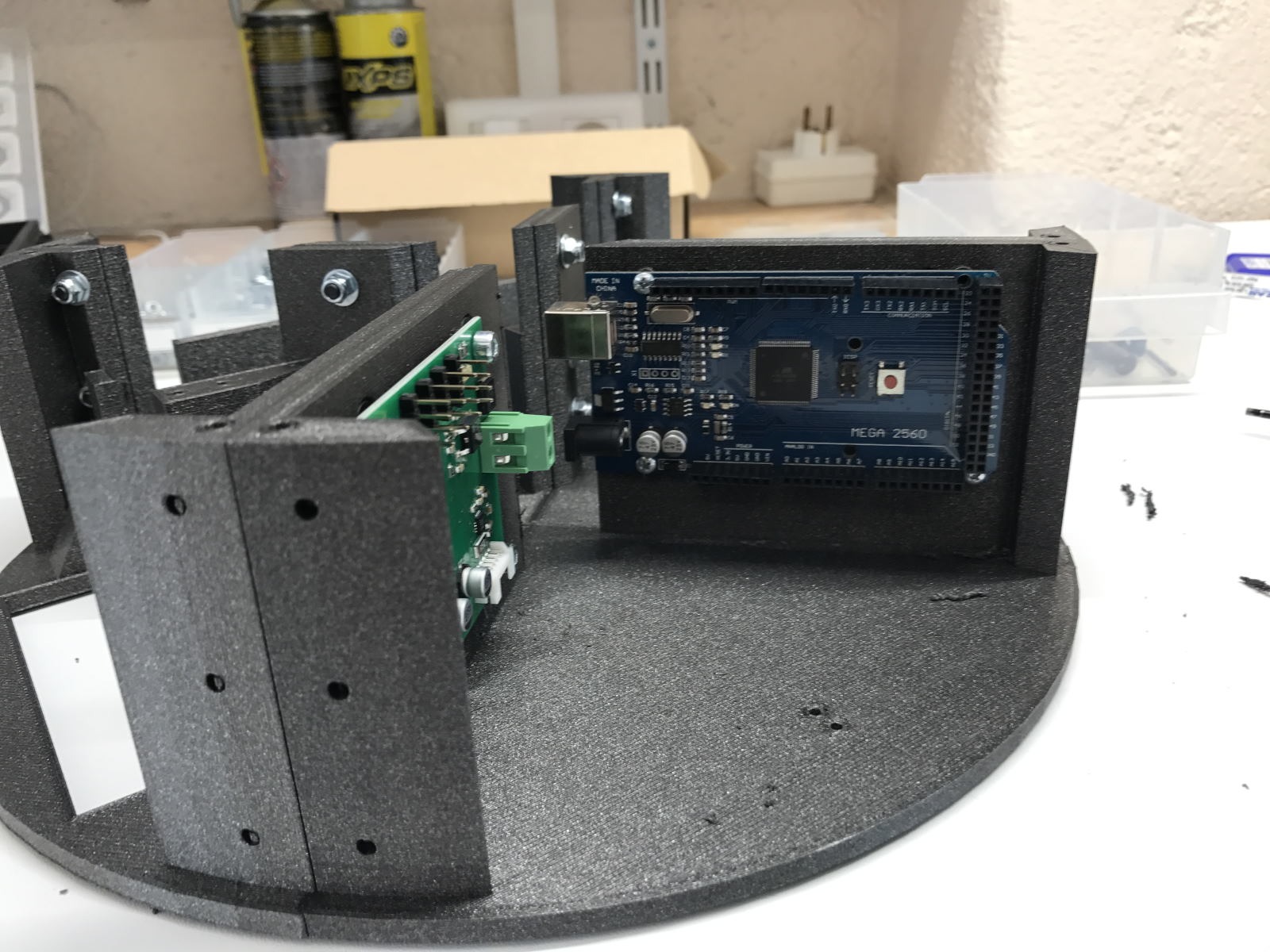
Montage de la carte Arduino méga dans le châssis de Mobi one
–
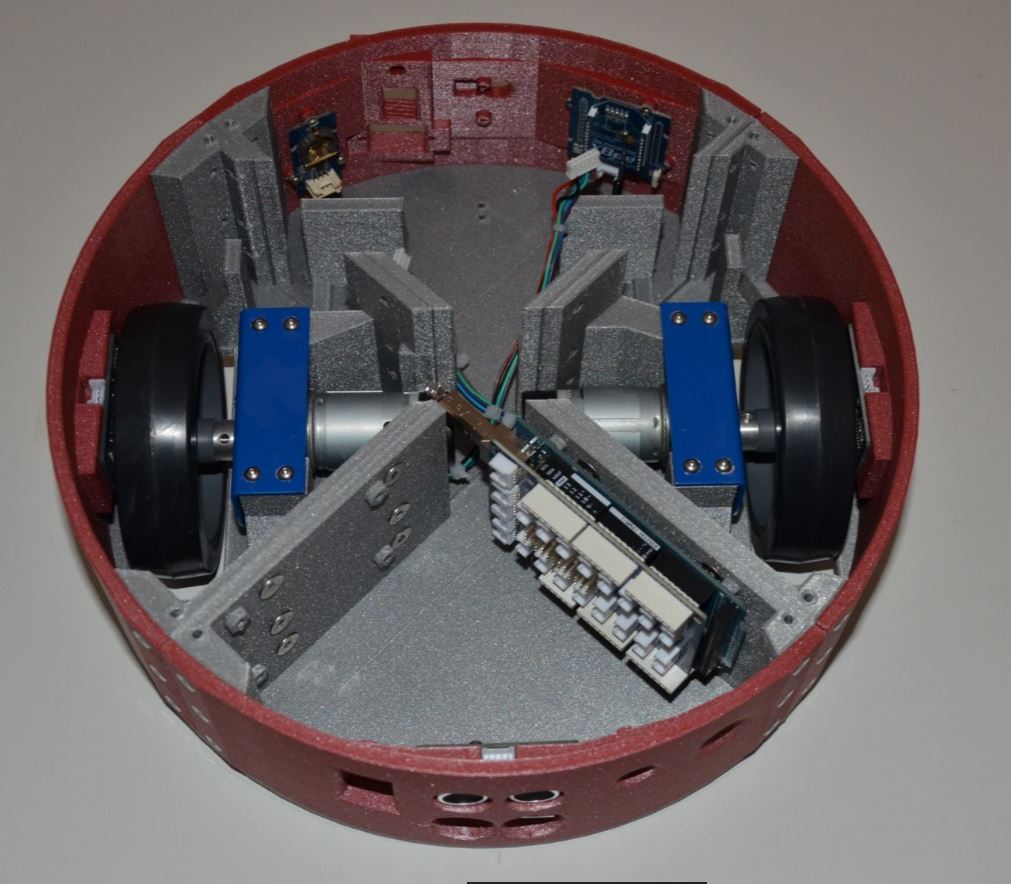
Montage des moteurs dans le châssis de Mobi one
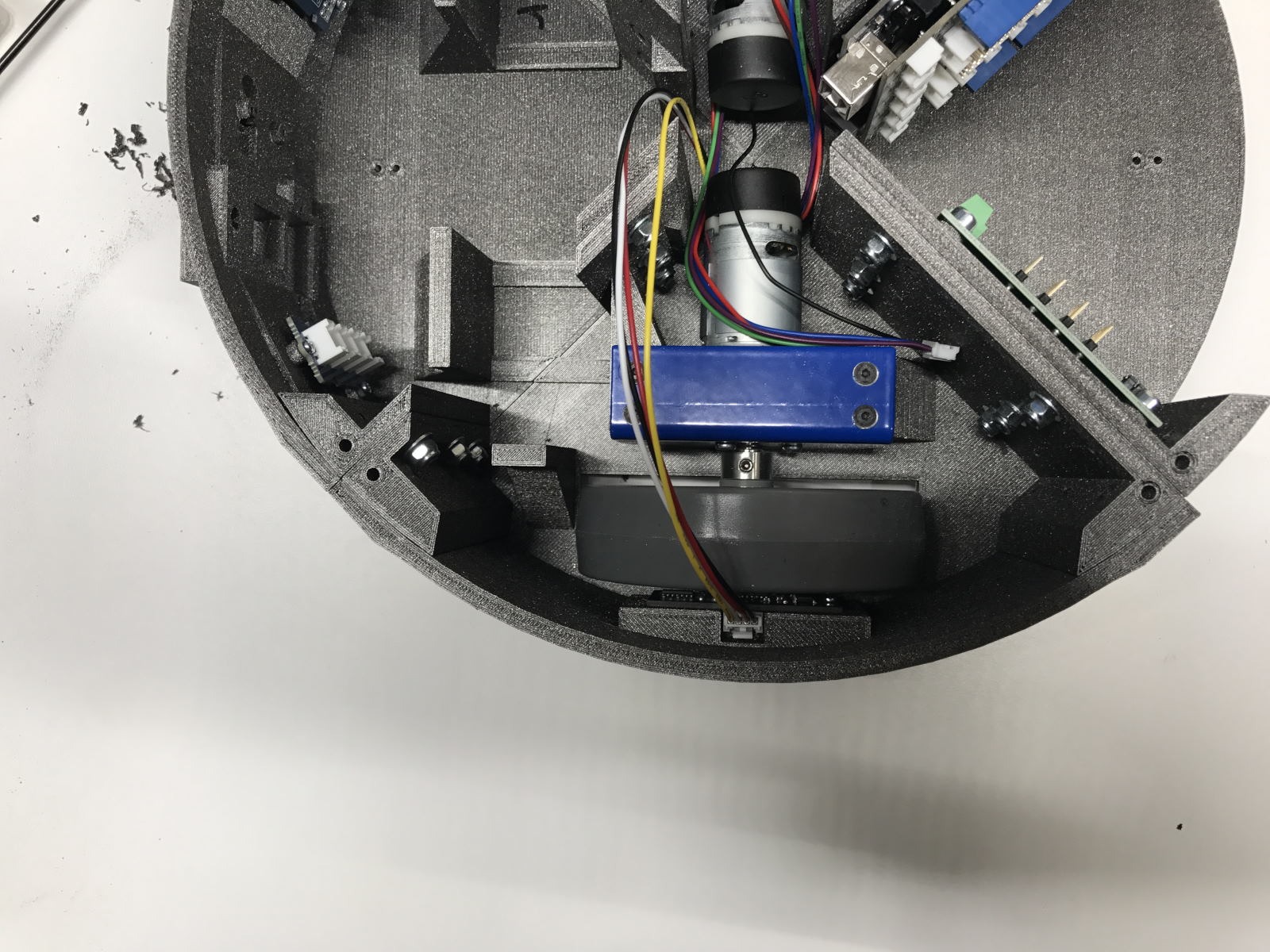
Montage des moteurs dans le châssis de Mobi one
–
Montage des moteurs dans le châssis de Mobi one ( vue des 2 moteurs )
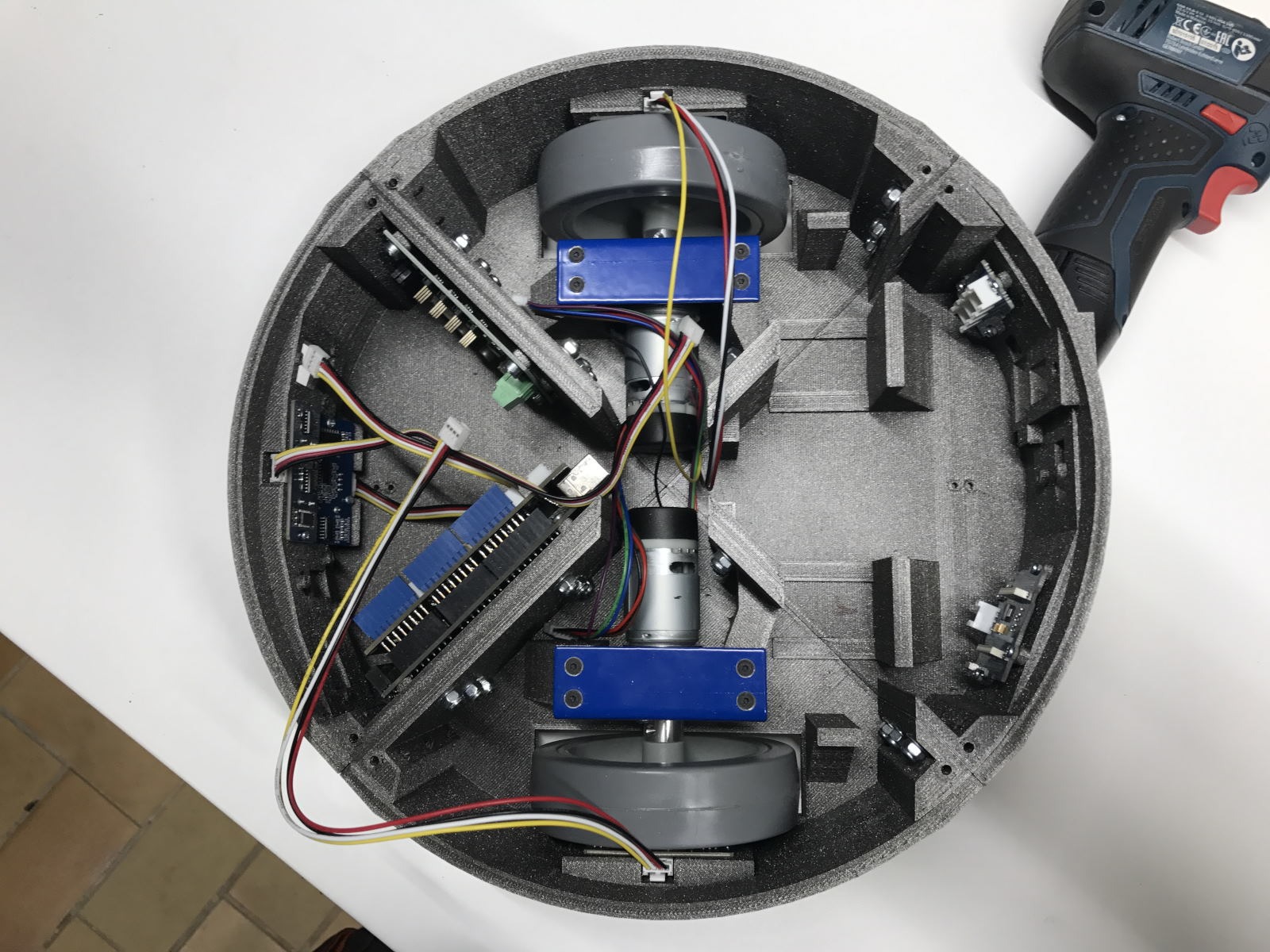
Montage des moteurs dans le châssis de Mobi one ( vue des 2 moteurs )
![]()
Matériel utiles pour la construction de Mobi-one
|
Module de propulsion RD02

Module de propulsion RD02 pour Mobi one
Ensemble de propulsion complet pour robot comprenant
– 1 module de commande de moteurs MD25
– 2 motoréducteurs EMG30
– 2 supports de montage pour EMG30
– 2 roues WH100 de 100 mm de diamètre et la visserie.
Il suffit d’une batterie de 12 Vcc pouvant délivrer 6 A pour alimenter le système.
L’alimentation de la partie électronique provient d’un régulateur 5 Vcc intégré au module MD25.
Ce régulateur délivre 300 mA pour l’alimentation d’autres circuits électroniques éventuels.
Fournisseur : Gotronic
Double commande MD25 2x3A

Double commande MD25 2x3A pilotage des moteurs de Mobi one – RedOhm
Description du module MD25
Le module MD25 est une double commande de moteurs à courant continu, prévue pour piloter les moteurs EMG30 et le kit RD02.
Ce pilote de moteur est caractérisé par deux modes de fonctionnement, le contrôle individuel direct des moteurs ou la capacité à envoyer des commandes de vitesse et de tour. Un régulateur embarqué, de 300 mA est disponible pour vos circuits. Le courant peut atteindre 2,8 A pour chaque moteur. L’encodeur en quadrature est alimenté par la carte.
- Pilotage des deux moteurs séparément ou commande de vitesse et de direction.
- Module en double pont en H.Alimentation: 12 Vcc (régulateur 5 Vcc intégré délivrant 300 mA).
- Consommation: jusqu’à 3 A pour chaque moteur.
- Pilotage du module par bus I²C (jusque 8 modules MD25 adressables).
- Lecture des encodeurs des moteurs pour déterminer la distance parcourue et la direction.
- Lecture du courant des moteurs dans un registre.
- Régulation de puissance.
- Accélération réglable.
- Dimensions: 70 x 60 x 25 mm
- Fabricant: Devantech
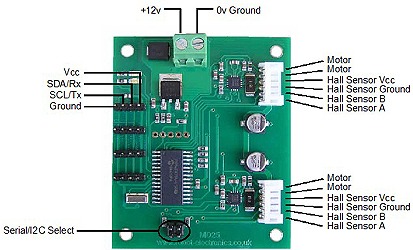
Carte md25 les connections pour le pilotage de Mobi one – RedOhm
Fournisseur :
Gotronic -> Code article : 24594
Lextronic -> Code article : MD25
RobotShop -> Code article : RB-Dev-31
| Retour au sommaire |
Carte Arduino MEGA 2560
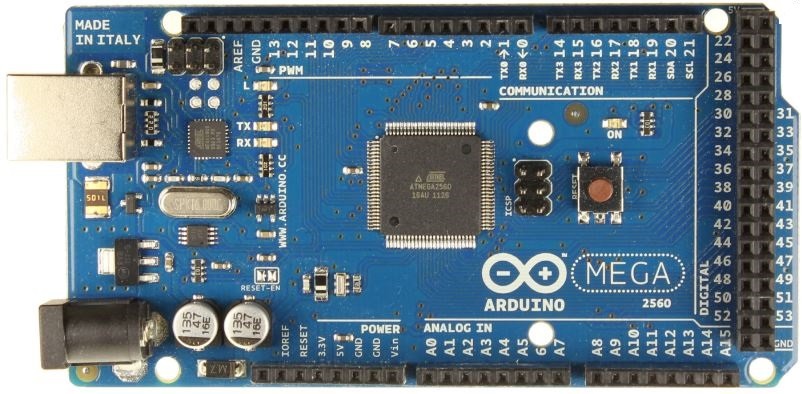
Carte Arduino Mega pour le pilotage Mobi one – RedOhm
La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs. Elle est idéale pour des applications exigeant des caractéristiques plus complètes que la Uno. Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires.
Elle peut se programmer avec le logiciel Arduino. Le contrôleur ATMega2560 contient un bootloader qui permet de modifier le programme sans passer par un programmateur. Le logiciel est téléchargeable gratuitement.
Descriptif de la carte Arduino Mega
- Version : Rev. 3
- Alimentation : via port USB ou 7 à 12 V sur connecteur alim
- Microprocesseur : ATMega2560
- Cadencement : 16 MHz
- Mémoire flash : 256 kB
- Mémoire SRAM : 8 kB
- Mémoire EEPROM : 4 kB
- Connecteur :
- 54 broches d’E/S dont 14 PWM
- 16 entrées analogiques 10 bits
- A savoir : intensité par E/S: 40 mA
- Dimensions : 107 x 53 x 15 mm
Pour les néophytes sur Arduino ci-dessous des tutoriel et des liens technique :
- Programmation :
- Documentation technique
Fournisseur :
Gotronic / Lextronic / RobotShop
| Retour au sommaire |
Module Grove Mega Shield V1.2 103020027
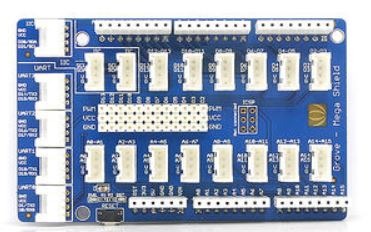
Module Grove Mega Shield V1.2 103020027 – RedOhm
Le module Grove Mega Shield de Seeedstudio est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega. Il est compatible notamment avec les cartes Arduino Mega et Google ADK.
Cette carte peut être divisée en 4 sections: le bouton de reset, la connectique d’alimentation, la partie digitale et la partie analogique. Elle est équipée de connecteurs 4 broches pour les entrées analogiques, les entrées-sorties logiques, les interfaces I2C et UART.
Descriptif de la carte Module Grove Mega Shield V1.2 103020027
- Version : V1.2
- Led : indicateur de reset
- Reset : via un bouton-poussoir
- Connecteurs : 22 x 4 broches
- Dimensions : 93 x 57 x 20 mm
- Référence fabricant : 103020027 (remplace 101020024 et SLD90147P)
| Retour au sommaire |
![]()
Matériel utiles pour la construction de Mobi-one
|
La carte SaberTooth 2x12A est idéale pour les commandes différentielles de robots, les tanks, voitures et bateaux, etc. Elle convient pour des poids de 45 kg
La commande des deux moteurs peut se faire à l’aide d’une tension analogique, d’un signal RC ou d’un signal série.
La carte SaberTooth possède des modes indépendants pour la vitesse et la direction, facilitant la commande différentielle. Lors de chaque ralentissement ou changement de sens de rotation du moteur, la carte SaberTooth recharge la batterie, permettant une autonomie accrue du robot.
Elle autorise les brusques changements de direction et les arrêts rapides. Une sortie 5 Vcc est disponible pour alimenter un microcontroleur ou un récepteur RC.
Descriptif de la carte SaberTooth 2x12A
- Alimentation : 6 à 24 Vcc (NiCd, NiMh, Lithium, accu au plomb).
- A savoir : Cette carte ne peut pas être alimentée par une alimentation secteur.
- Courant de sortie :
– 2 x 12 A en continu (2 x 15 A en pointe) jusqu’à 18 Vcc
– 2 x 8 A en continu/2 x 12 A en continu avec radiateur supplémentaire (2 x 15 A en pointe) de 18 à 24 Vcc - Signal de commande :
- Tension analogique 0 à 5 Vcc (Sabertooth 2×12)
- Signal radio RC (Sabertooth 2 x 12 et 2 x 12 R/C)
- Liaison série (Sabertooth 2 x 12).
- Indication de statut : par Leds
Protection thermique et contre les surcharges
Dimensions: 59 x 75 x 17 mm
Poids: 60 gr (34 gr pour la carte R/C)
Fabricant: Dimension Engineering
en cours de réalisation le 08/04/2018
![]()