.
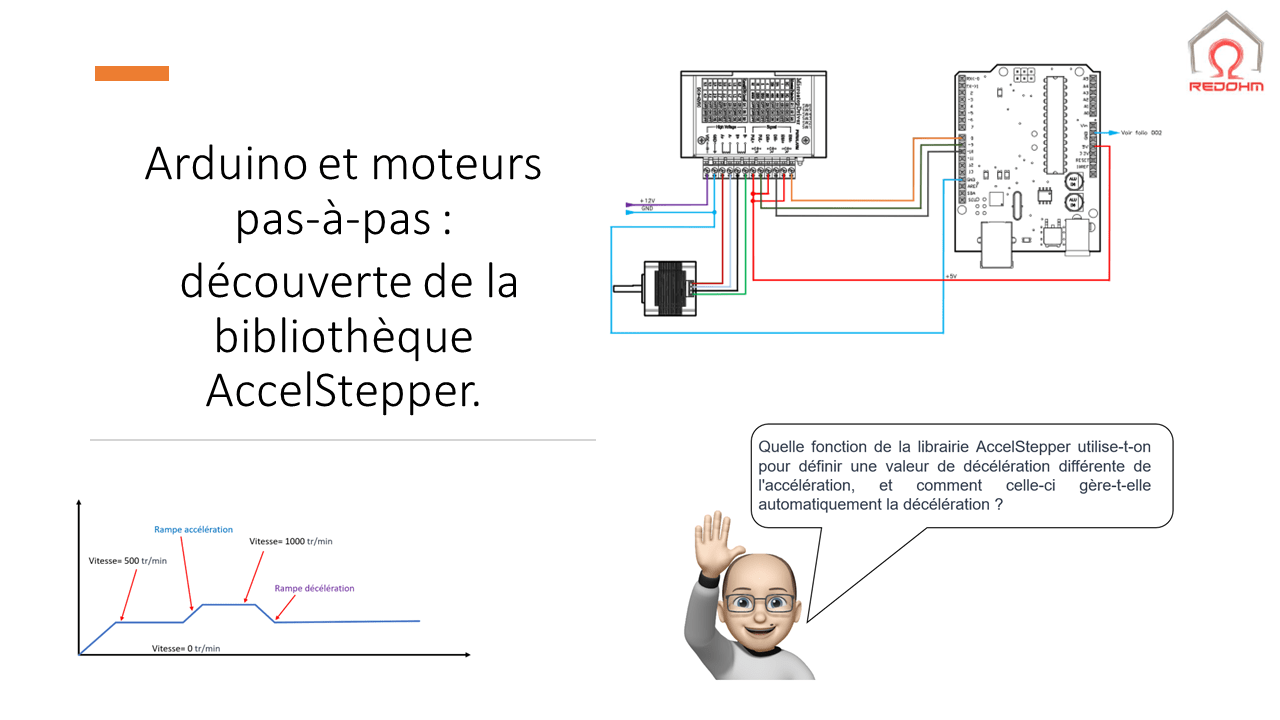
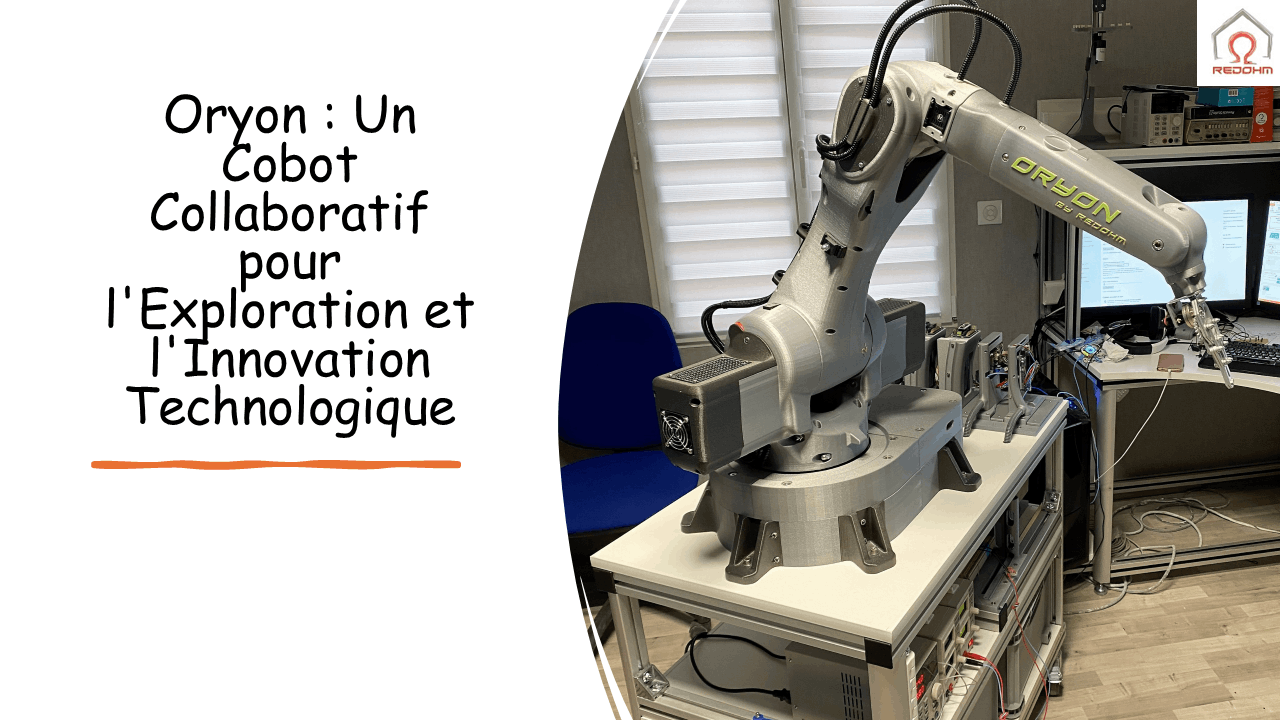
Le projet Oryon est né d’une volonté d’exploration et d’apprentissage, afin de nous ouvrir à de nouvelles technologies et d’approfondir nos compétences en mécanique, impression 3D et électronique. Ce bras manipulateur collaboratif (Cobot) représente un défi technique et conceptuel qui devrait, à terme, nous permettre de concevoir des ensembles plus complexes. En intégrant des moteurs pas à pas de grande puissance et des pièces mécaniques soumises à des contraintes dimensionnelles rigoureuses, nous visons à franchir un cap dans nos réalisations.
Présentation et Objectifs
Oryon sera installé sur une plateforme de 500 mm x 500 mm ou circulaire, dont la taille pourra être ajustée en fonction des calculs de charge et du centre de gravité. Afin de garantir son autonomie, il sera alimenté par des batteries, dont le poids contribuera également à améliorer la stabilité du système.
Ce Cobot disposera de six degrés de liberté et sera capable de porter une charge minimale de 1 kg, avec une capacité d’évolution vers des charges plus importantes. Son déplacement dans l’espace sera assuré par des capteurs ultrasoniques et des capteurs Lidar, permettant un positionnement précis et une interaction optimisée avec son environnement.
Système de Vision
Le Cobot sera équipé de deux caméras, dont les rôles seront définis en concertation avec l’équipe en charge du projet. Ce système vidéo pourra être utilisé pour la reconnaissance d’objets, l’assistance à la prise de décision, ou encore pour le suivi des opérations en temps réel.
Impression 3D et Conception Mécanique
Un des axes majeurs de ce projet réside dans la maîtrise avancée de l’impression 3D de pièces complexes. Nous devrons affiner notre savoir-faire, tant dans la conception que dans le choix des matériaux. Afin d’assurer une accessibilité maximale, les pièces volumineuses seront conçues de manière modulaire afin de permettre leur impression sur des machines de différentes tailles. La plus grande taille retenue est 280 mm x 280 mm, tandis que la taille la plus modeste envisagée est de 200 mm x 140 mm.
Sécurité et Approche Normative
En tant que robot collaboratif, Oryon sera conçu en respectant les normes de sécurité industrielles définies par :
- EN ISO 10218-1 et EN ISO 10218-2 : recommandations pour la prévention intrinsèque et les mesures de protection des robots industriels.
- ISO/TS 15066 : spécifications pour le travail en interaction directe avec un humain.
L’intégration de ces directives constitue un axe pédagogique fort, nous permettant d’acquérir une expertise dans la conception de robots collaboratifs en toute sécurité.
Sur cette page, vous pouvez télécharger différentes versions du cobot Oryon, accompagnées de leur fiche technique détaillée.
![]()
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celles qui vous intéressent .