Dans cette vidéo, nous explorons des fonctionnalités avancées de la bibliothèque AccelStepper pour Arduino, en mettant l’accent sur la fonction stepper.setMaxSpeed(). Cette fonction est essentielle pour contrôler avec précision la vitesse d’un moteur pas-à-pas. Nous expliquons comment elle permet d’ajuster dynamiquement la vitesse maximale du moteur, offrant ainsi un contrôle fin et réactif, adapté à une multitude d’applications.
Sommaire :
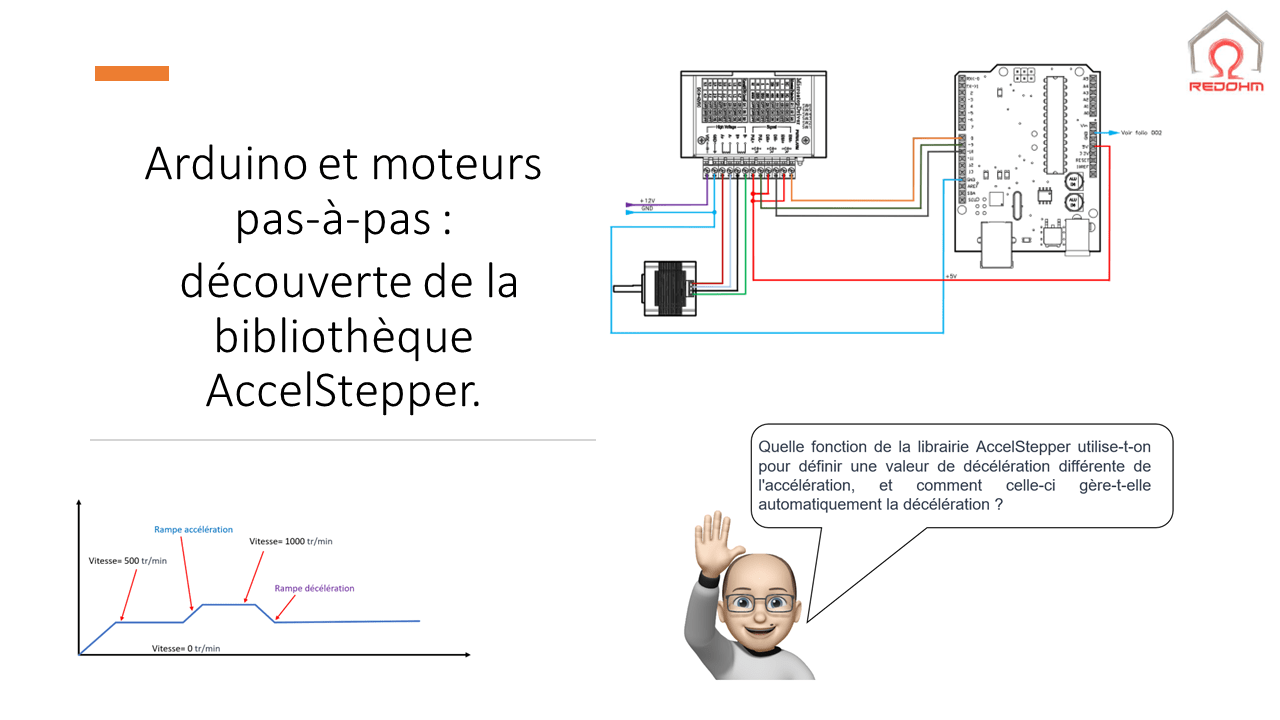
- Présentation de la vidéo
- Quels détails techniques caractérisent la méthode stepper.setMaxSpeed dans Arduino ?
- Pouvez-vous résumer comment intégrer stepper.setMaxSpeed dans un programme Arduino pour contrôler un moteur pas-à-pas ?
- Quel paramètre faut-il fournir à stepper.setMaxSpeed et comment est-il mesuré ?
- Votre tutoriel
Vous apprendrez que, bien que setMaxSpeed() définisse la vitesse cible, la vitesse réelle peut être influencée par d’autres facteurs, tels que la charge du moteur et la tension d’alimentation. De plus, nous explorerons l’interaction entre setMaxSpeed() et setAcceleration(), montrant comment ces deux fonctions travaillent de concert pour assurer un démarrage et un arrêt en douceur du moteur, évitant ainsi les saccades et garantissant un mouvement fluide.
Ce contrôle précis de la vitesse est particulièrement crucial dans des domaines tels que la robotique de précision, les imprimantes 3D et les équipements automatisés, où la régularité du mouvement influence directement la qualité du résultat.
En lien avec le code fourni, nous démontrerons comment la vitesse du moteur est ajustée en temps réel via un potentiomètre, offrant un contrôle interactif et adaptable, crucial pour des applications nécessitant une réponse rapide et précise. Cette vidéo est une ressource pour tous ceux qui cherchent à comprendre et à maîtriser le contrôle des moteurs pas-à-pas dans leurs projets de robotique et d’automatisation.
.
Quels détails techniques caractérisent la méthode stepper.setMaxSpeed dans Arduino ?
La méthode stepper.setMaxSpeed dans Arduino définit la vitesse maximale du moteur pas-à-pas en pas par seconde. Les développeurs l’utilisent pour un contrôle précis de la vitesse, crucial dans des applications comme les imprimantes 3D. La vitesse doit correspondre aux capacités du moteur. Une vitesse trop élevée risque de provoquer des sauts de pas. Le pilote de moteur influe aussi sur la vitesse maximale. On appelle généralement cette méthode en début de programme ou avant un mouvement spécifique. Elle fonctionne bien avec stepper.setAcceleration et stepper.moveTo.
↩️
.
Pouvez-vous résumer comment intégrer stepper.setMaxSpeed dans un programme Arduino pour contrôler un moteur pas-à-pas ?
Incluez la bibliothèque AccelStepper. Initialisez ensuite le moteur avec AccelStepper stepper. Définissez la vitesse maximale avec stepper.setMaxSpeed(valeur). Utilisez stepper.run() pour activer le mouvement. Adaptez la vitesse selon le projet.
↩️
Quel paramètre faut-il fournir à stepper.setMaxSpeed et comment est-il mesuré ?
Pour la méthode stepper.setMaxSpeed, le paramètre nécessaire est la vitesse maximale du moteur. Cette vitesse est mesurée en ‘pas par seconde’ (pps), une unité indiquant combien de pas individuels le moteur peut faire en une seconde. La valeur doit être un nombre positif, adaptée aux spécifications techniques du moteur pour assurer un fonctionnement optimal et sécurisé.
↩️
![]()
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celles qui vous intéressent .