***
Ce tutoriel vous montre le montage du mécanisme de vision ainsi que la mise en place de système de rotation et d’articulation du cou

Ce tutoriel vous montre le montage du mécanisme de vision ainsi que la mise en place de système de rotation et d’articulation du cou
Mise à jour le 28/06/2019 : Voici donc l’étude et les fichiers pour l’impression 3D de la main de Sentinel, celle-ci a été choisi sur le thème du « Terminator » . Les doigts fonctionnent avec cinq servomoteurs. L’ensemble des fichiers est disponible pour les mains droite. Dans la rubrique rotation poignée, vous trouverez l’adaptation entre la main et la partie de Sentinel ou éventuellement avec un robot de votre fabrication. Continuer la lecture
Mise à jour le 12/04/2015
Après plusieurs essais de construction de main trouvée sur Internet et le peu de résultat satisfaisant , notre groupe a décidé de s’engager sur la construction d’une main 100 % Redohm . Nous ne voulions pas que la main de notre robot ressemble trop à une main humaine mais plutôt à celle d’un robot à l’aspect mécanique un peu dans le style de celle du Terminator.Voici donc un ensemble de photos de la main de Sentinel avec ses servomoteurs montés .Nous avons déjà sorti l’ensemble des pièces sur l’imprimante 3D . Evidemment les fichiers seront disponibles sur notre site
Mise à jour le 14/06/2015




















![]()
Mise à jour le 24/02/2015
![]()
Mise à jour le 24/05/2015
Voici l’étude du capotage du thorax de Sentinel, celui-ci abritera les différentes cartes électroniques qui piloteront la rotation de la tête des bras ainsi que différents capteurs .
***
Mise à jour le 11/02/2015
RedOhm palonnier Imnoov
 Imprimez vos pièces en 3D suivant votre finition désirée, en fonction de votre choix vous aurez plus ou moins de travail à fournir.
Imprimez vos pièces en 3D suivant votre finition désirée, en fonction de votre choix vous aurez plus ou moins de travail à fournir.
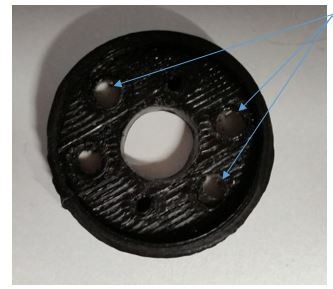
Une fois la pièce imprimée, il vous faudra enlever le surplus de matière dans les trous prévus aux écrous ainsi qu’à la rainure destinée à recevoir la corde (tendons)
Le fichier à télécharger pour l’imprimante 3D est disponible ci-dessous
Si toutefois vous voulez modifier quand même cette pièce, nous vous joignons le fichier compatible SolidWorks version 2014 .Le fichier à télécharger est disponible ci-dessous .

Il faudra aussi utiliser un foret de 8 mm pour agrandir le trou central
Perçage
Pour un centrage plus facile des vis de fixation, je vous conseille de repercer les trous des écrous avec un foret de 3mm
Utiliser un foret de 2 mm pour nettoyer l’intérieur du trou traversant situé ici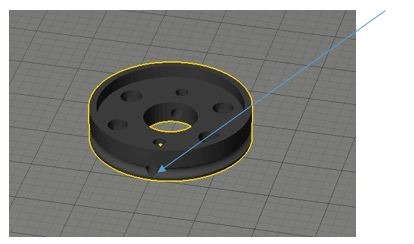
Ce conduit sert au passage du fil (tendons)
La prochaine étape consiste à mettre en place les écrous M3. Il vous faut pour cela un fer à souder pouvant atteindre 300°C et procéder de la manière suivante :
1 – Allumez le fer à souder
2 – Mettre l’écrou au bout de celui-ci

3 – attendre 5/10 secondes que l’écrou chauffe et ainsi faciliter l’insertion
4 – Alignez l’écrou et la pièce, appuyer légèrement pour que l’écrou rentre très facilement, mais surtout, alignez-le pour faciliter et garder la vis droite.
5 – Répétez l’opération pour les trois autres écrous .
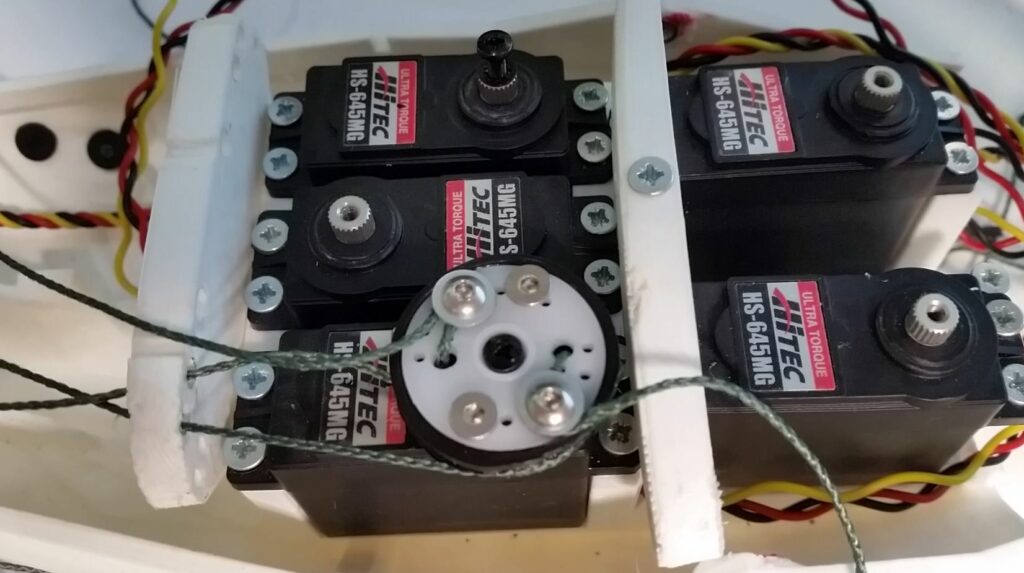
Passons aux palonniers du servomoteur Hitec HS-645MG. Il vous faudra l’insérer de manière à ce qu’il ne dépasse plus à l’intérieur.

Il faut insérer le palonnier blanc sur le palonnier noir de votre fabrication, visser l’ensemble en prenant soin d’agrandir les trous de fixations ( essayer de tomber sur ceux existants ). Allez-y doucement, il ne faut pas transpercer la pièce noire, il s’agit juste de percer la pièce blanche.

Voilà le résultat avec les vis mise en place. Repercez aussi le trou passe fil sans toutefois transpercer la pièce, percez juste la pièce blanche, utiliser un foret de 3mm


Mettre les fils en place, regarder la photo n° 18. Procédez de cette manière

Photo n°18

Et pour le serrage, procédez comme sur la photo
Il vous suffit ensuite de serrer la vis pour bloquer votre réglage et ainsi dire adieu aux longues minutes passées à défaire les nœuds.
La mise en place sur le servomoteur se fait à l’aide de la vis de celui-ci, ne la serrez pas au maximum , elle risque de bloquer votre servomoteur.

![]()
Nous vous présentons l’album photos du montage des yeux et du cou de Sentinel avec intégration dans la tête .L’ensemble a été imprimé sur une Replicator 2 en filament PLA de 1.75 mm a 216 degrés de chez Verbatim, ces photos font ressortir la facilité d’assemblage de la boite crânienne , du mécanisme des yeux ainsi que l’assemblage du cou et support cou .Soit une notice de montage de 70 photos .
Outillage nécessaire
Temps de montage nécessaire : 1h30
Dossier technique pour l’impression 3d ci-dessous
![]()




















![]()
***
Mise à jour du 18/01/2015
Nous vous présentons 4 vidéo en 3D du montage de la tête , du cou et de l’articulation de Sentinel .
Etape 1 : Montage du cou
Etape 2 : Montage du cou dans le corps de cou
Etape 3 : Montage de l’ensemble de la tête avec vue sur le servomoteur
Etape 4 : Montage de l’ensemble tête , cou et articulation
![]()