***
RedOhm Maya le 26/11/2016
Mise à jour le 29/01/2016
Sommaire :
- Expression des yeux de Maya
- 10-10-2016 Assemblage des yeux et de la bouche de Maya ( Diaporama )
- 22-10-2016 avancement de la tète de Maya . ( Diaporama )
- 22-10-2016 Une petite vidéo pour découvrir l’ensemble des pièces qui composent la tête (Vidéo)
- 26-10-2016 Impression 3d des premières pièces du robot Maya ( Diaporama )
- 27/10/2016 Montage de la partie inférieure du visage ( Diaporama )
- 29/10/2016 Modifications du robot Maya avec la pose du cou ( Diaporama )
- 02/11/2016 Impression des pièces .Version 2.00
- 17/11/2016 Vidéo de l’ensemble tête , thorax, épaule ( Vidéo )
- 20/11/2016 Premiers essais du robot Maya 5 ( Vidéo )
- 26/11/2016 Etude du montage des épaule sur le thorax ( Diaporama et vidéo )
- 03/12/2016 Montage du thorax , du cou , de la tête et essai de l’ensemble ( vidéo )
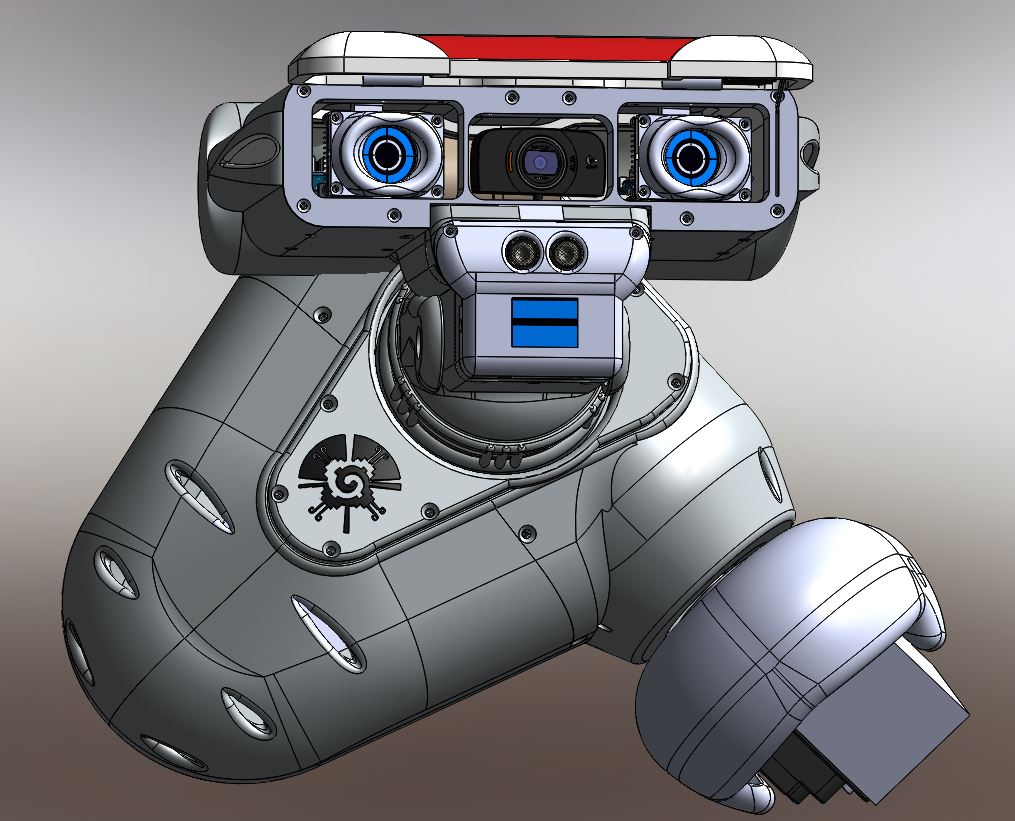
- 10/12/2016 Mise au point du système de vision pour la partie mécanique ( vidéo )
- 18/01/2017 Modification de l’encéphale ( photos )
- 29/01/2017 Etude du bras ( Photos )
| Retour au menu principal |
Expression des yeux de Maya |
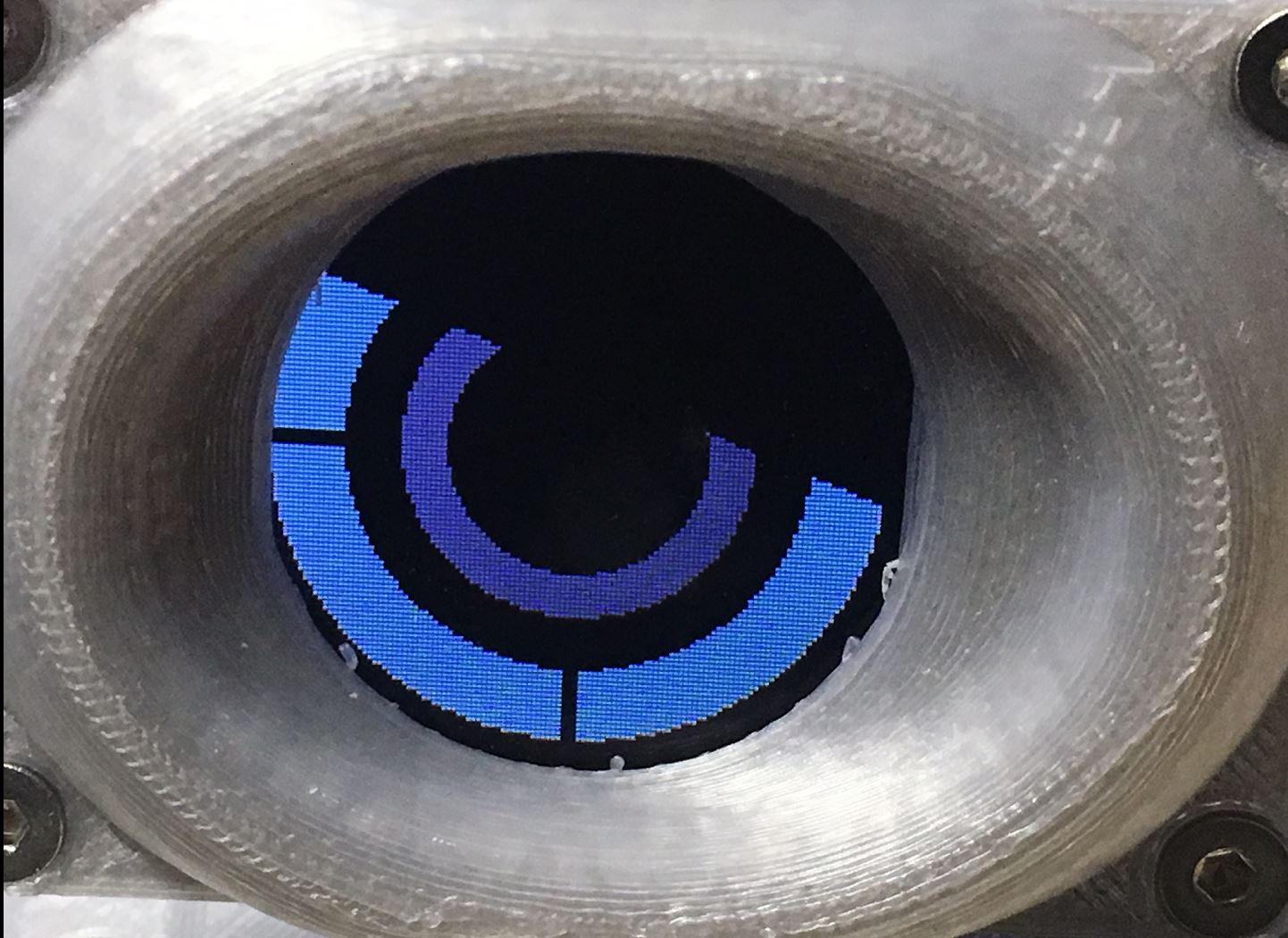
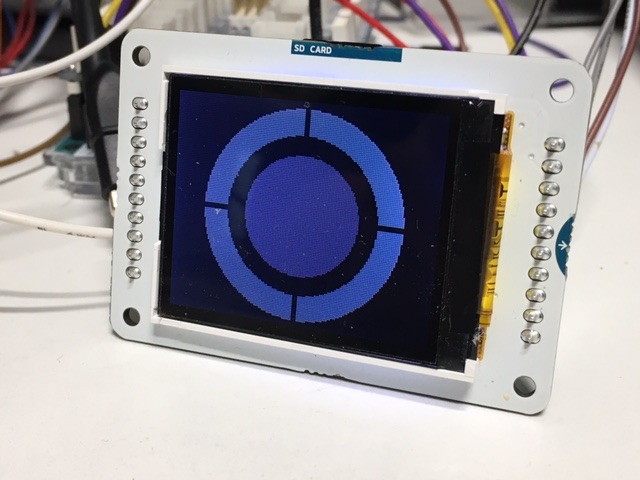
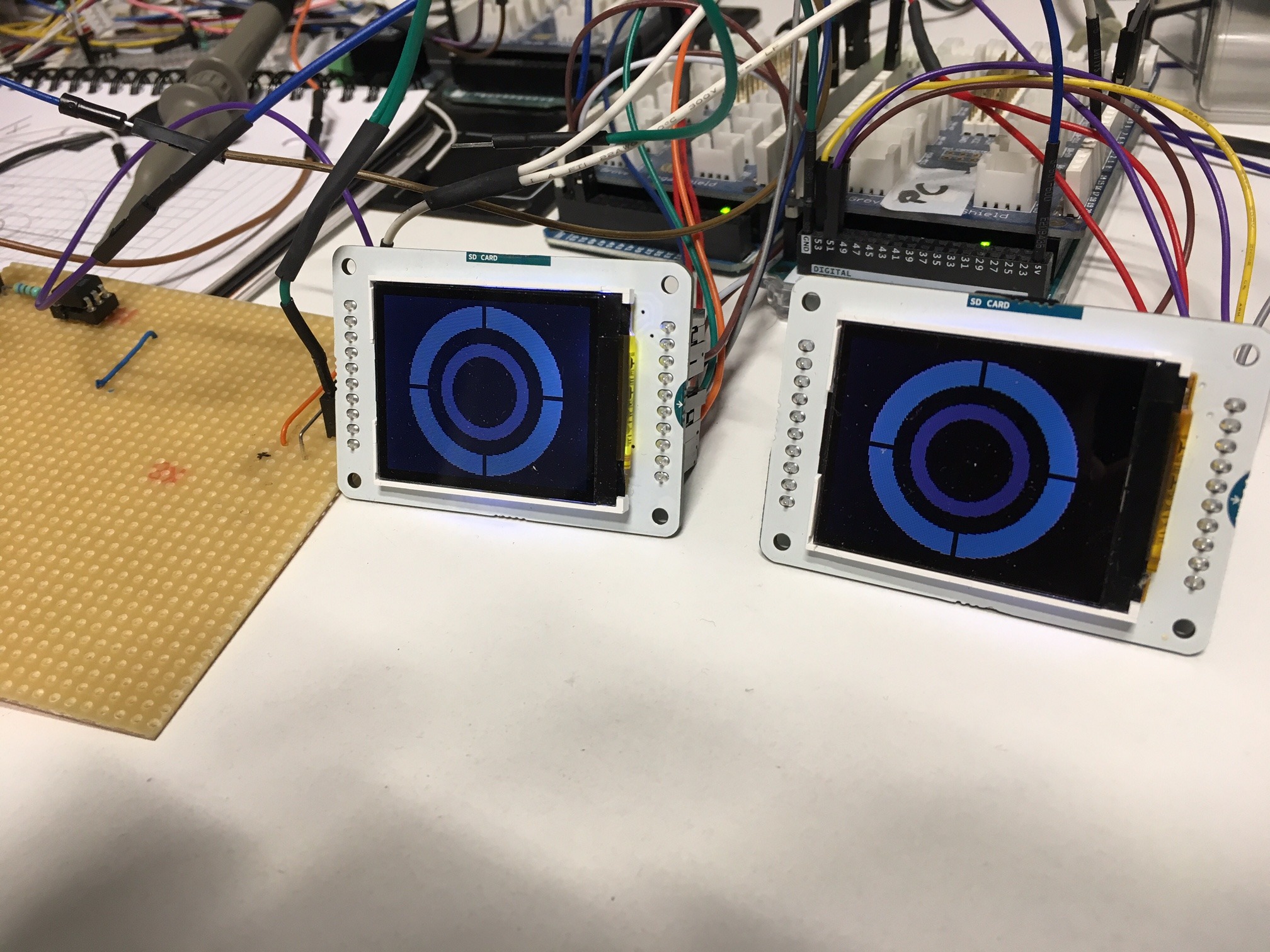
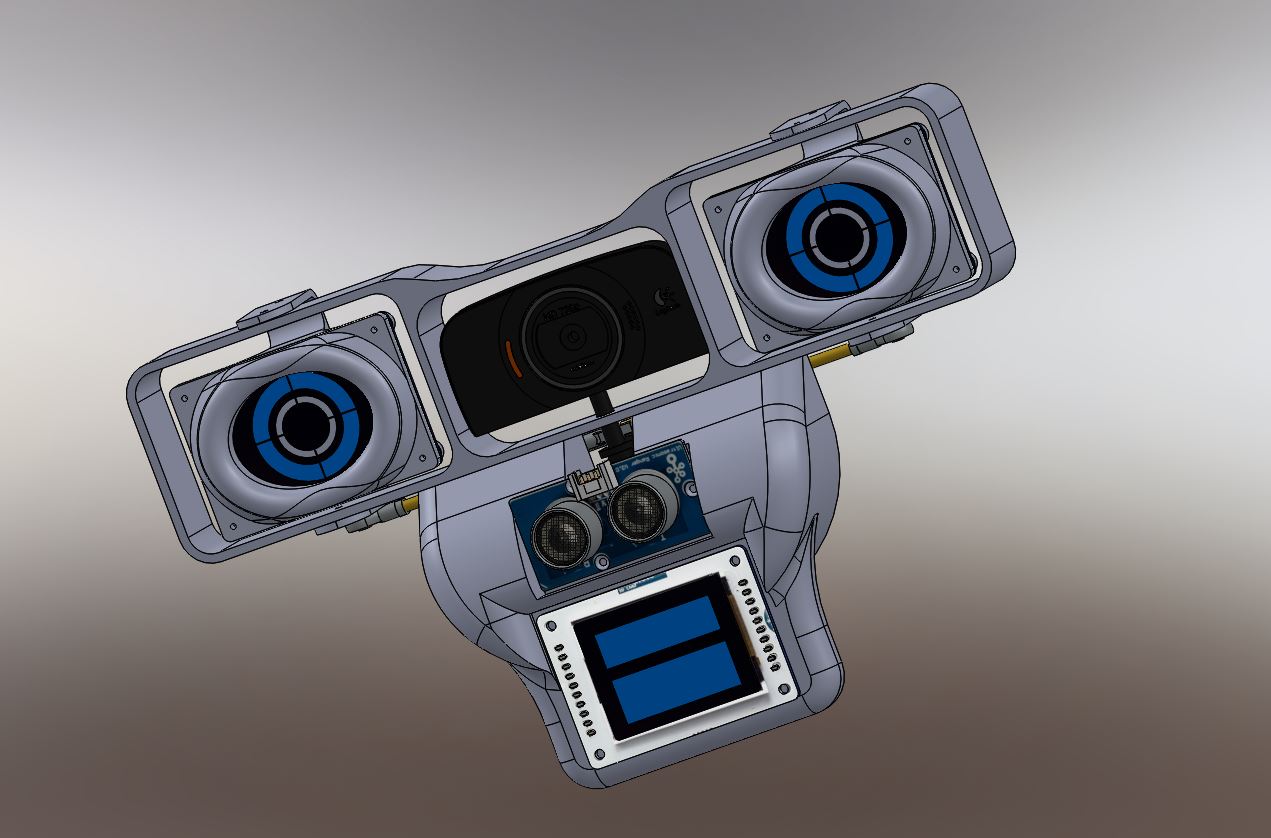
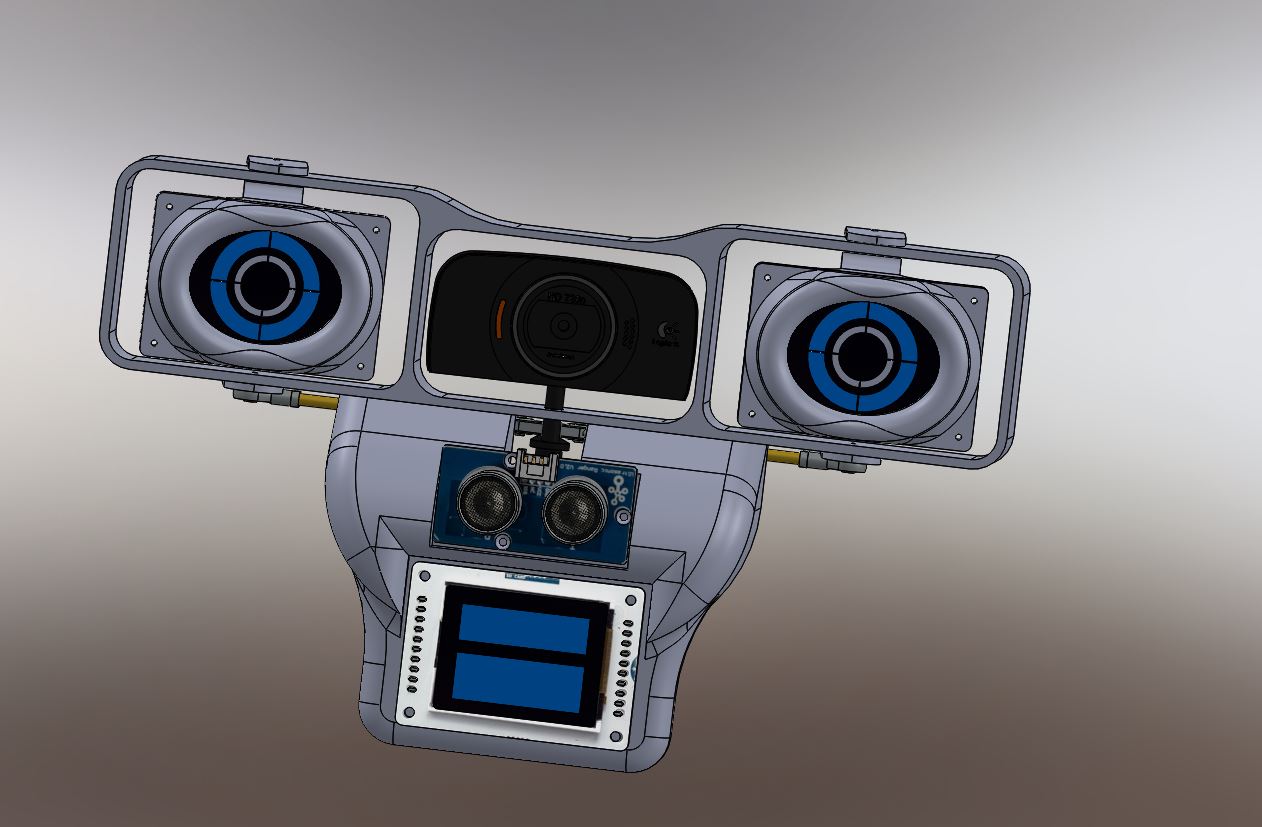
La question est la suivante comment donner une expression à un robot .Nous avons donc pensé que les yeux étaient un bon départ pour déterminer des expressions humaines transposées à la machine .Ces expressions seront de plusieurs natures , un regard attentif , penaud , en colère etc et même quelques expressions comme un clin d’œil .Nous avons donc développé rapidement quelques expressions , puis nous avons mis côte à côte 2 écrans pour imaginer le reste de la tête de Maya
- Le programme de la construction de l’œil est disponible .
- Le programme des différents regards . En cours
Construction de l’oeil de Maya
| Retour au sommaire |
![]()
10-10-2016 Assemblage des yeux et de la bouche de Maya |
| Retour au sommaire |
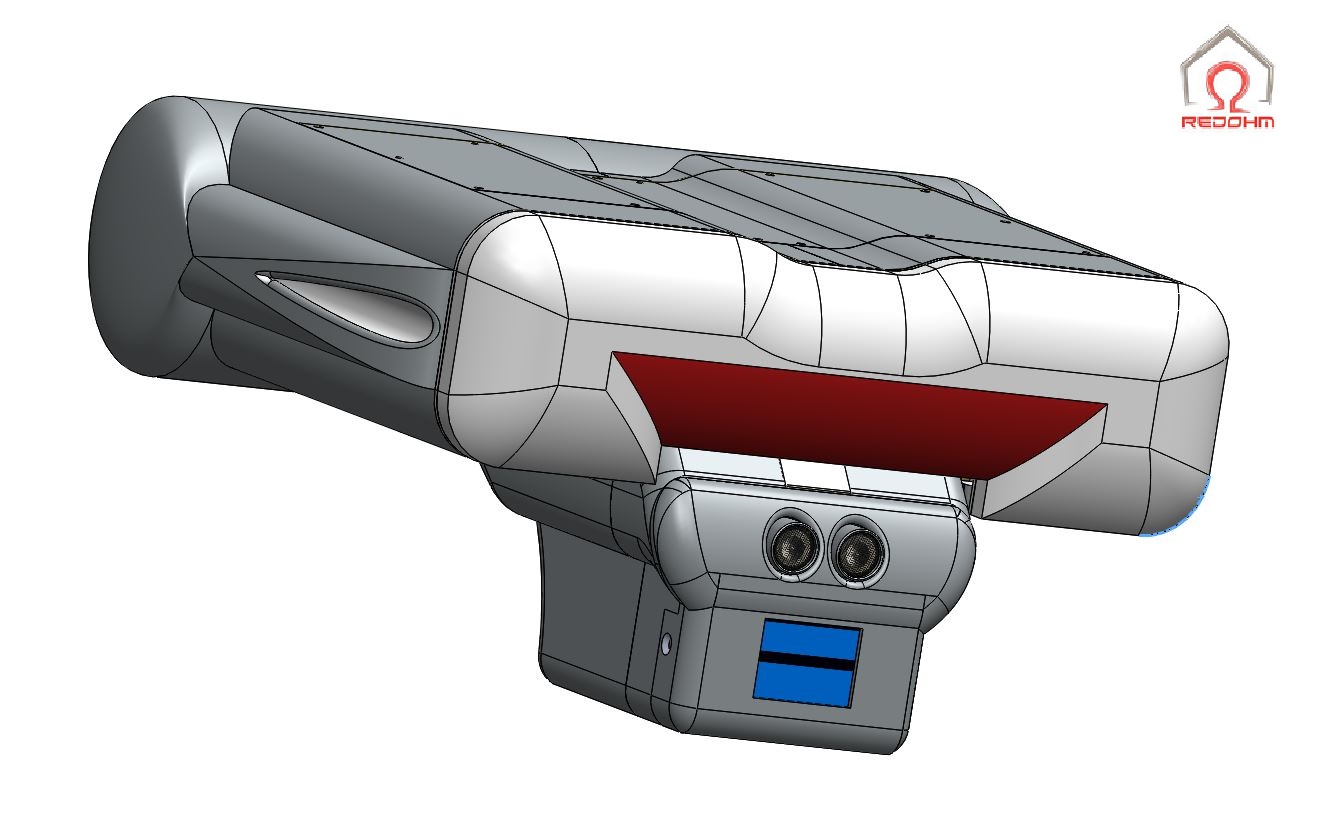
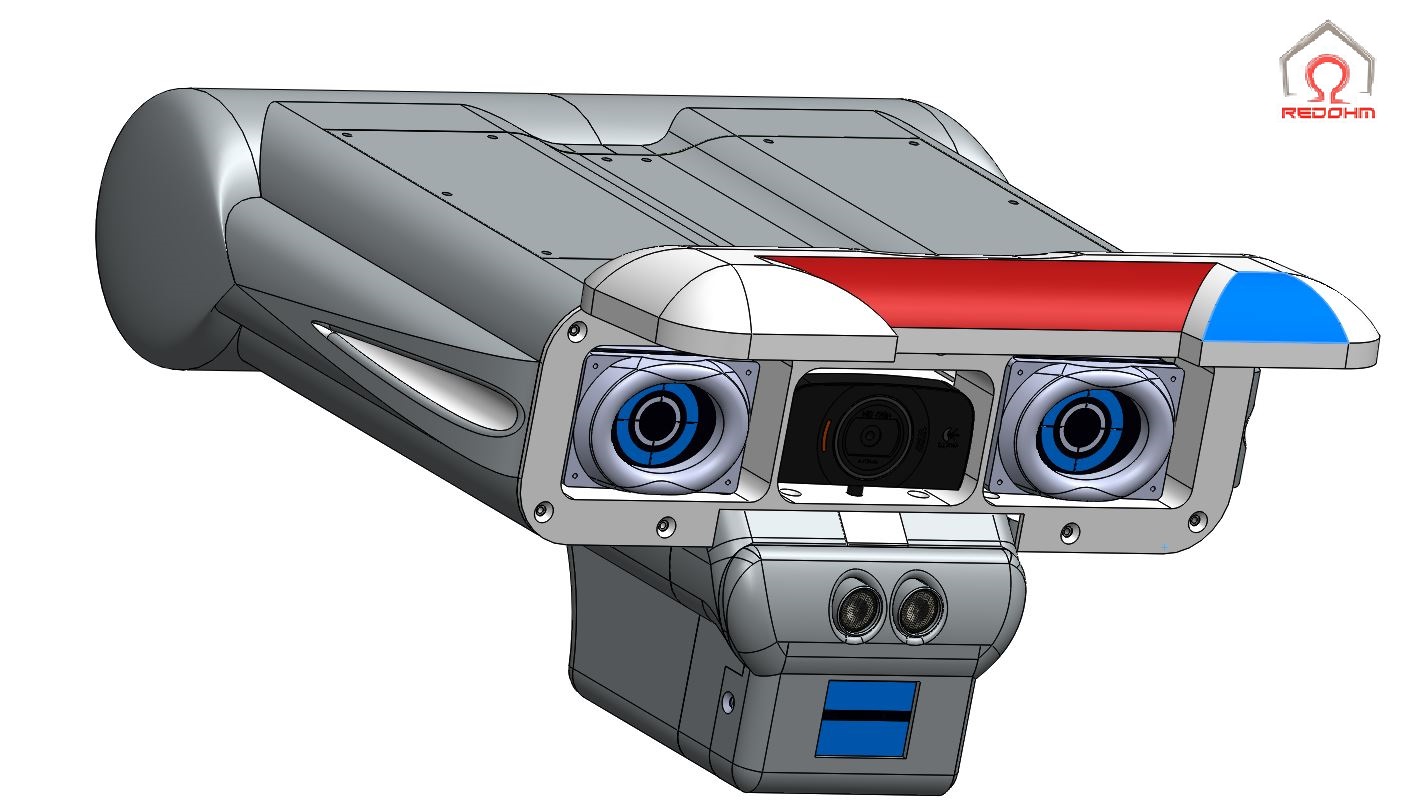
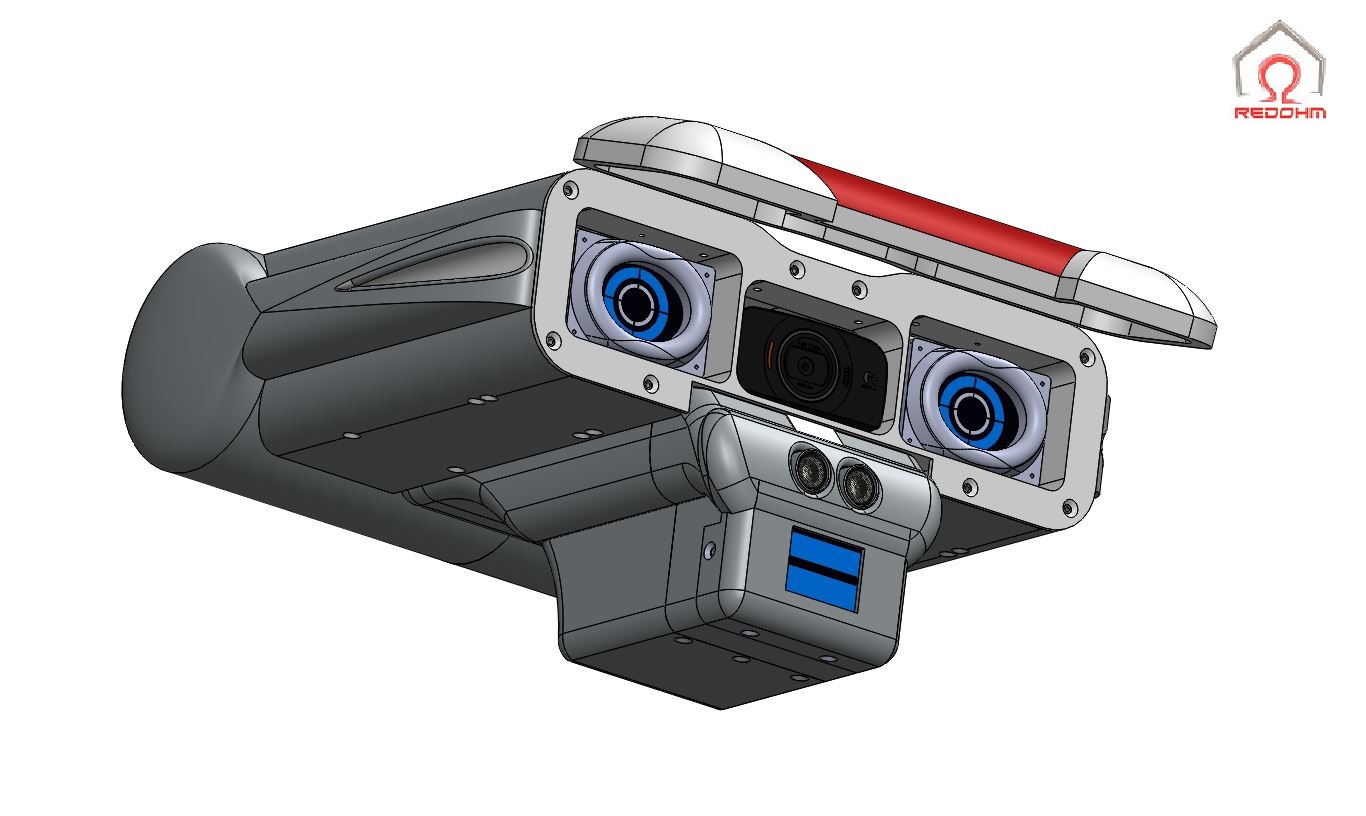
22-10-2016 avancement de la tète de Maya . |
22-10-2016 avancement de la tète de Maya .
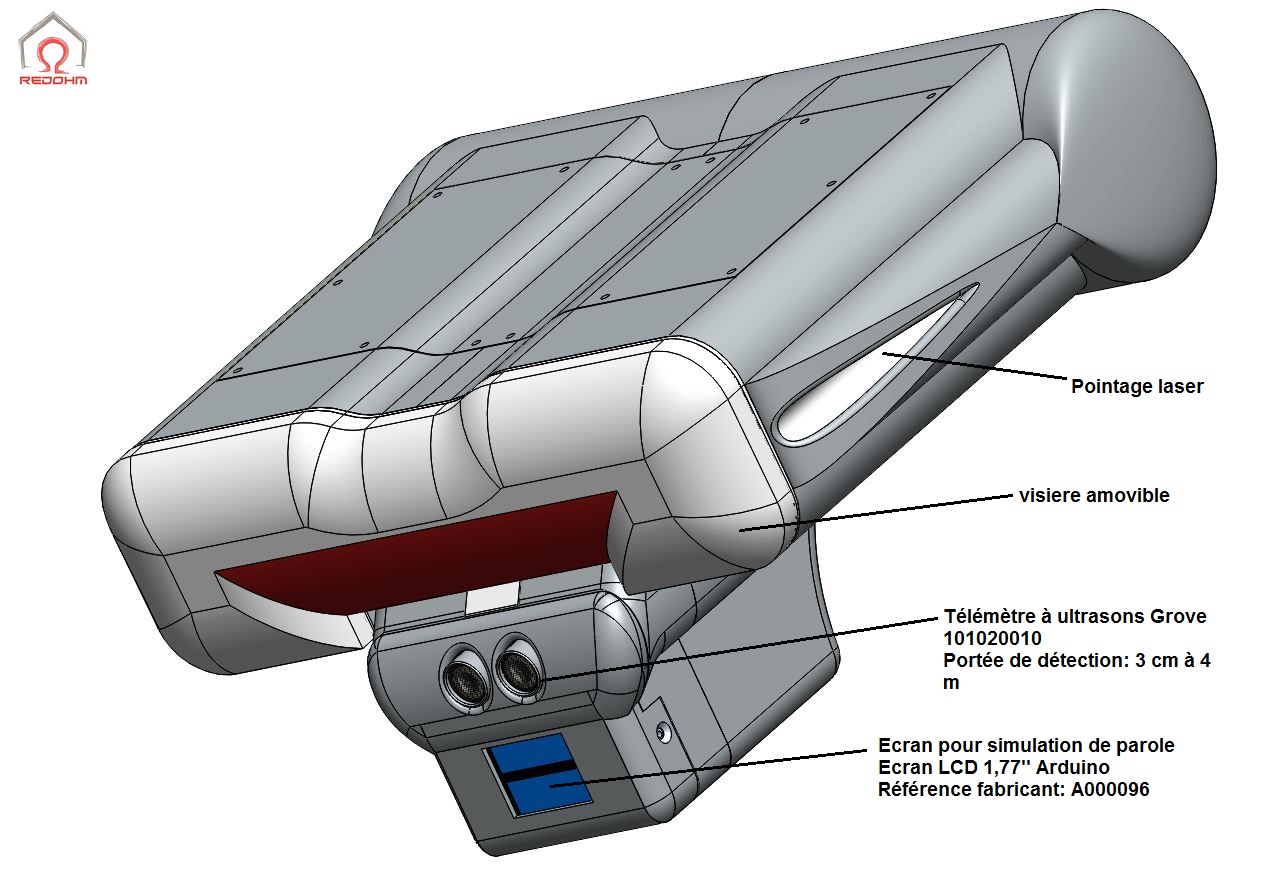
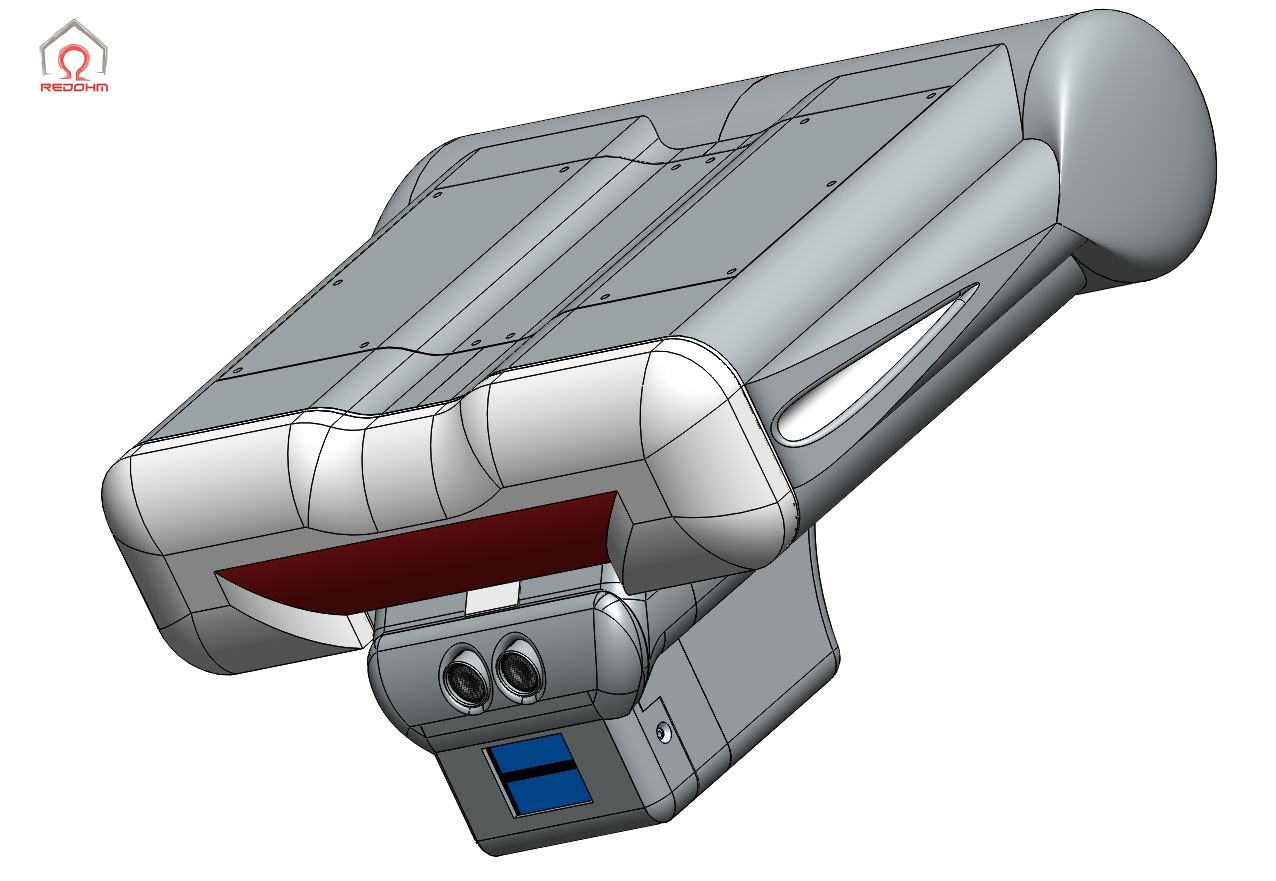
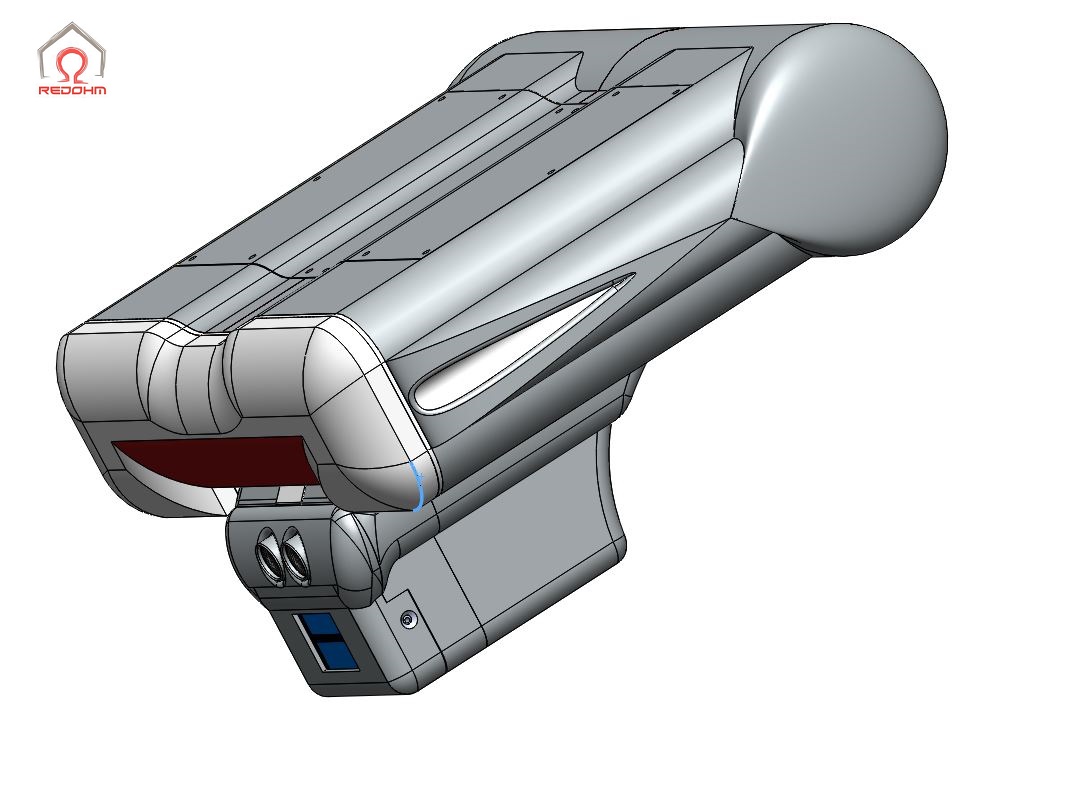
- Positionnement d’une visière amovible
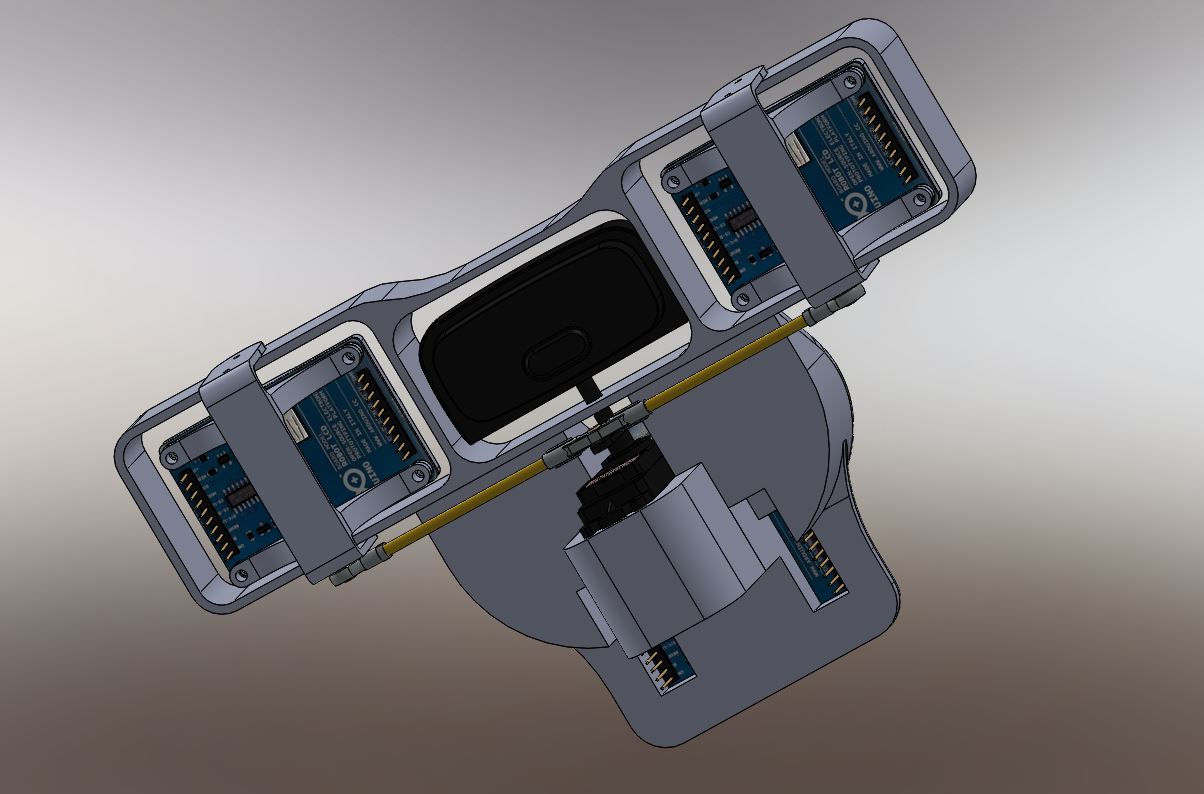
- Les cartes de pilotages pour le système visuel sont en place ( Arduino Mega ) .
- Descriptif technique de la carte :
La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs.
- Du pointeur laser sur la partie gauche de Maya
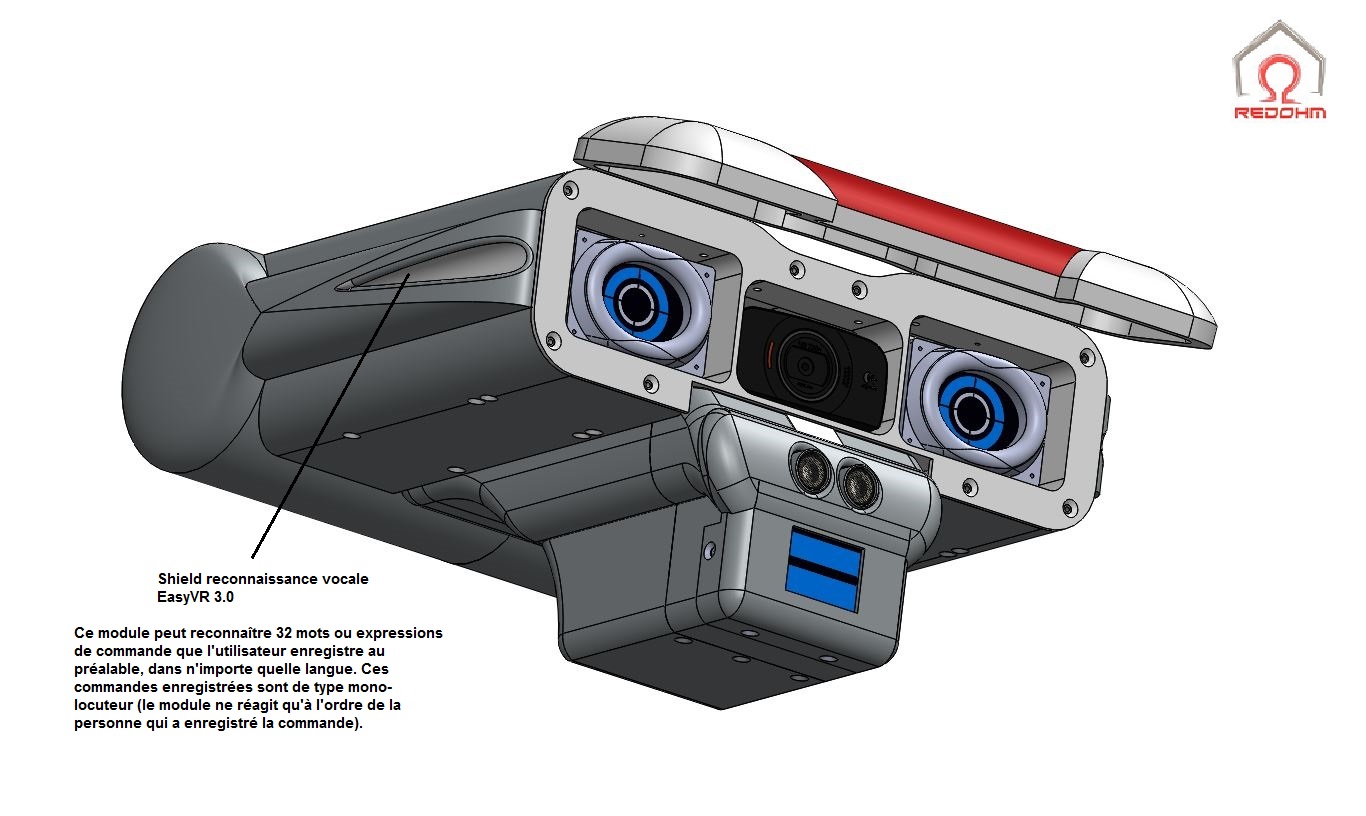
- Du micro avec la carte de reconnaissance vocale du type : EasyVR 3.0
- Descriptif technique de la carte :
Ce module peut reconnaître 32 mots ou expressions de commande que l’utilisateur enregistre au préalable, dans n’importe quelle langue. Ces commandes enregistrées sont de type mono-locuteur (le module ne réagit qu’à l’ordre de la personne qui a enregistré la commande).
Le shield EasyVR dispose également de 26 commandes pré-enregistrées pour chaque langage supporté. Ces expressions sont reconnues quelle que soit la personne qui les prononce. Ces expressions sont: robot, action, bouge, tourne, cours, regarde, attaque, arrête, salut, à gauche, à droite, vers le haut, vers le bas, en avant, en arrière, zéro, un, deux, trois, quatre, cinq, six, sept, huit, neuf, dix)
Le module peut être utilisé avec des cartes équipées d’une interface UART alimentée en 3,3 – 5 Vcc. Le logiciel est téléchargeable gratuitement et le module est livré avec un micro séparé.
Diaporama de la journée du 23/10/2016
| Retour au sommaire |
22-10-2016 Une petite vidéo pour découvrir l’ensemble des pièces qui composent la tête |
***
| Retour au sommaire |
26/10/2016 – Impression 3d des premières pièces du robot Maya |





***
| Retour au sommaire |
27/10/2016 Montage de la partie inférieure du visage |
Les essais de montage sur le robot Maya continuent .Nous avons essayé le montage de l’écran qui fait office de bouche et le montage du capteur ultrasonique.
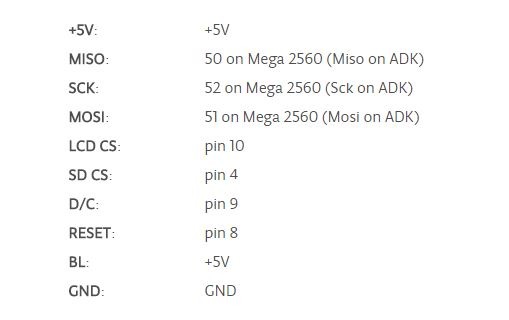
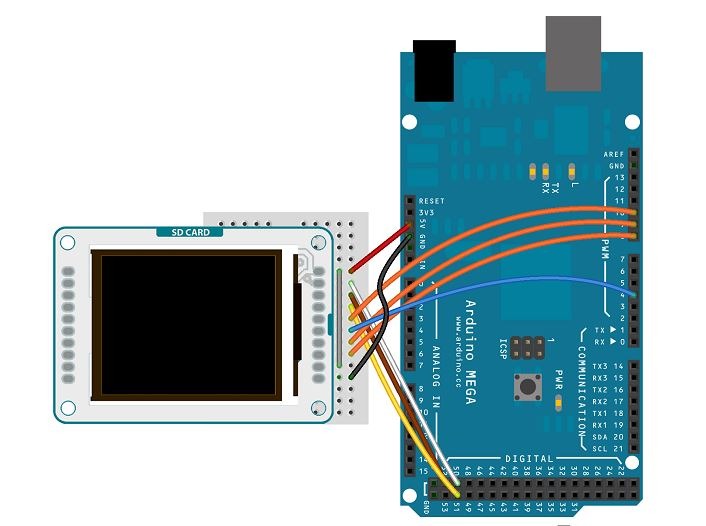
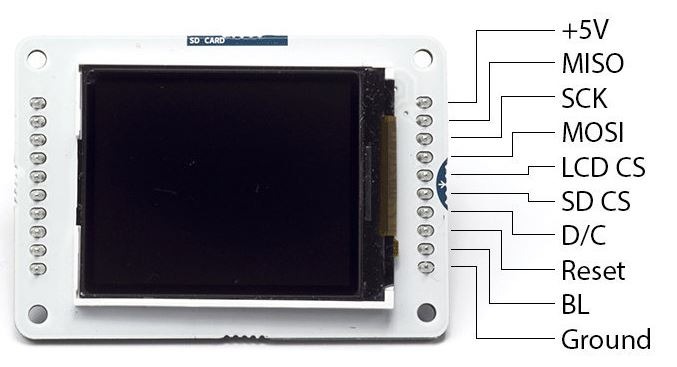
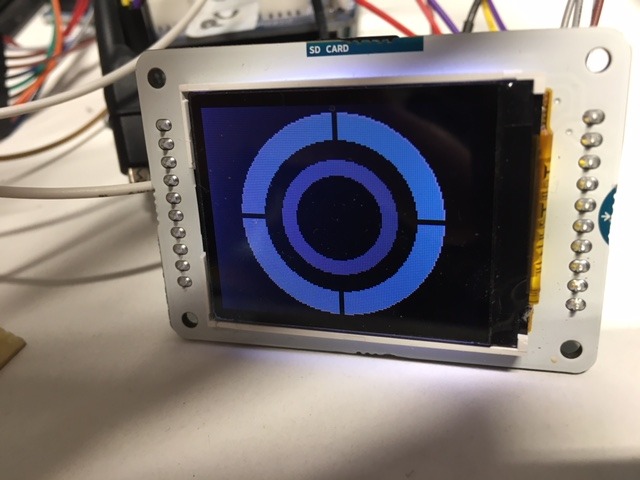
- Descriptif technique de la carte écran qui fait office de bouche
Ecran couleur LCD TFT 1,77″ Arduino spécialement prévu pour être raccordé sur la carte Arduino Esplora via 2 rangées de connecteurs. Cet afficheur peut également fonctionner avec les cartes UNO, Leonardo, Due, etc.
Le module est équipé d’un port micro-SD, ce qui permet notamment de stocker et afficher des images bitmap et il communique avec la carte Arduino via le port SPI. La librairie contenue dans la version Arduino 1.5.8 beta est nécessaire au bon fonctionnement de cet afficheur.
Alimentation: 5 Vcc
Ecran: 1,77″
Couleurs: 262000
Résolution: 160 x 128 pixels
Port: SPI
Support carte: micro-SD
Température de service: -20 à +70°C
Dimensions: 60 x 42 x 15 mm
Référence fabricant: A000096
Utilisation pratique de l’afficheur : RedOhm le regarde attentif
Prix moyen entre : 22 à 30€
Fournisseur : generationrobots
- Descriptif technique de la mesure de distance ( moyenne 4 m max )
Ce télémètre compatible Grove permet de mesurer la distance sans contact à l’aide de transducteurs à ultrasons.Il se raccorde sur une entrée analogique du Grove Base Shield ou du Mega Shield via un câble 4 conducteurs .
Interface: compatible Grove
Alimentation: 5 Vcc
Consommation: 15 mA
Fréquence: 40 kHz
Sortie digitale:
– état HAUT: ligne noire détectée
– état BAS: couleur blanche détectée
Led: rouge si détection d’une ligne noire
Portée de détection: 3 cm à 4 m
Résolution: 1 cm
Dimensions: 43 x 25 x 15 mm
Référence Seeedstudio: 101020010 (remplace SEN10737P)
Prix moyen entre : 13 à 16€
Fournisseur : gotronic.fr







***
| Retour au sommaire |
29/10/2016 Modifications du robot Maya avec la pose du cou |
***
| Retour au sommaire |
![]()
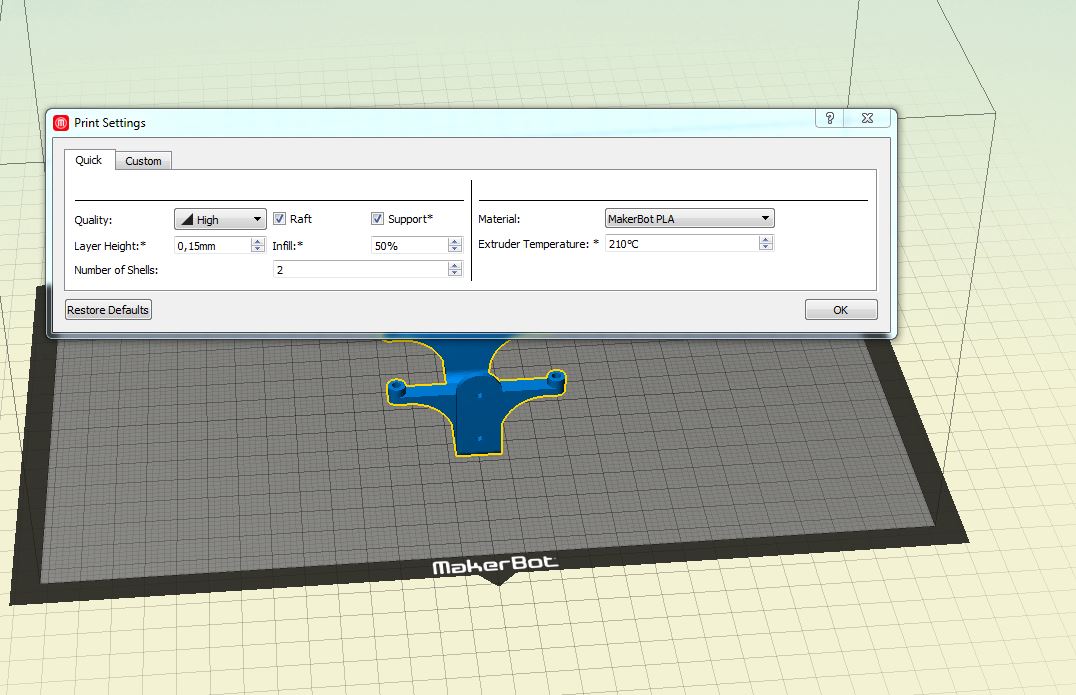
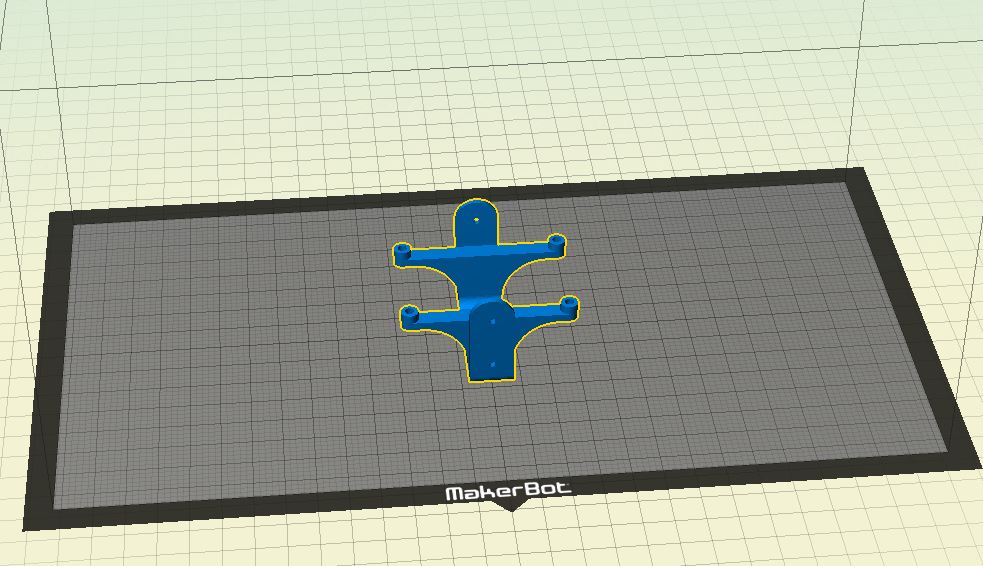
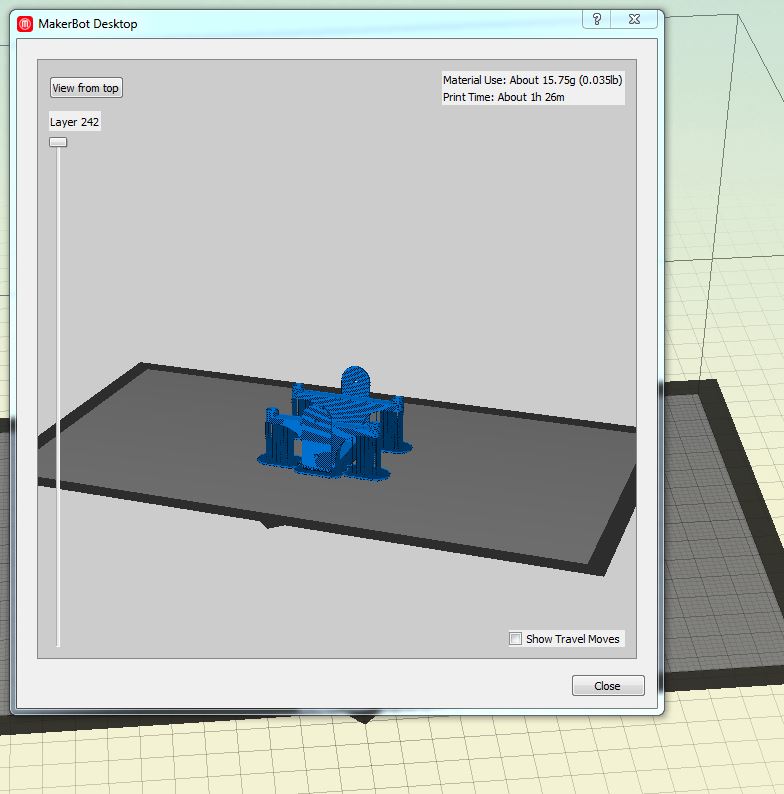
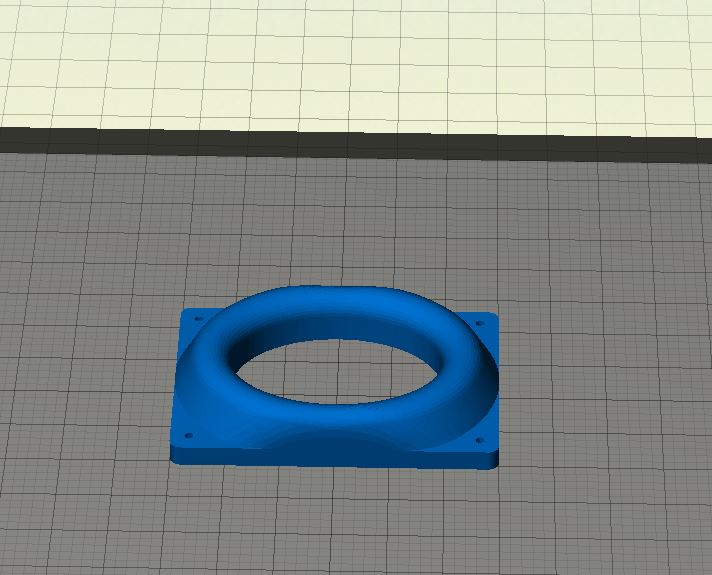
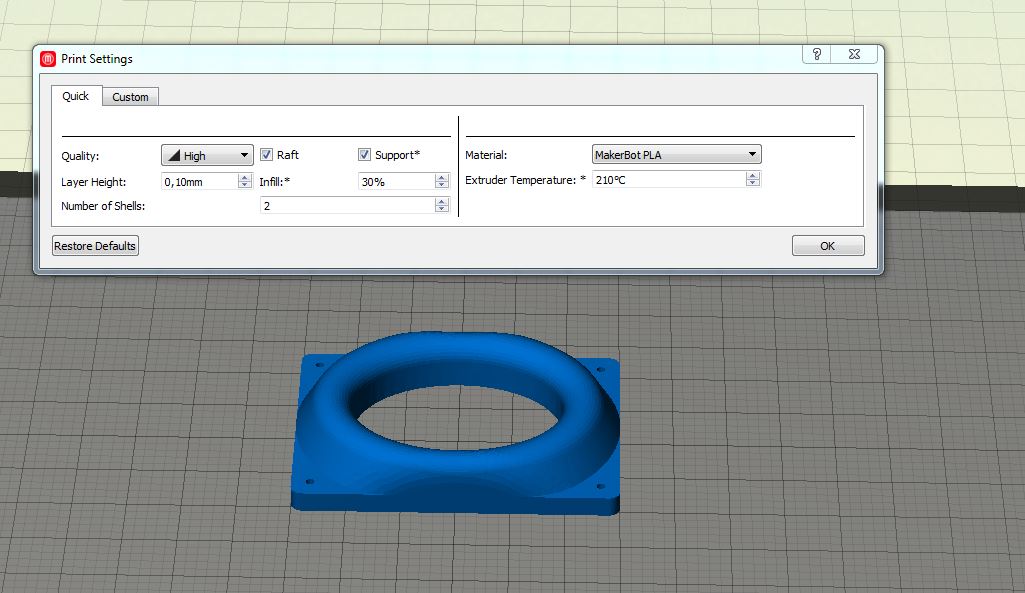
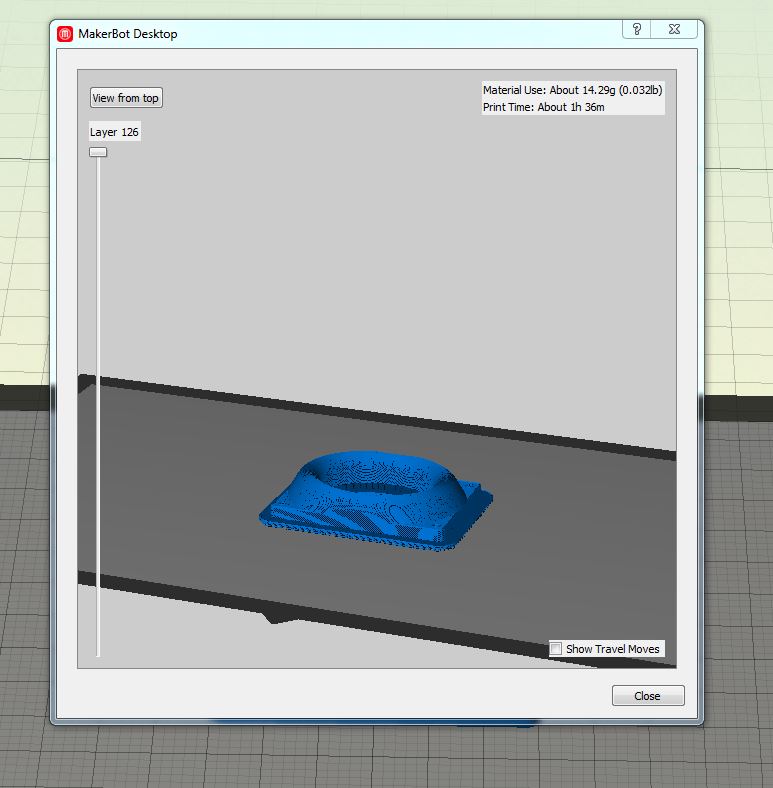
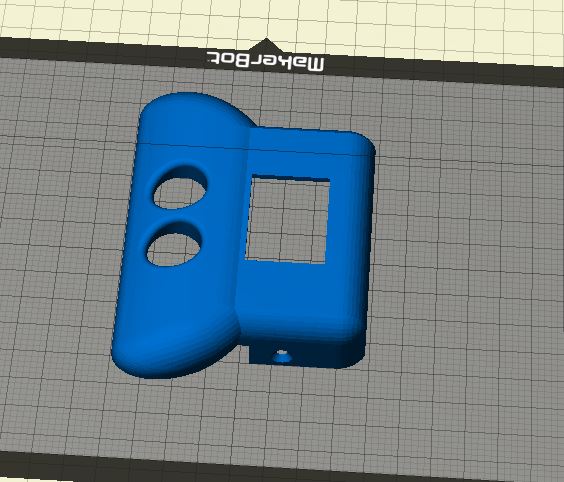
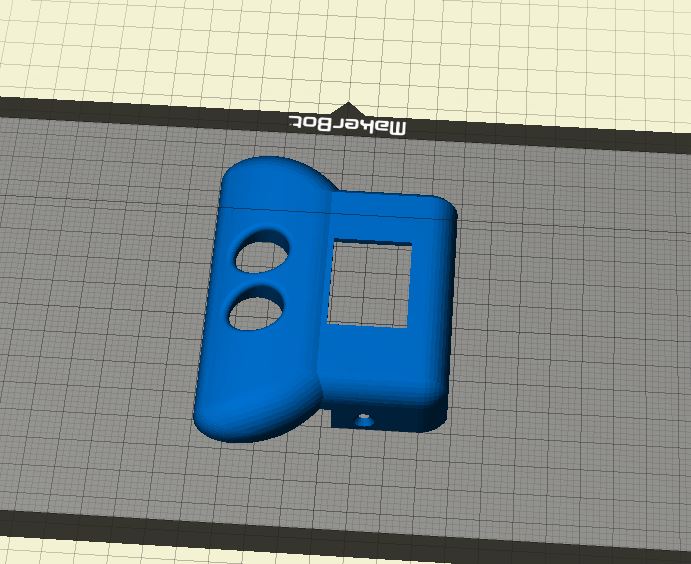
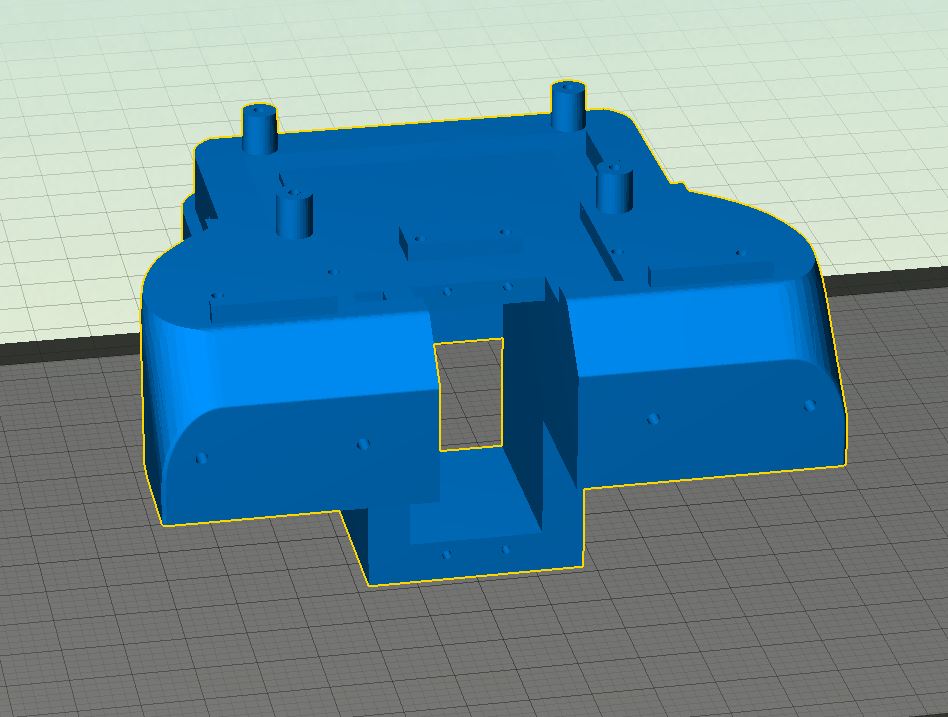
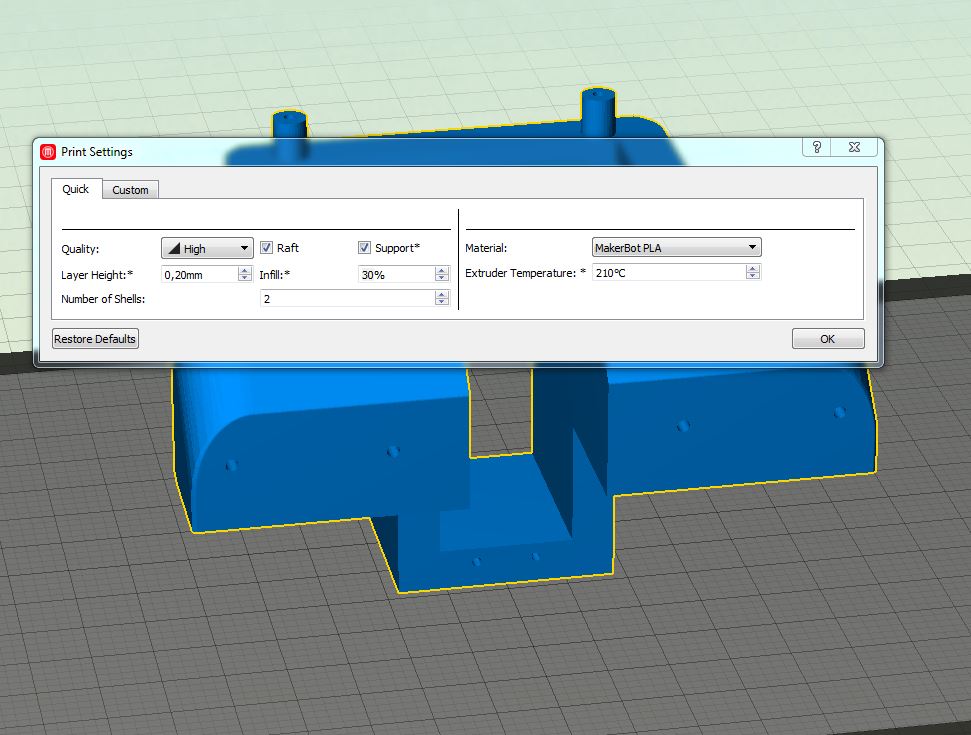
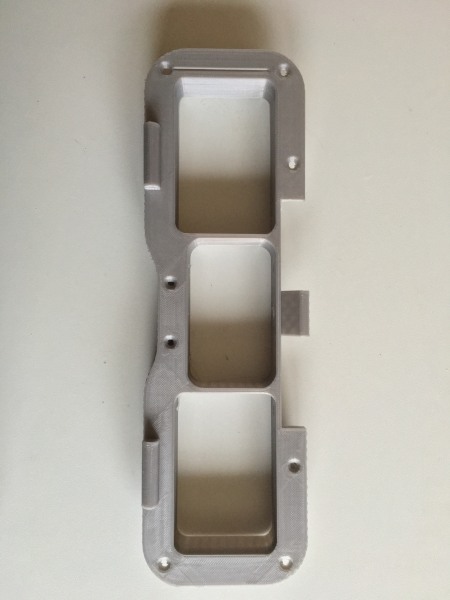
02/11/2016 Impression des pièces Version 2.00 |
Nous avons sorti l’ensemble des pièces principales du système de vision ainsi que la partie de la mâchoire inférieure et le carter. L’ensemble de ces pièces ont déjà subi quelques modifications. Nous sommes déjà à la version 2.00
***
Visualisation des pièces ci-dessus





***
| Retour au sommaire |
![]()
17/11/2016 Vidéo de l’ensemble tête , thorax, épaule |
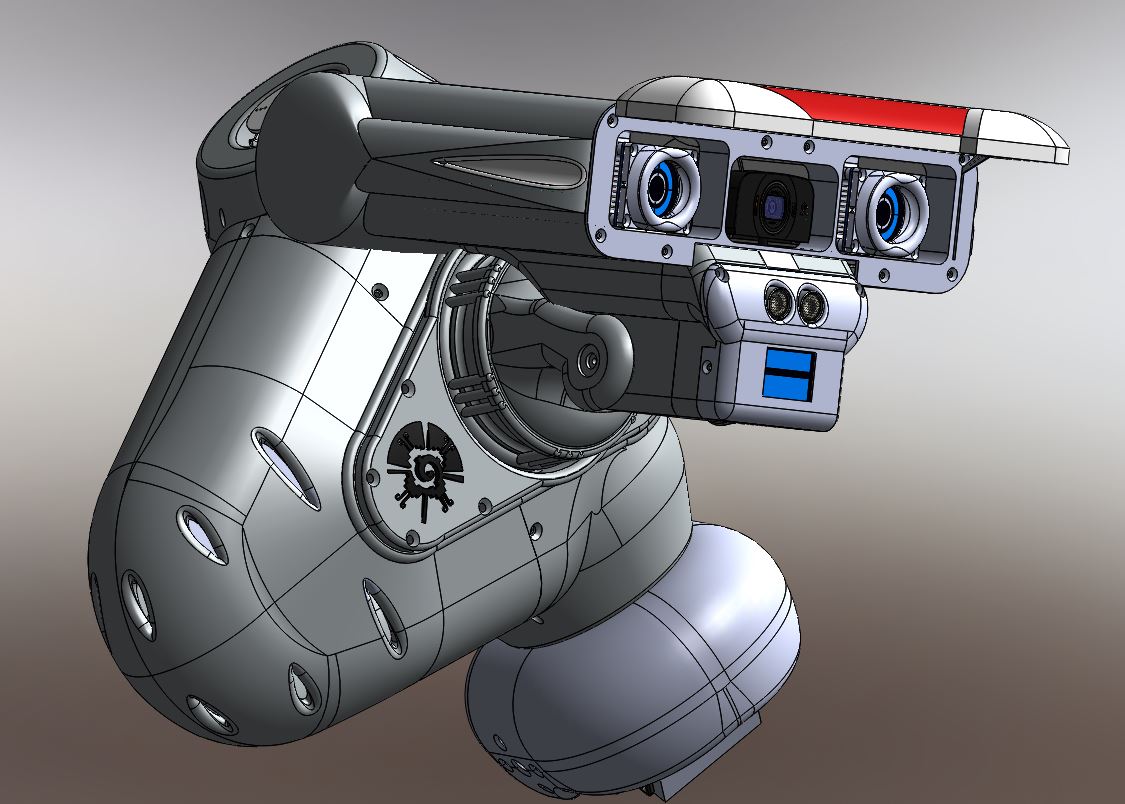
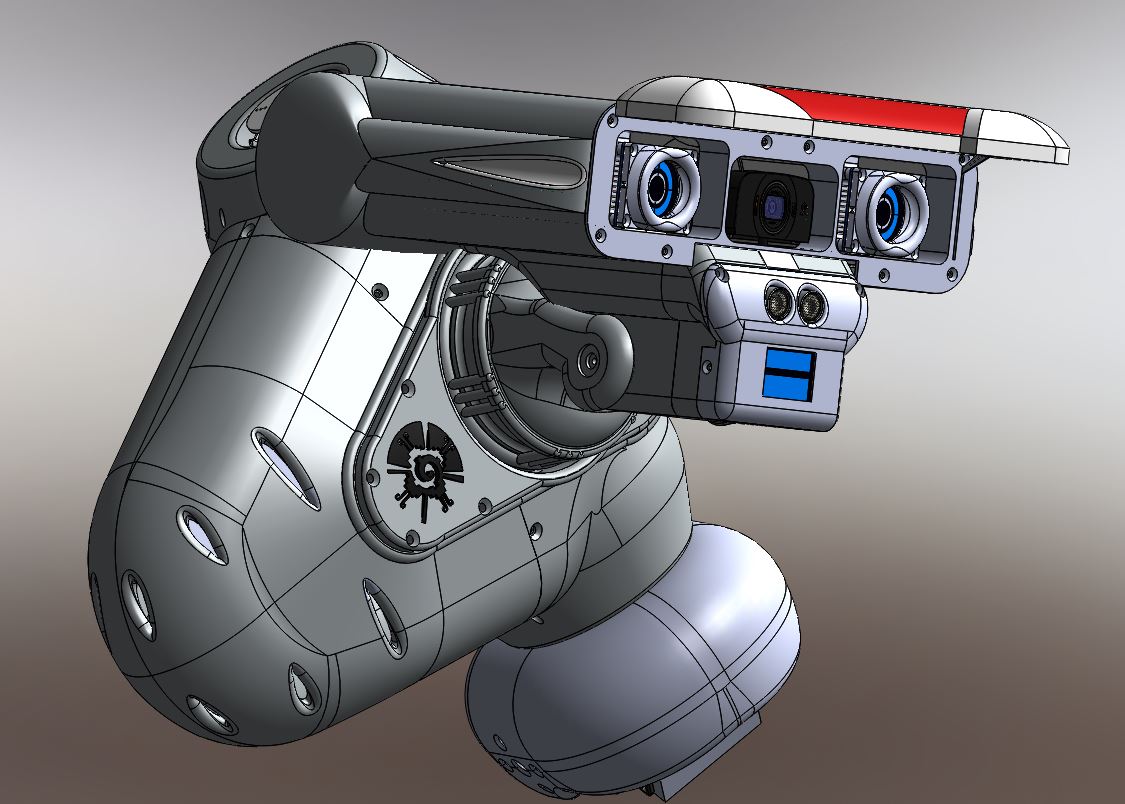
Présentation de l’ensemble tête , thorax , épaule de notre robot Maya . Cette vidéo à pour but de vous donner un aperçu du rendu de l’ensemble ainsi qu’une vision des mouvements de la tête .
| Retour au sommaire |
![]()
20/11/2016 Premiers essais du robot Maya |
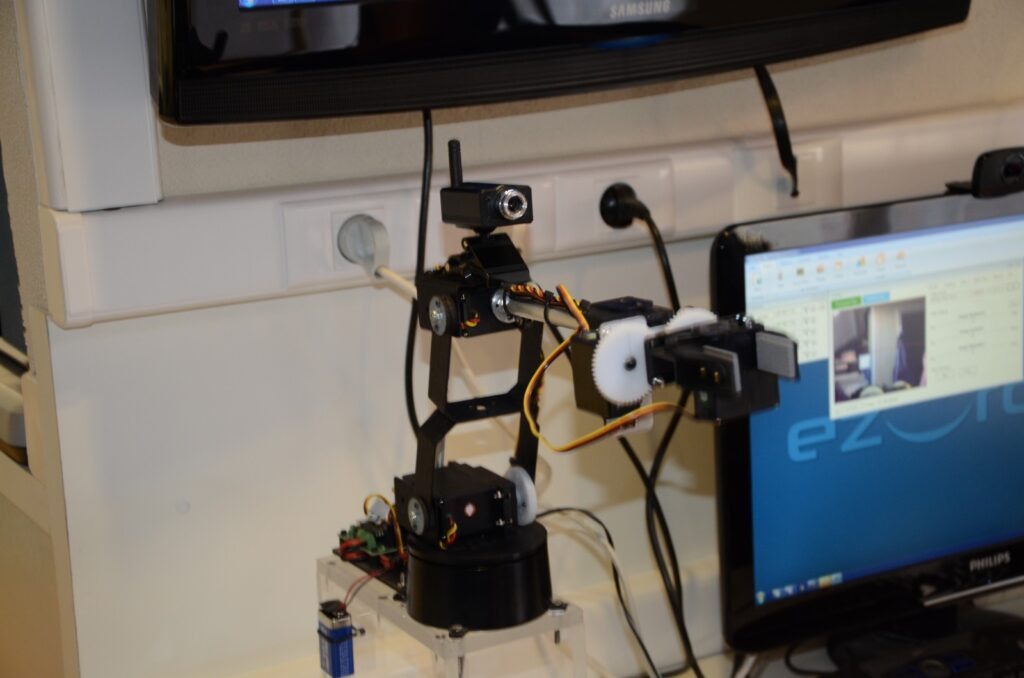
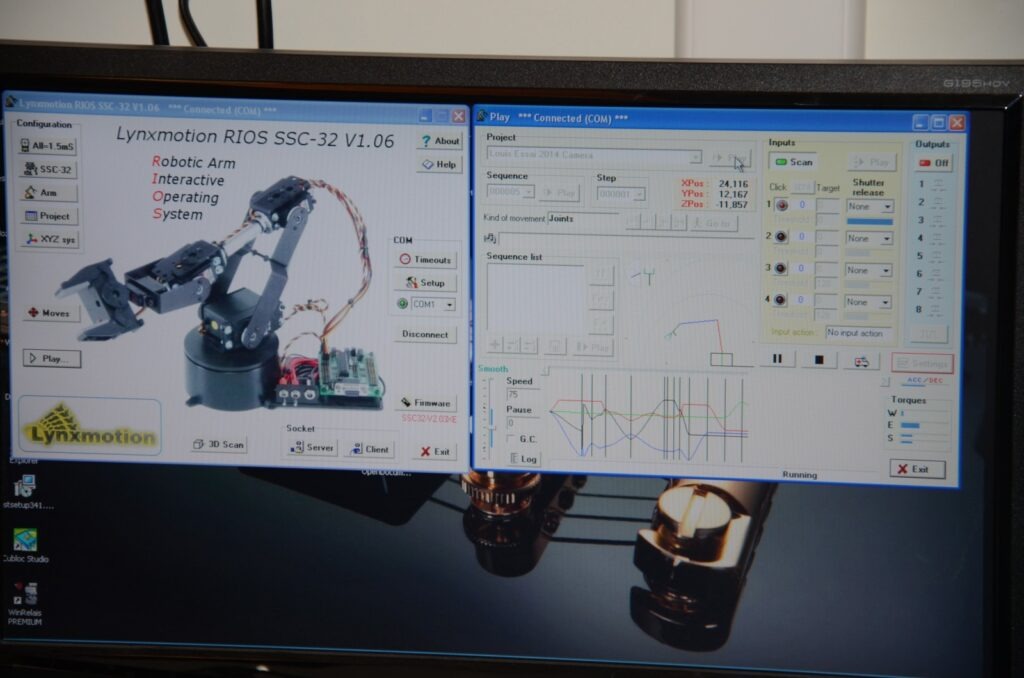
Utilisation du materiel ci-dessous pour les essais
La carte EZ-B V4 permet de contrôler et commander un robot ou autre application de votre choix pilotée par PC via une liaison Wifi. Il suffit d’utiliser une plateforme de base ou de construire vous-même un robot de base et d’ajouter la carte EZ-B.
L’utilisation du logiciel EZ-Builder sur votre ordinateur vous permet de contrôler les sorties de la carte de commande EZ-B. Ajoutez des capteurs, caméras, leds, servomoteurs, afficheurs digitaux, contrôleurs de moteurs, etc pour réaliser le projet.
Le logiciel graphique EZ-Builder est prévu pour ceux qui ne souhaitent pas programmer. Il suffit de connecter les capteurs, servomoteurs, leds, afficheurs LCD et bouton à la carte EZ-B et d’utiliser le logiciel graphique pour commander le robot à partir de votre PC.
- Alimentation à prévoir: 9 Vcc (6 piles AA non incluses)
- 8 entrées analogiques
- 24 E/S digitales (dont PWM, ports série et commandes servos)
-
3 ports I2C
-
Processeurs: Cortex M3 ARM 120 MHz et Microchip PIC32 80 MHZ
-
Fréquence de fonctionnement: 120 MHz + 80 MHz
-
wifi: Hoc, infrastructure, WEP, WPA et WPA2
-
Fusible réarmable
-
Dimensions avec socle: 70 x 67 x 56 mm
Premiers essais du robot Maya 20/11/2016
***
| Retour au sommaire |
![]()
26/11/2016 Etude du montage des épaule sur le thorax |
***
Utilisation de servomoteur MASTODON 9944 pour les articulations des épaules
Le servomoteur digital Mastodon 9944 est idéal pour les gros modèles de modèle réduit . Son boîtier en aluminium parfaitement étanche, usiné dans la masse, ses pignons en métal et son axe de sortie à roulement à billes vous offrent de belles performances.
Caractéristiques :
- Boîtier en aluminium usiné dans la masse.
- Parfaitement étanche
- Train de pignons métalliques parfaitement dimensionné
- Axe de sortie supporté par 2 gros roulements à billes
- Moteur électrique de bonne dimension
- Disque servo en aluminium Ø46mm (épaisseur 3mm!)
- Alimentation 7,4V séparée (accu LiPo 2S)
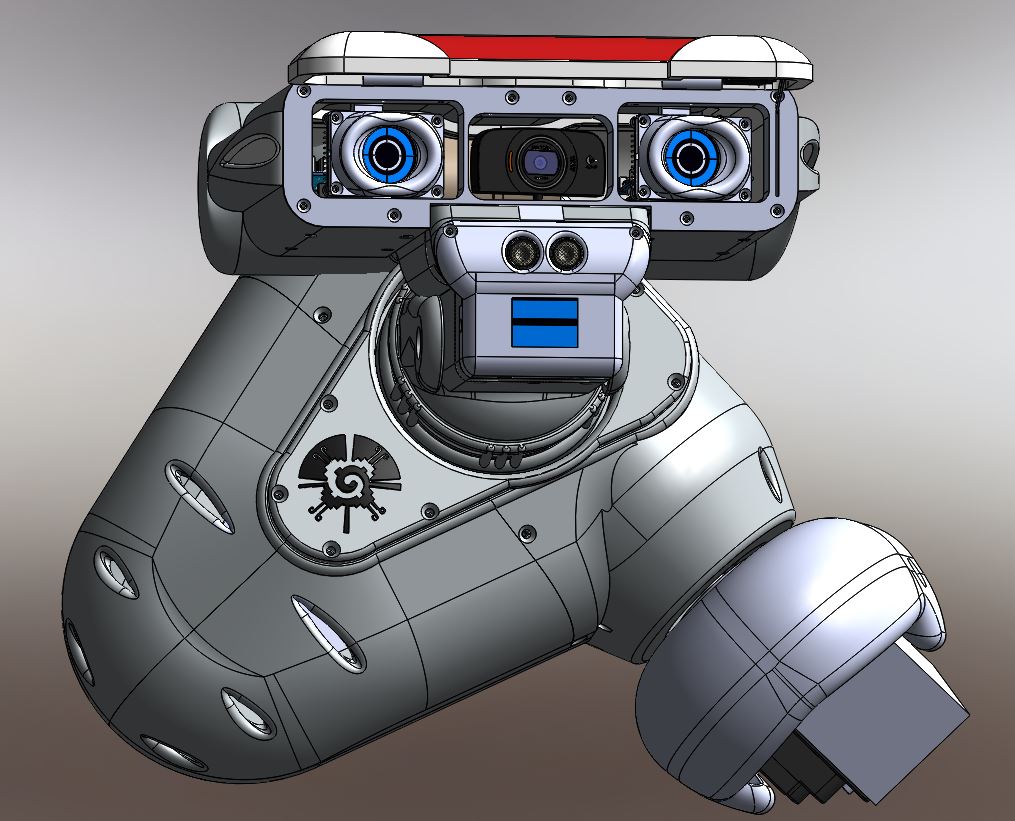
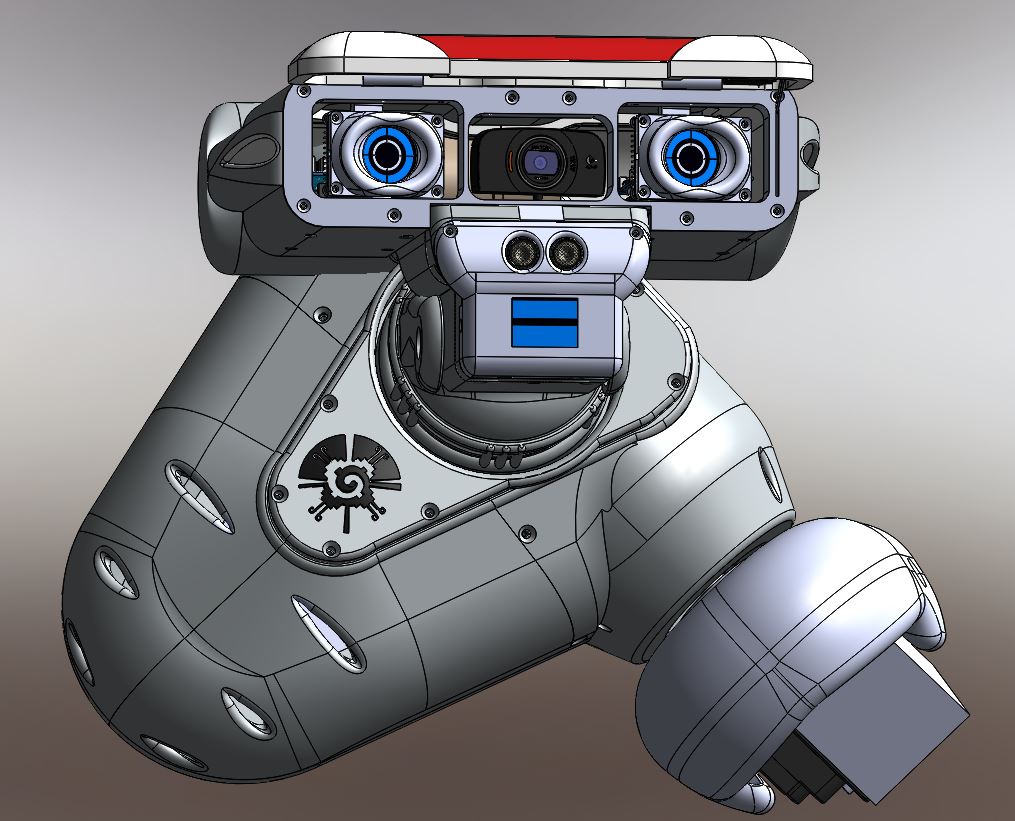
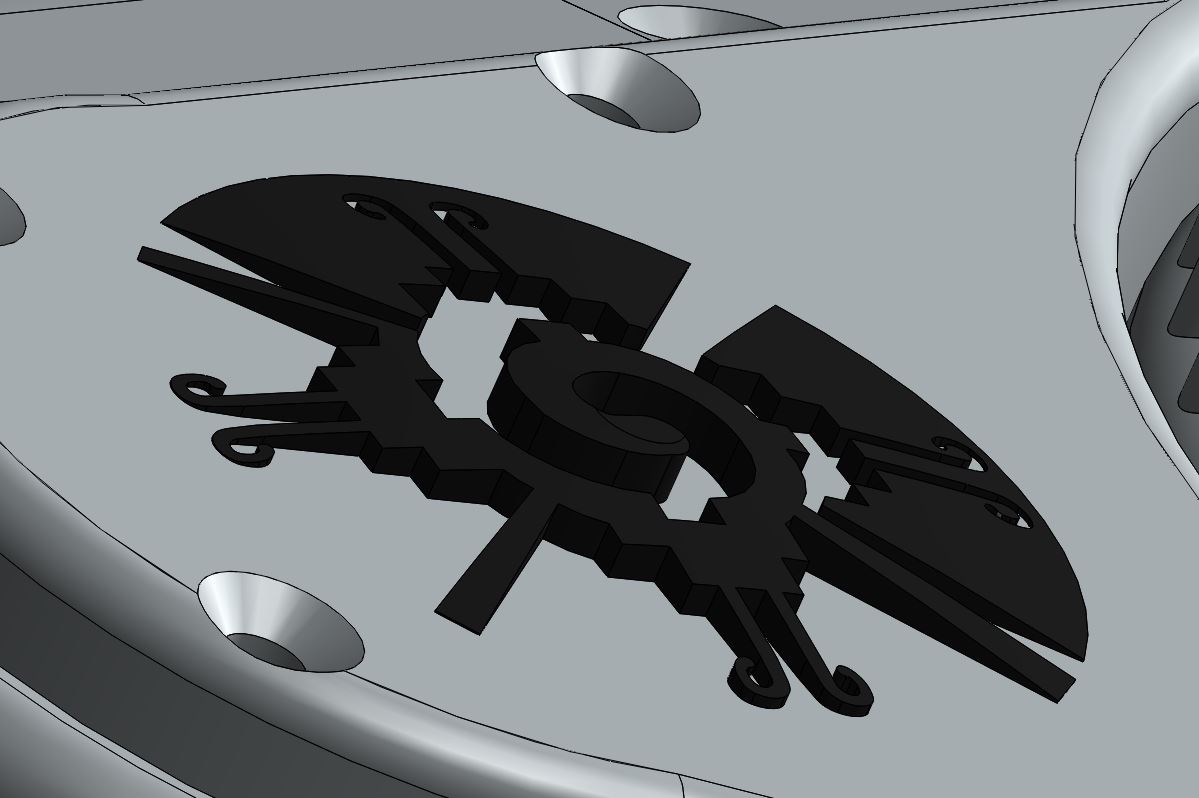
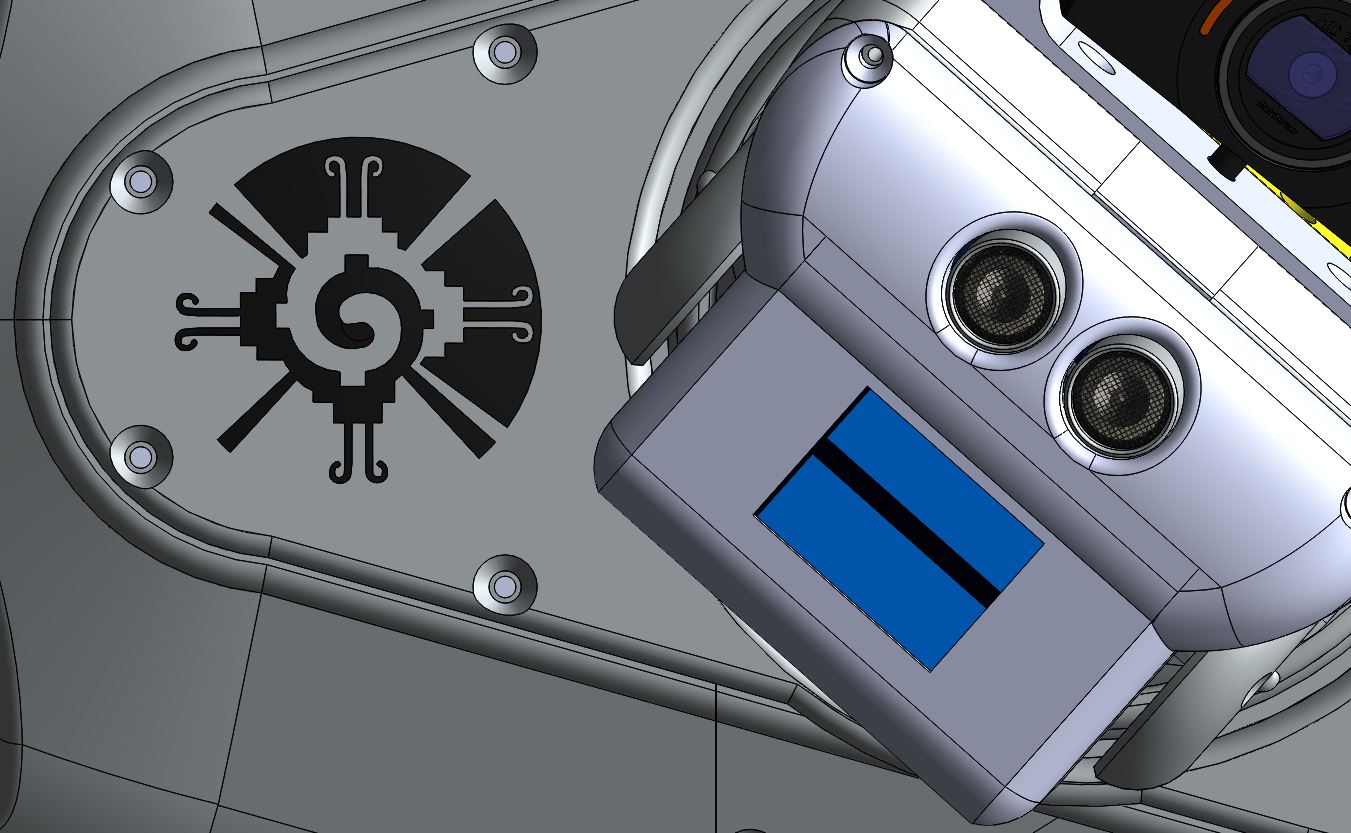
Décoration de la carcasse du robot Maya
Nous avons aussi ajouté des symboles Maya sur la carcasse du robot comme décoration, par exemple sur le support porte coup le papillon galactique .
RedOhm le robot Maya : sur la base du porte cou le symbole du papillon galactique
Quelle est la définition du papillon galactique dans la culture Maya ?
Ce symbole est appelé Hunab Ku ou Papillon Galactique dans la mythologie Maya ; il est dit qu’il représente toute la Conscience ayant jamais existé dans cette galaxie. Il englobe la totalité de nos ancêtres sur le plan physique, les humains, les animaux, les reptiles, les poissons, les crustacés et également les plantes en tant que conscience qui organise toute matière à l’état brut à partir d’un disque tournoyant dans les étoiles, les planètes et les systèmes solaires. Ceci possède une grande signification. Si grande que les Mayas d’origine ne possédaient aucun symbole pour cela. Dans leur civilisation il n’y avait pas de nom pour « Dieu ». La connaissance du concept était suffisante.
Pour plus d’information sur le papillon Galactique :
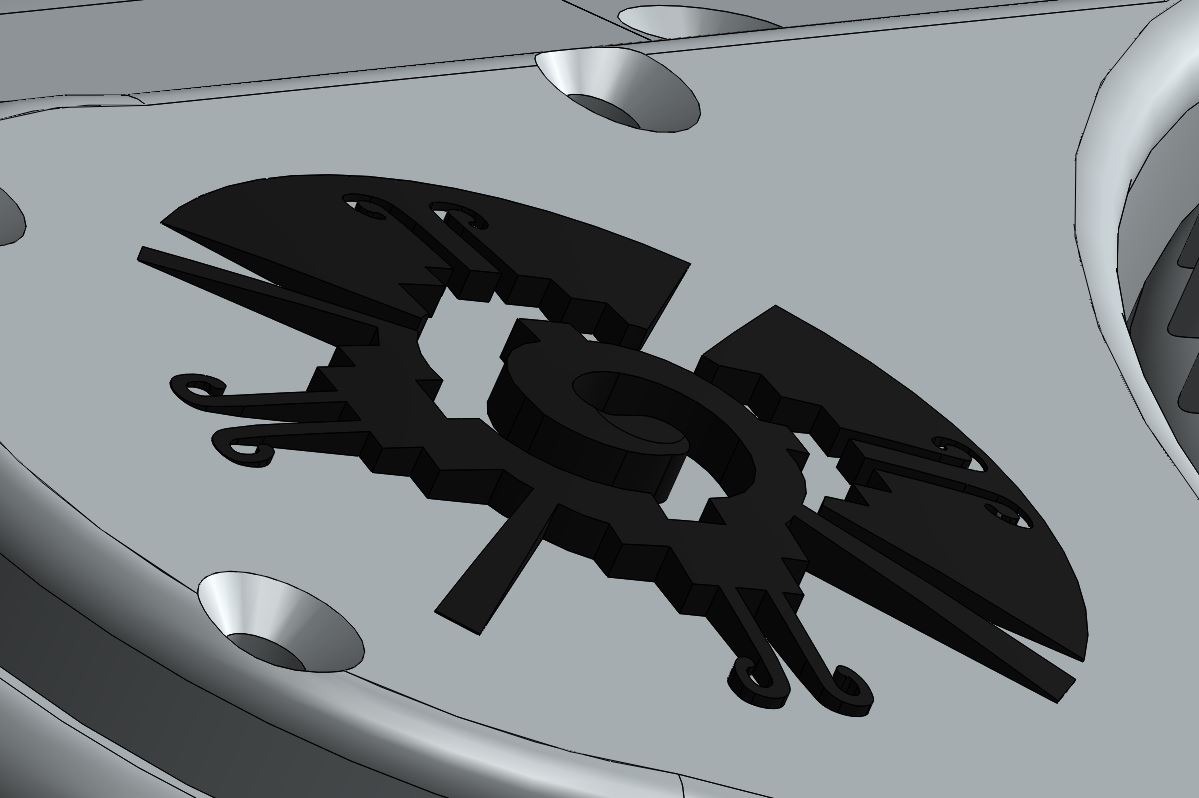
Ce symbole est appelé Hunab Ku ou Papillon Galactique dans la mythologie Maya . RedOhm
Un récapitulatif en vidéo du travail accompli le 26/11/2016
***
| Retour au sommaire |
![]()
03/12/2016 Montage du thorax , du cou , de la tête et essai de l’ensemble |
Maya construction du thorax , du cou ,de la tête RedOhm
| Retour au sommaire |
![]()
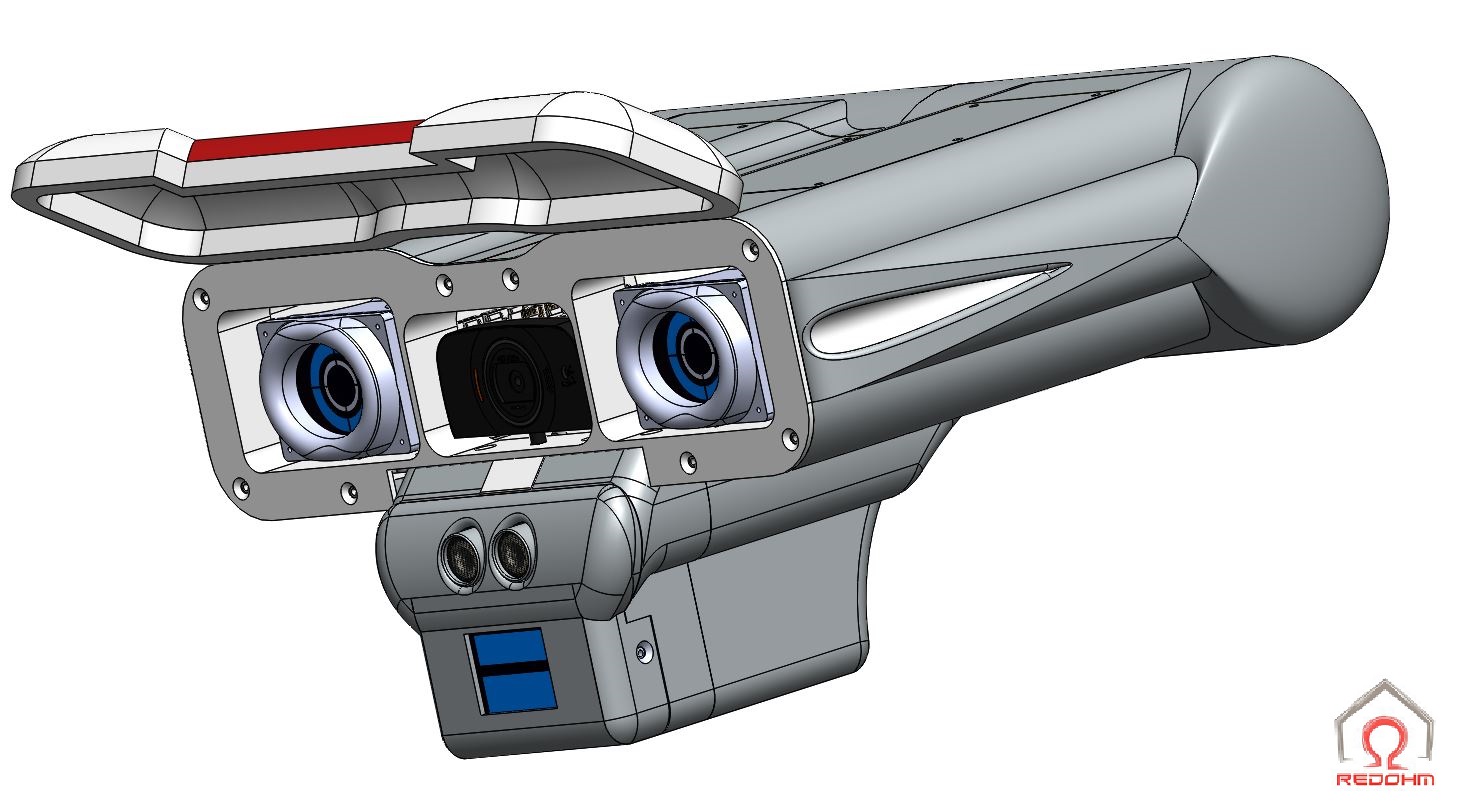
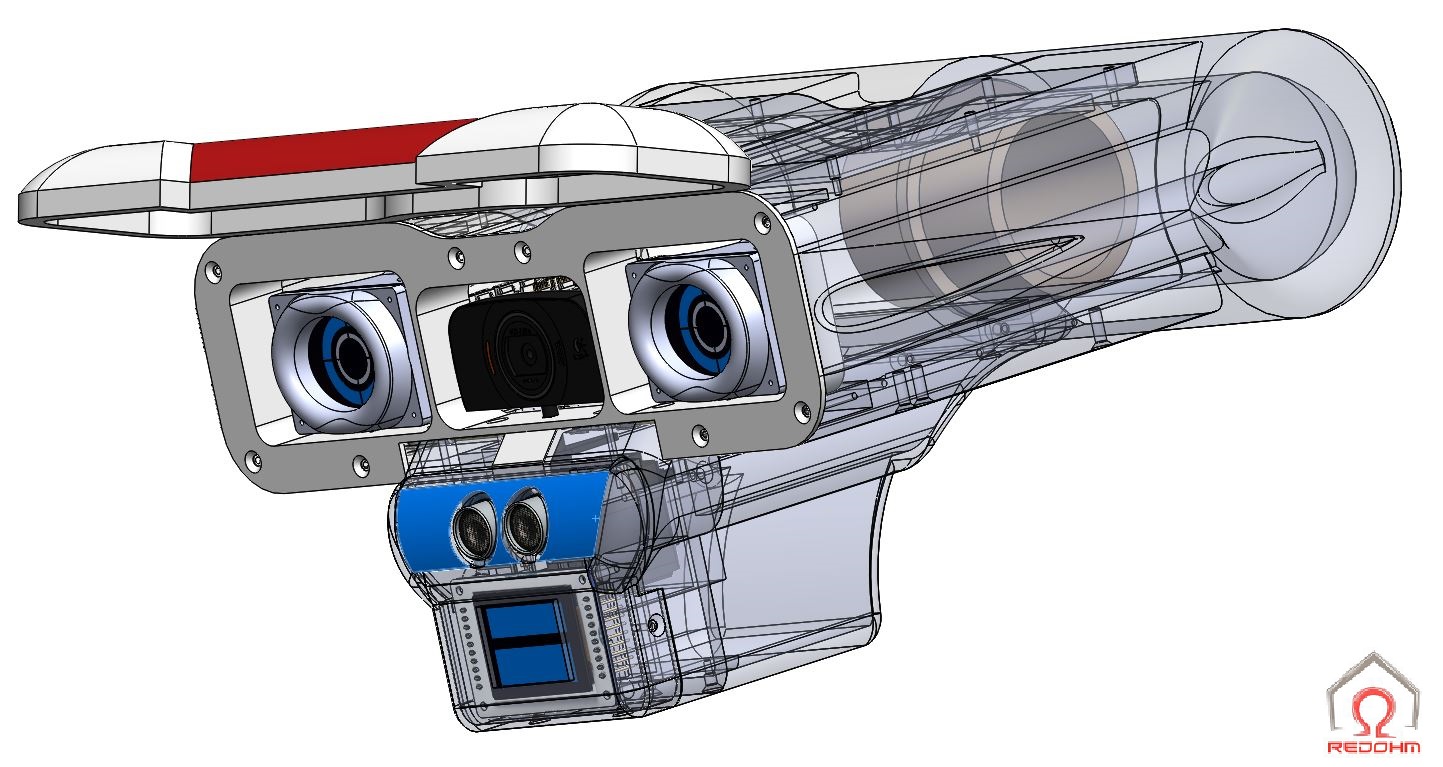
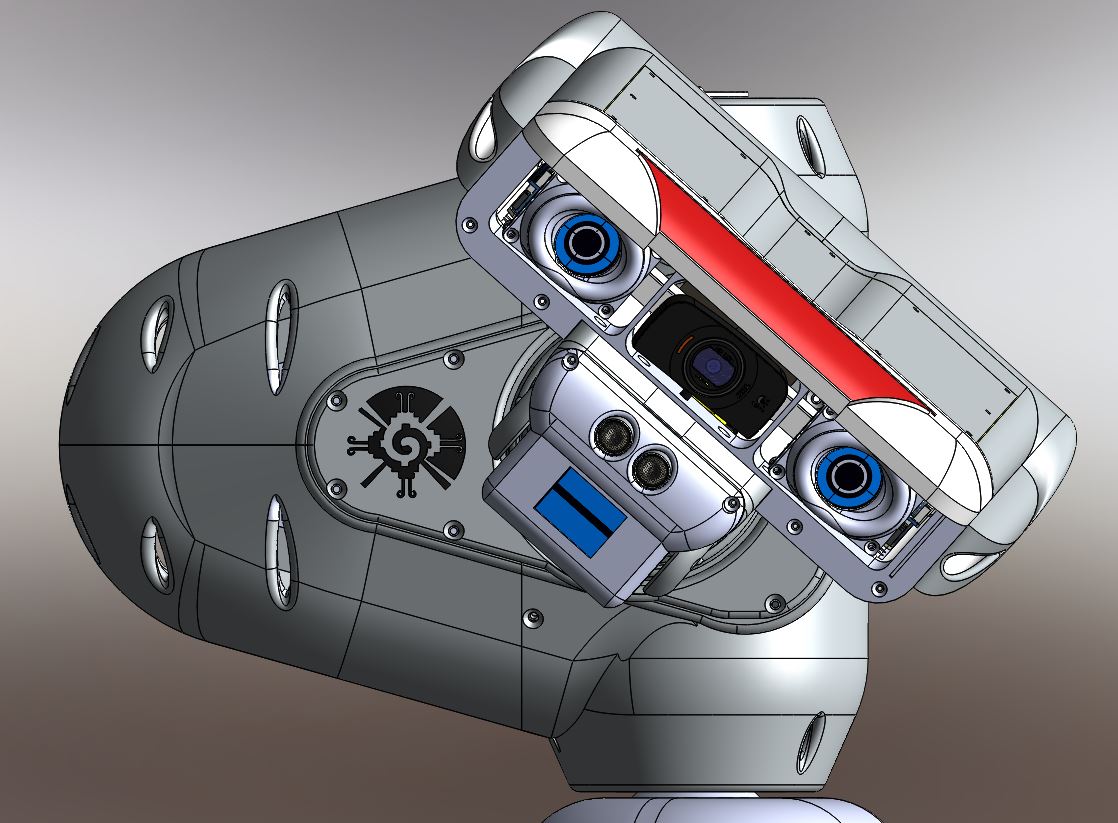
10/12/2016 Mise au point du système de vision pour la partie mécanique |
| Retour au sommaire |
![]()
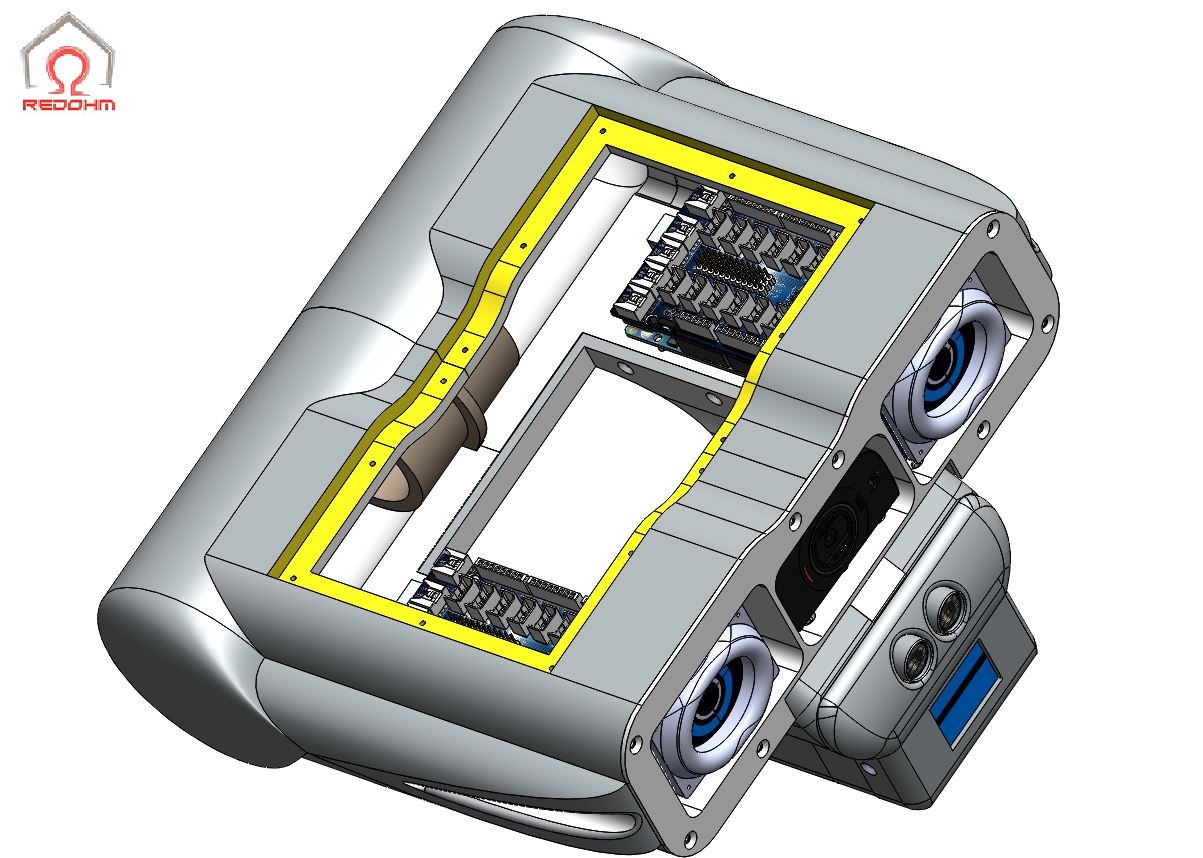
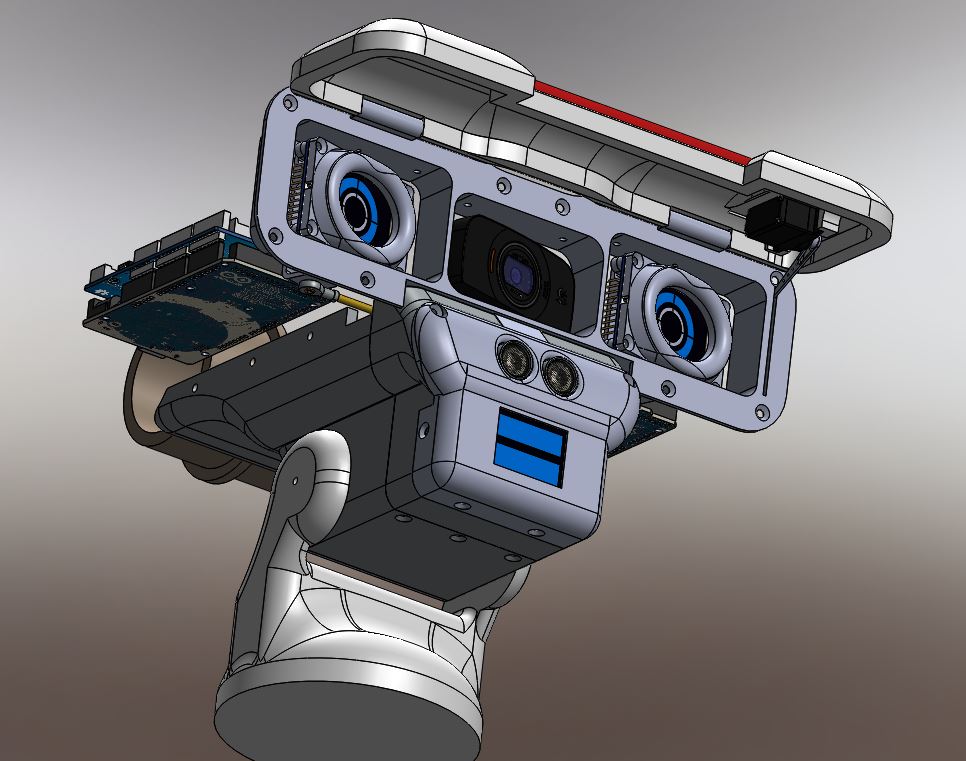
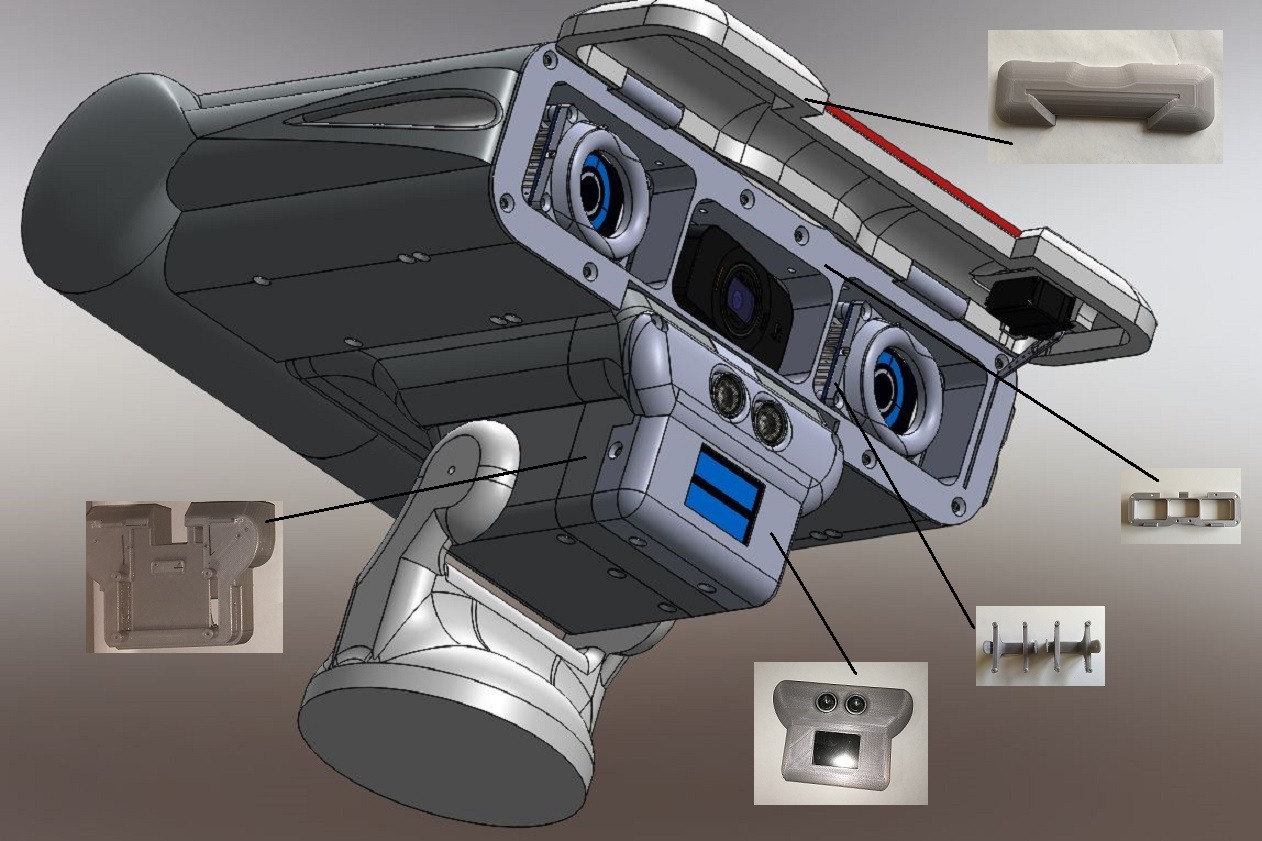
18/01/2017 Modification de l’encéphale |
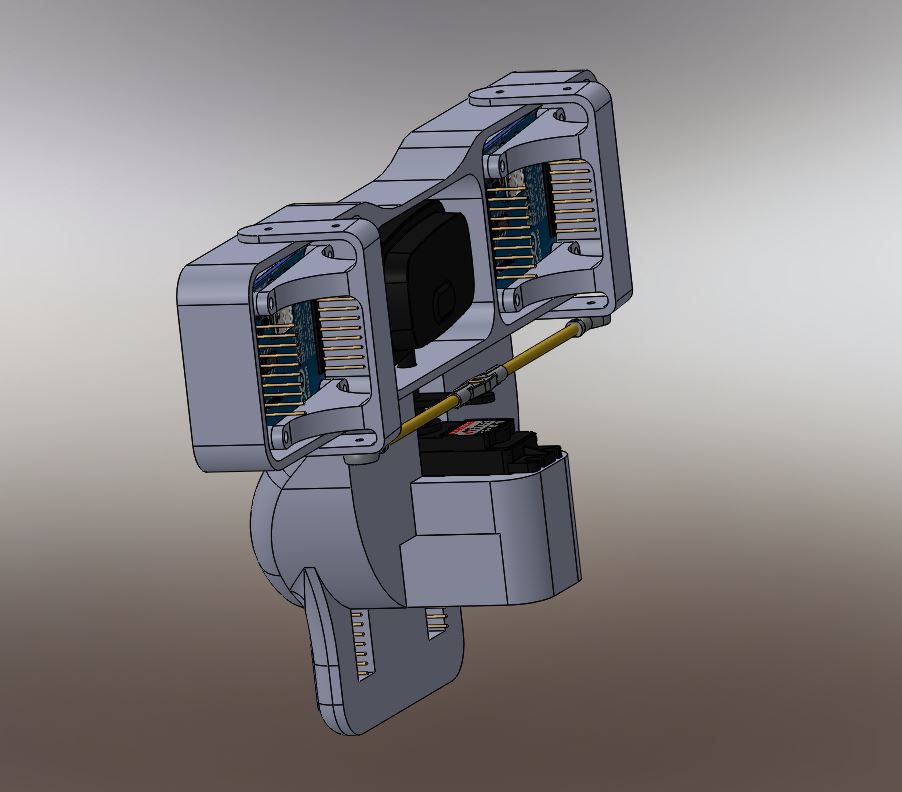
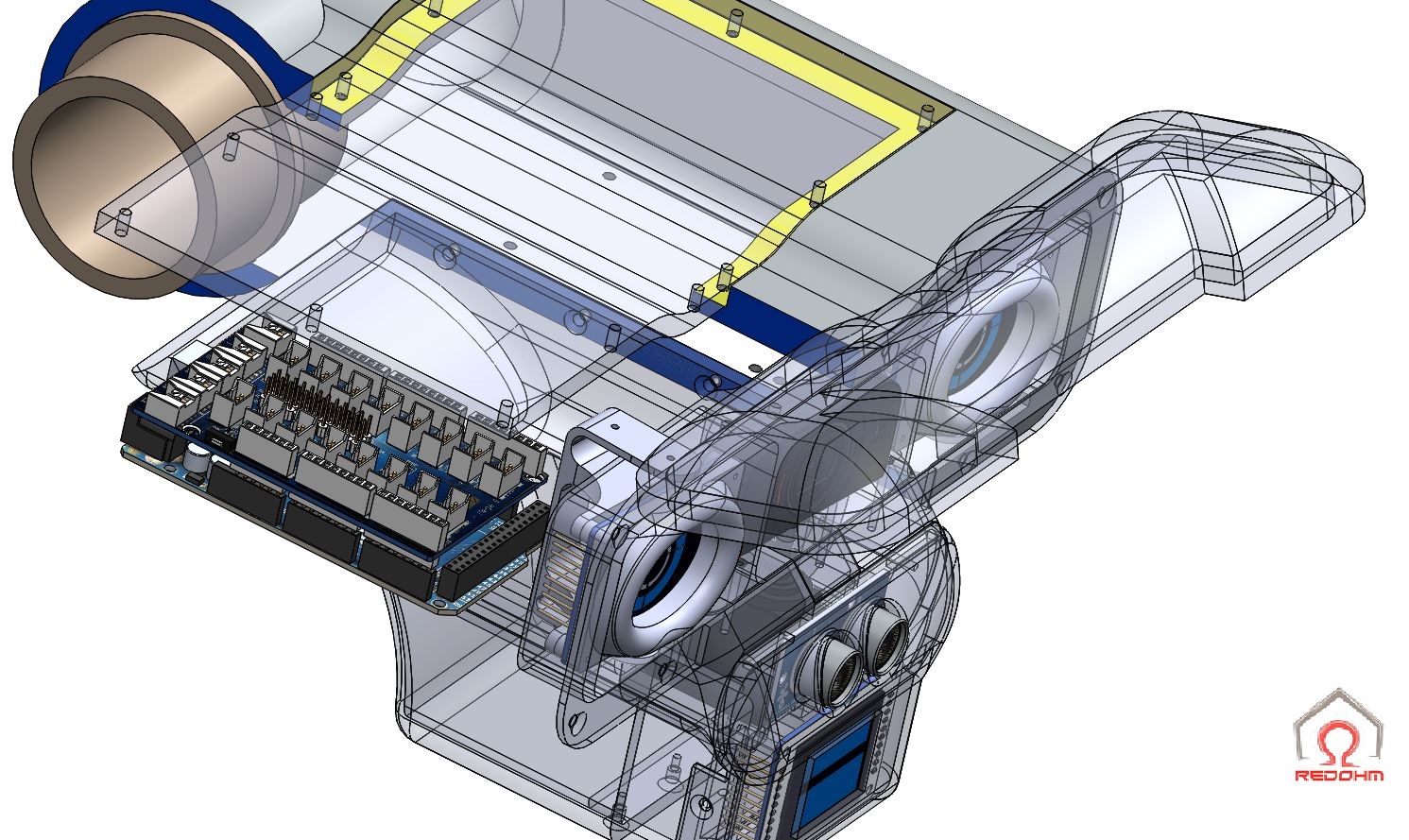
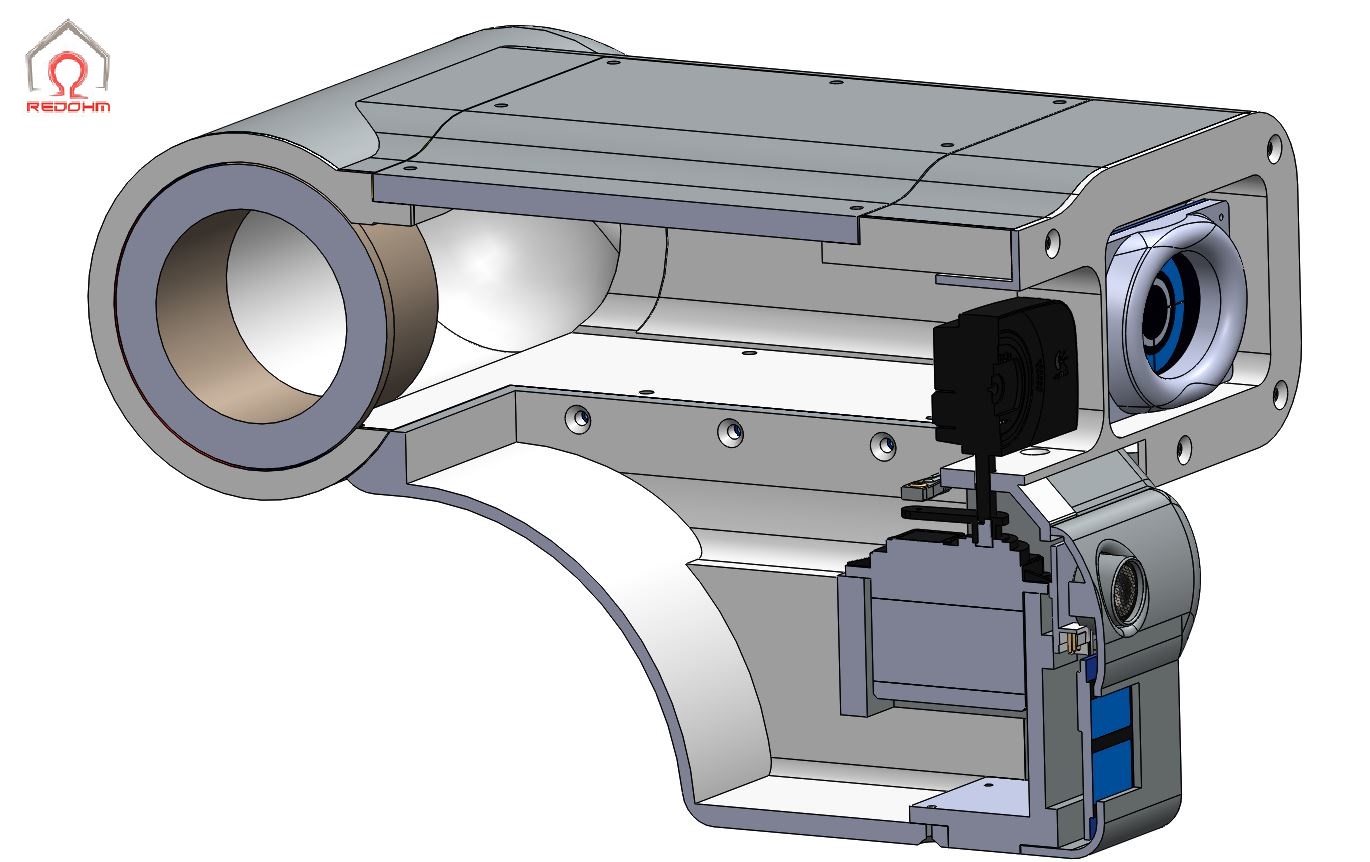
Nous avons modifié la partie de l’encéphale mais il faut savoir que les versions 1.00 ou 2 .00 sont compatibles avec le reste des ensembles du robot Maya .Ces modifications ont pour but d’améliorer la pose des cartes ainsi que le câblage de celle-ci. Les personnes qui ont déjà démarré la version 1.00 ne doivent pas s’inquiéter, l’ensemble de la version 1.00 est opérationnelle.
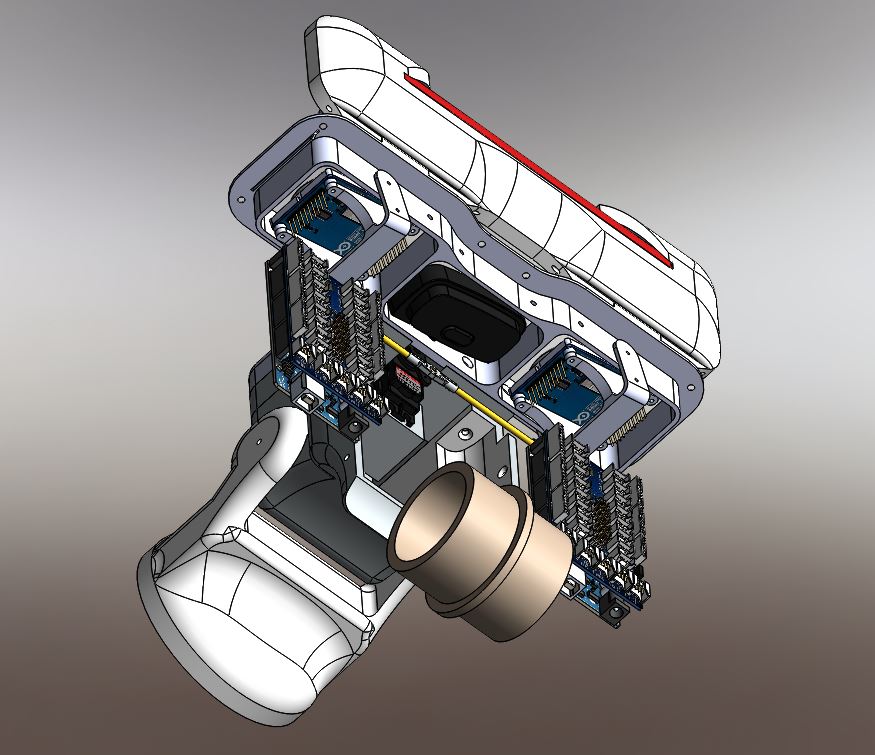
Ci-dessous une photo en coupe pour vous montrer le support carte Arduino , alors que dans la version 1.00 les cartes étaient visées sur les côtés de la boite crânienne
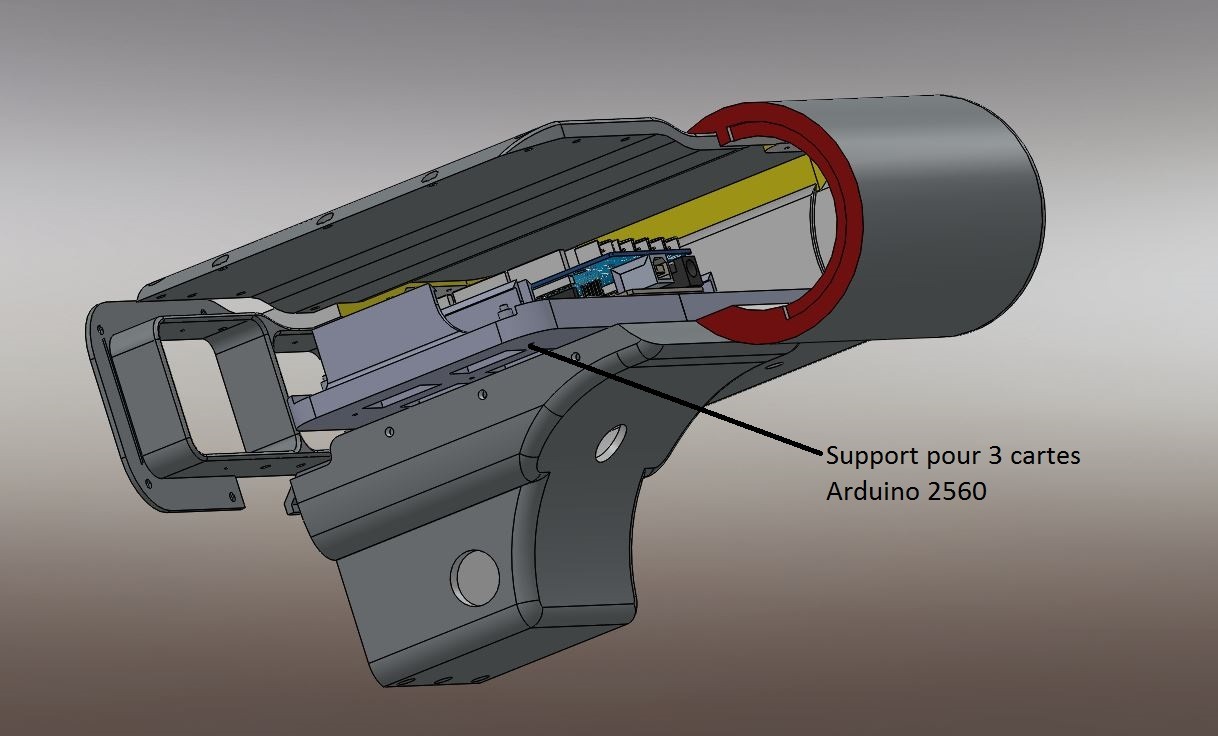
Encéphale avec support carte pour Arduino – RedOhm
Modification et renforcement de la partie fixation de la face avant
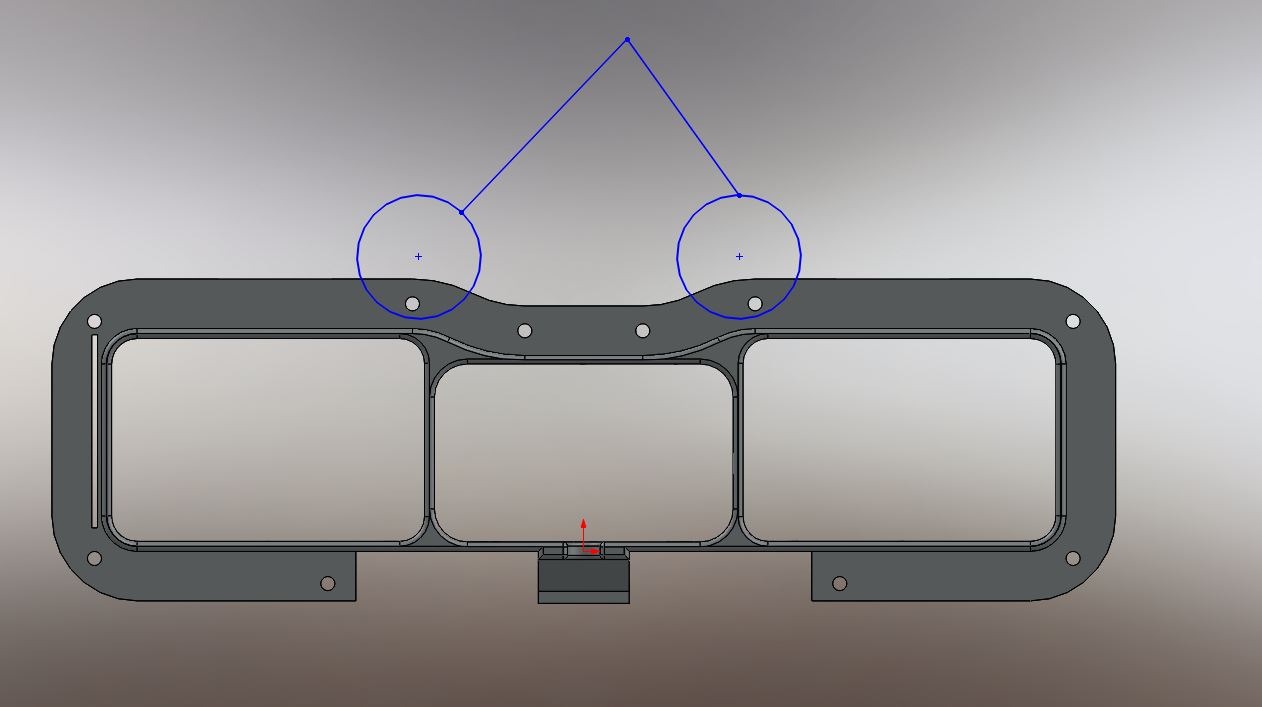
Robot Maya cache face avant renfort de la partie fixation RedOhm
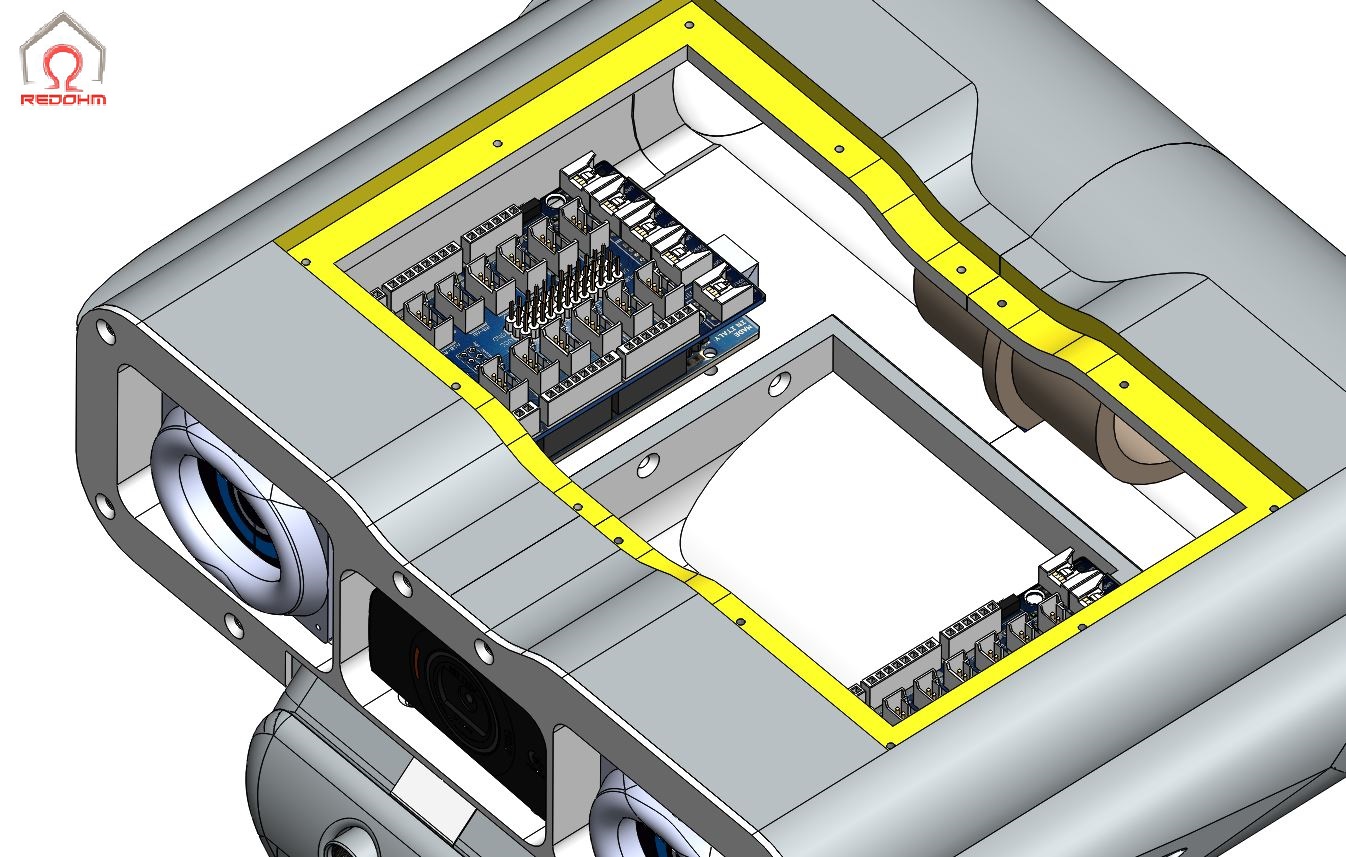
L’ouverture d’accès de l’encéphale agrandit de Maya pour la pose et le câblage des cartes Arduino
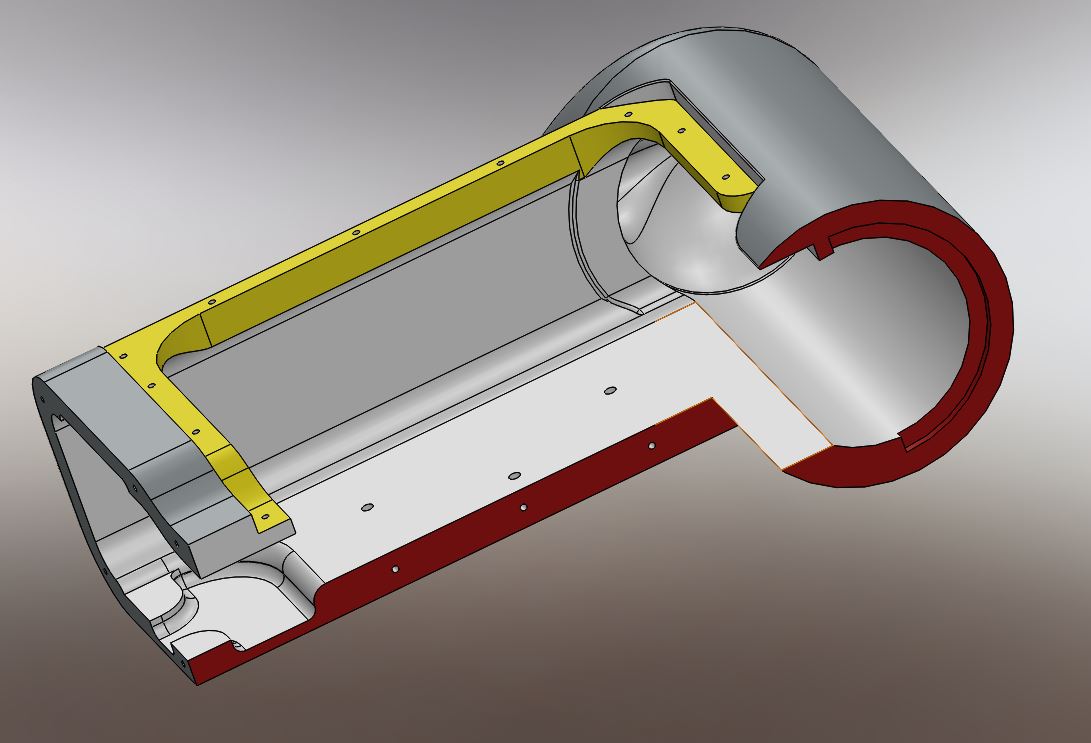
L’ouverture d’accès de l’encéphale agrandit de Maya – RedOhm
Nouveau capot suite aux modifications de l’ouverture. 2 versions de ce capot seront disponibles. Une pour les imprimantes 200*200*200 et une version pour les imprimantes avec un espace supérieur à celui précité.
Nouveau capot suite aux modification de l’ouverture – RedOhm
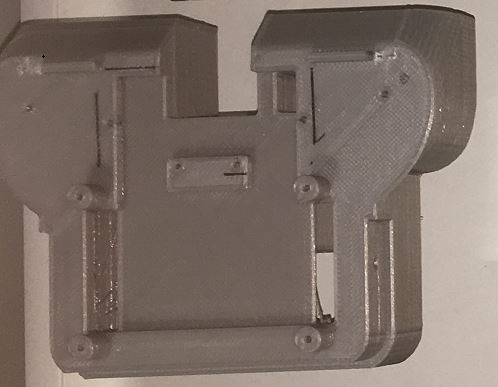
Pièce d’assemblage modifiée pour gagner de la place en vue du câblage des cartes électroniques
Pièce d’assemblage modifiée robot Maya – RedOhm
Modification seulement pour le rendu de la pièce
Modification seulement pour le rendu de la pièce – RedOhm
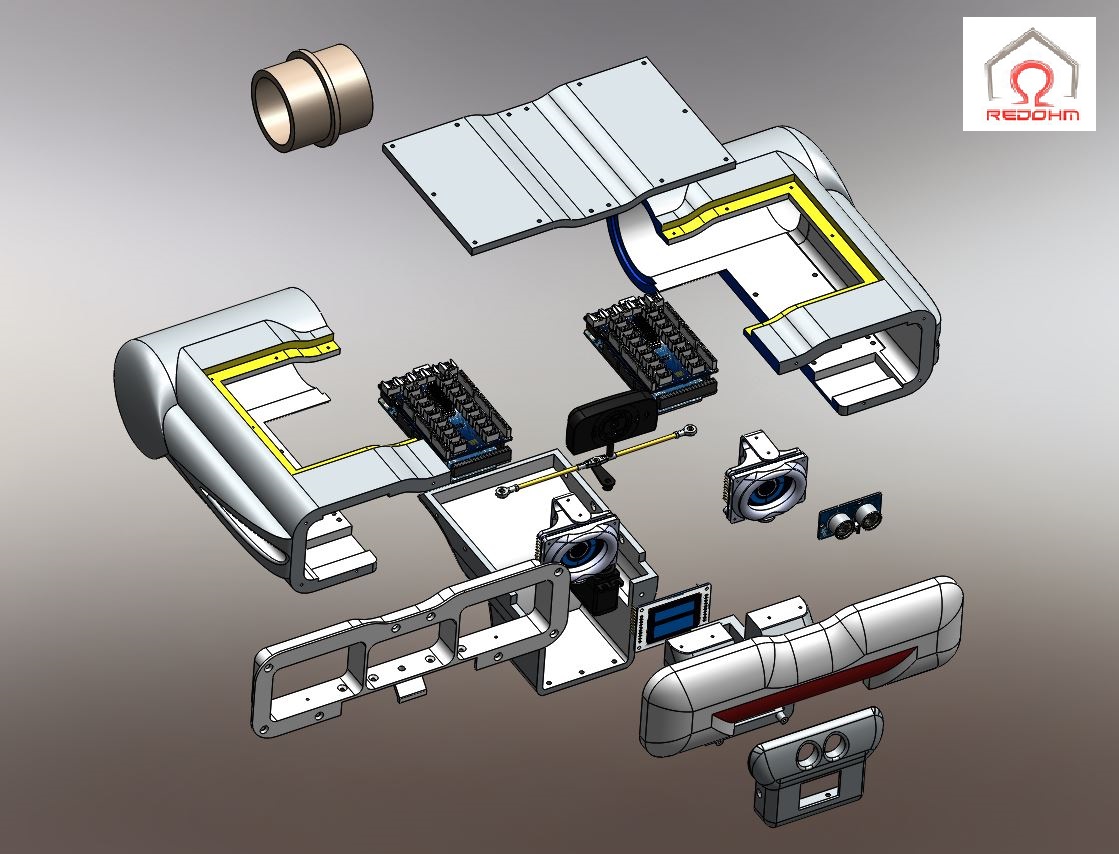
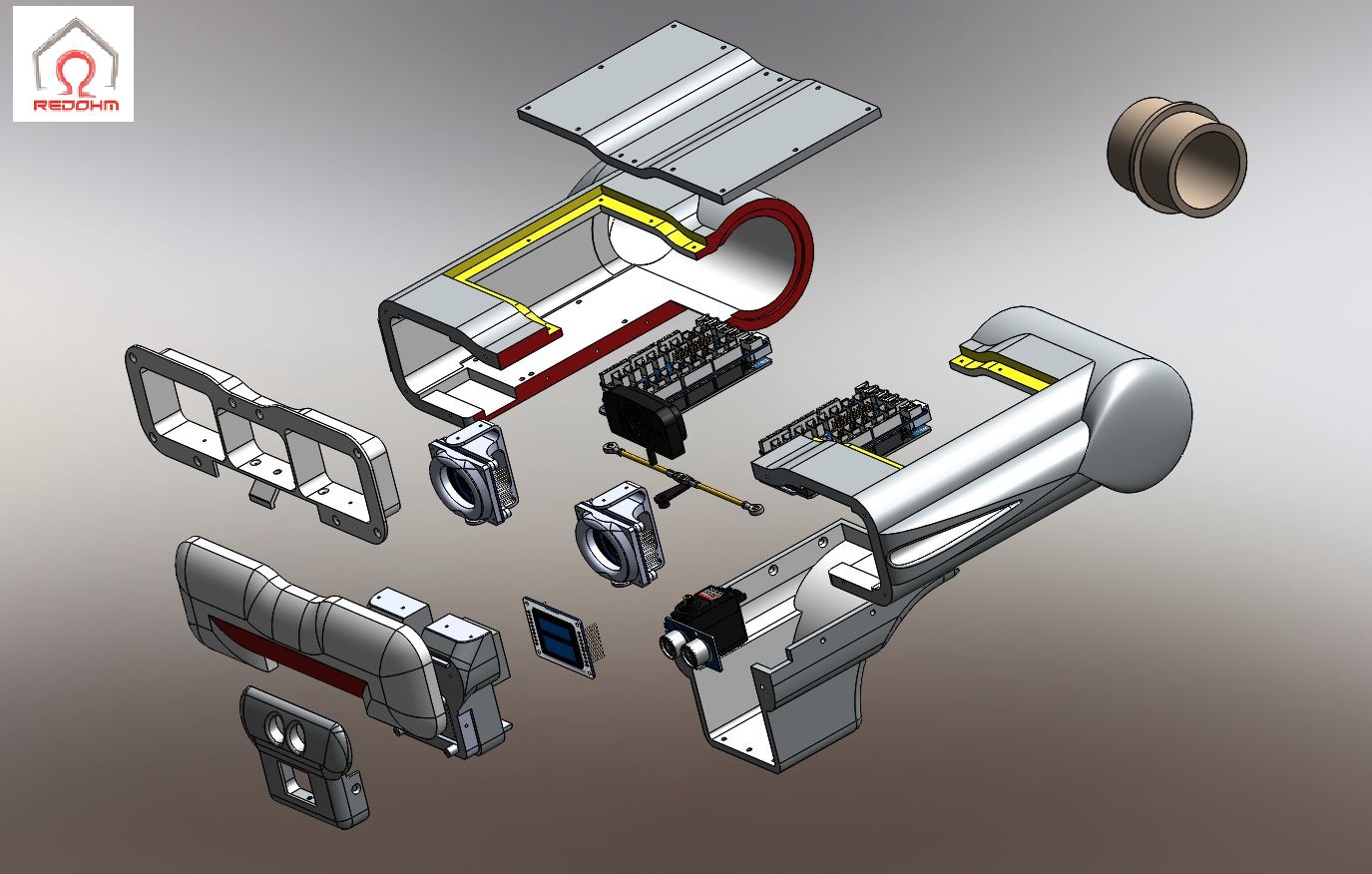
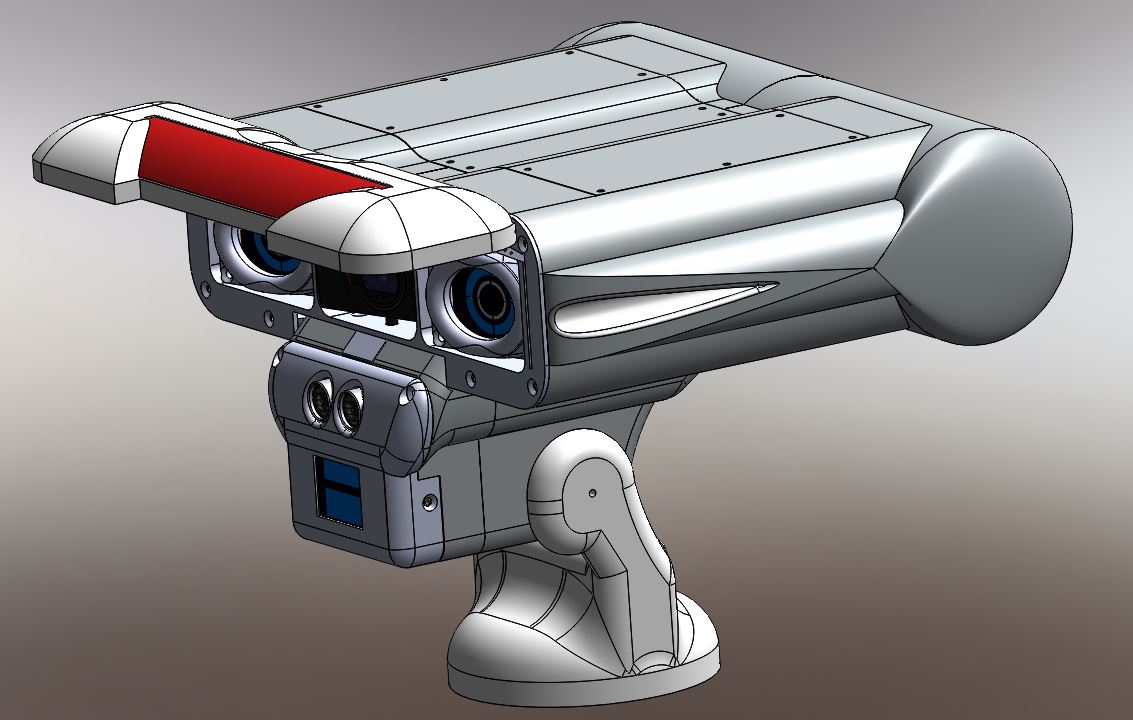
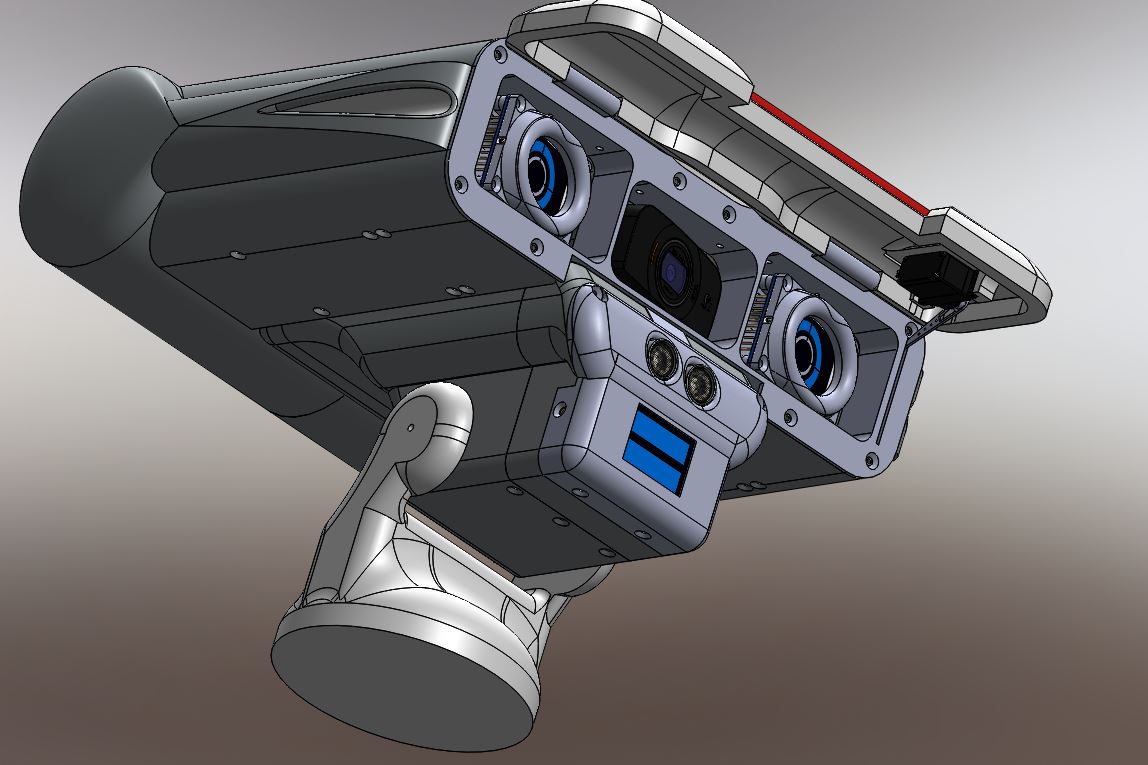
Aperçu de l’ensemble des modifications du robot Maya
Aperçu de l’ensemble des modifications – RedOhm
| Retour au sommaire |
![]()
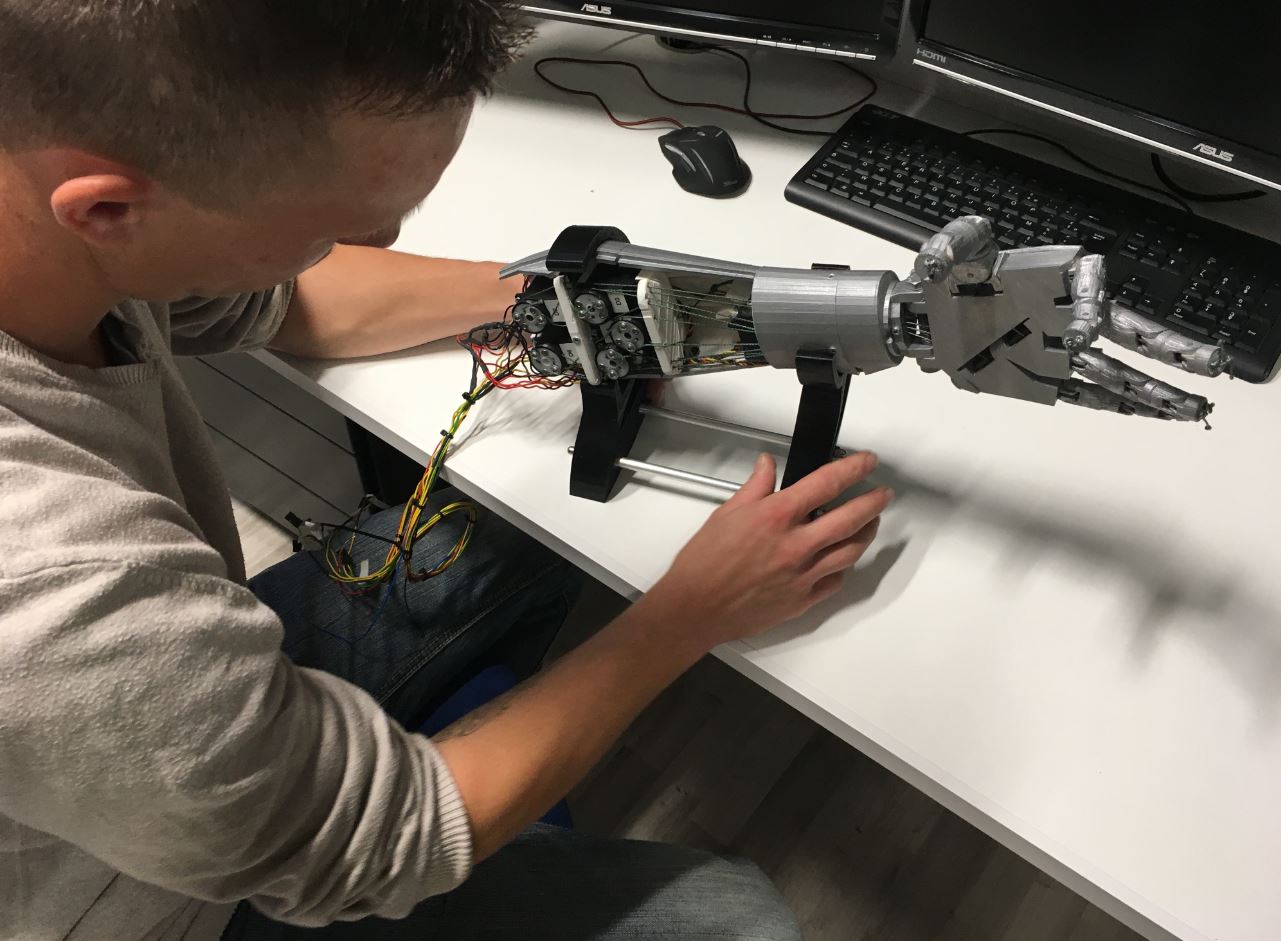
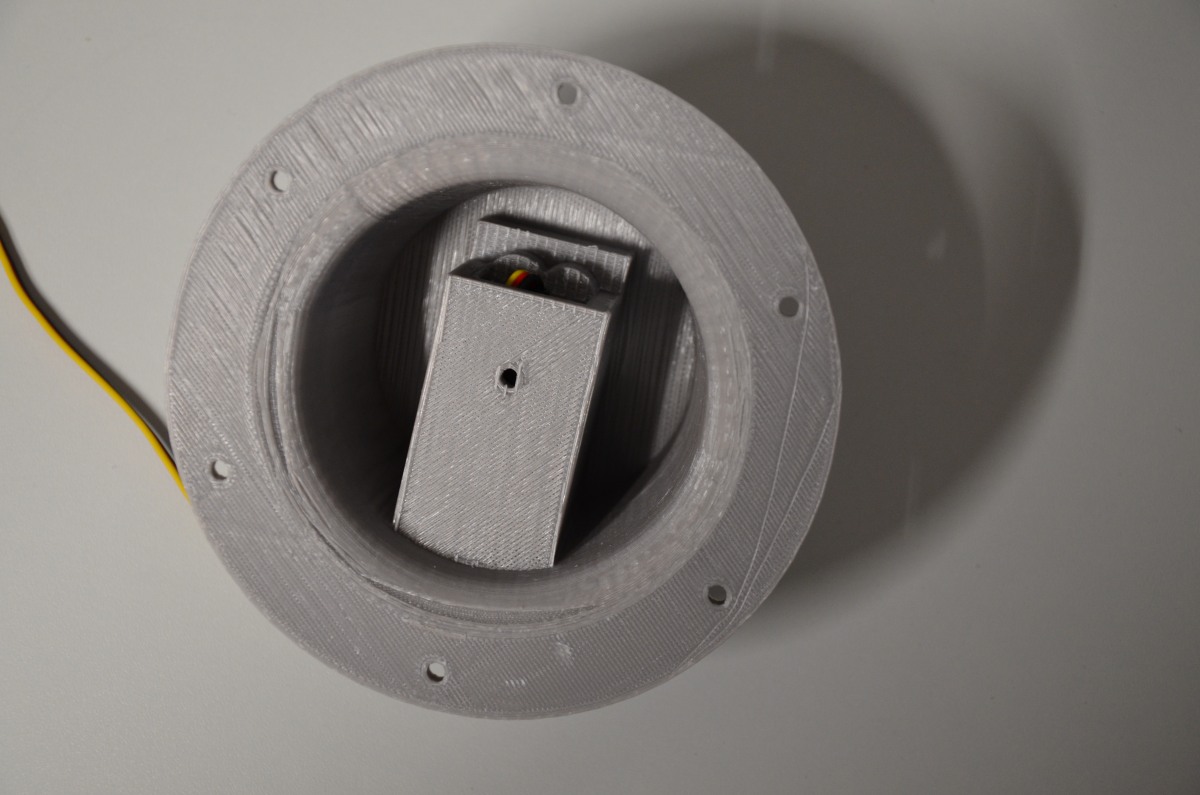
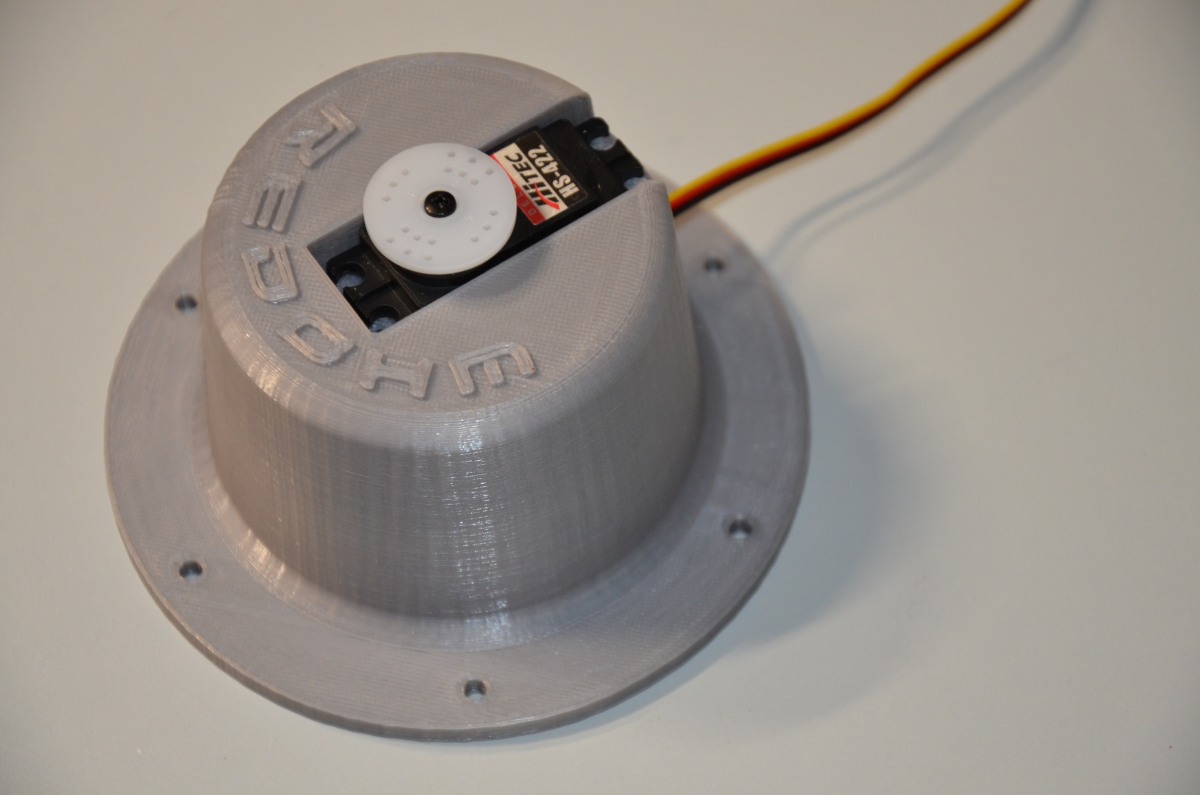
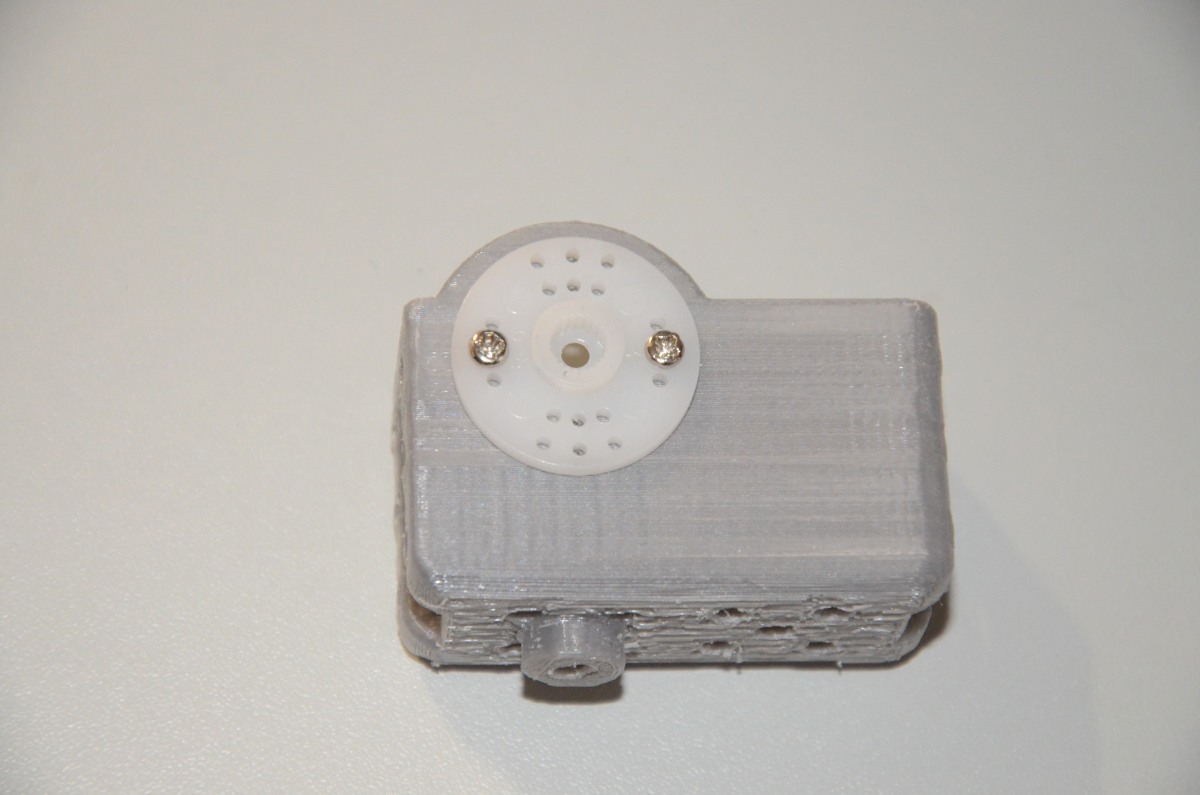
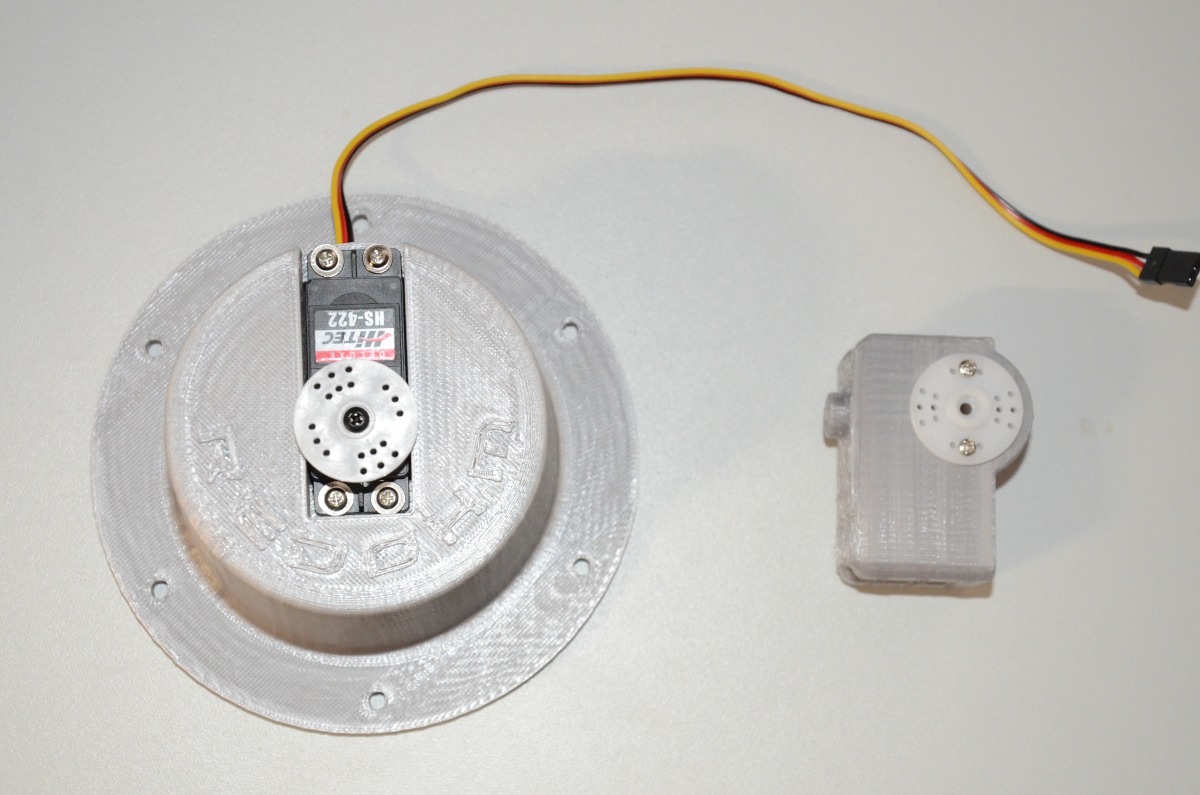
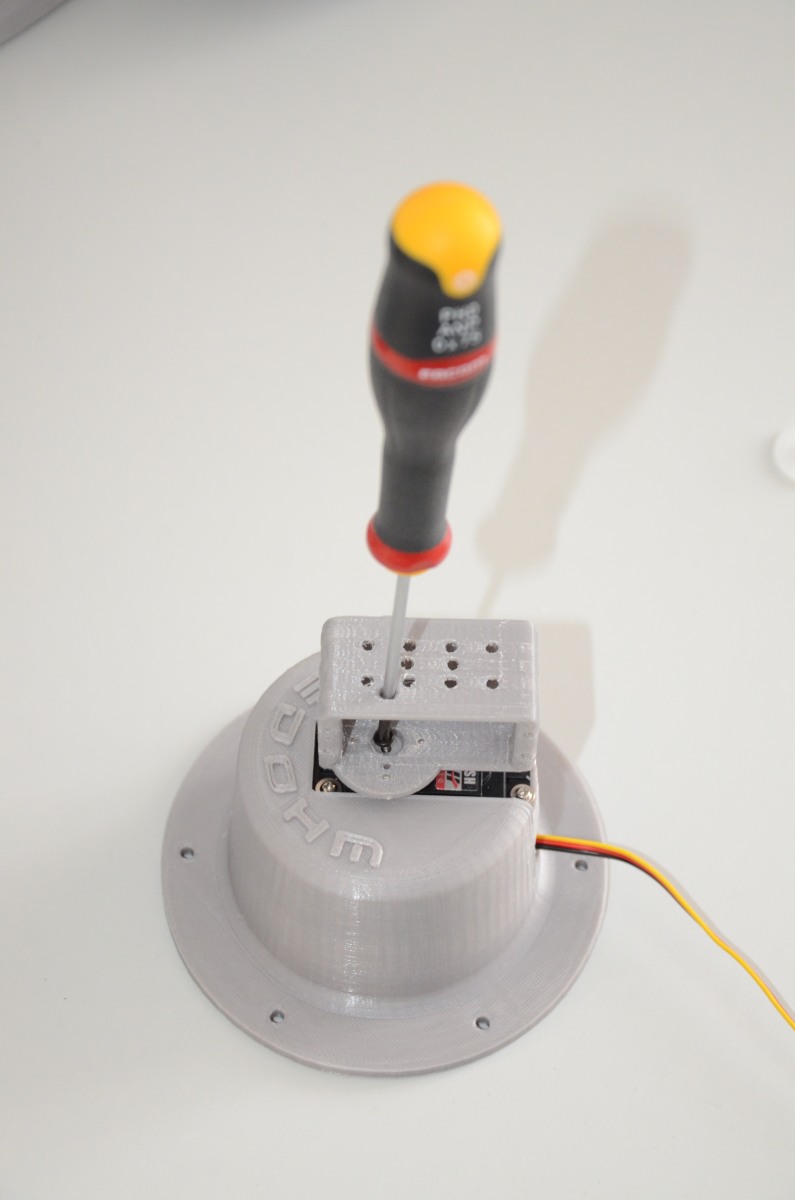
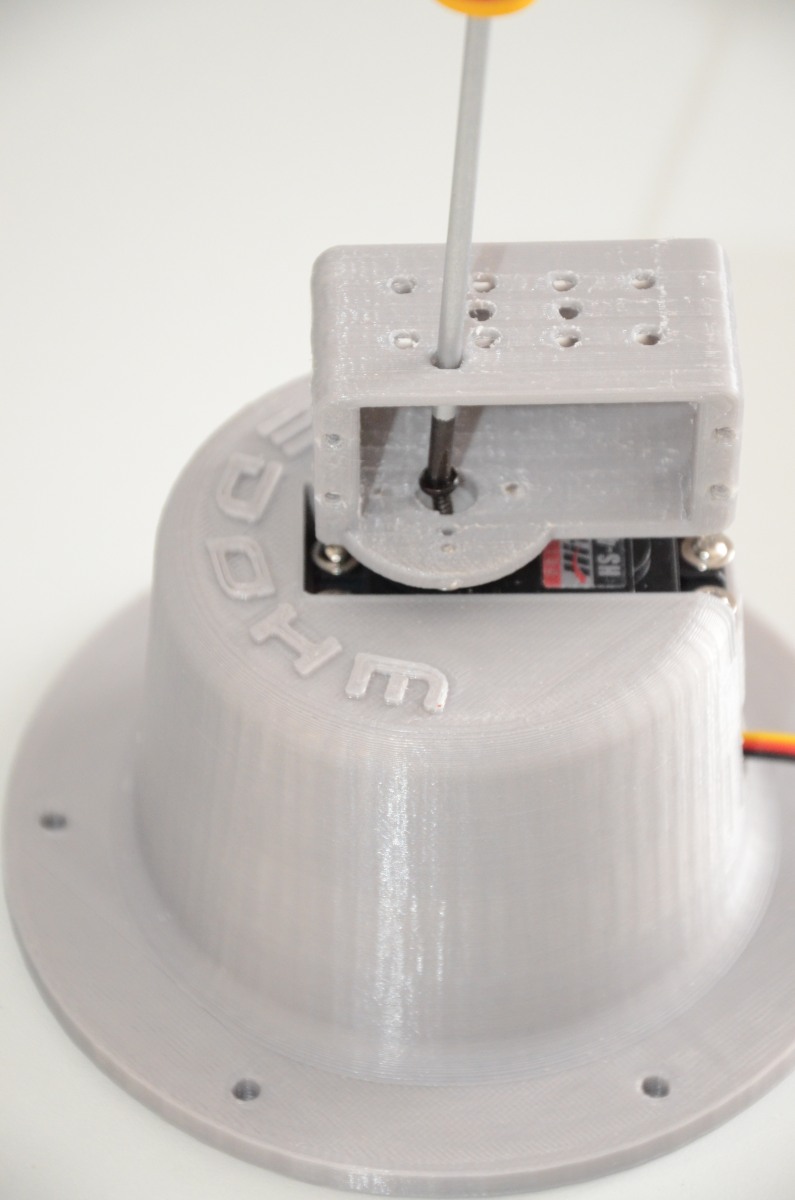
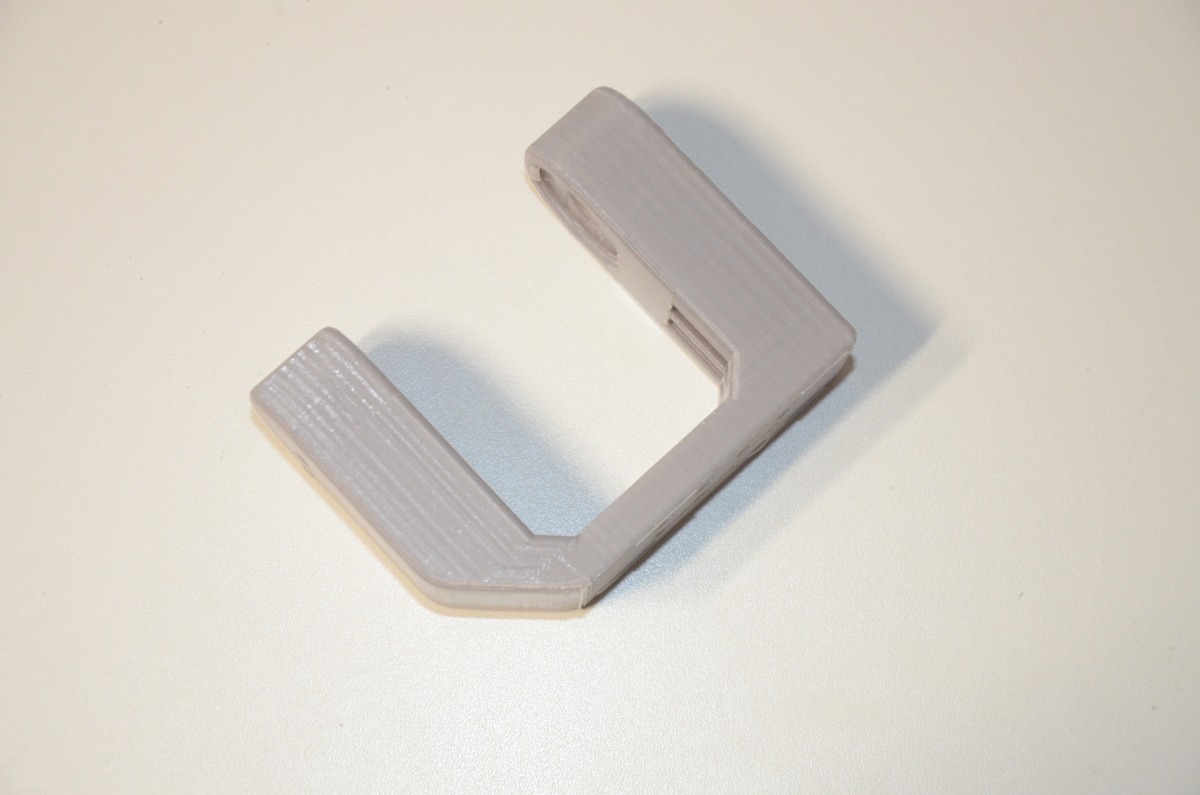
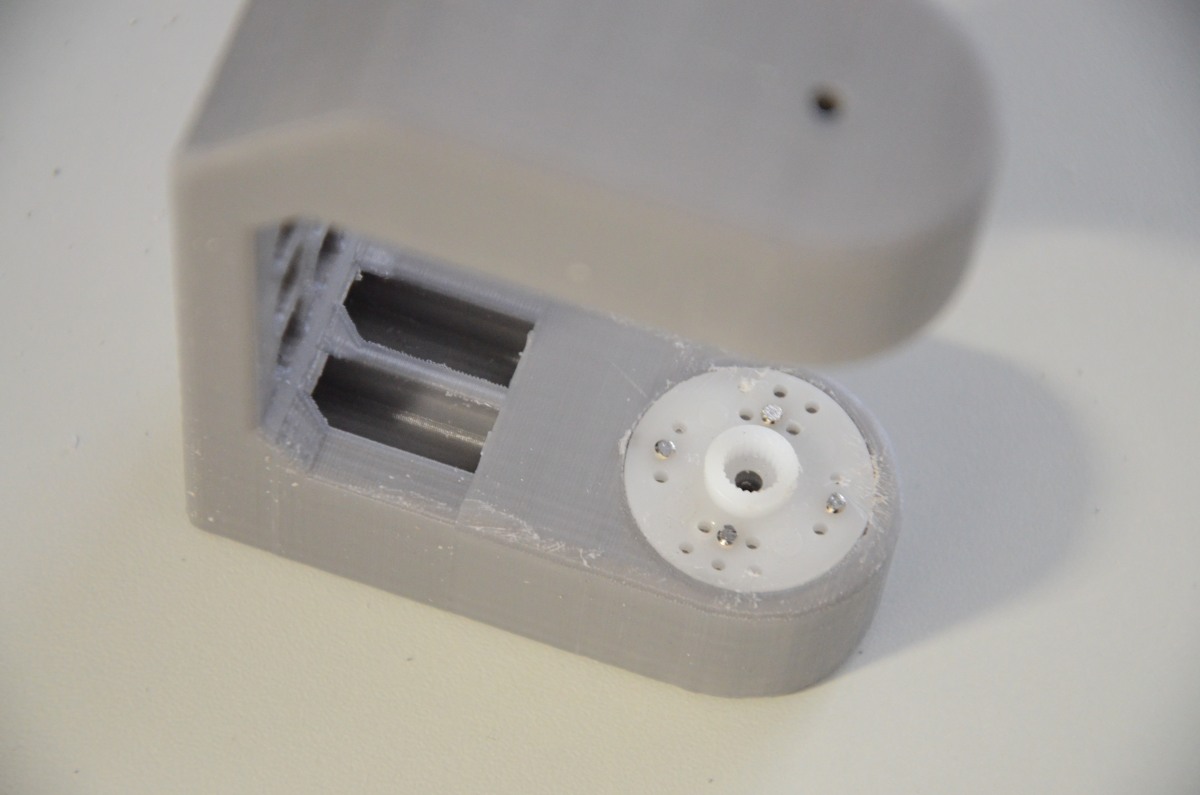
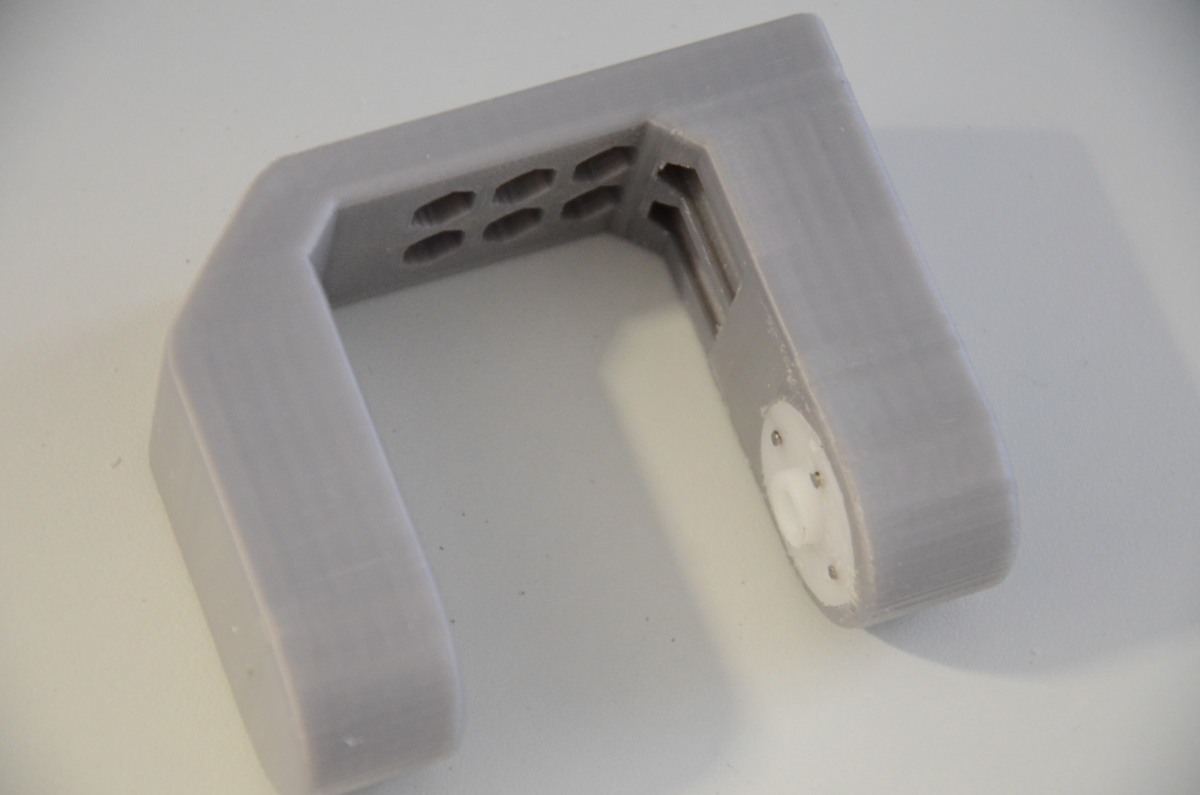
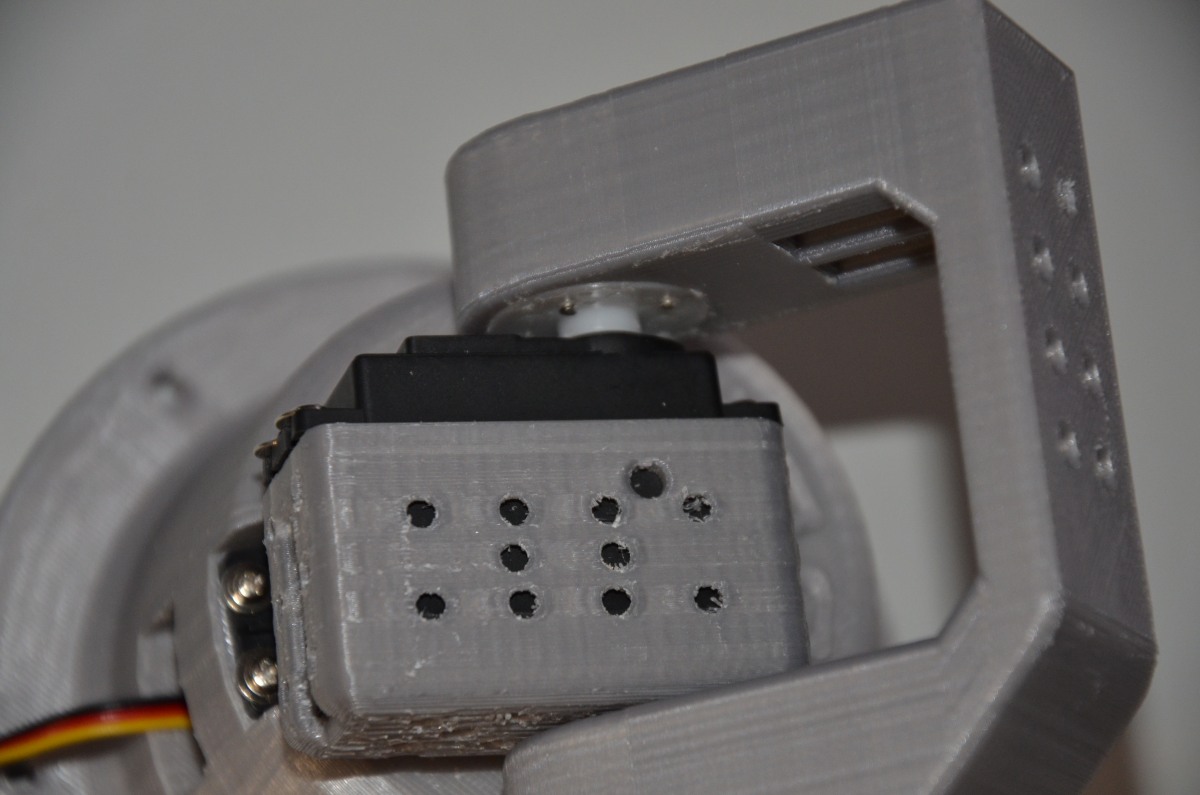
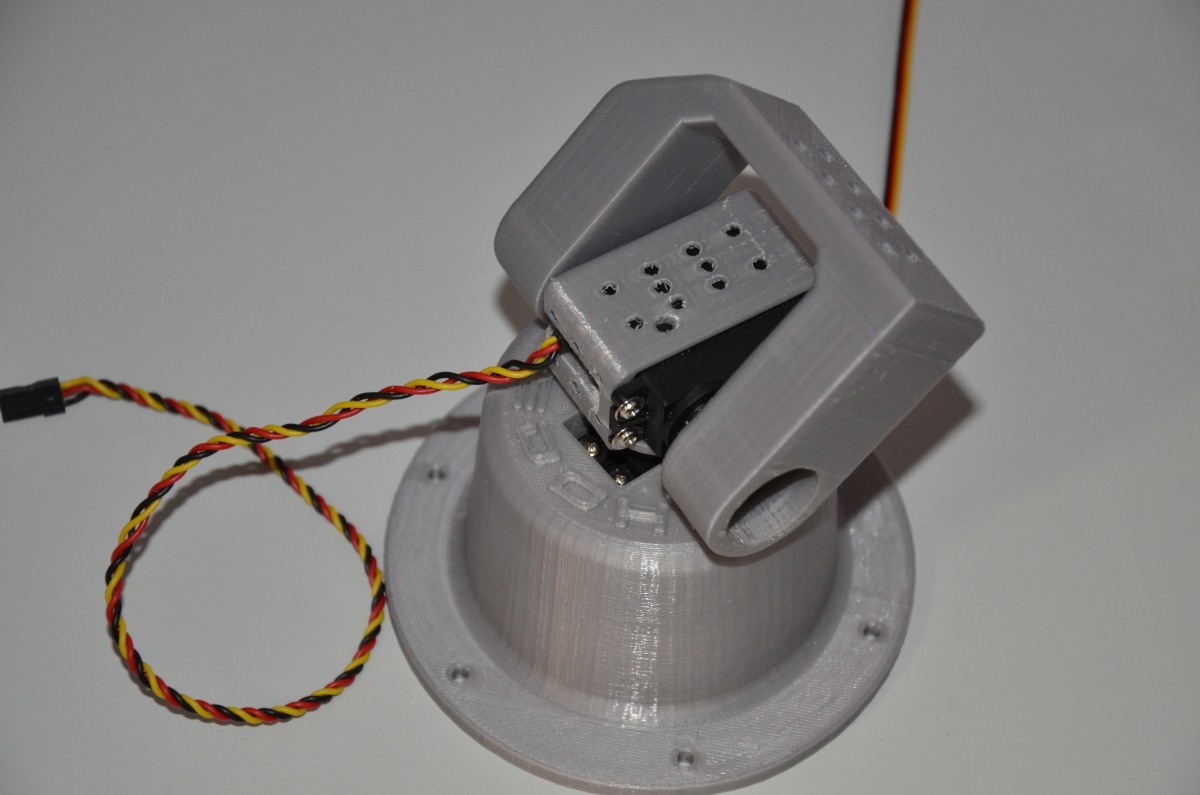
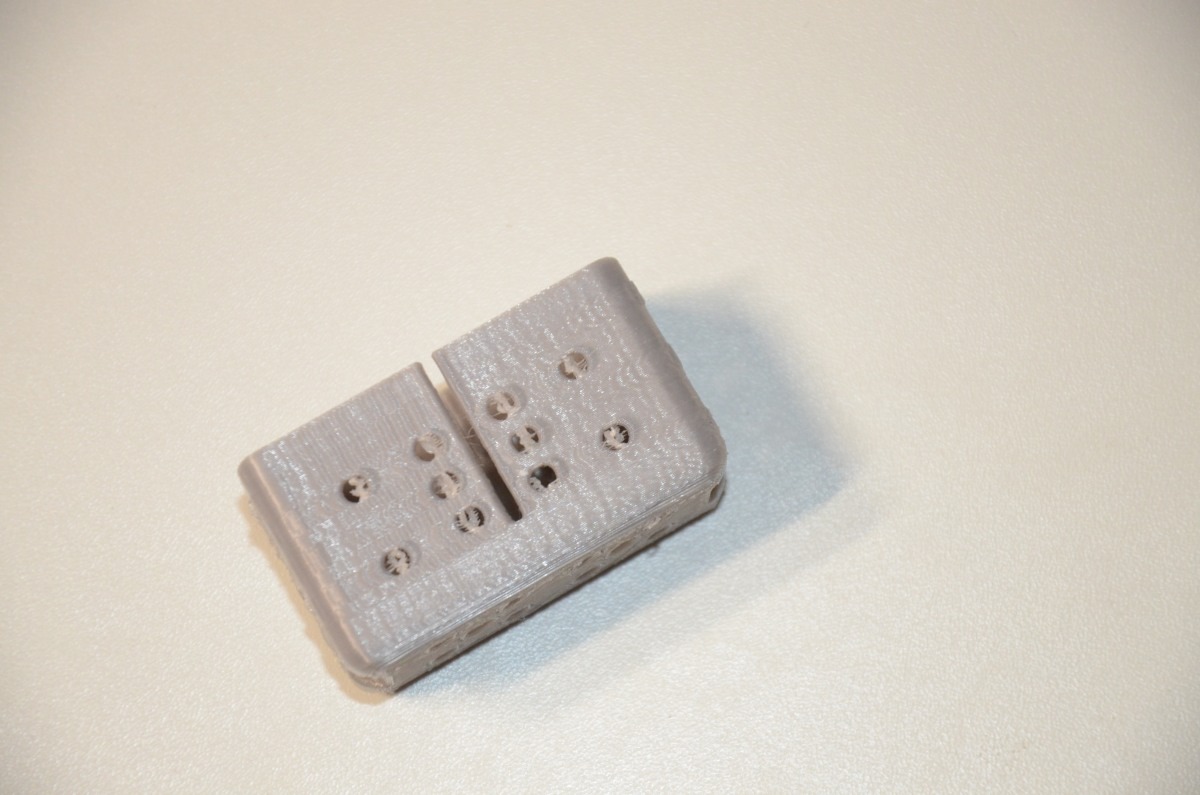
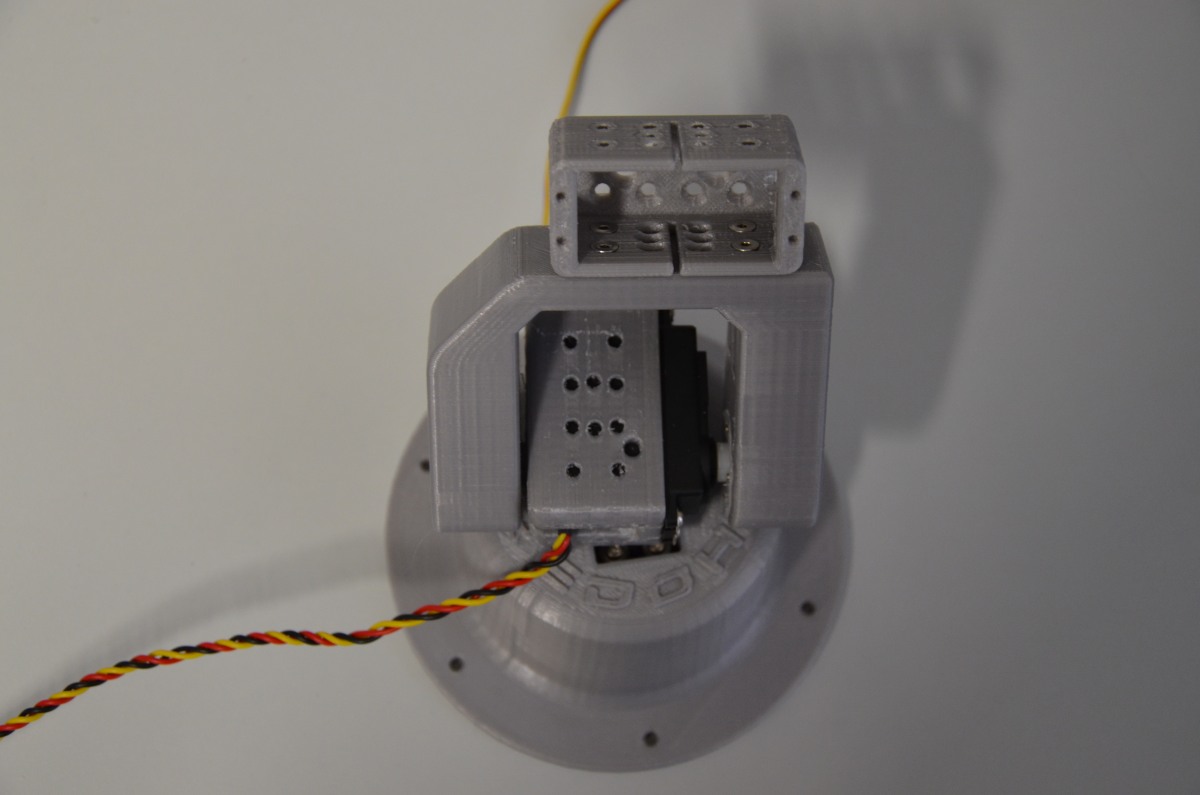
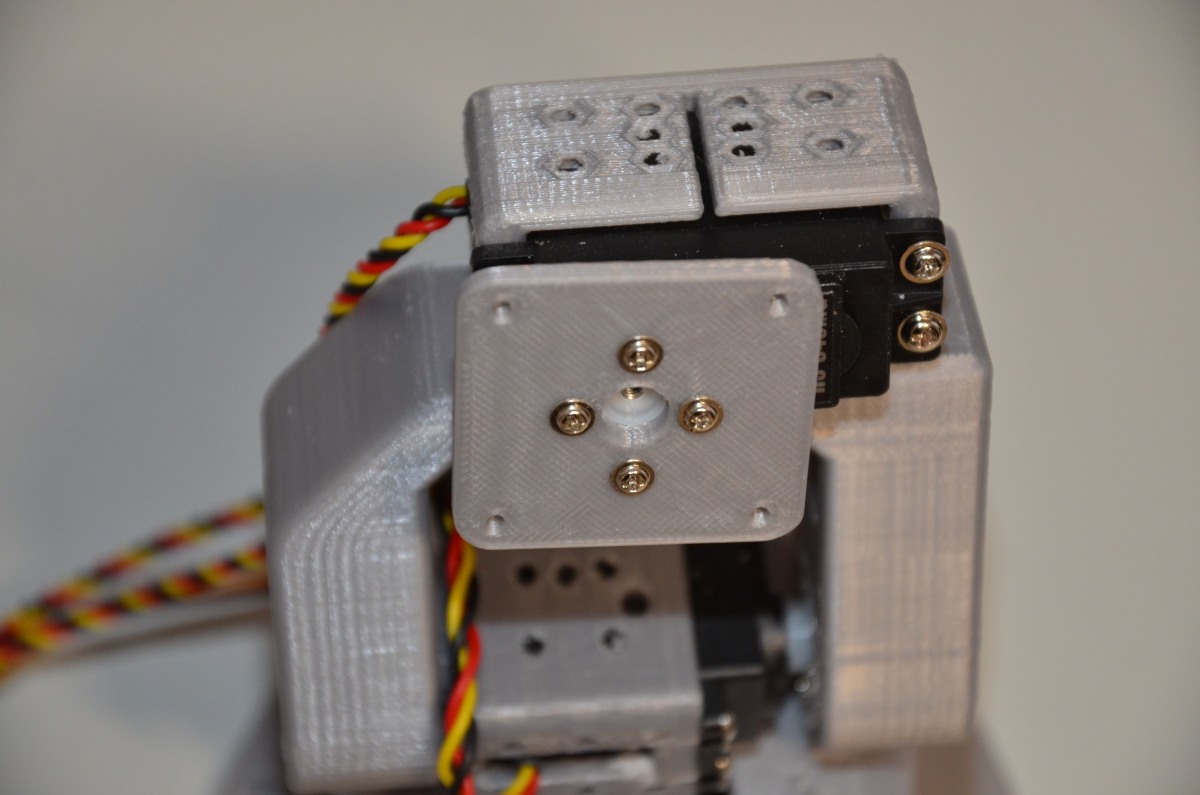
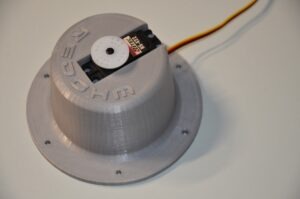
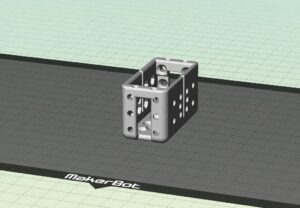
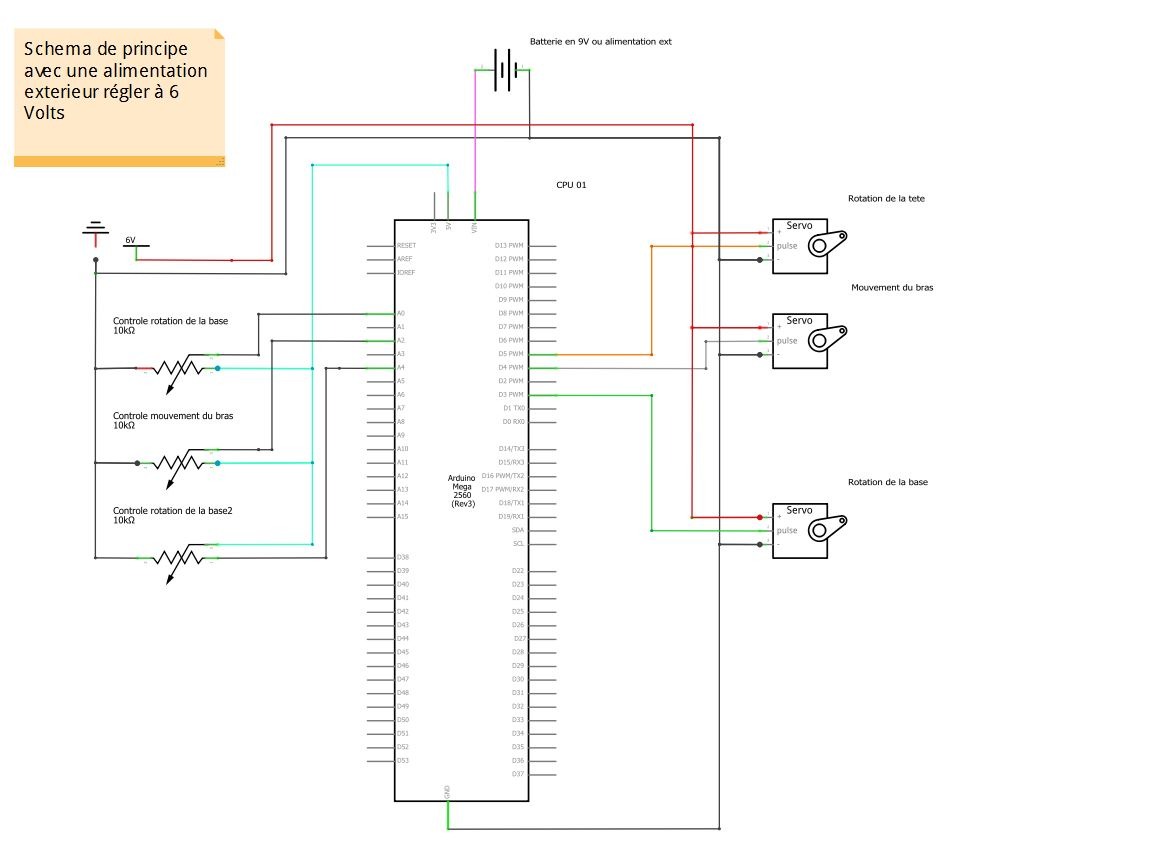
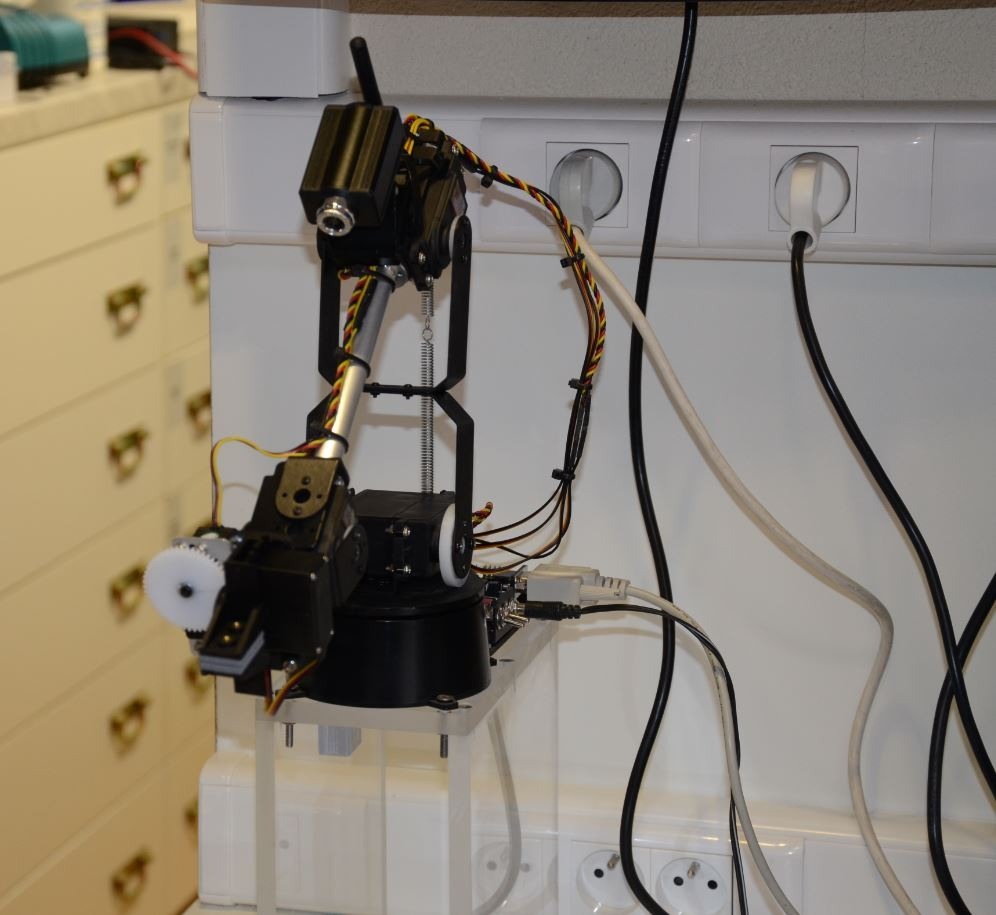
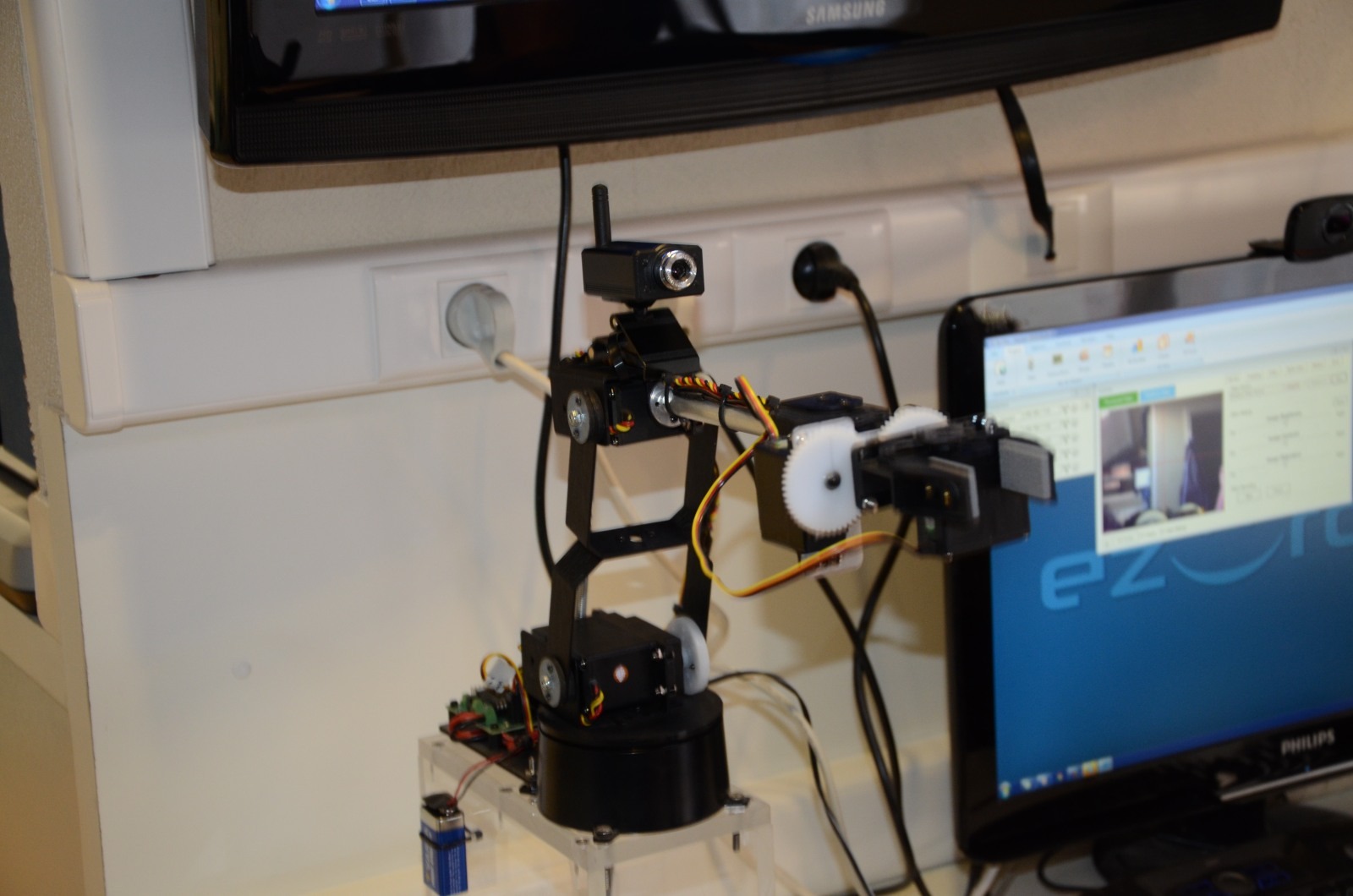
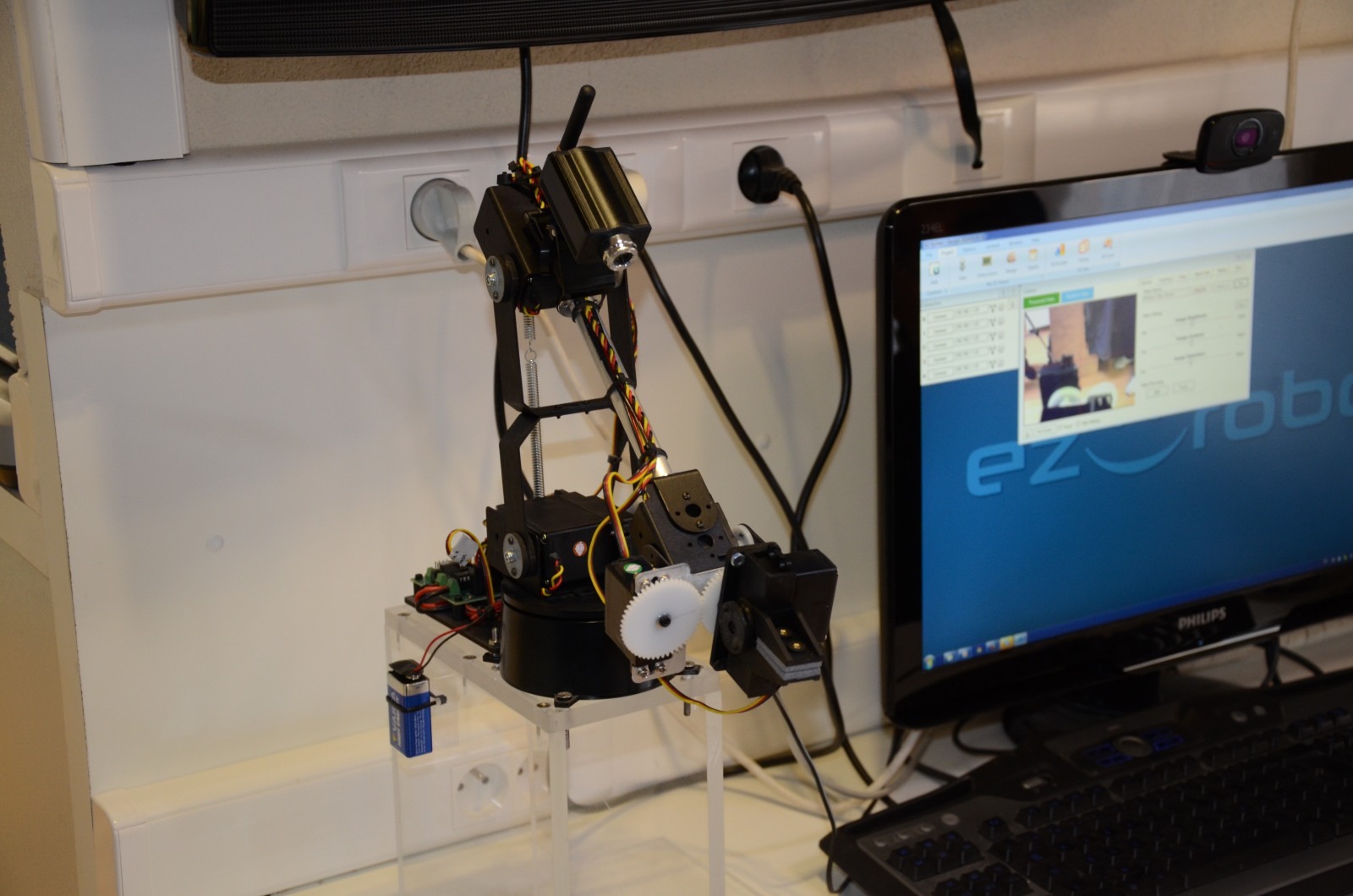
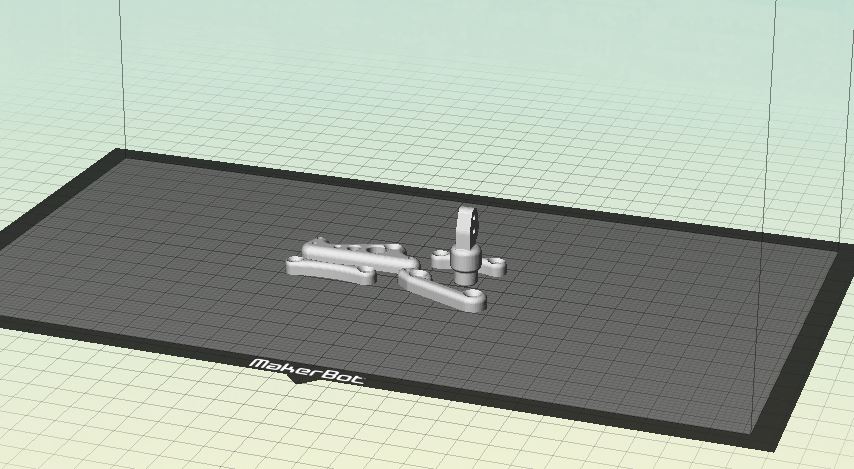
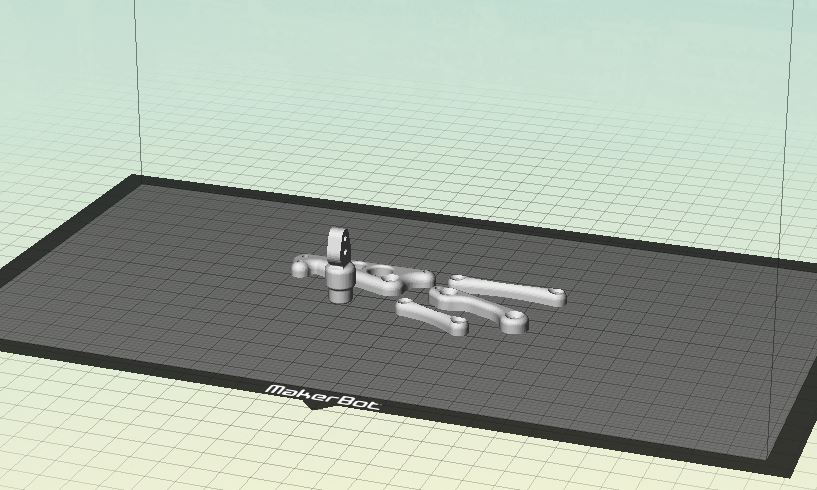
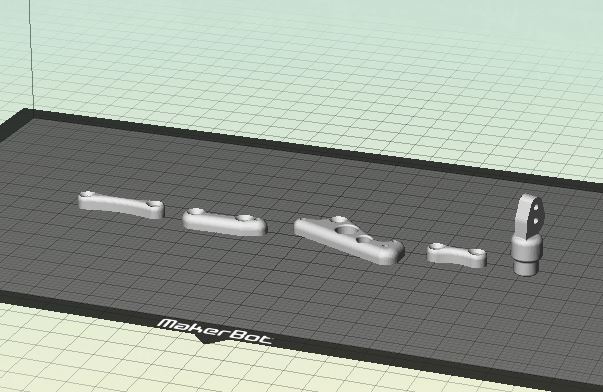
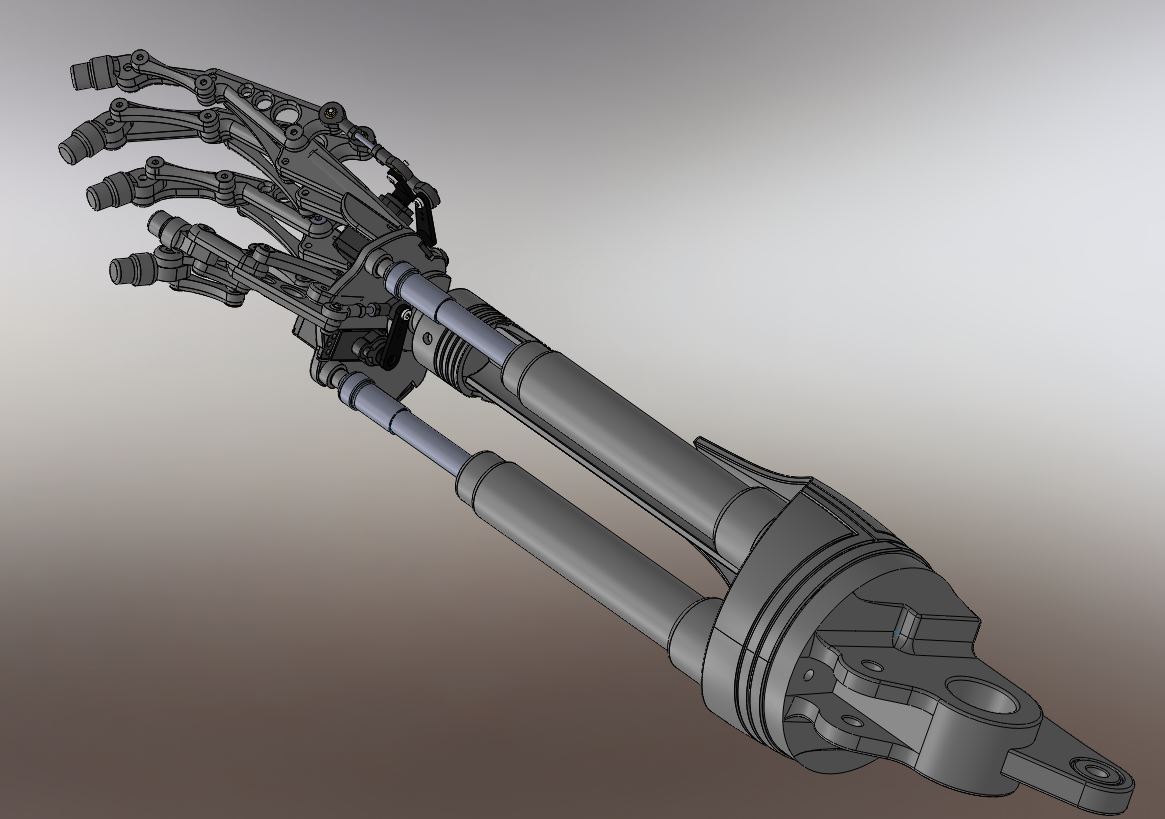
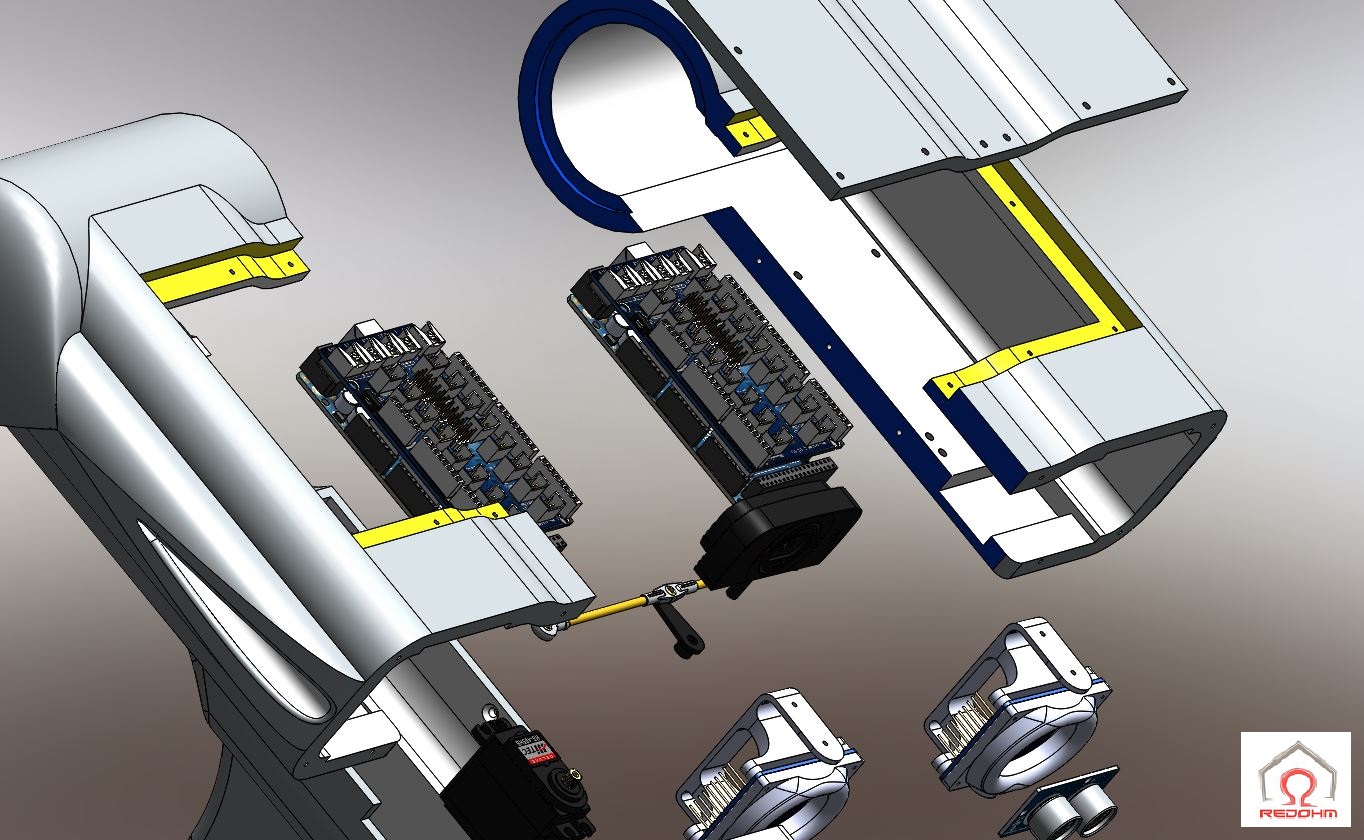
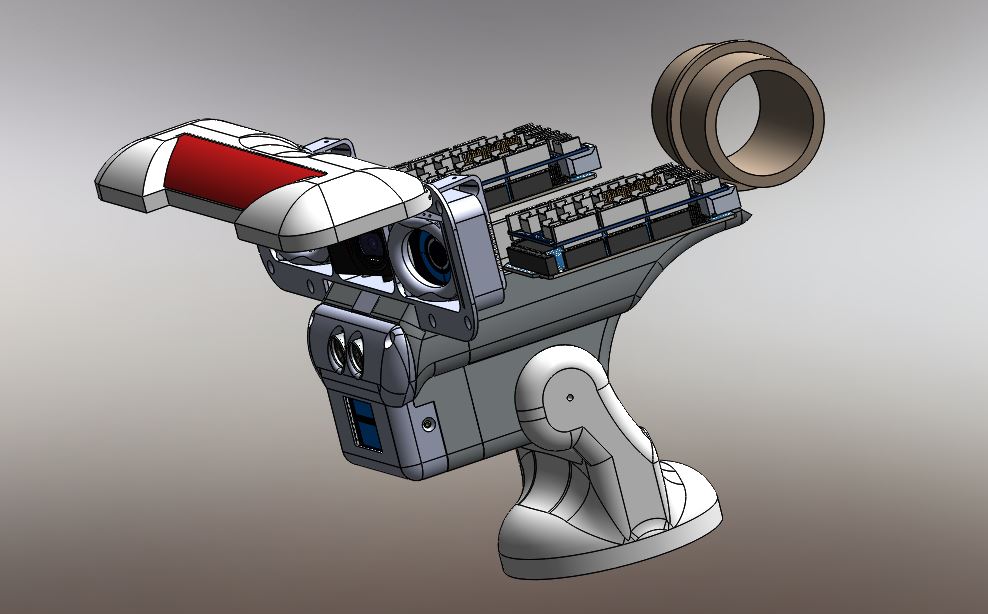
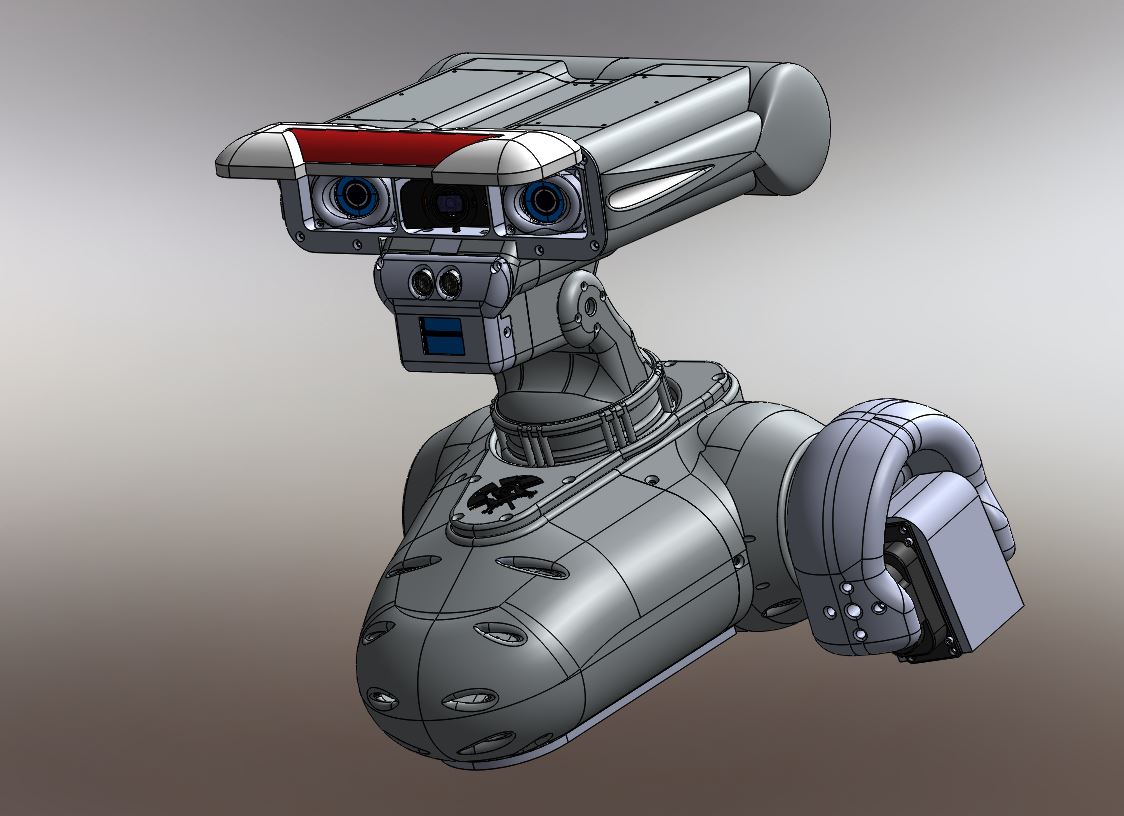
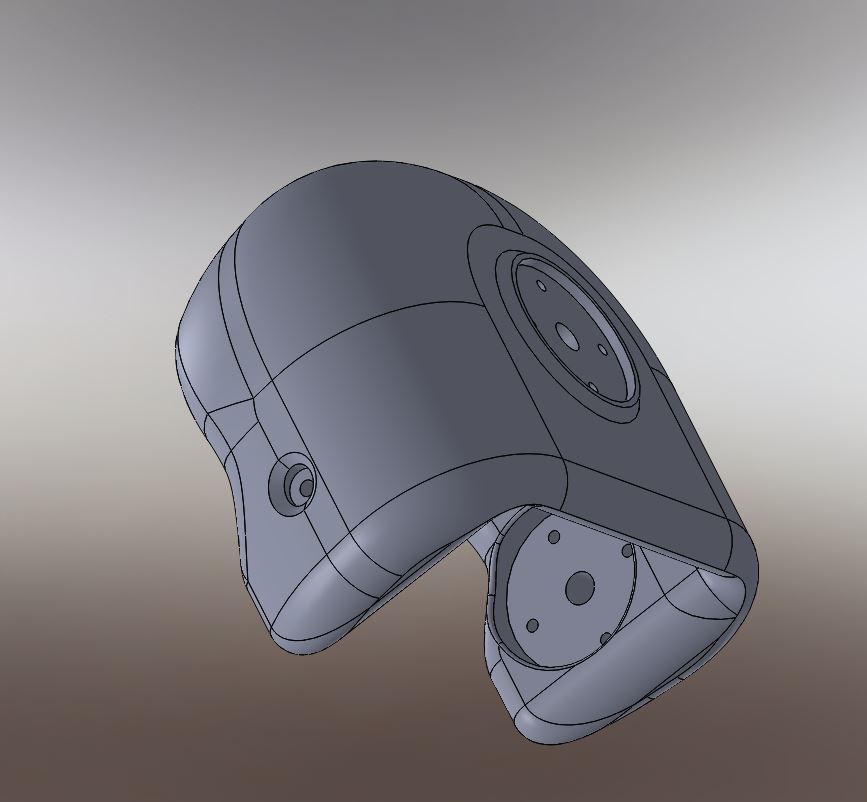
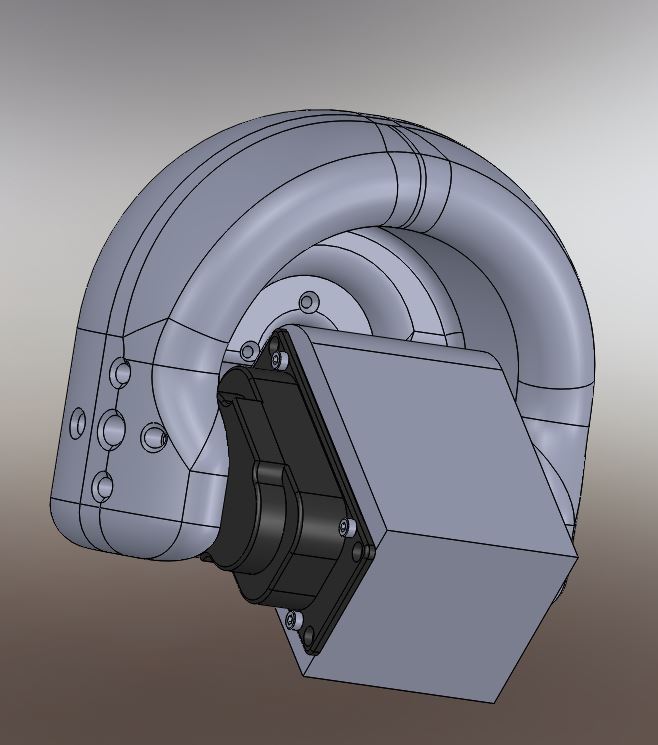
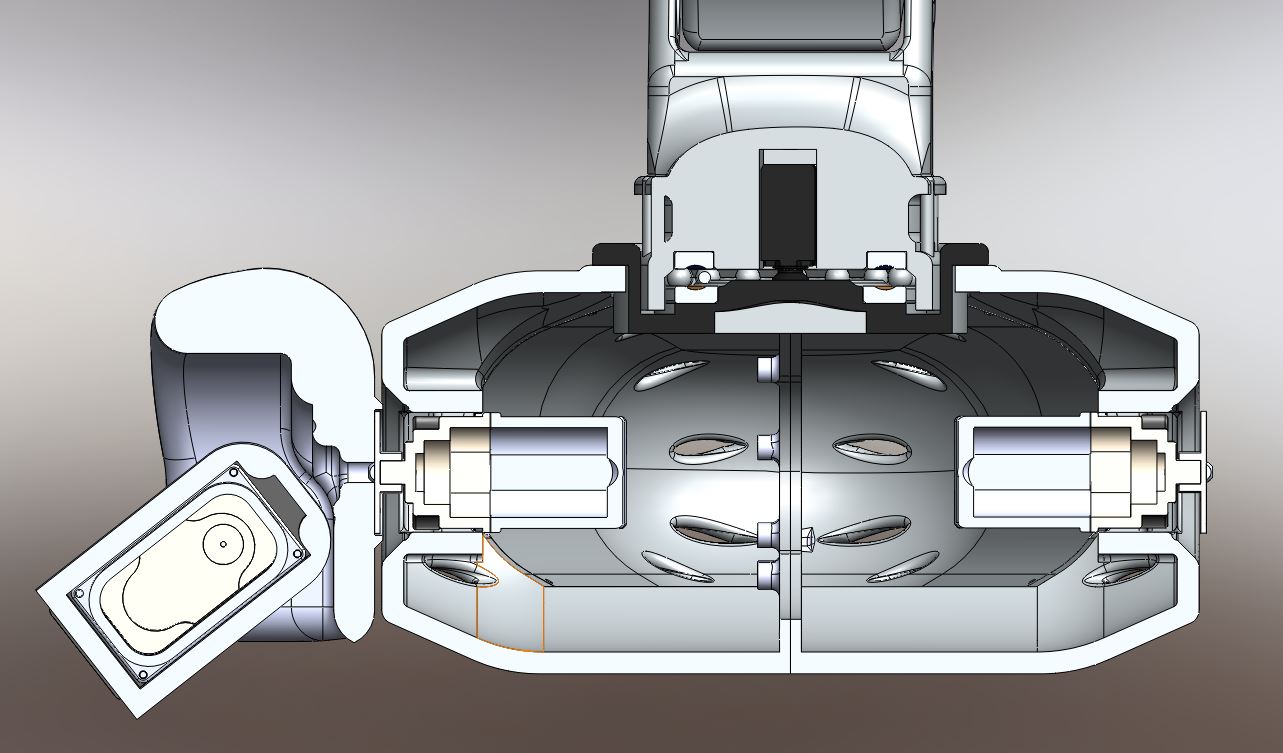
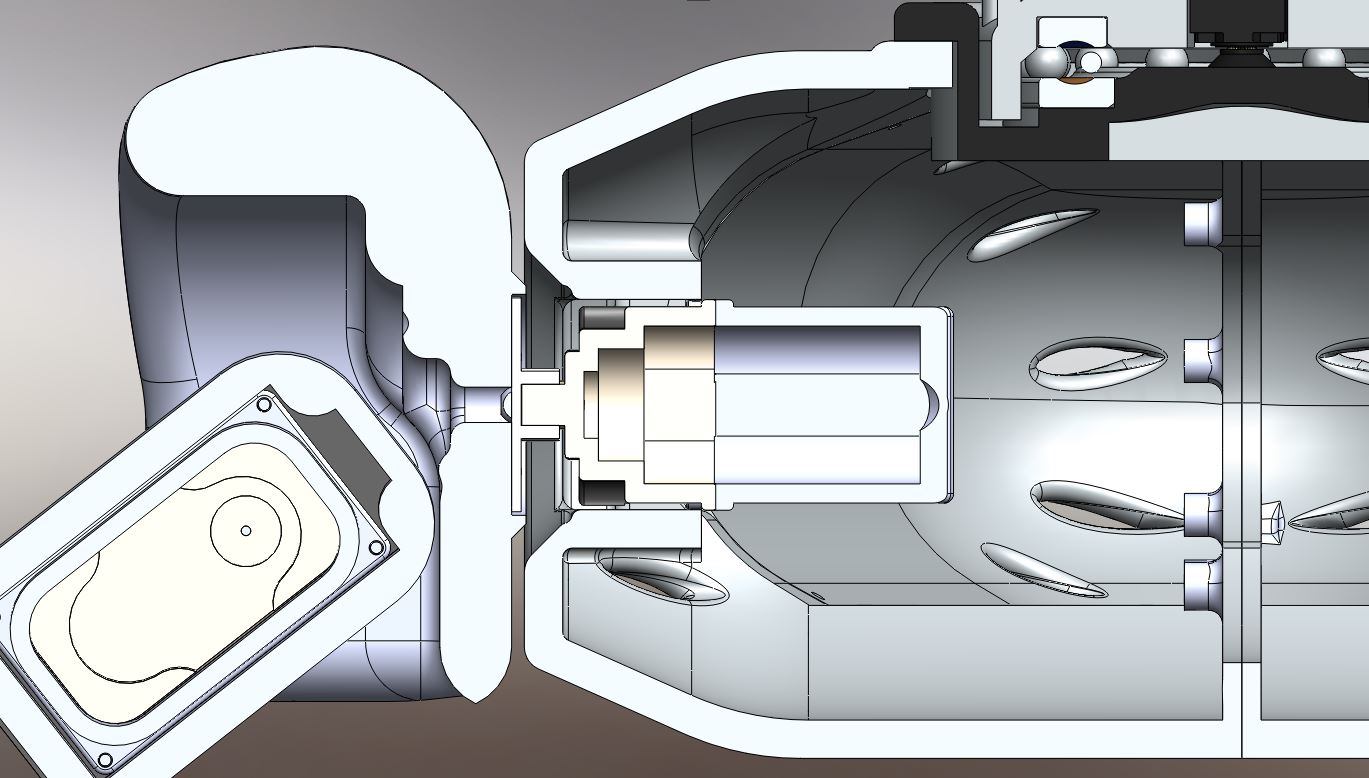
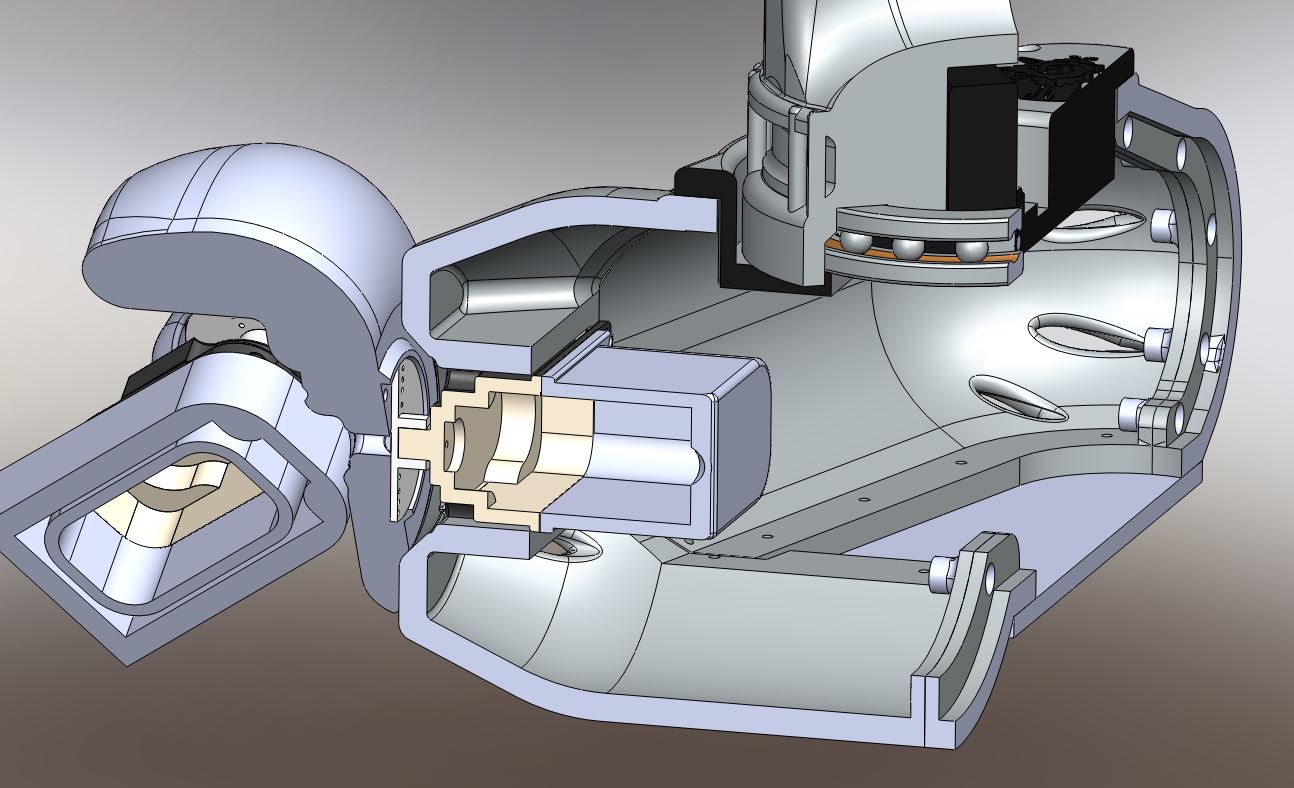
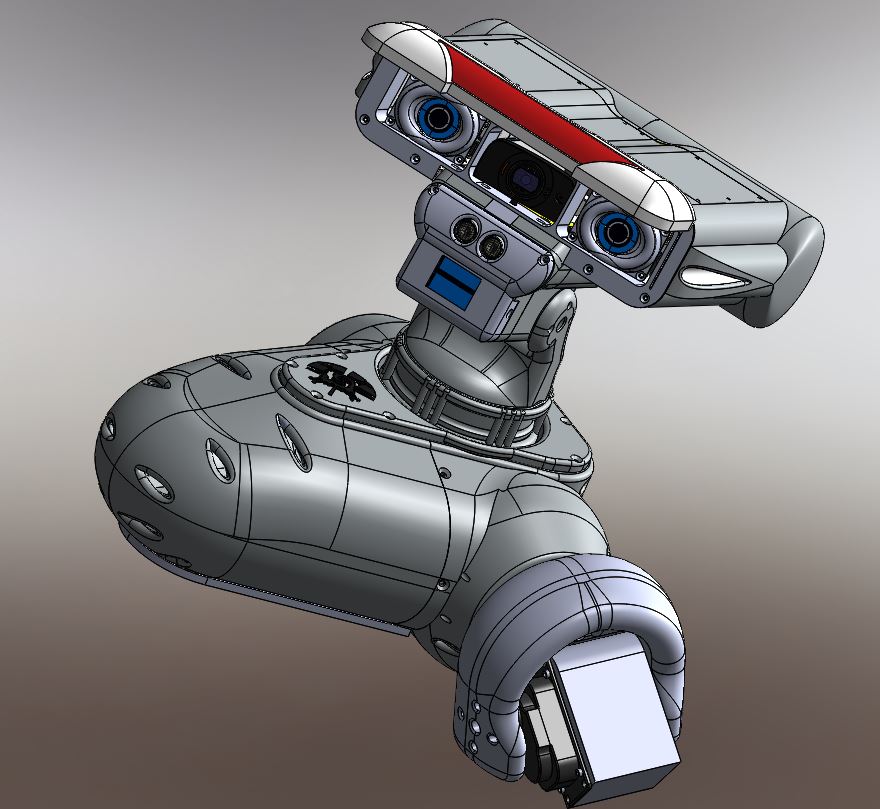
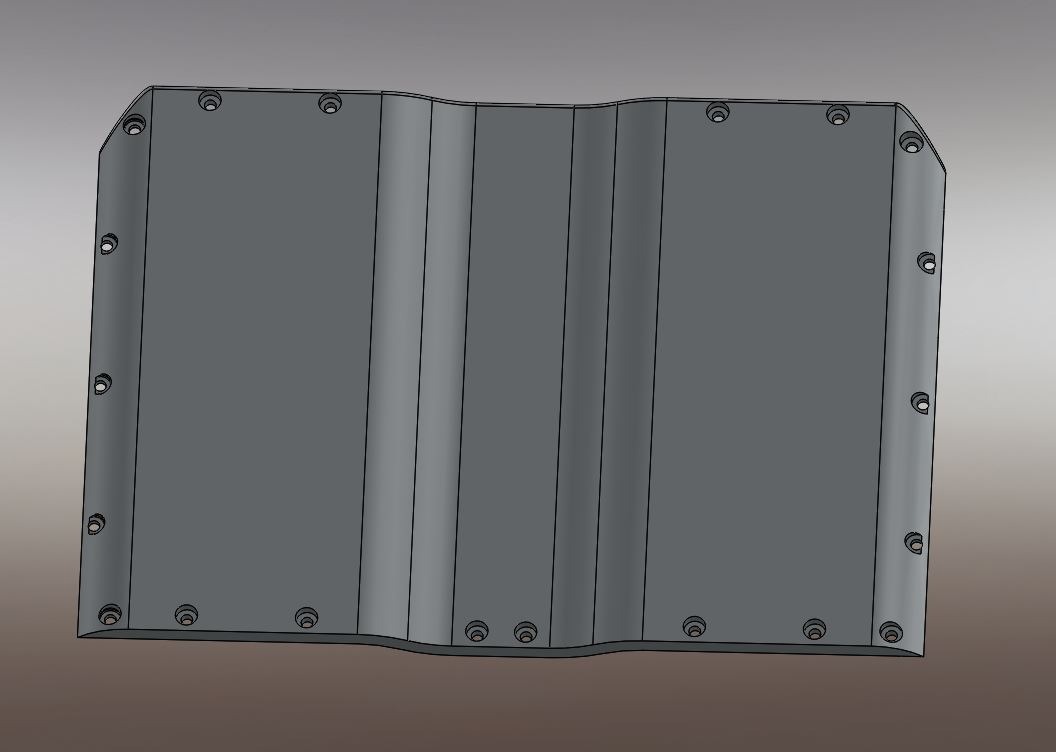
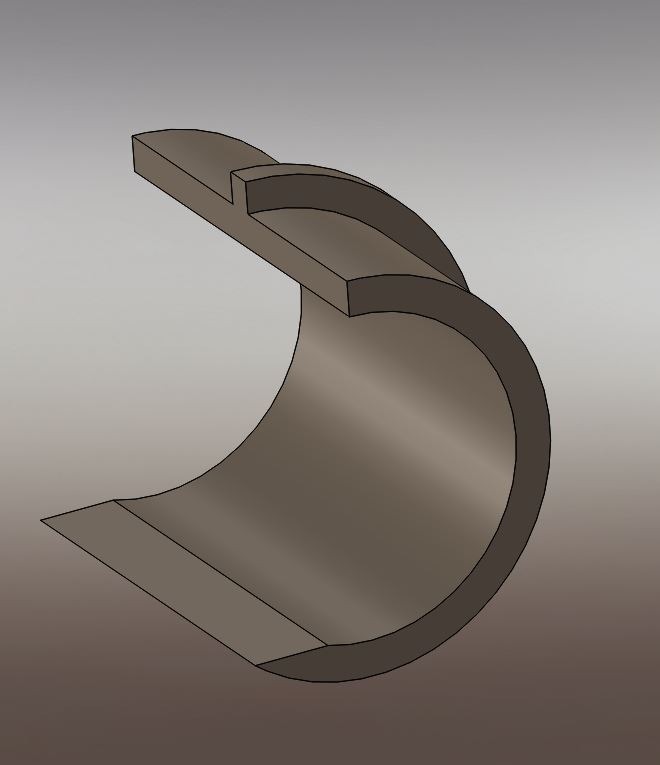
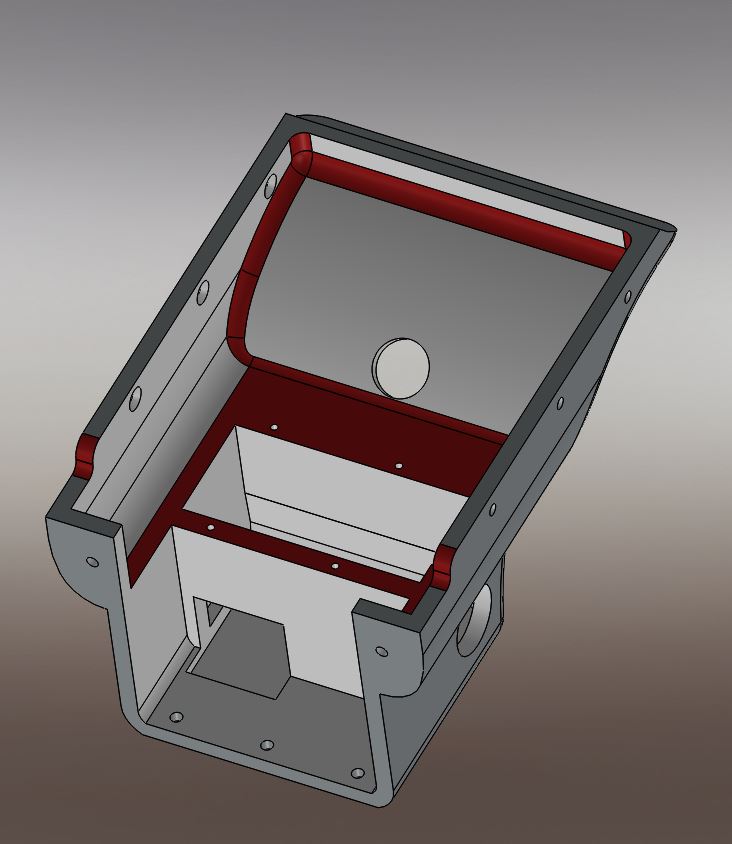
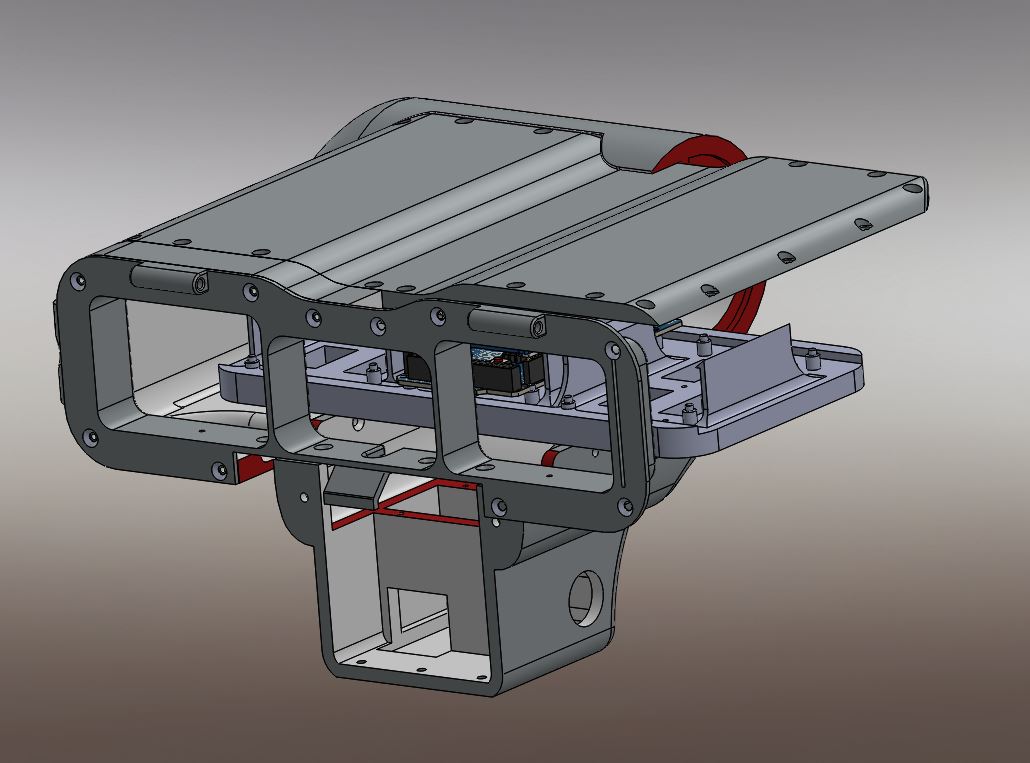
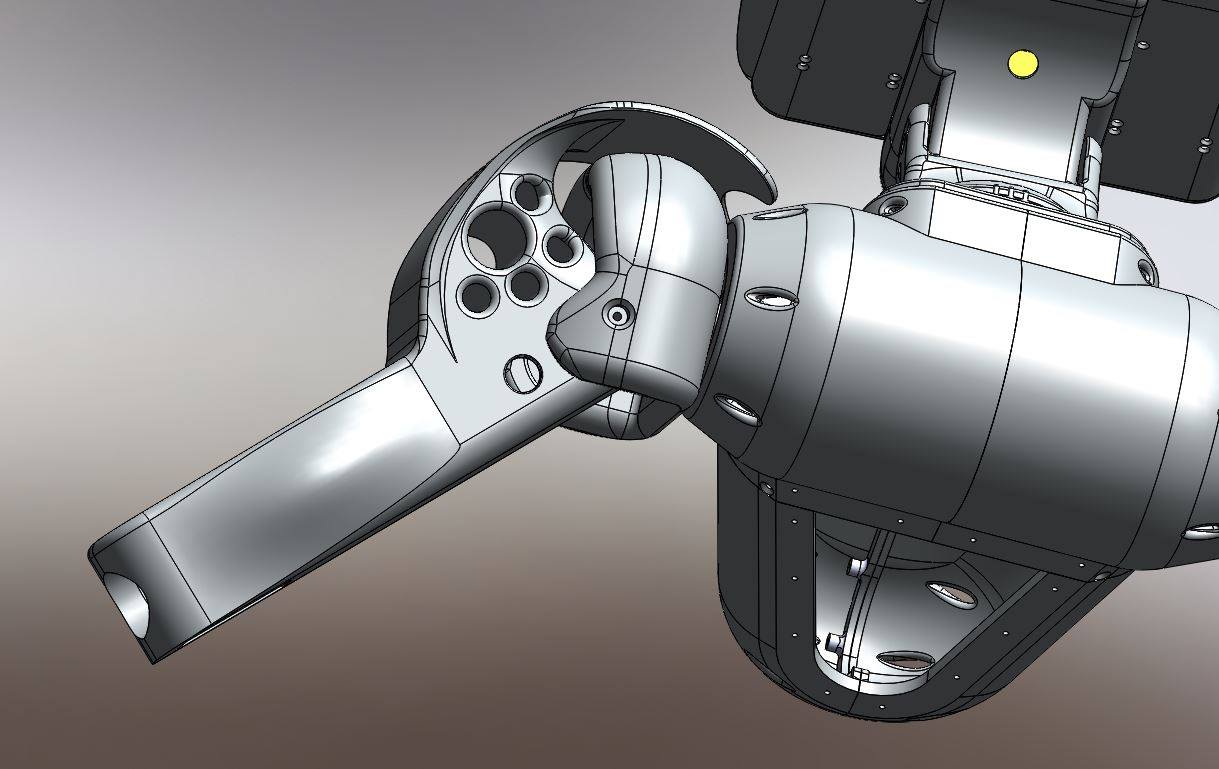
29/01/2017 Etude du bras Phase n-1 |
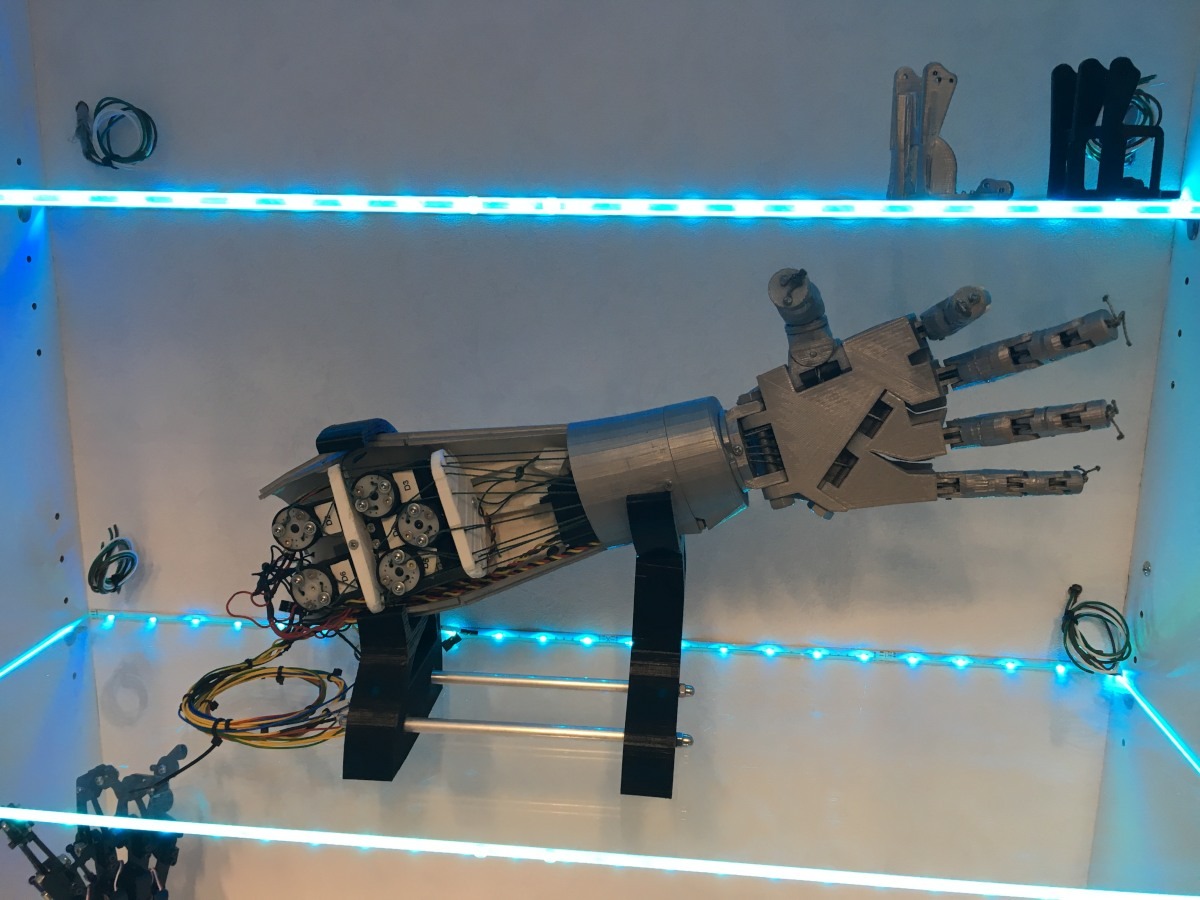
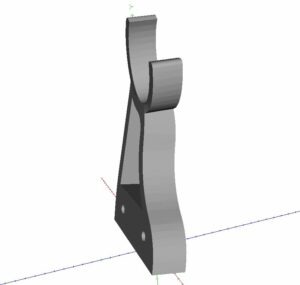
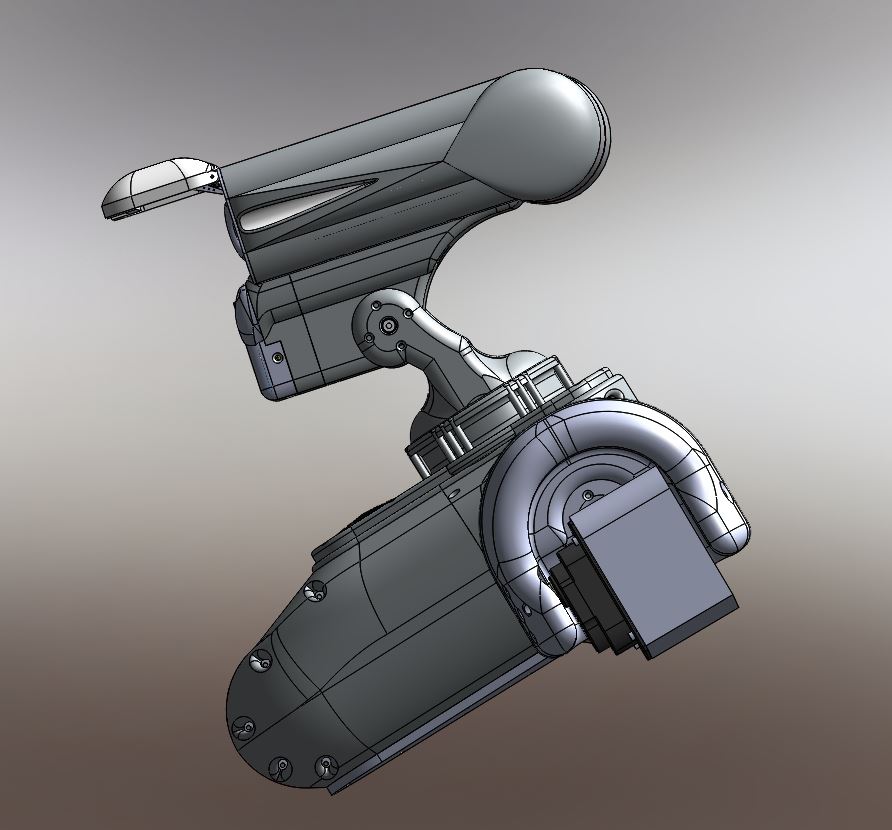
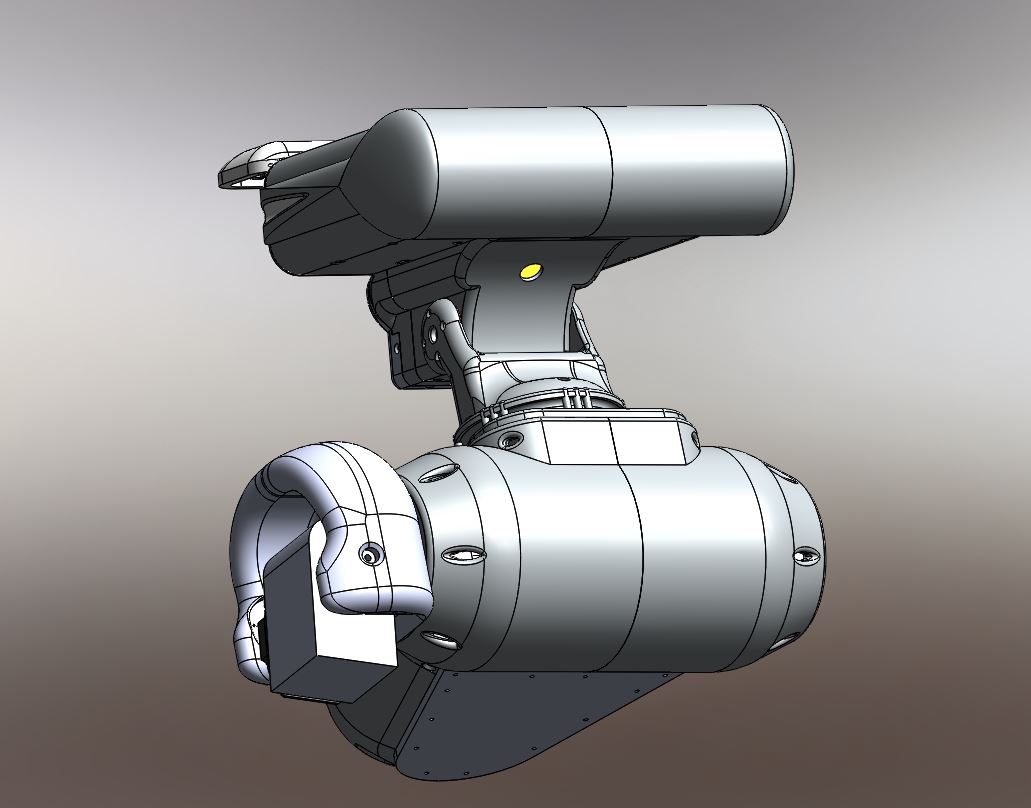
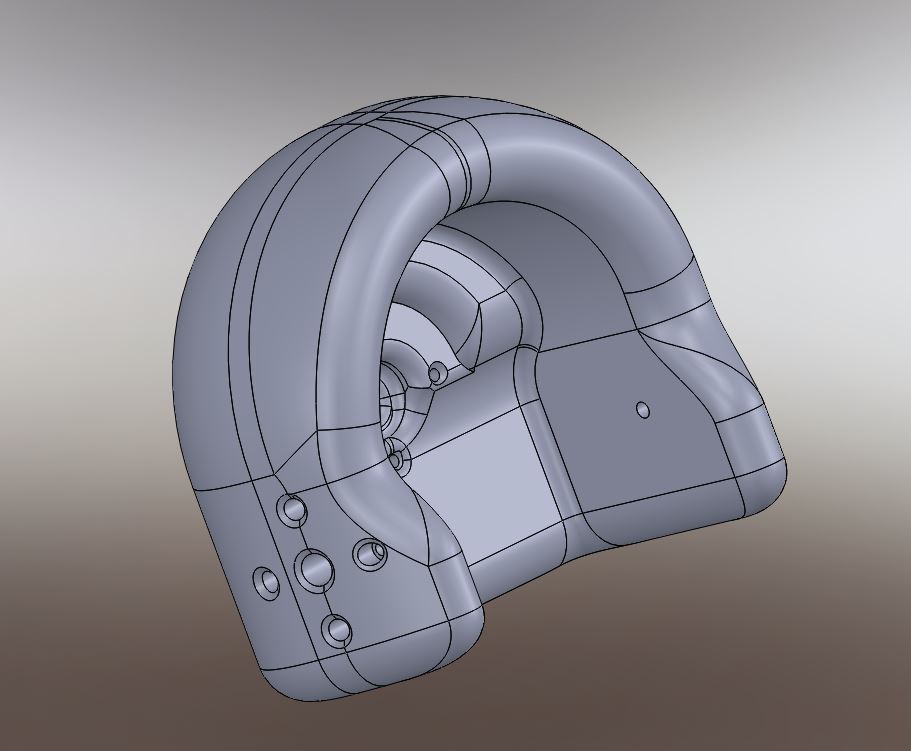
Voici une première étude de la partie du bras de Maya. Comme vous avez pu l’observer sur le dessin les servomoteurs sont en entraînement direct. Le bras est rattaché à l’épaule par un servomoteur en entraînement direct (les seules démultiplications sont à l’intérieur du servomoteur).Celui-ci assurera la rotation de l’épaule, un second servomoteur monté dans la cage de l’épaule assurera l’élévation du bras. Le type de servomoteur choisi nous permettra de porter des charges relativement conséquentes (les tests nous confirmeront le poids des charges déplacées)
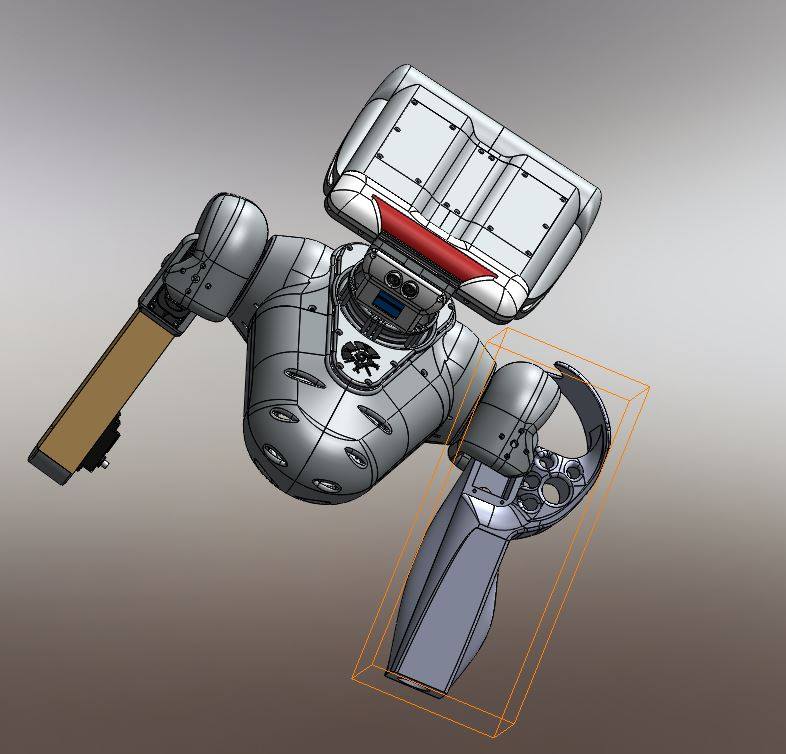
Etude des bras de Maya – RedOhm -001
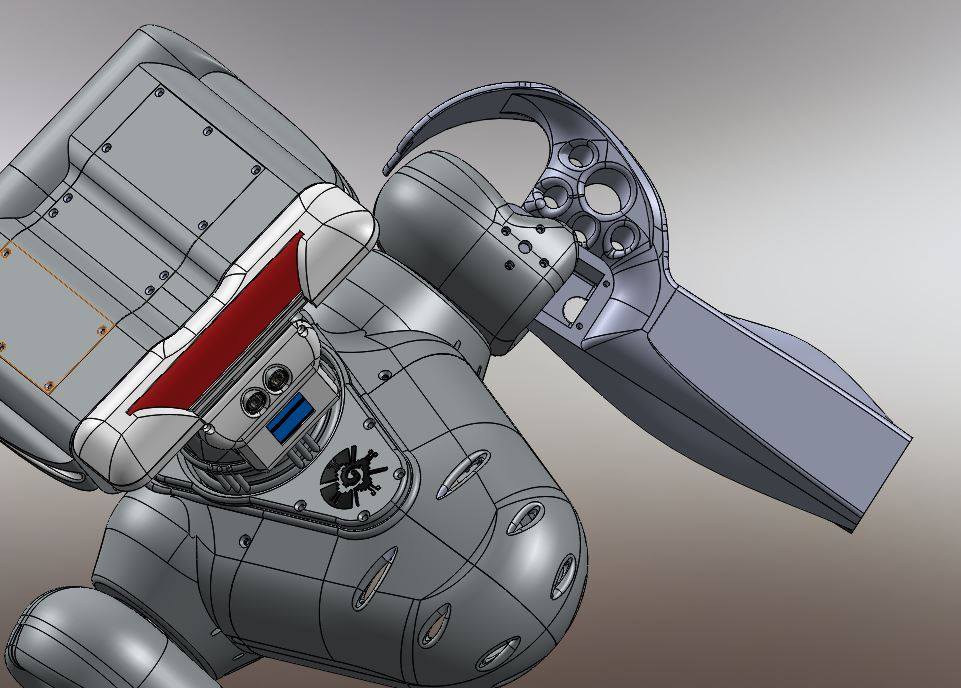
Etude des bras de Maya – RedOhm -002
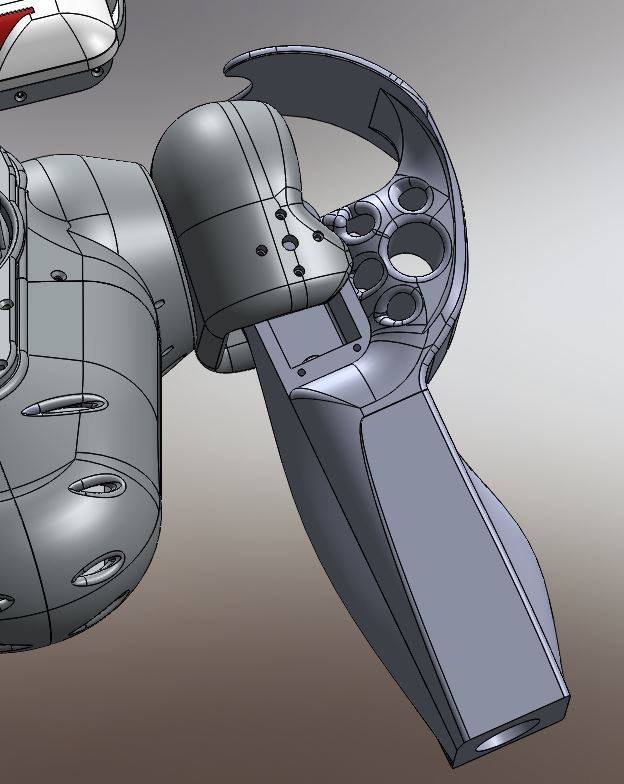
Etude des bras de Maya – RedOhm -003

Etude des bras de Maya – RedOhm -004
Etude des bras de Maya – RedOhm -005

Etude des bras de Maya – RedOhm -006
–
| Retour au sommaire |
![]()
![]()