–
Mise à jour le 15/11/2017 :
Sommaire :
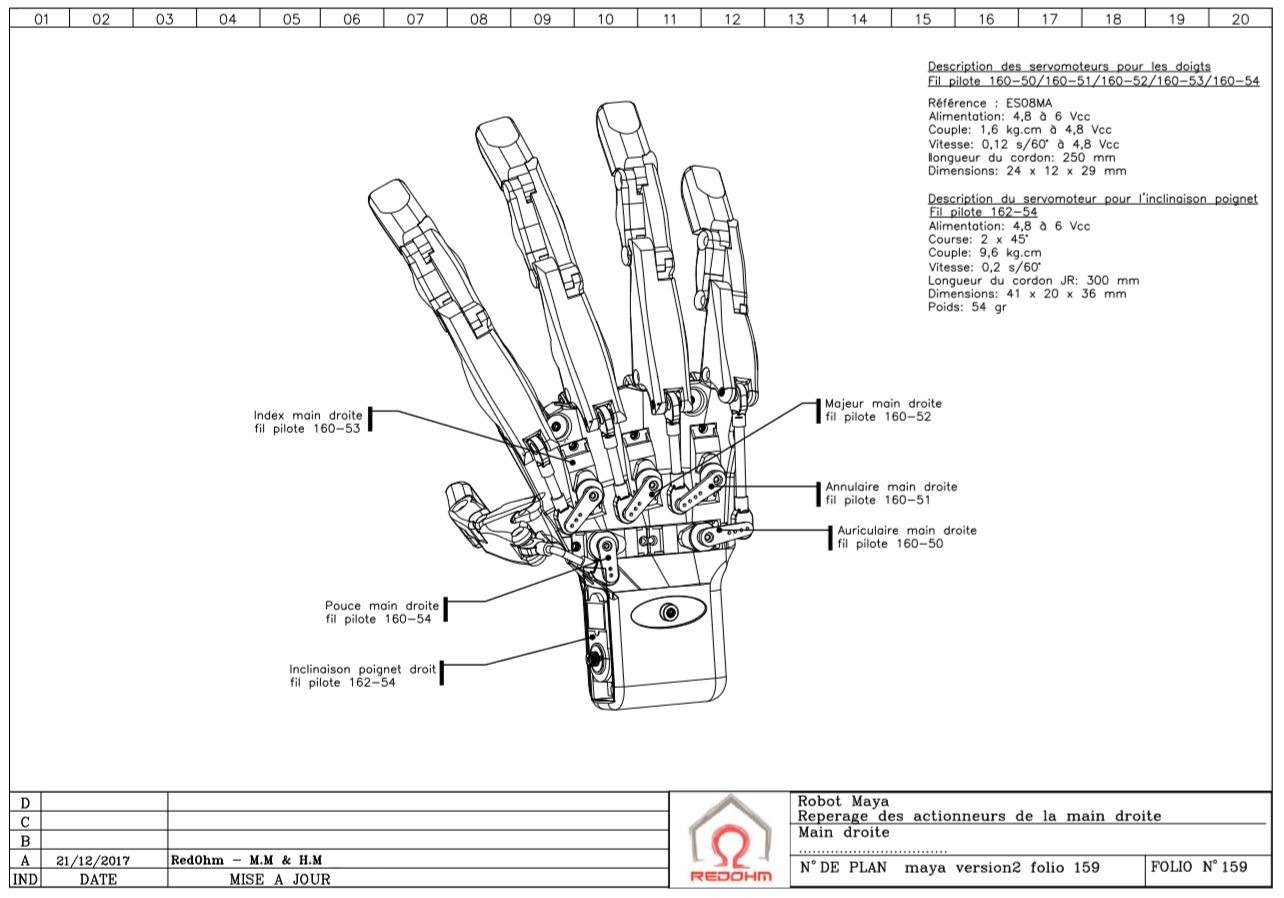
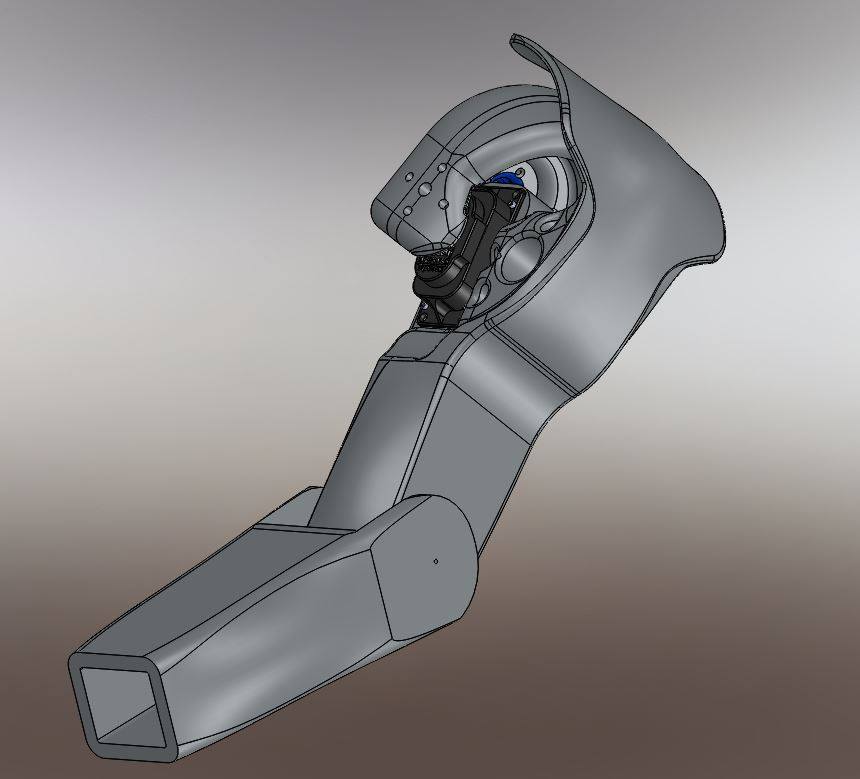
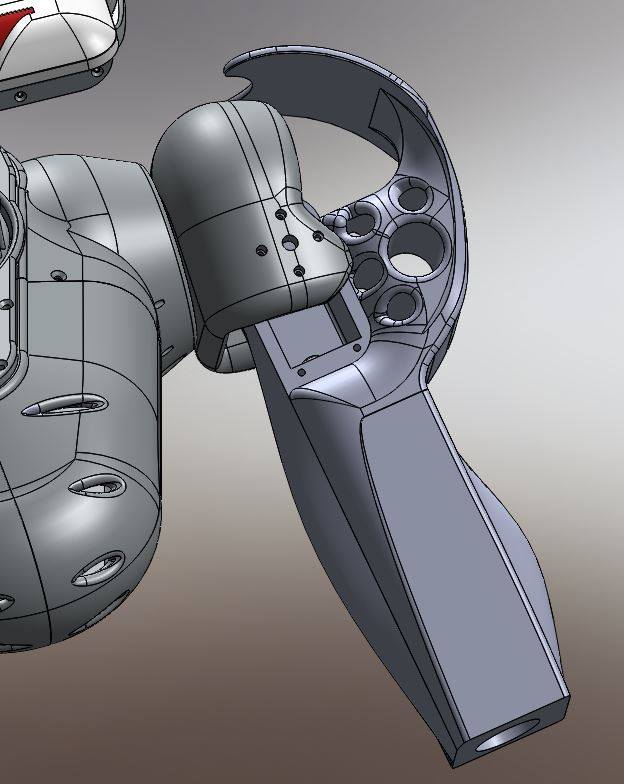
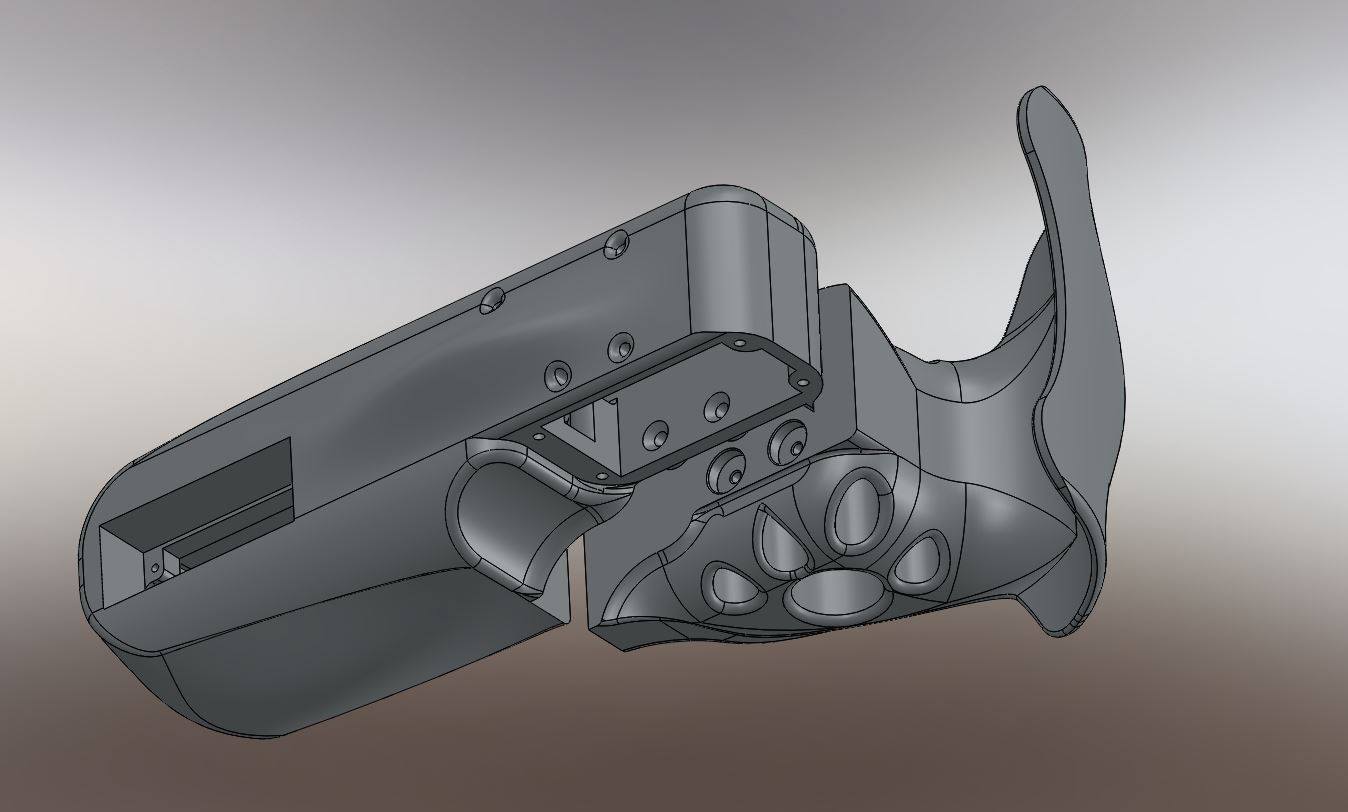
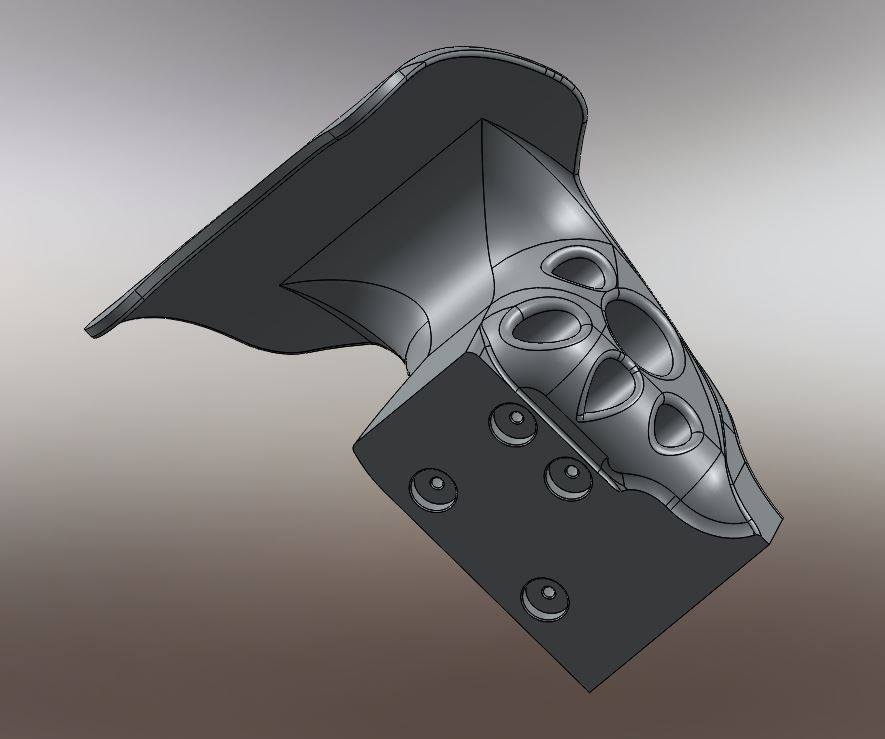
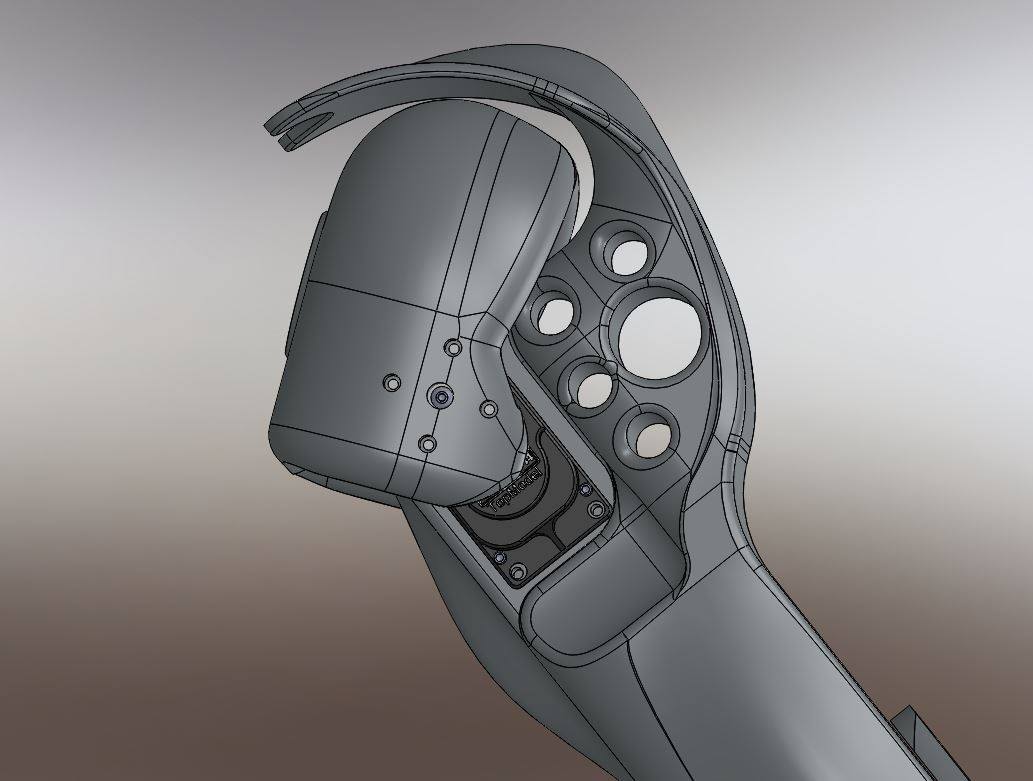
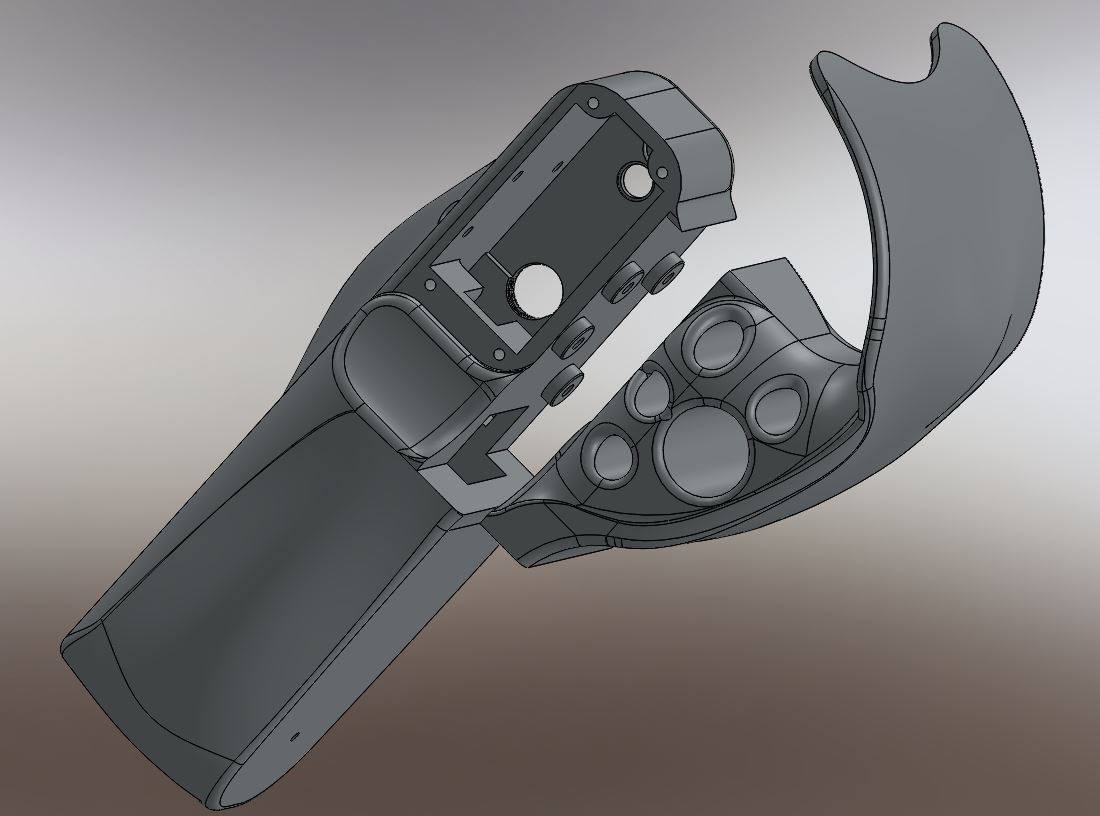
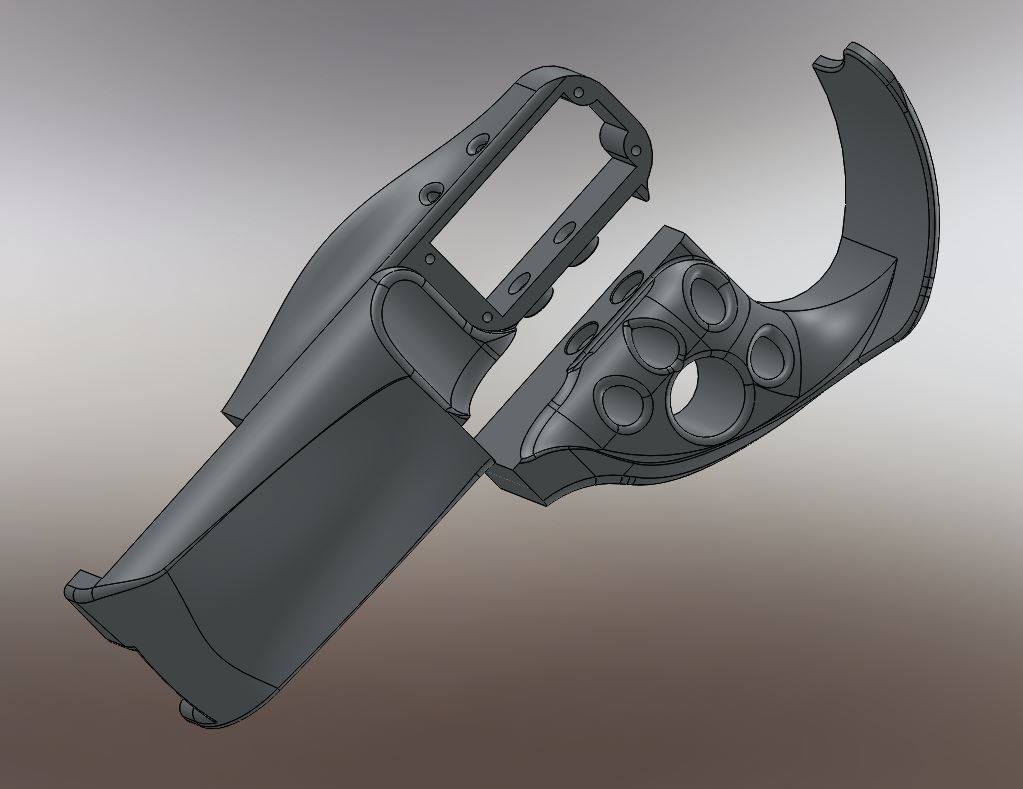
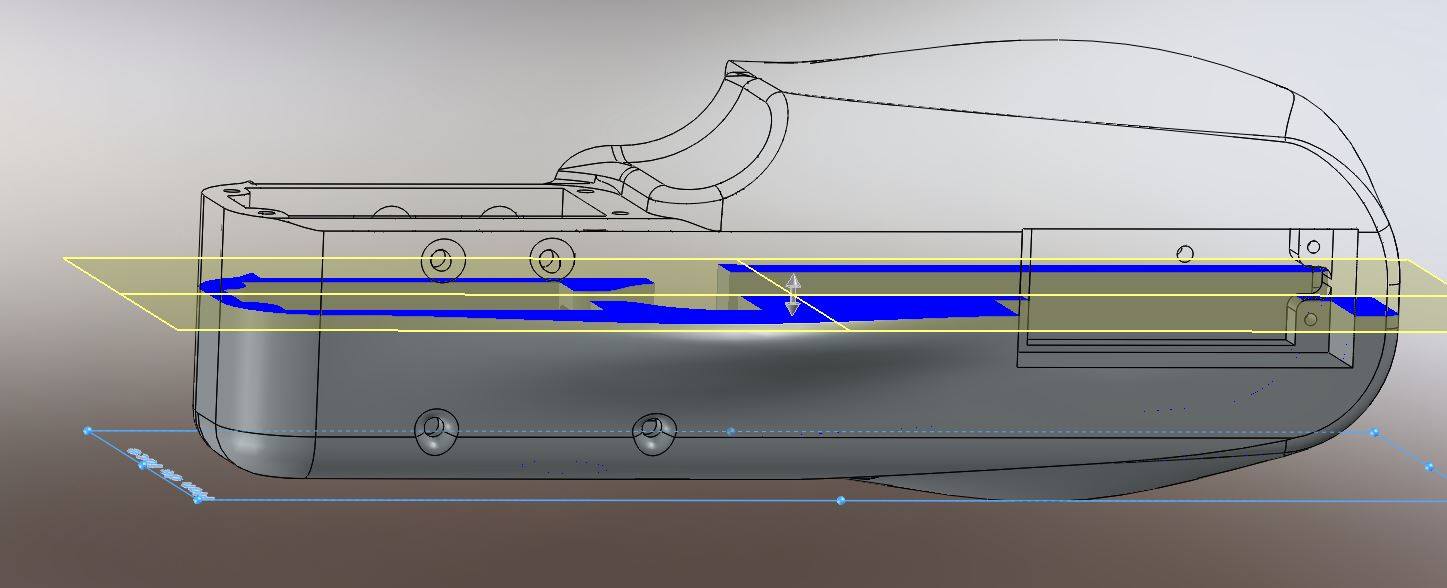
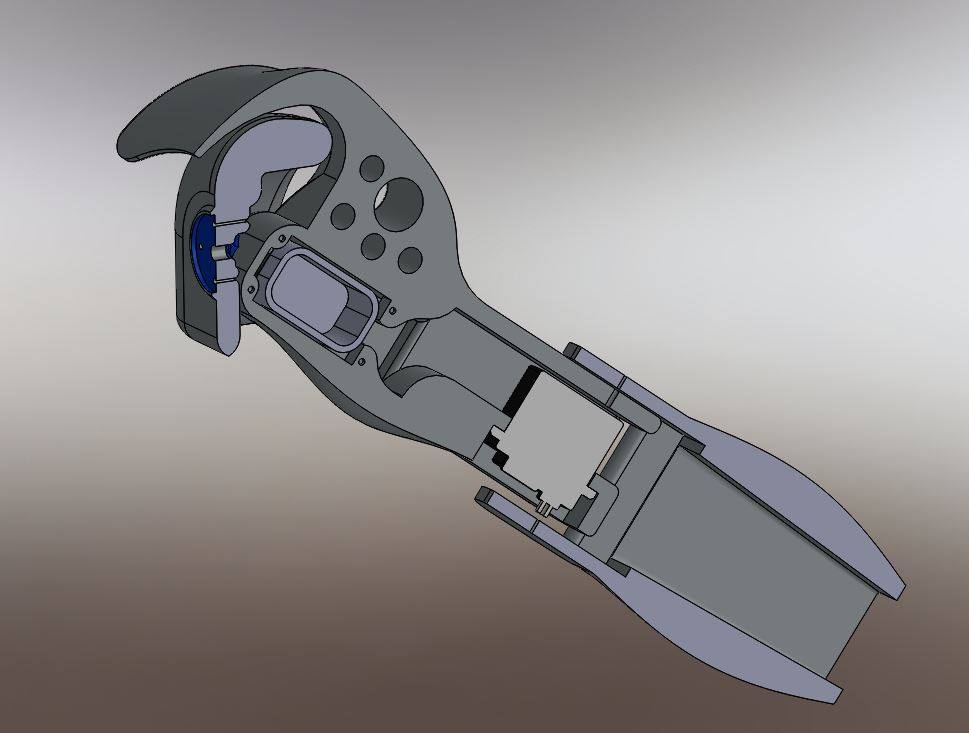
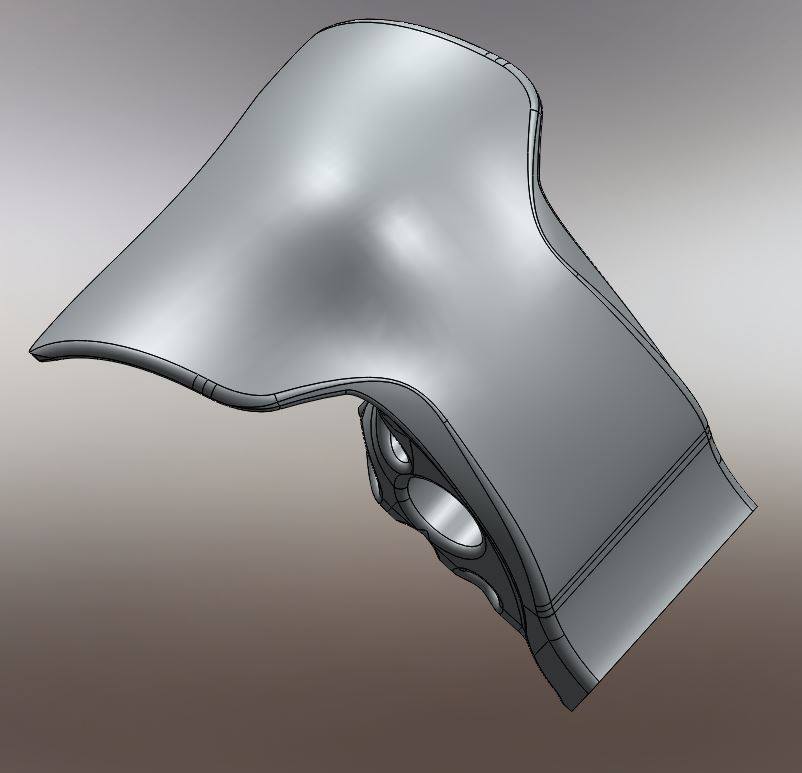
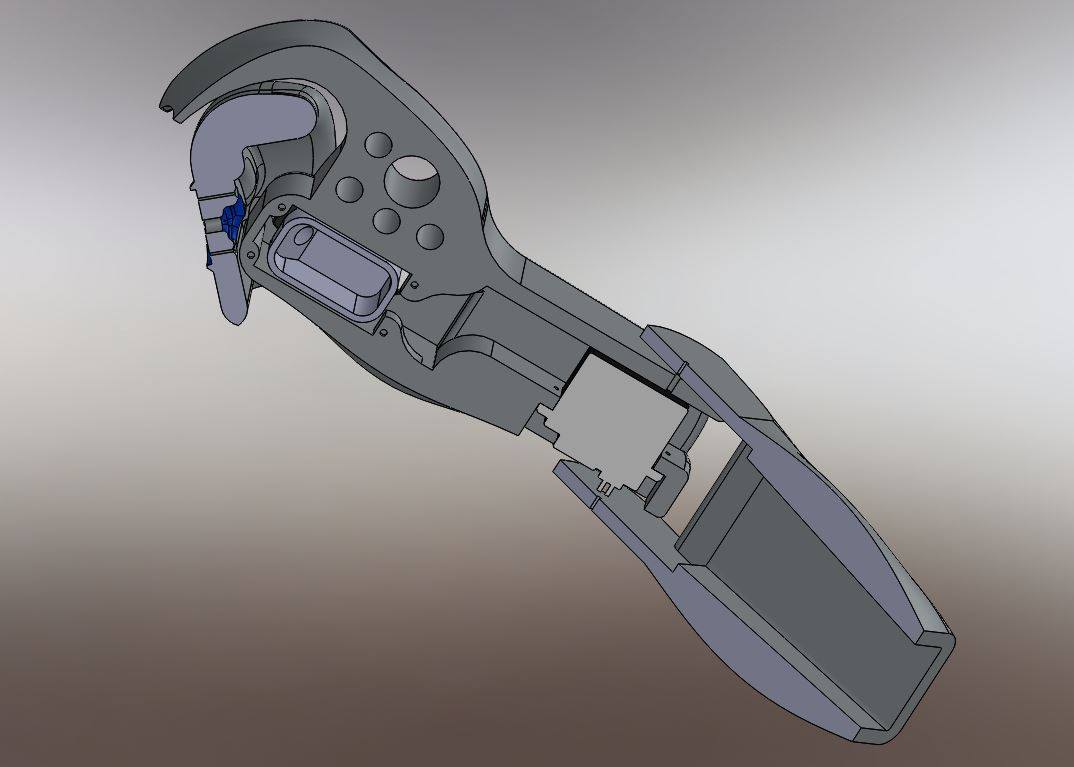
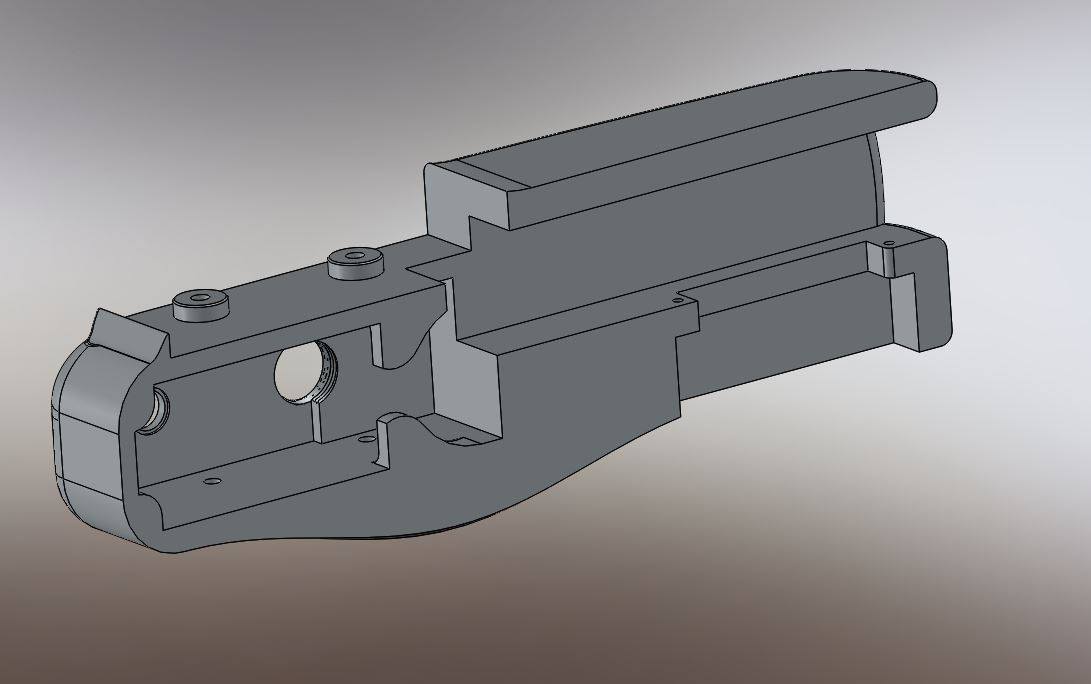
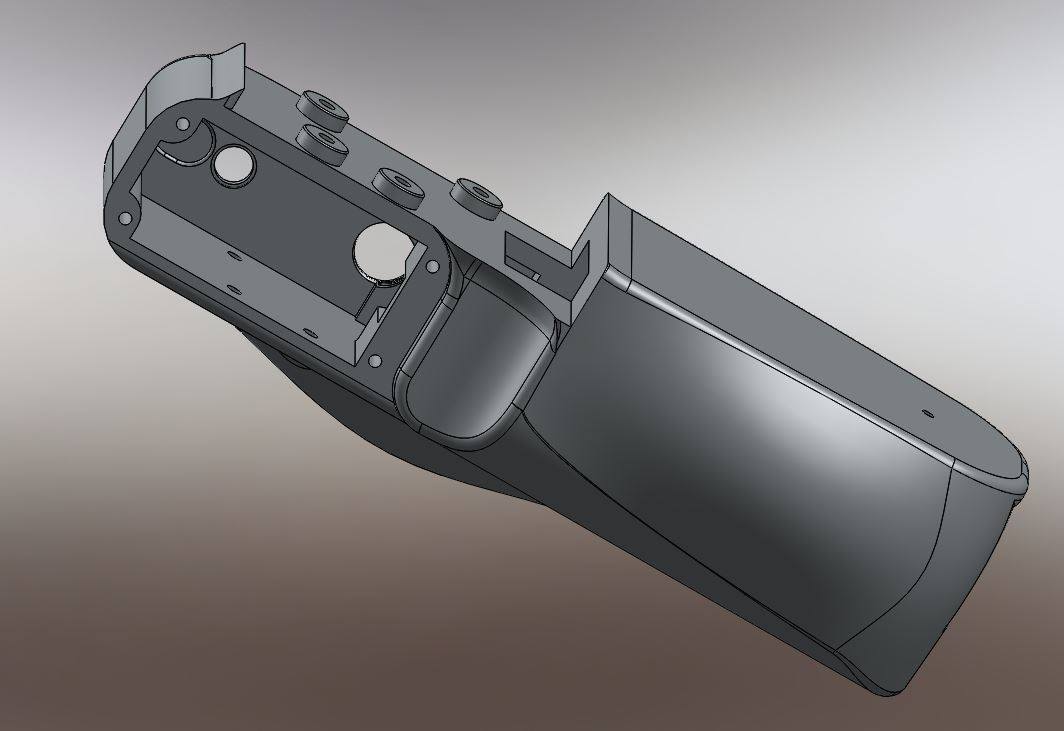
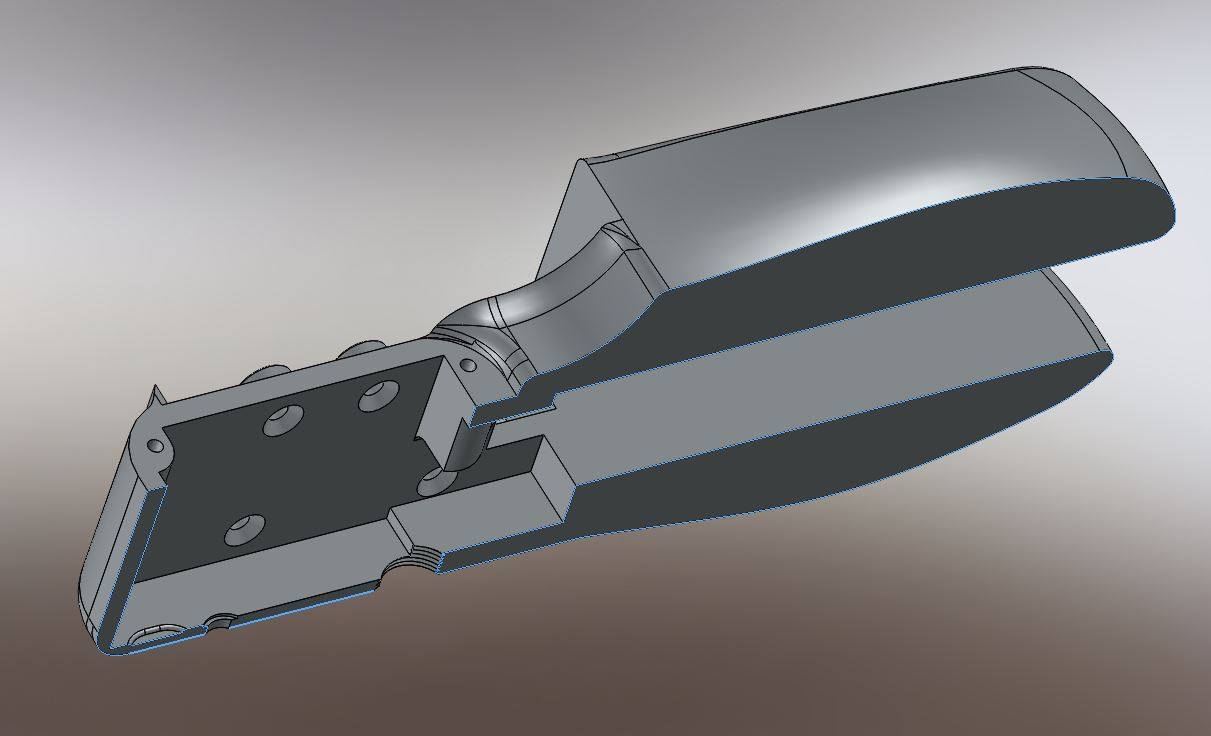
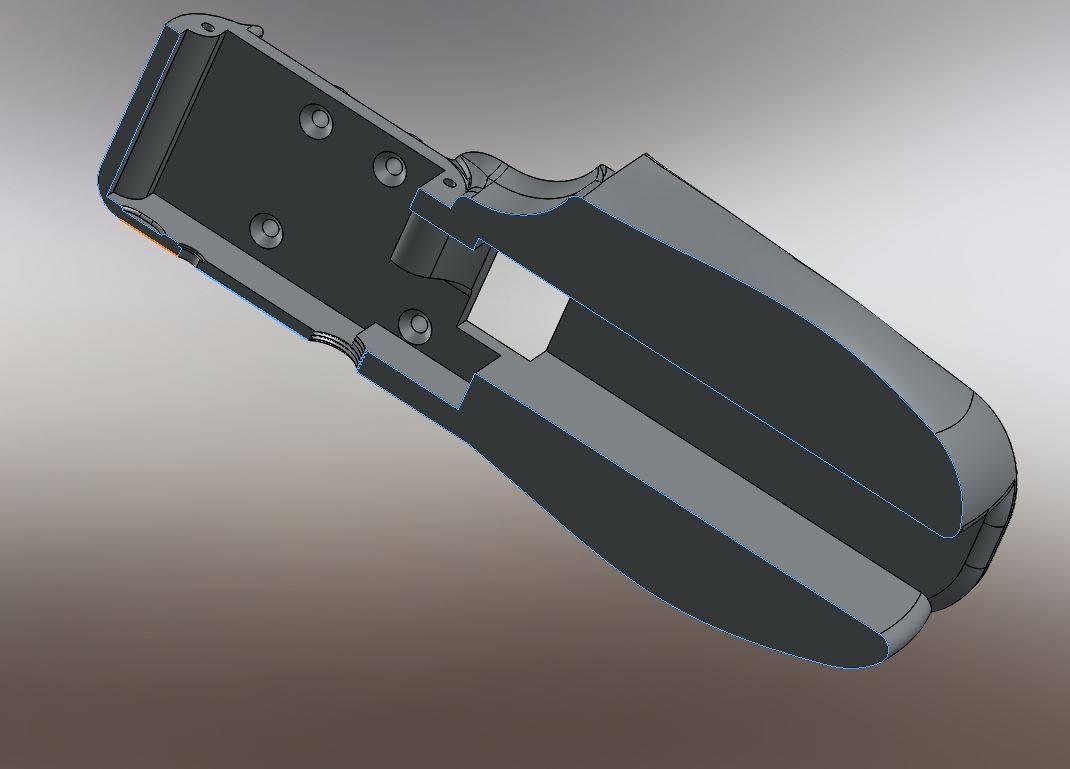
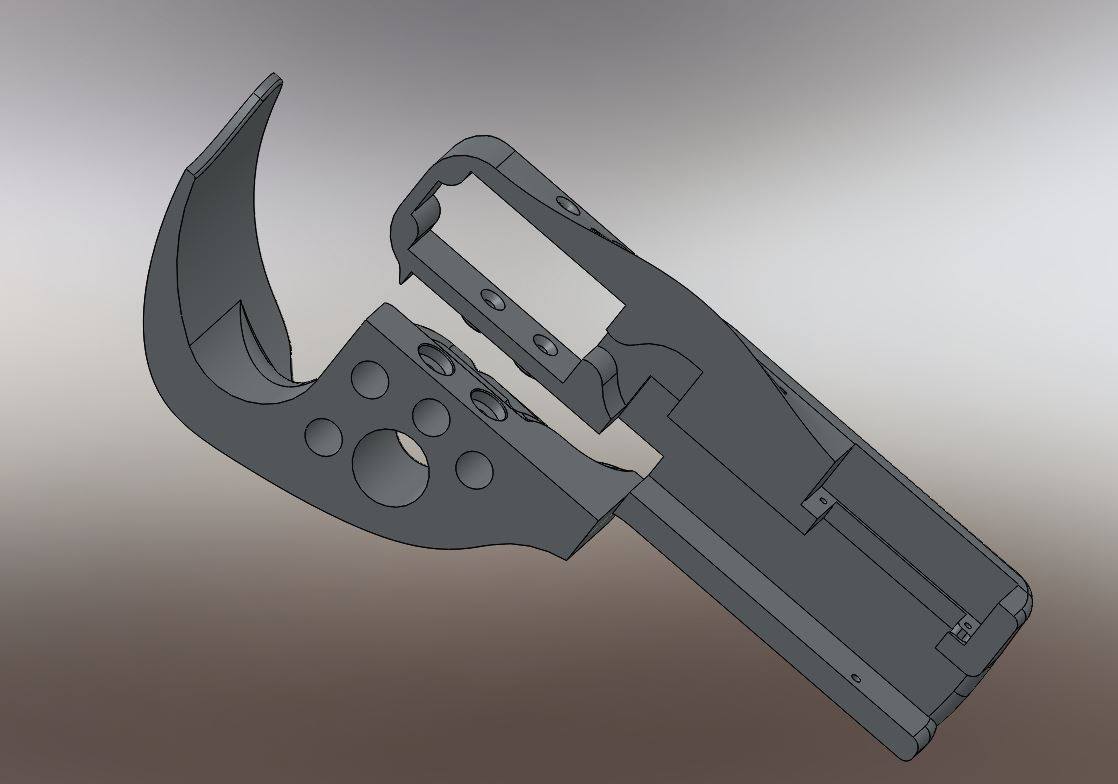
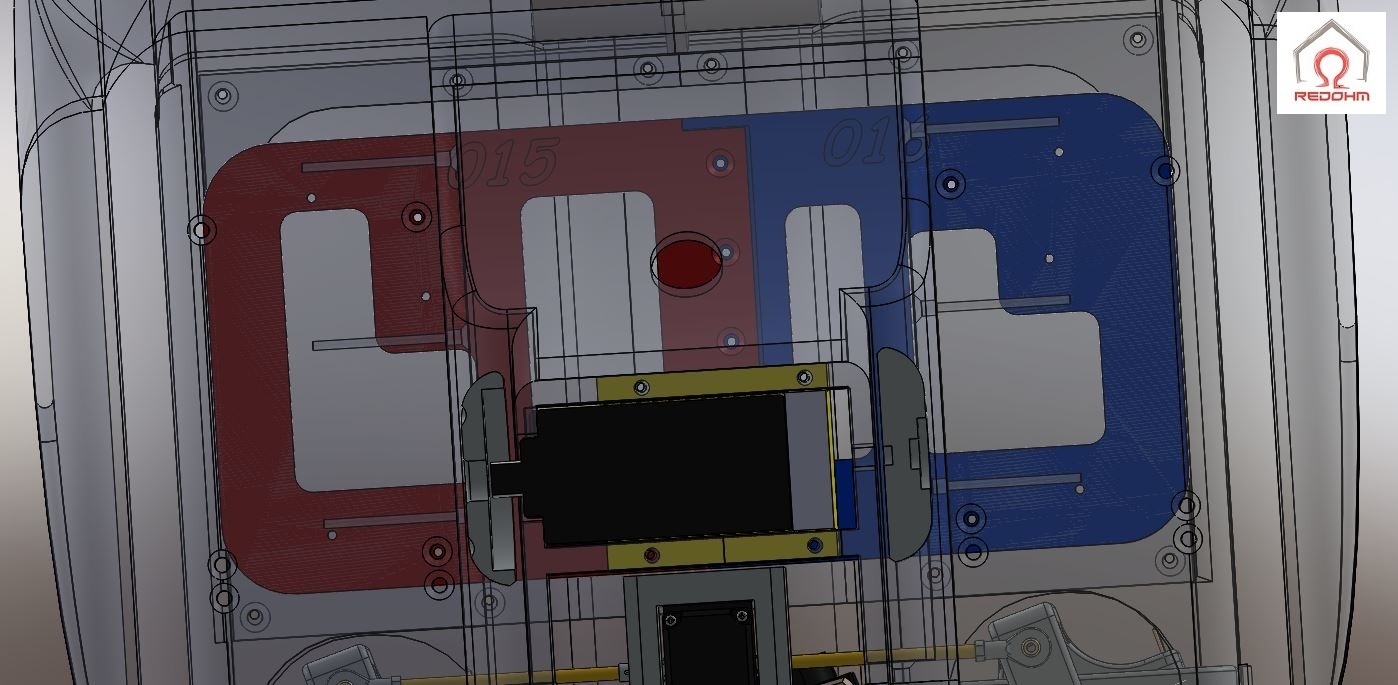
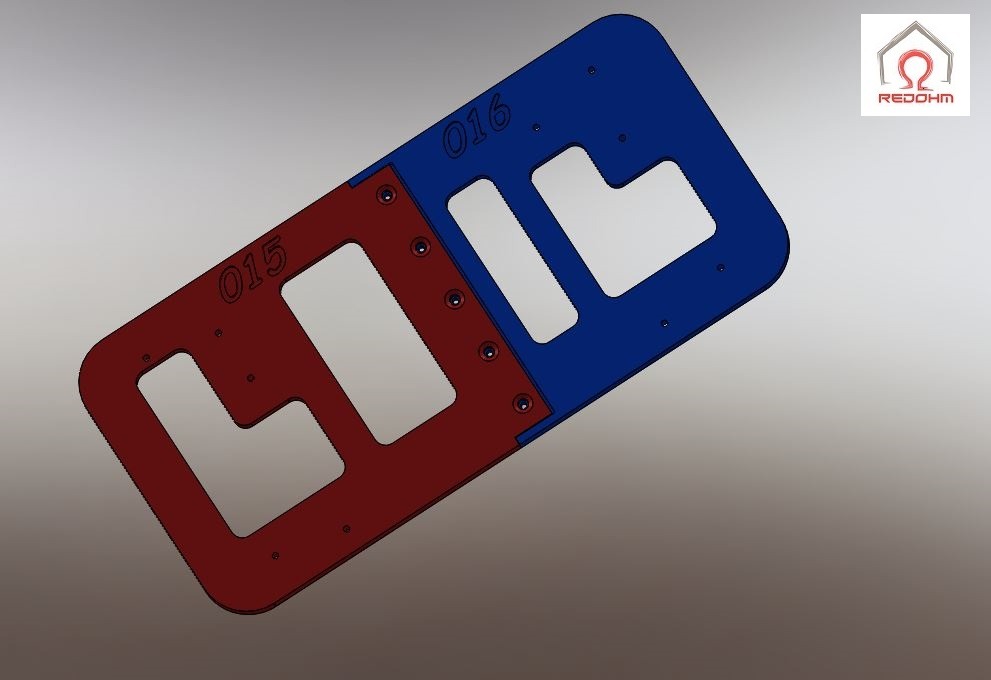
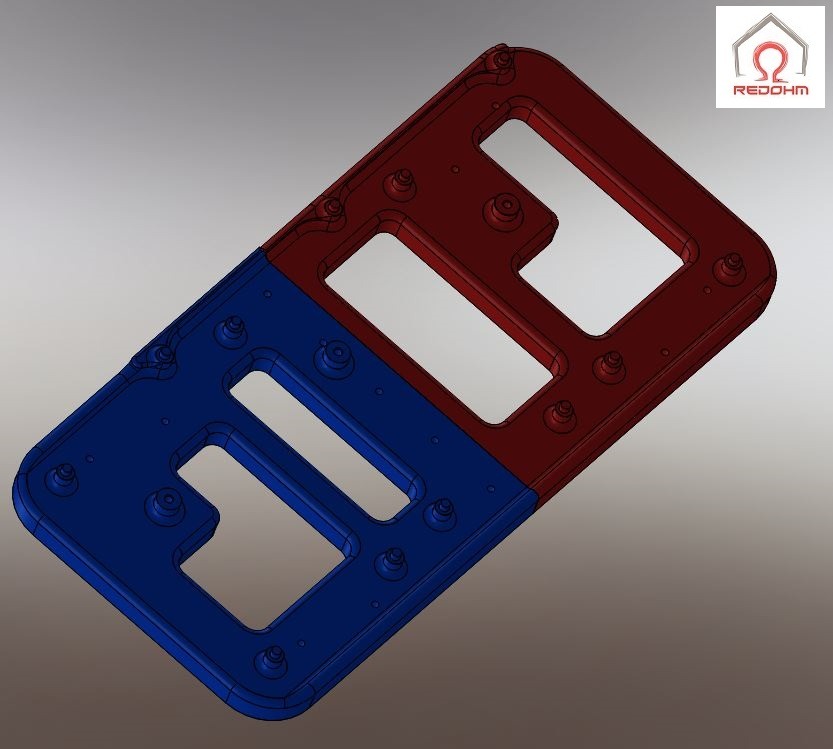
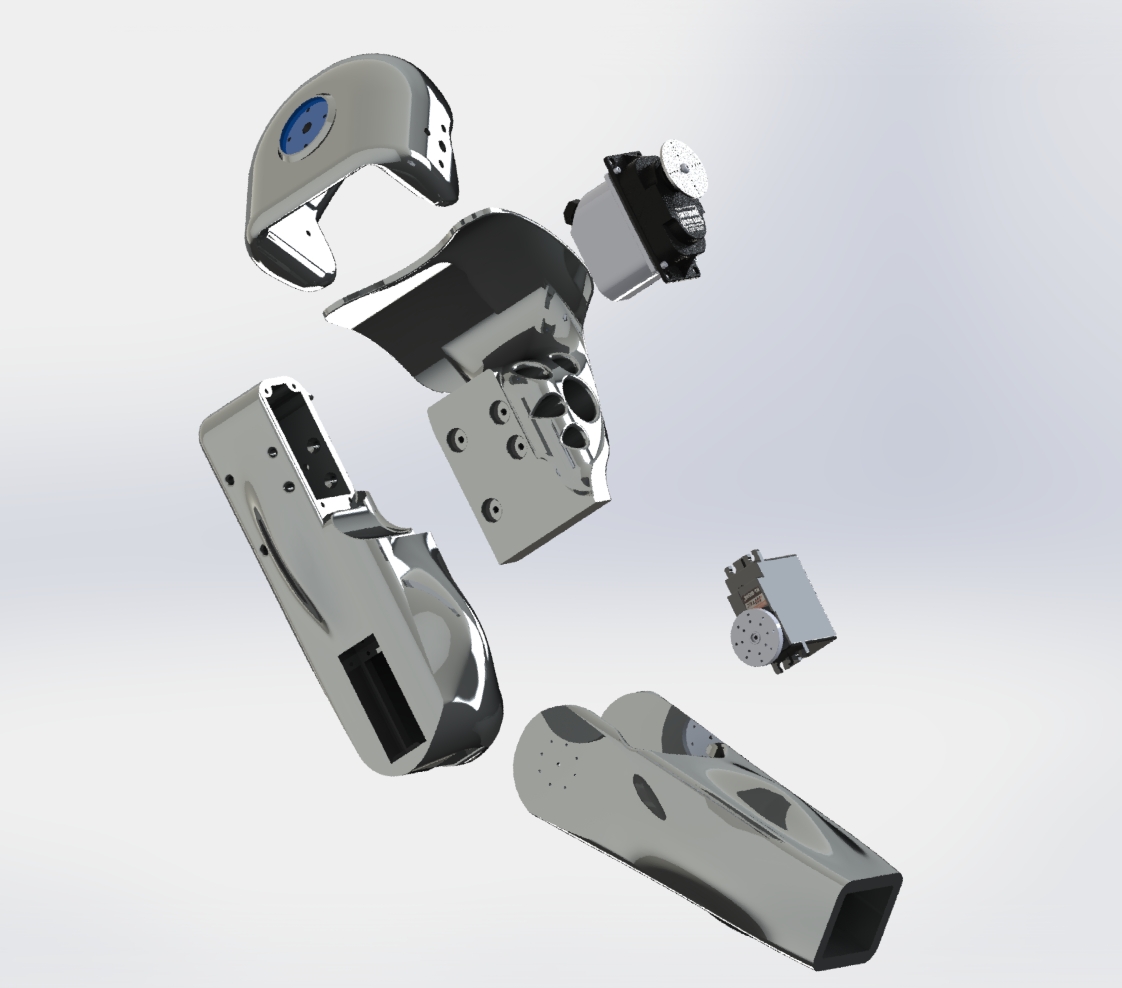
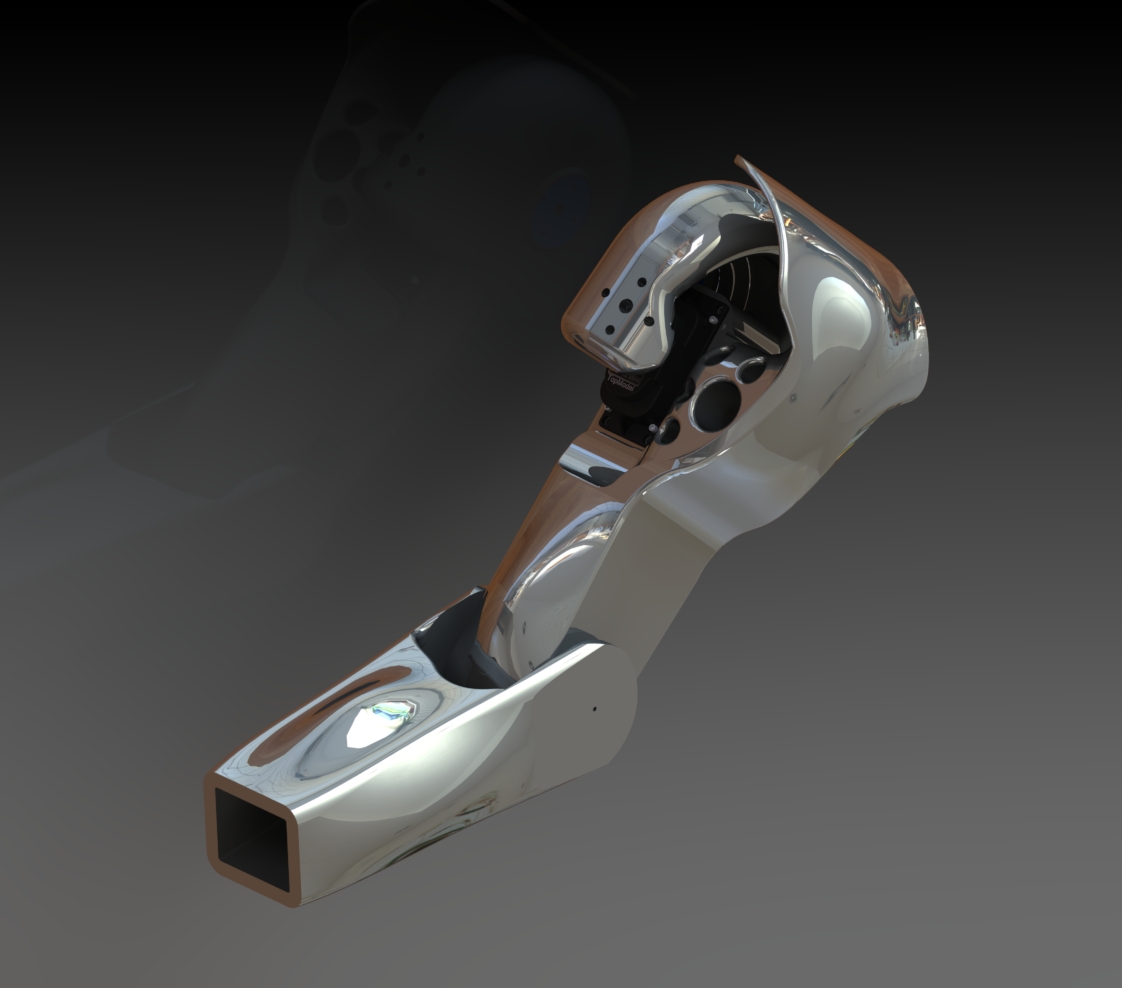
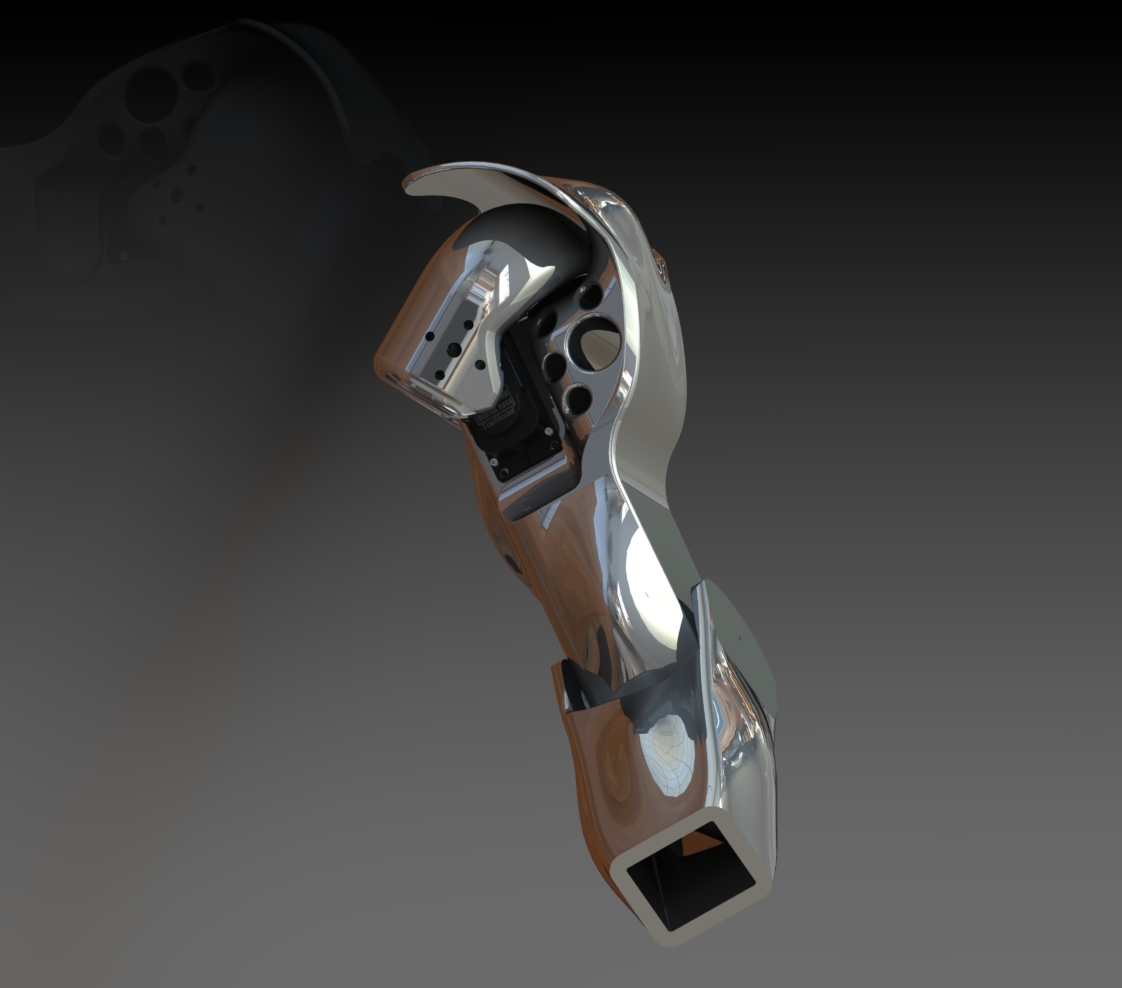
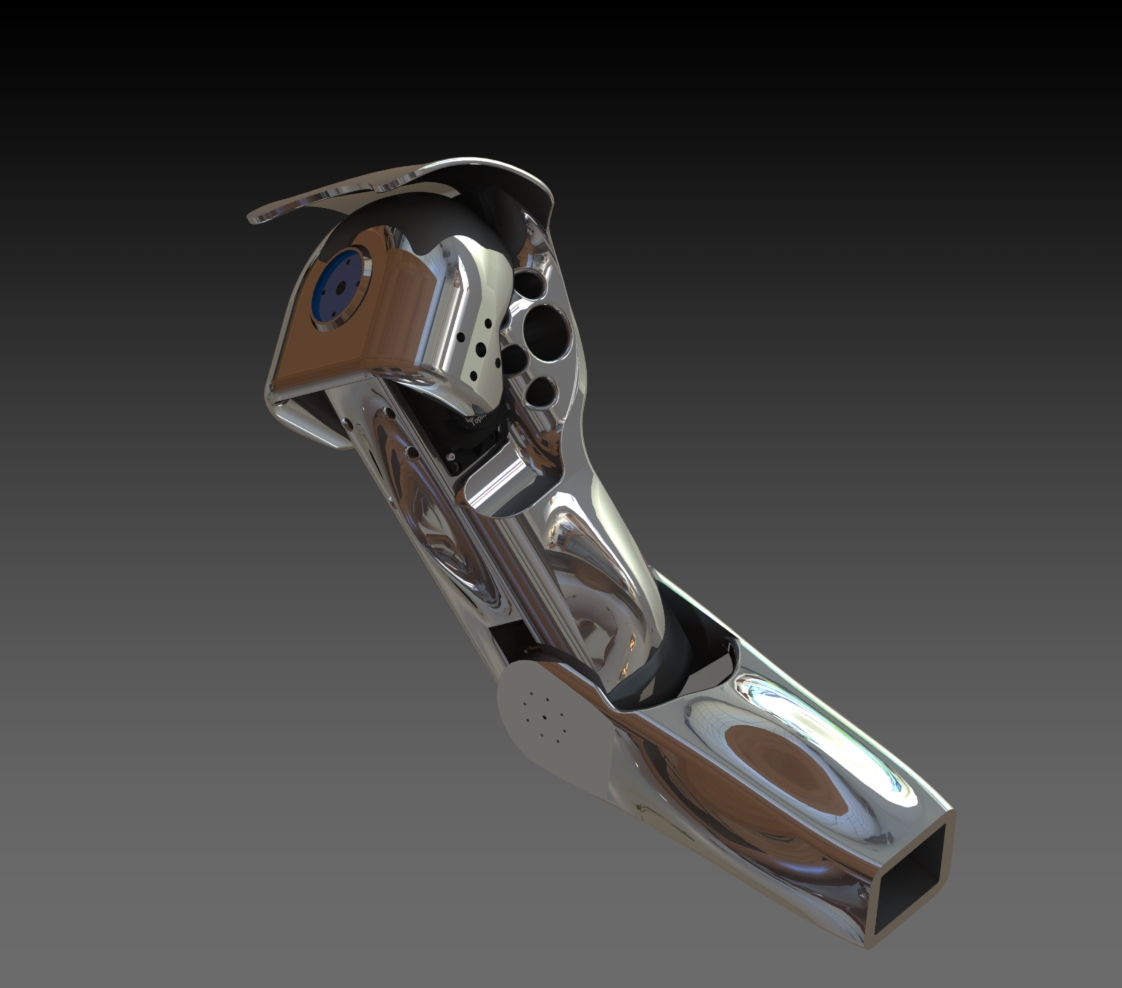
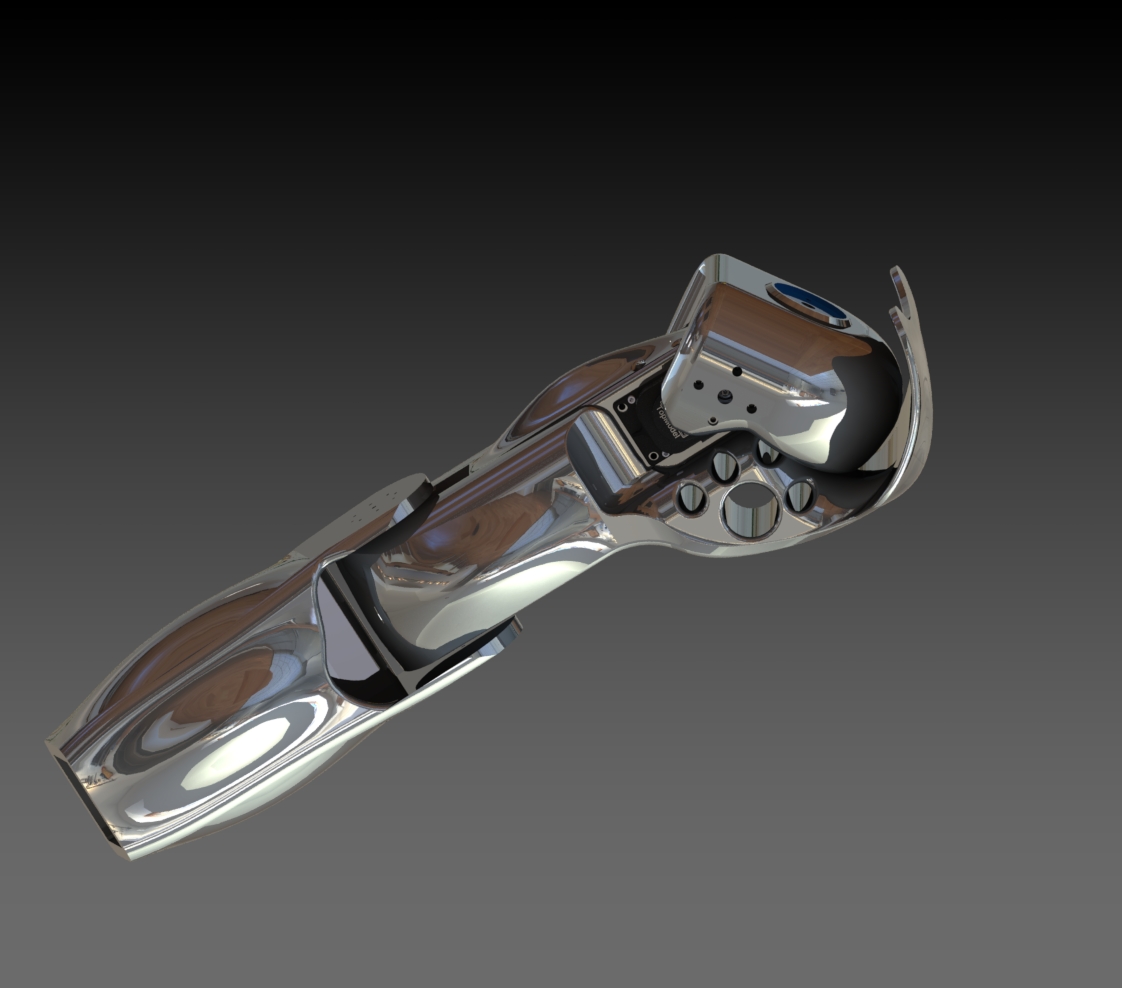
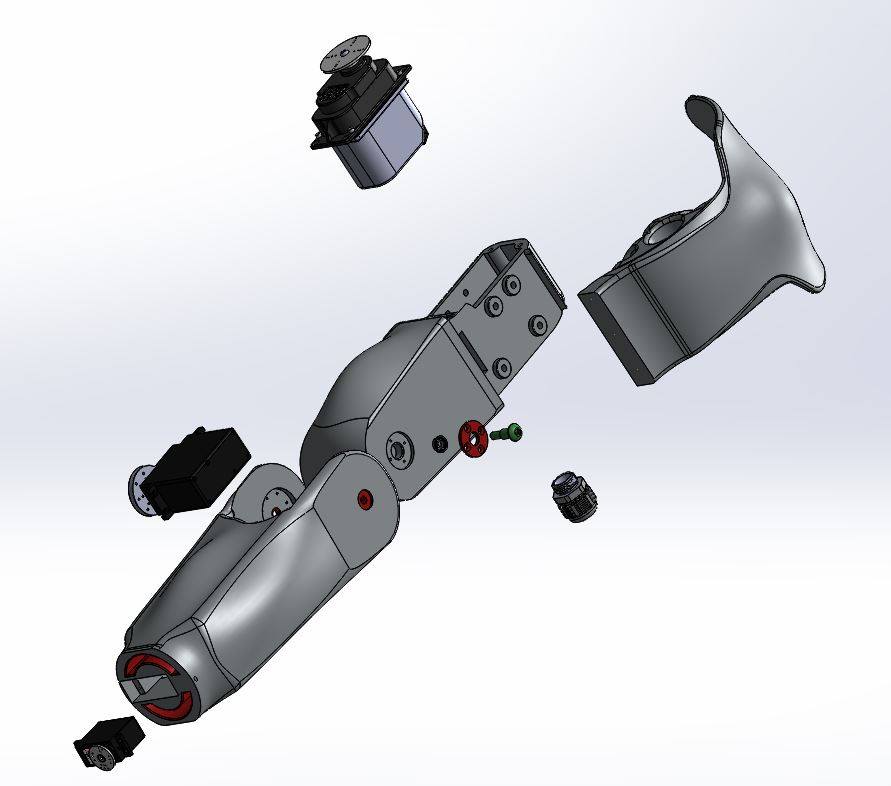
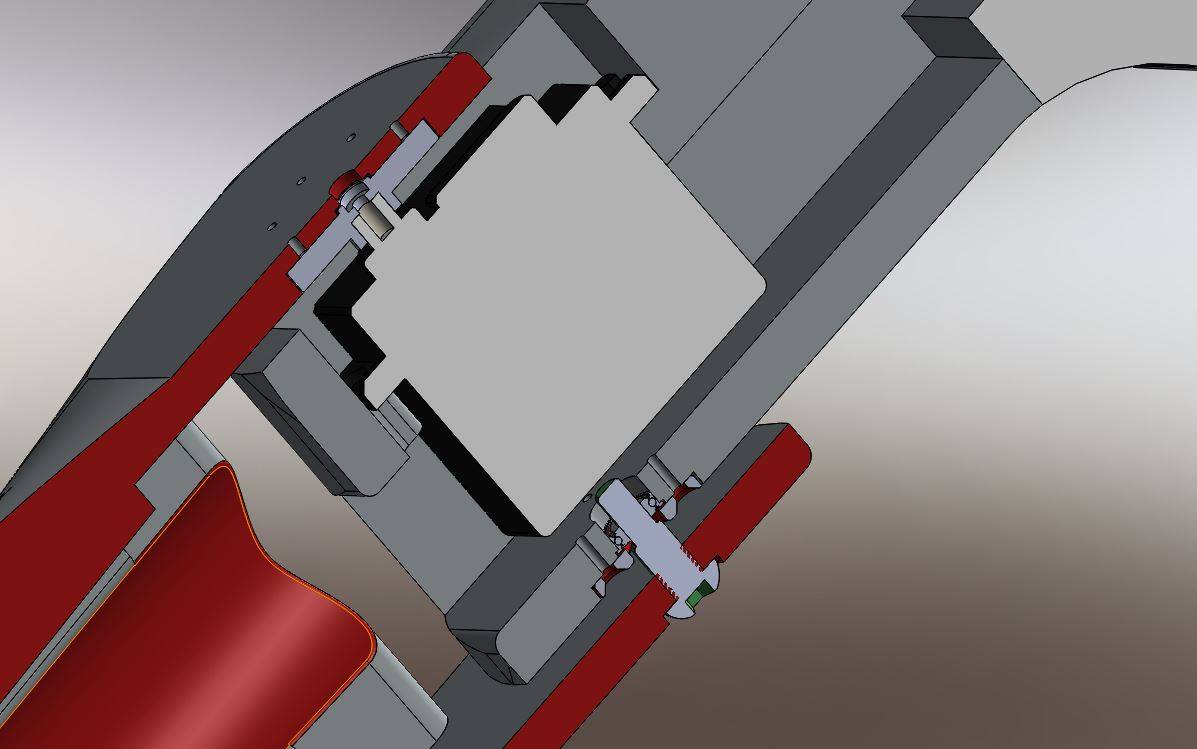
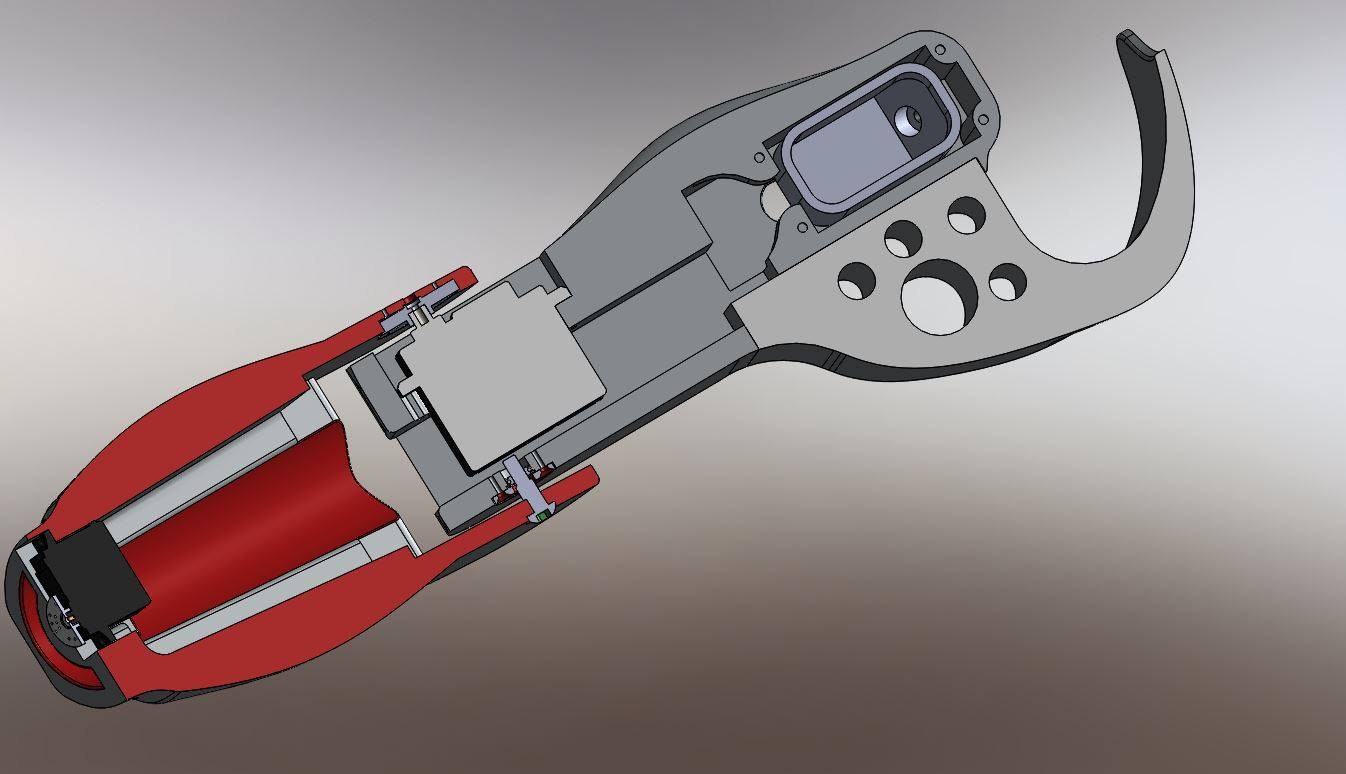
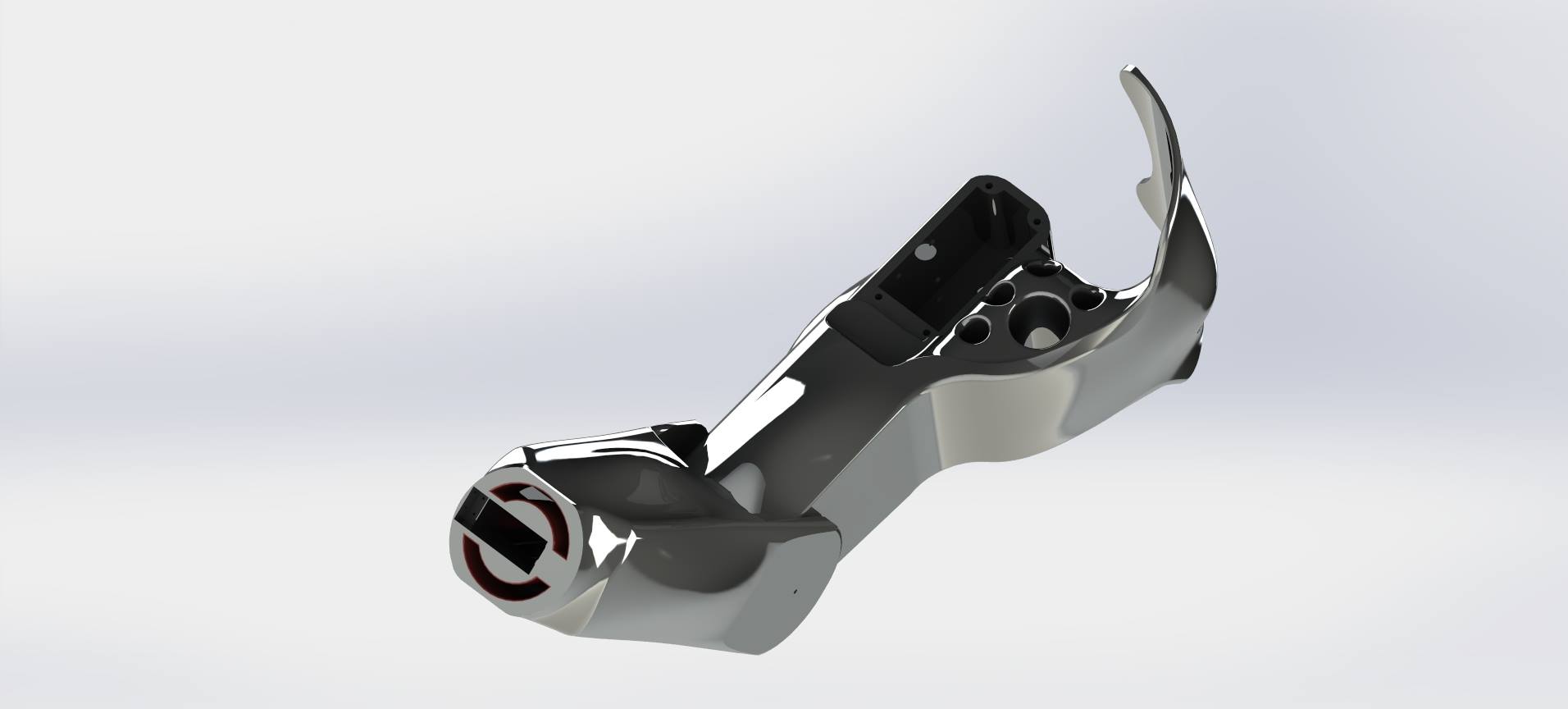
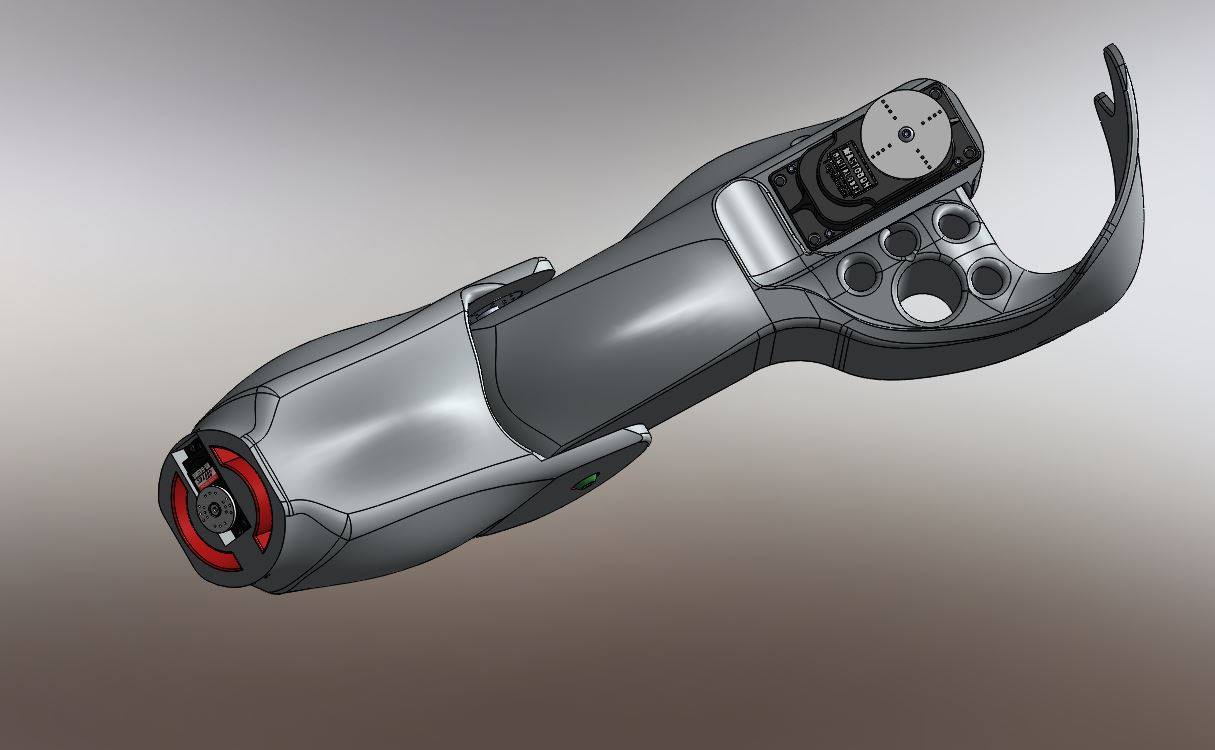
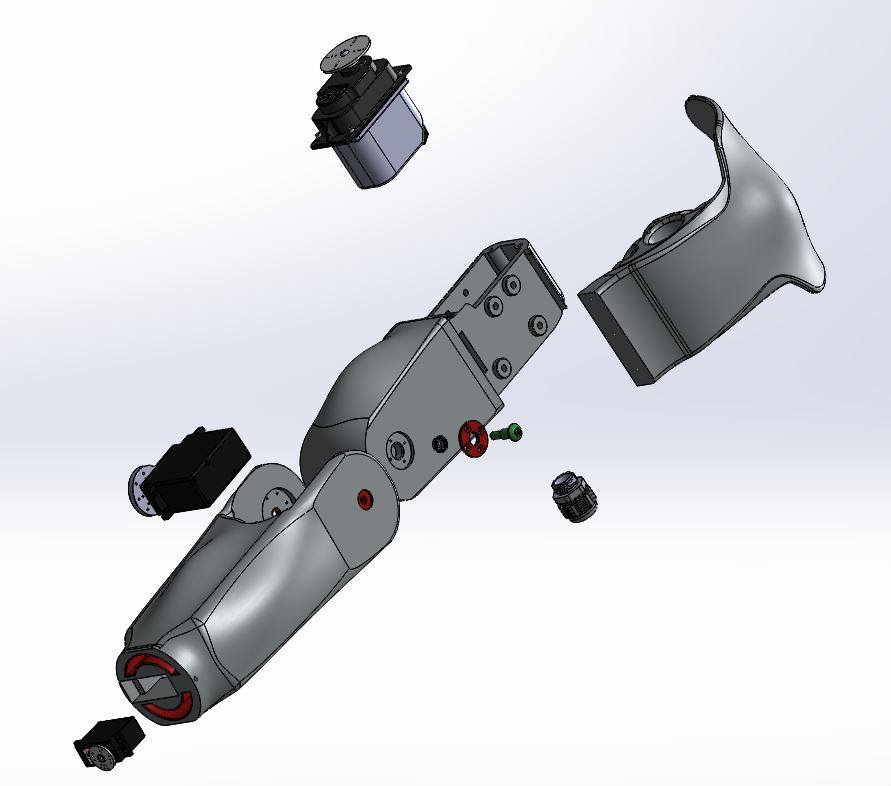
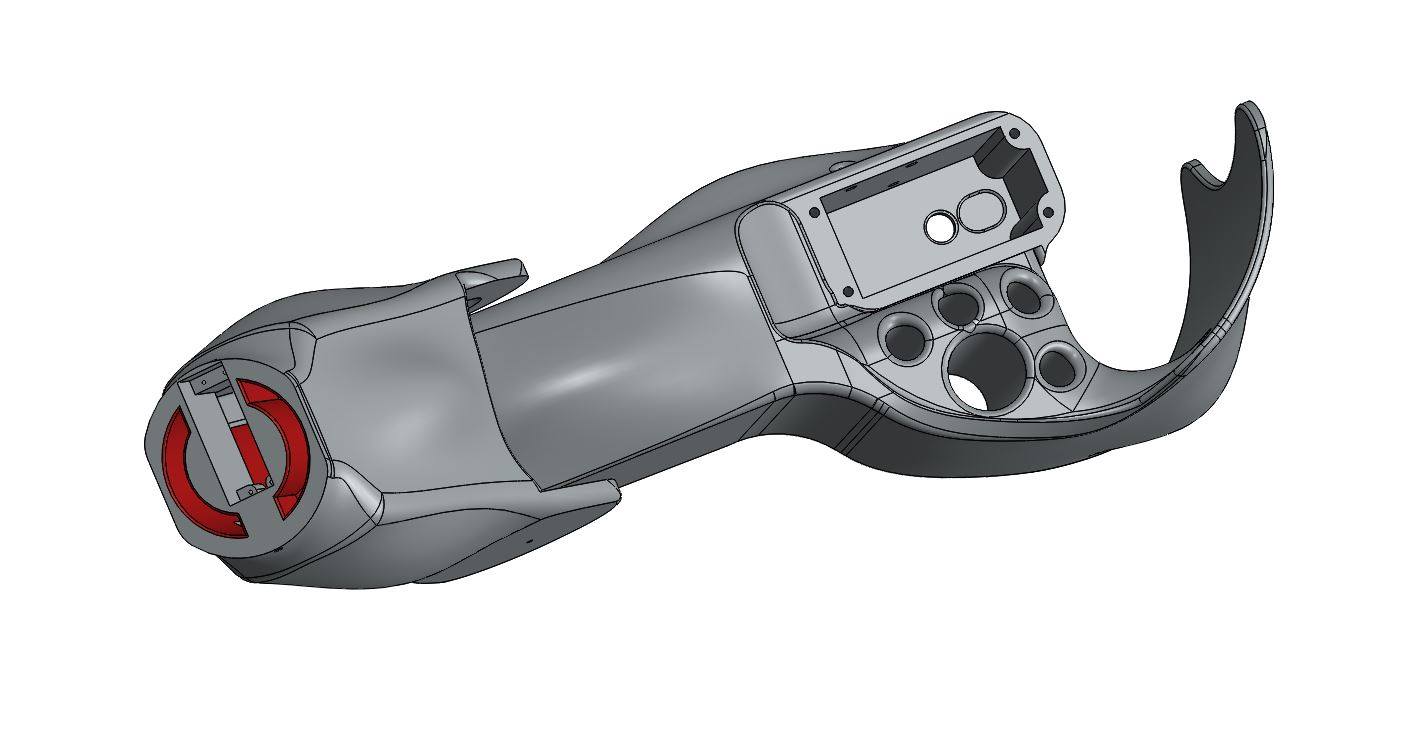
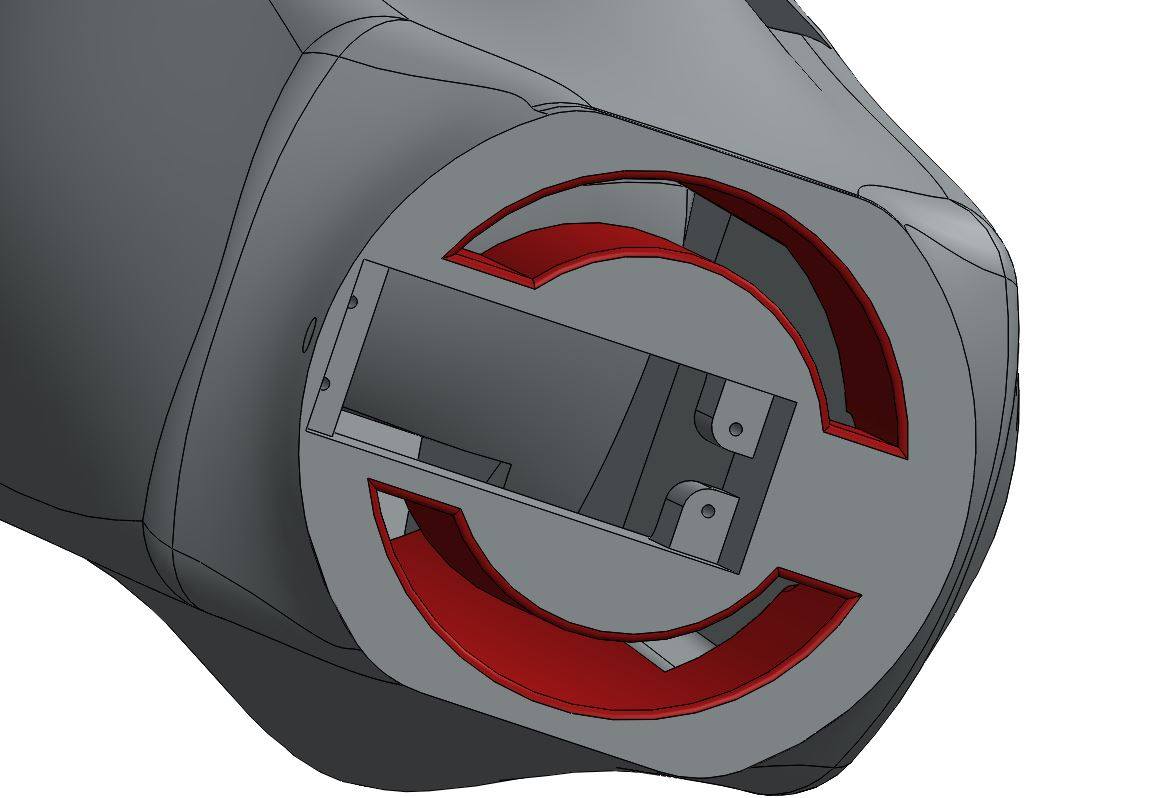
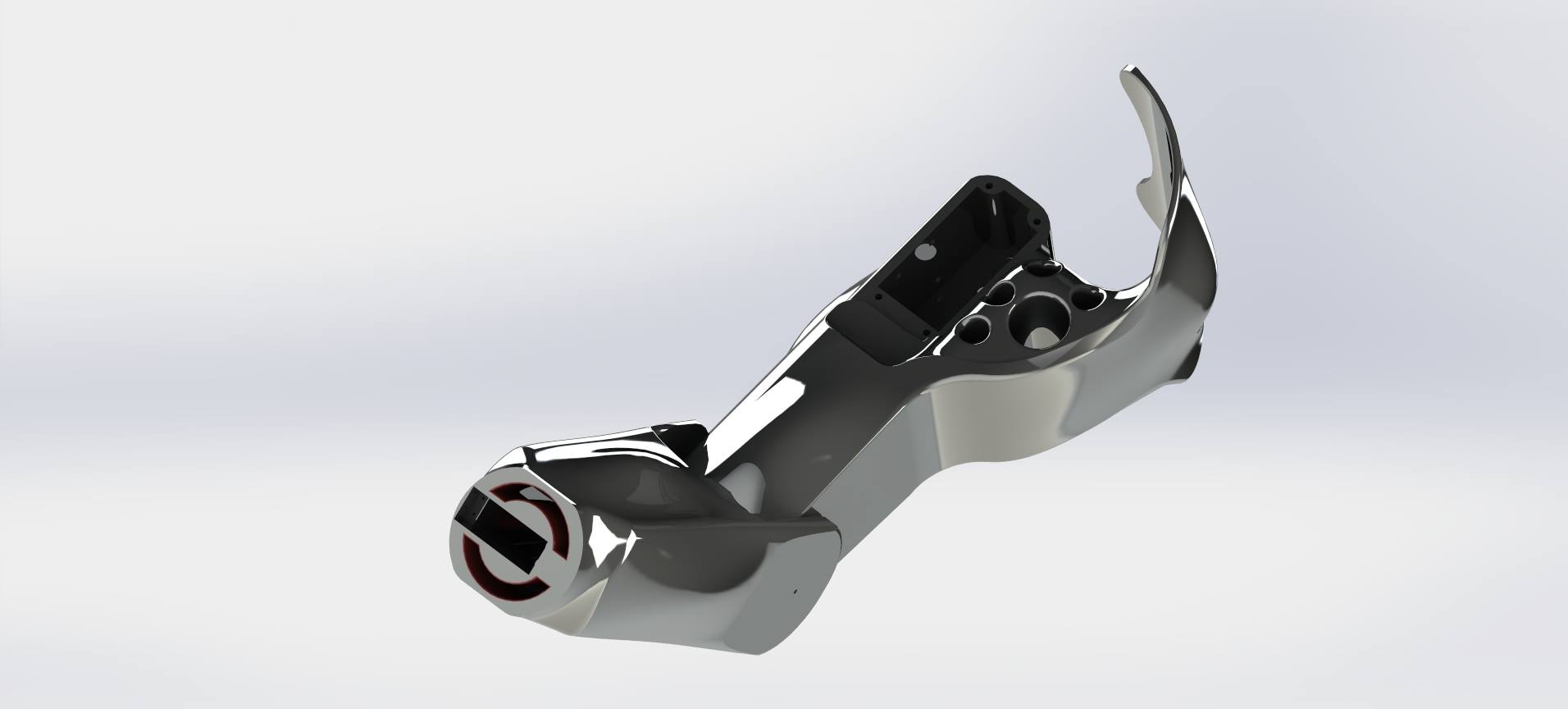
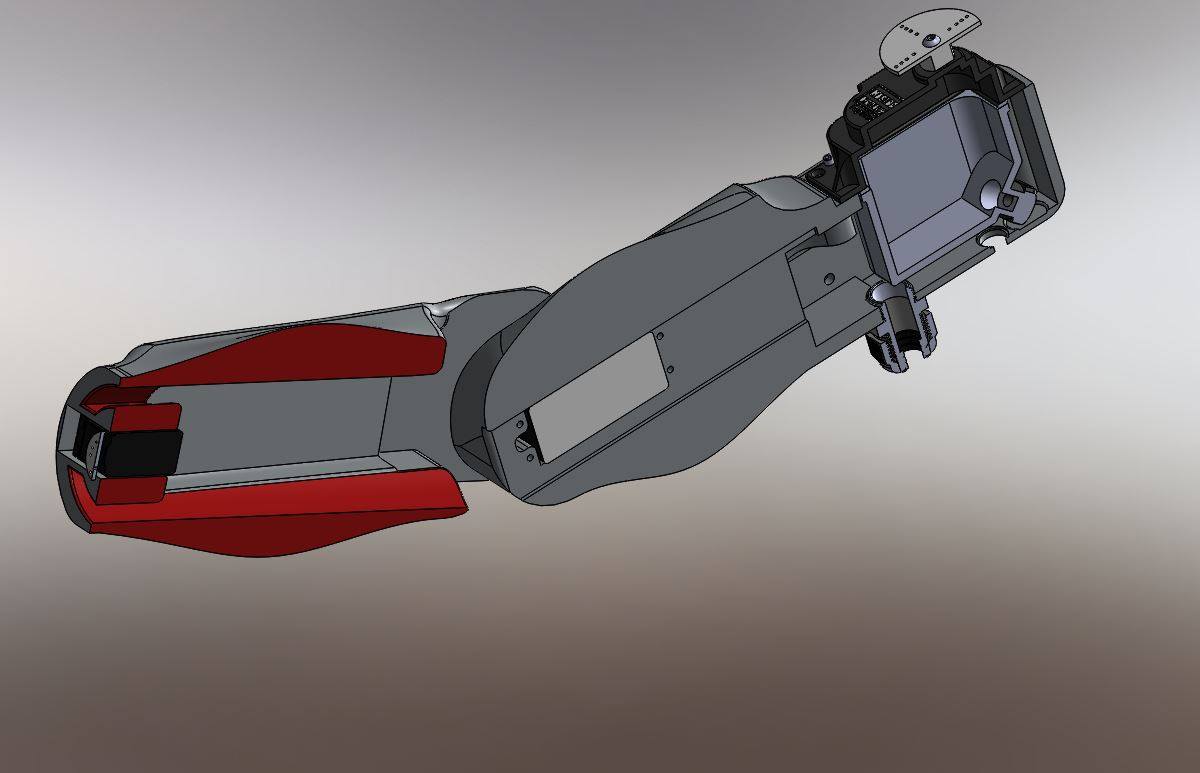
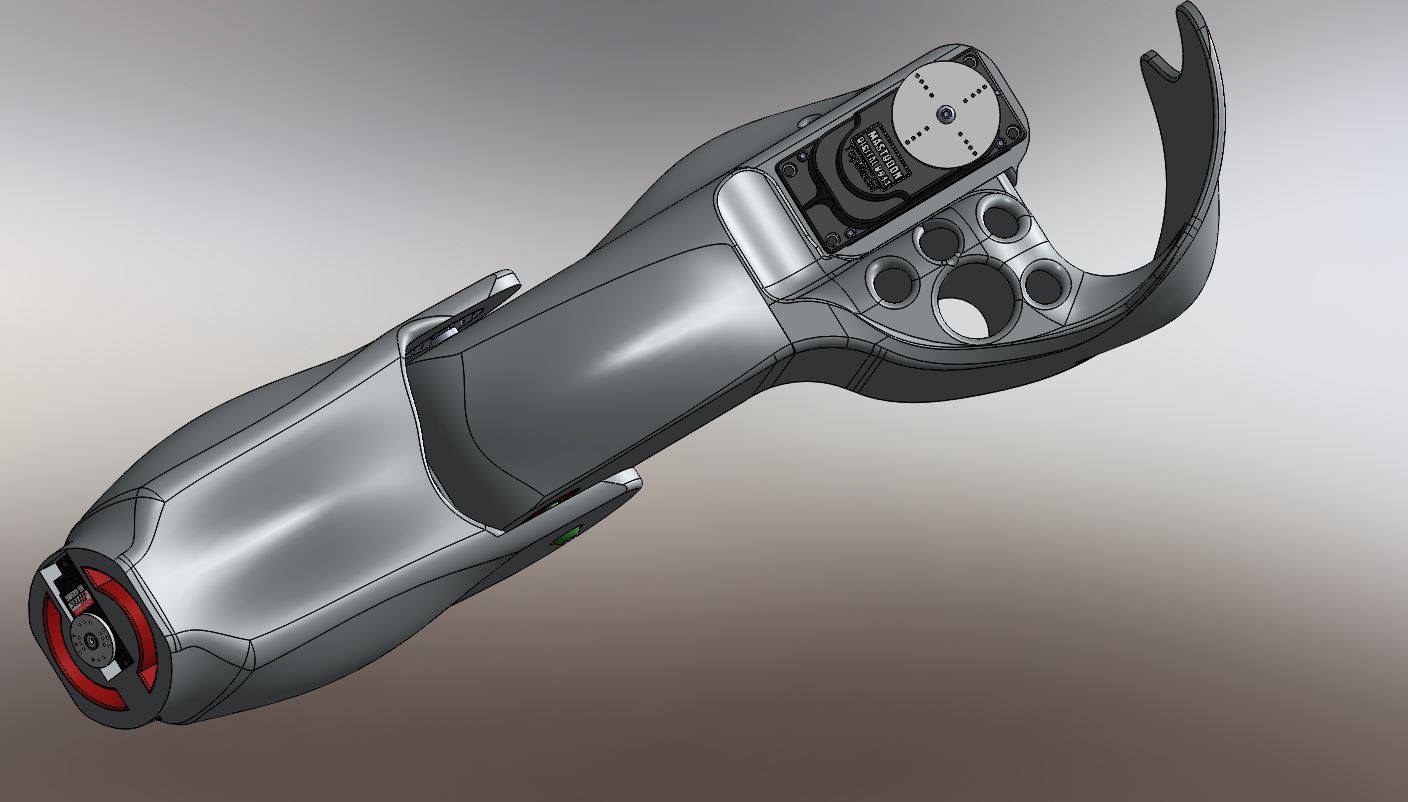
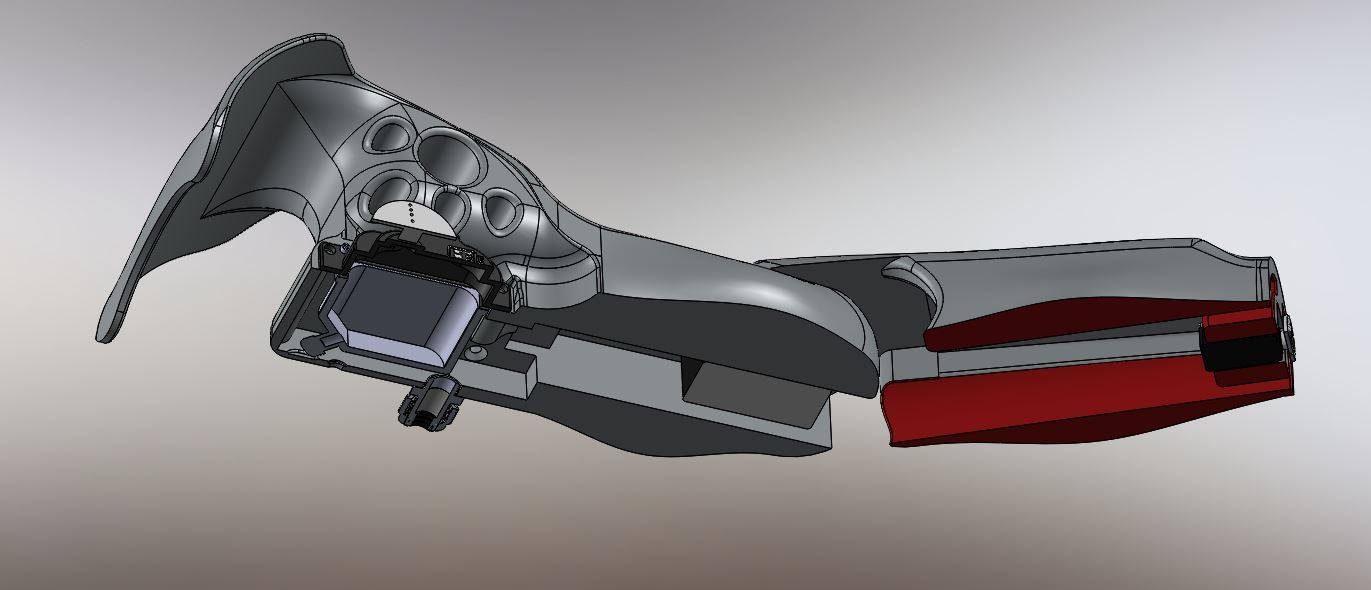
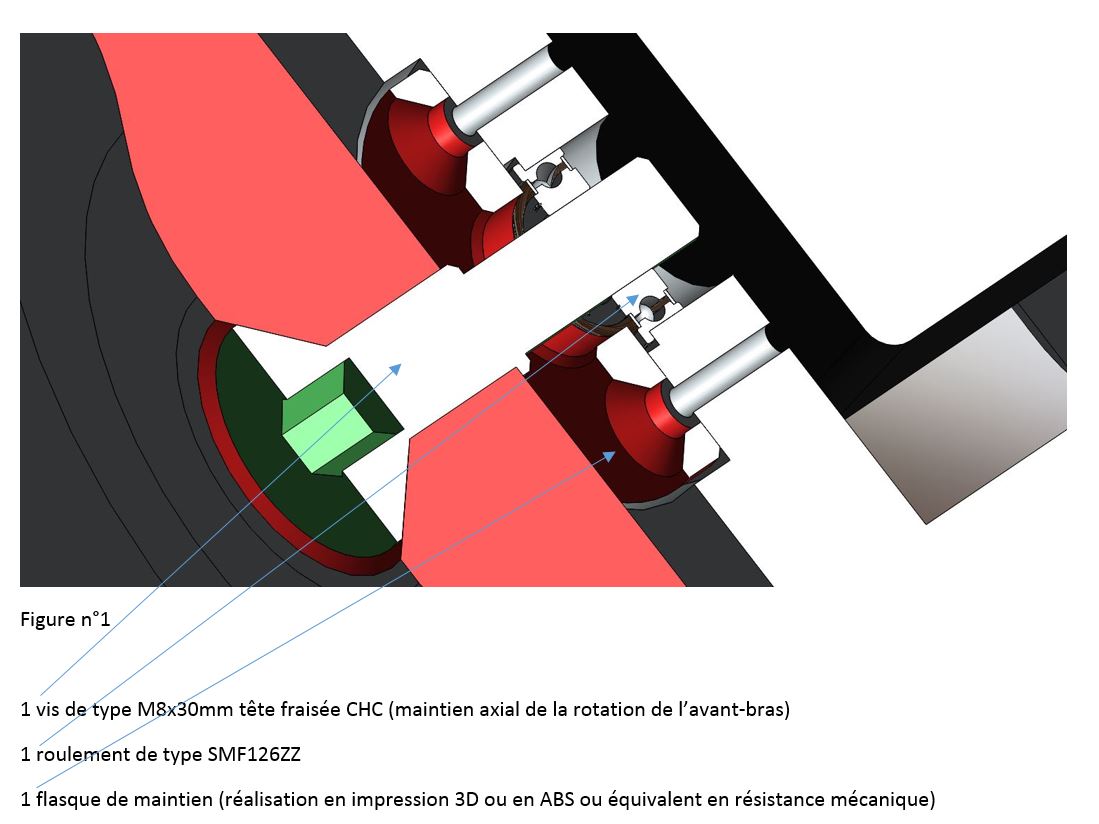
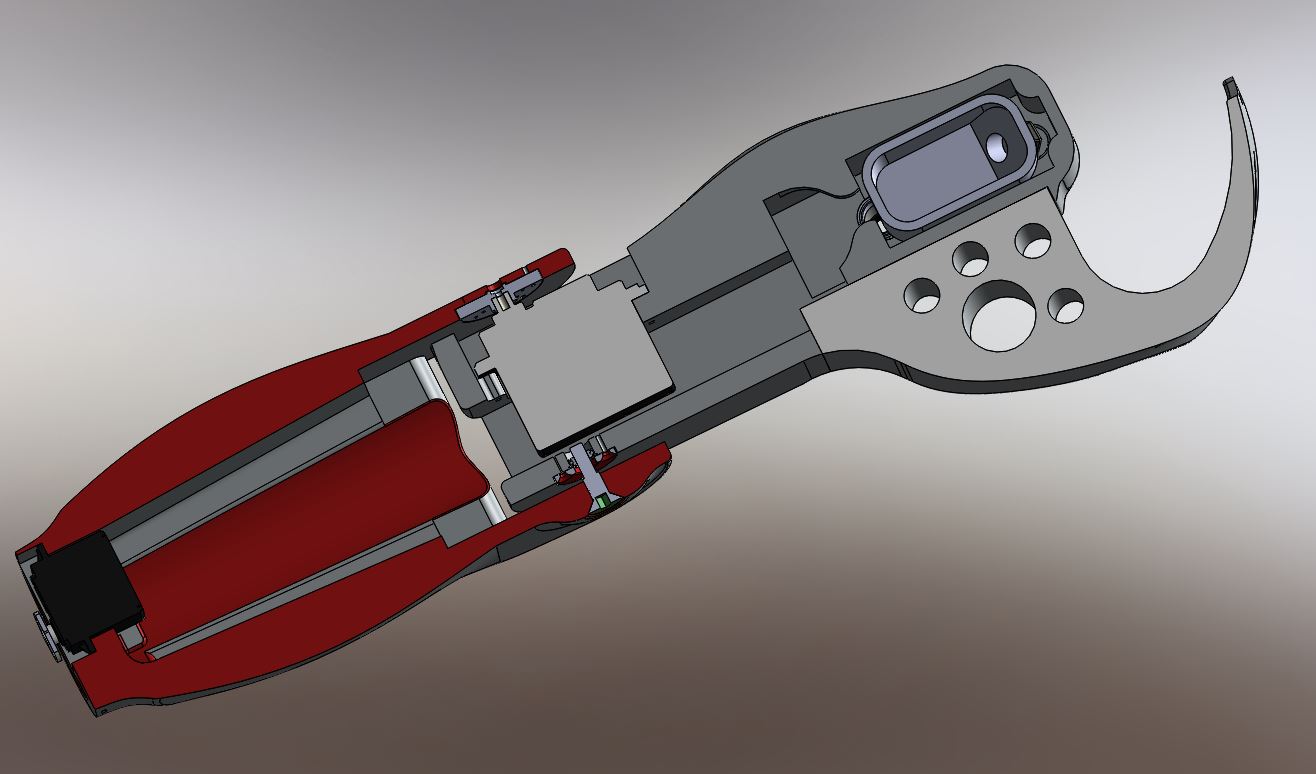
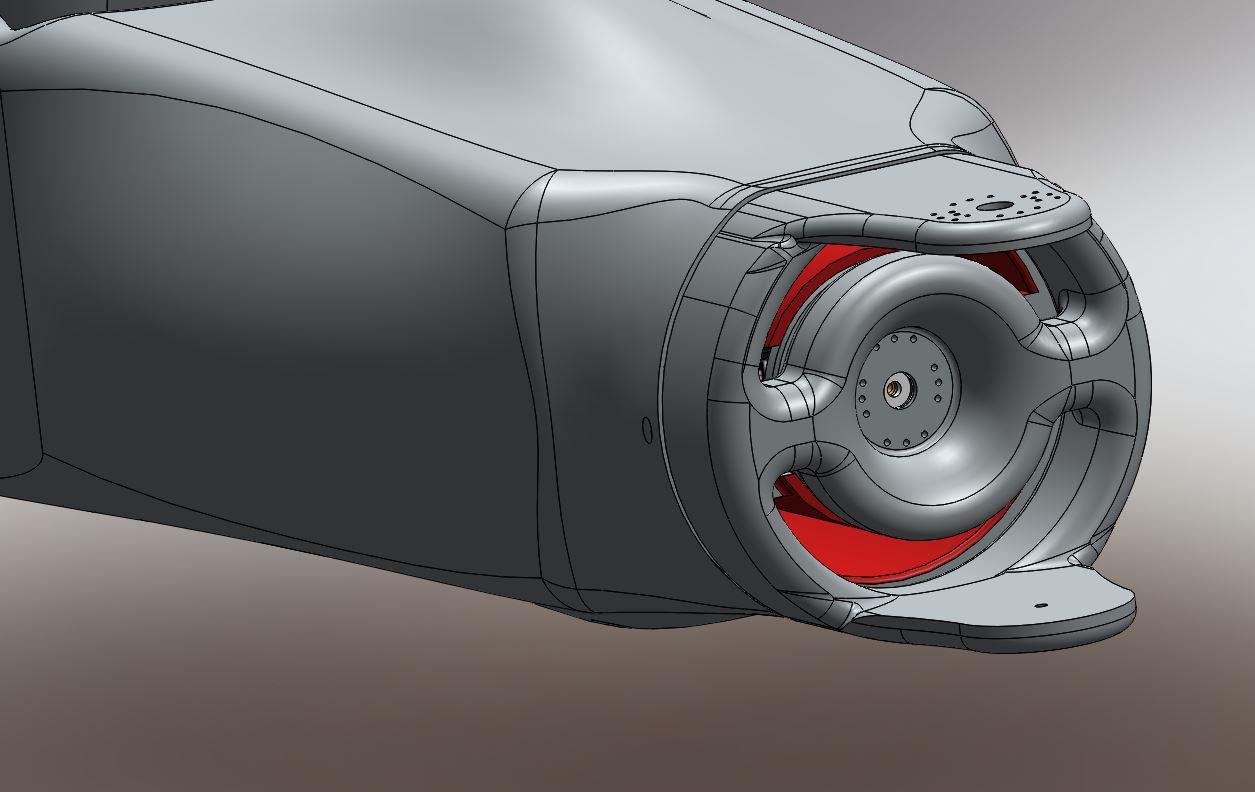
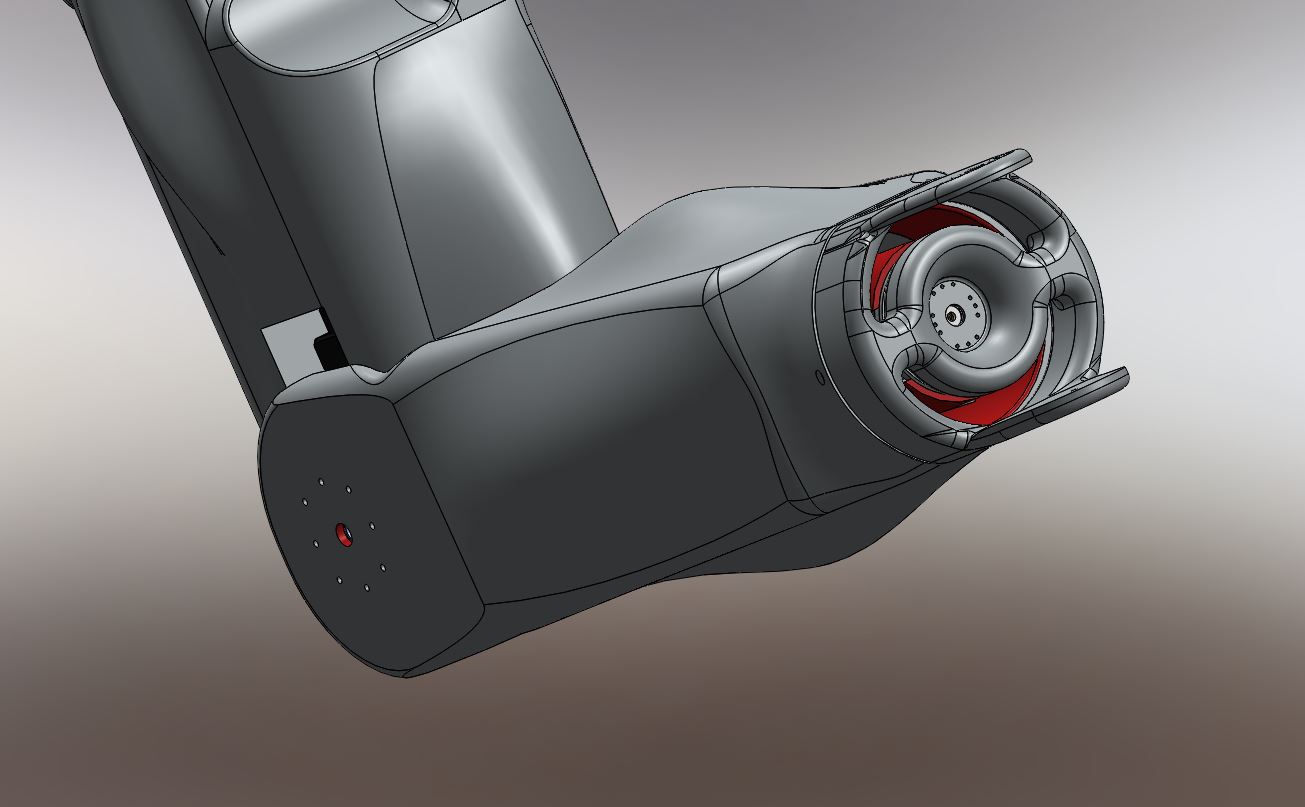
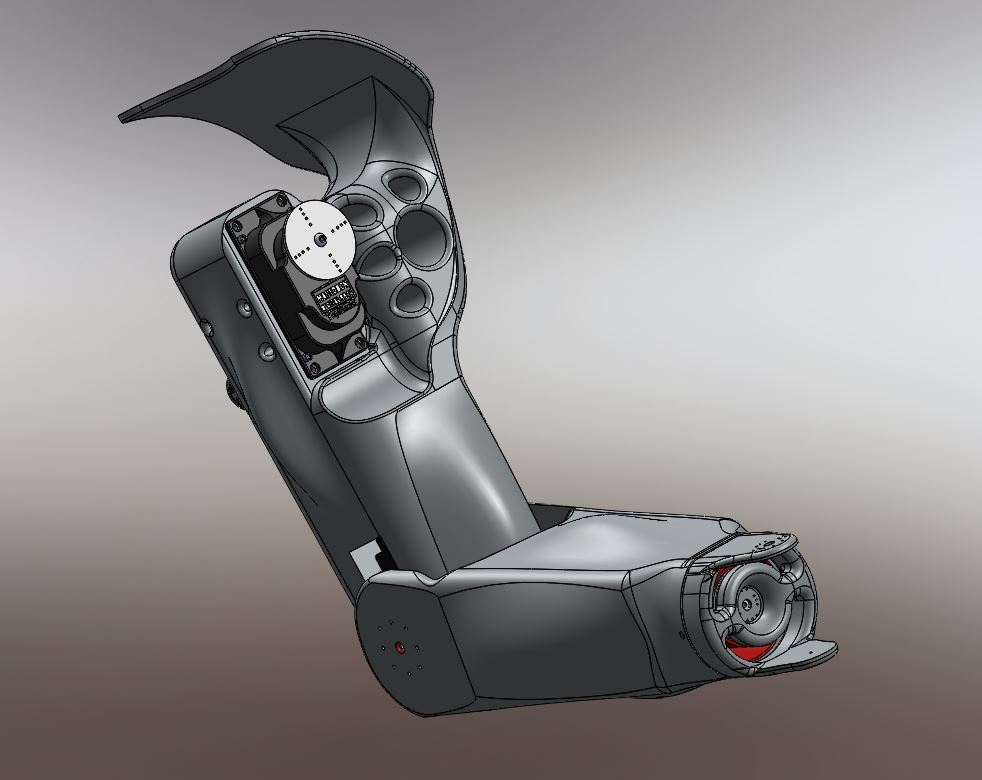
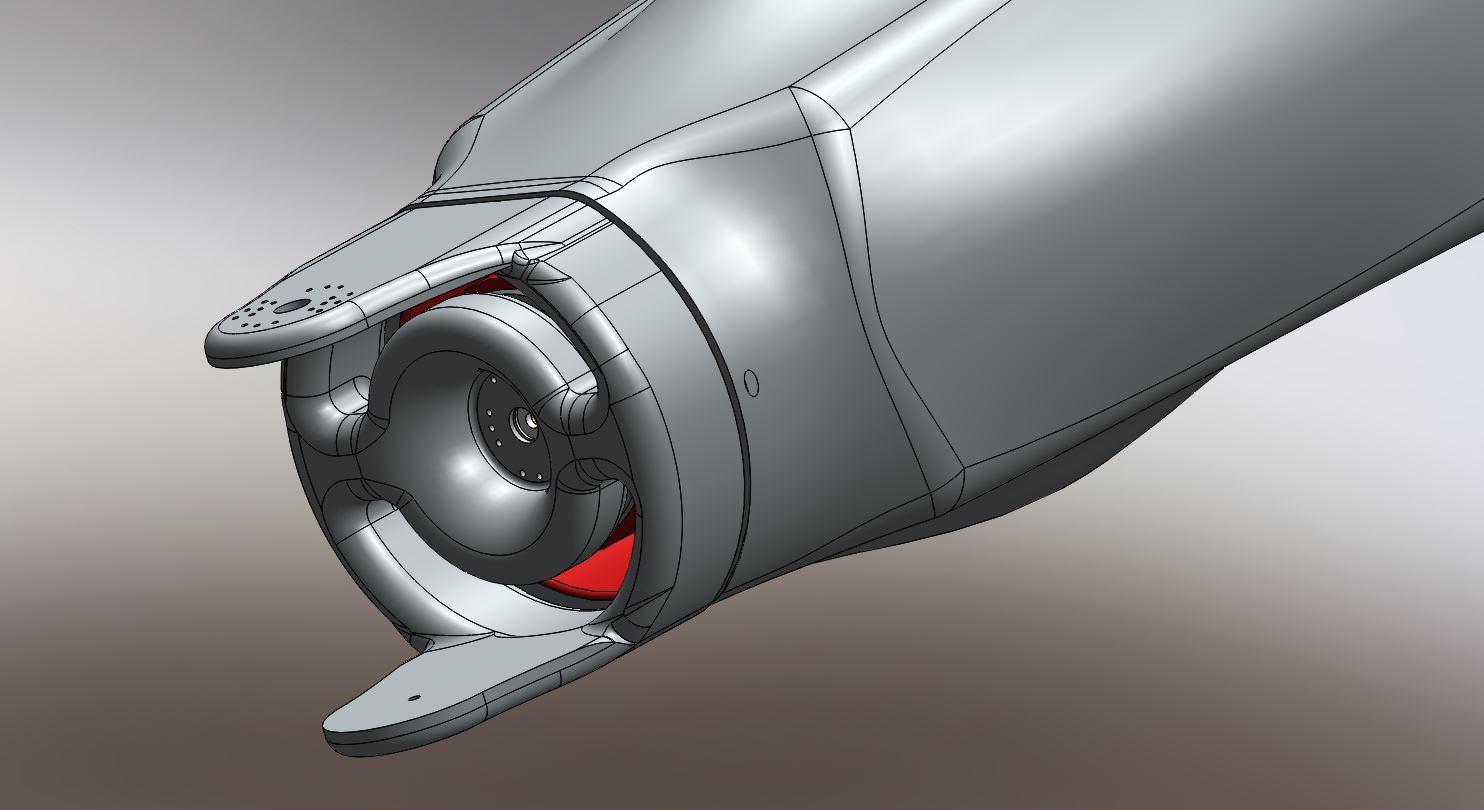
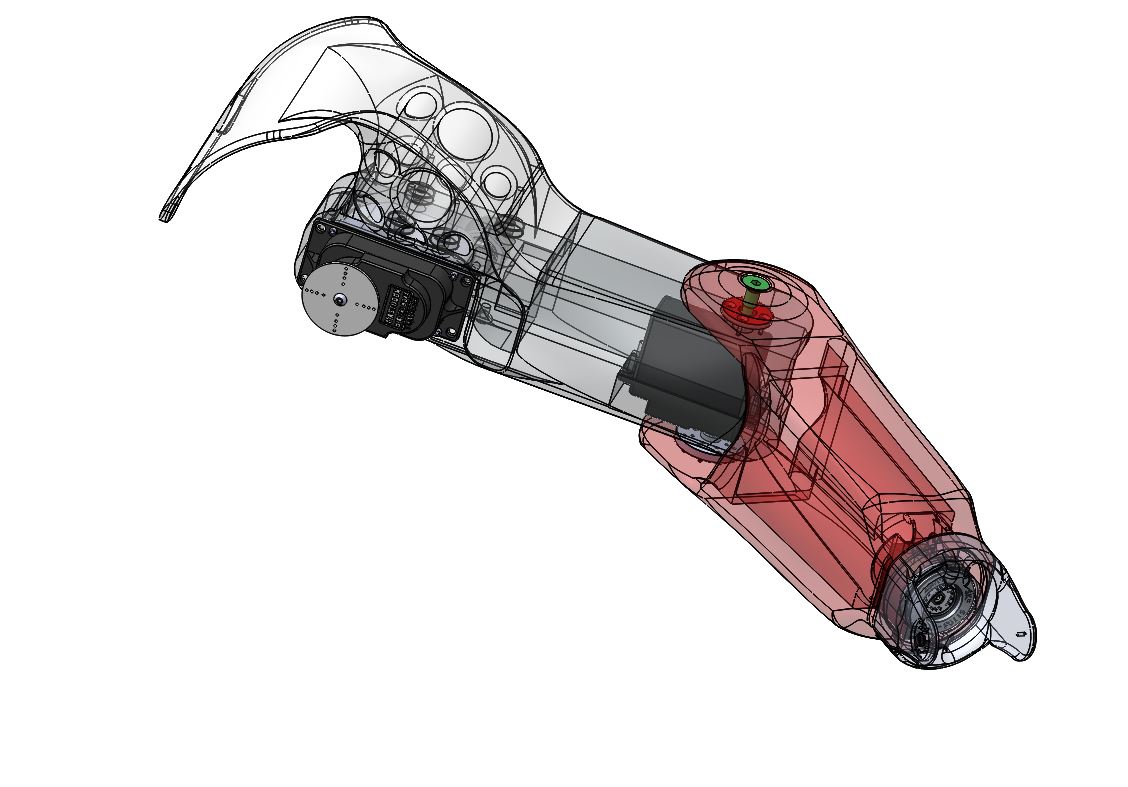
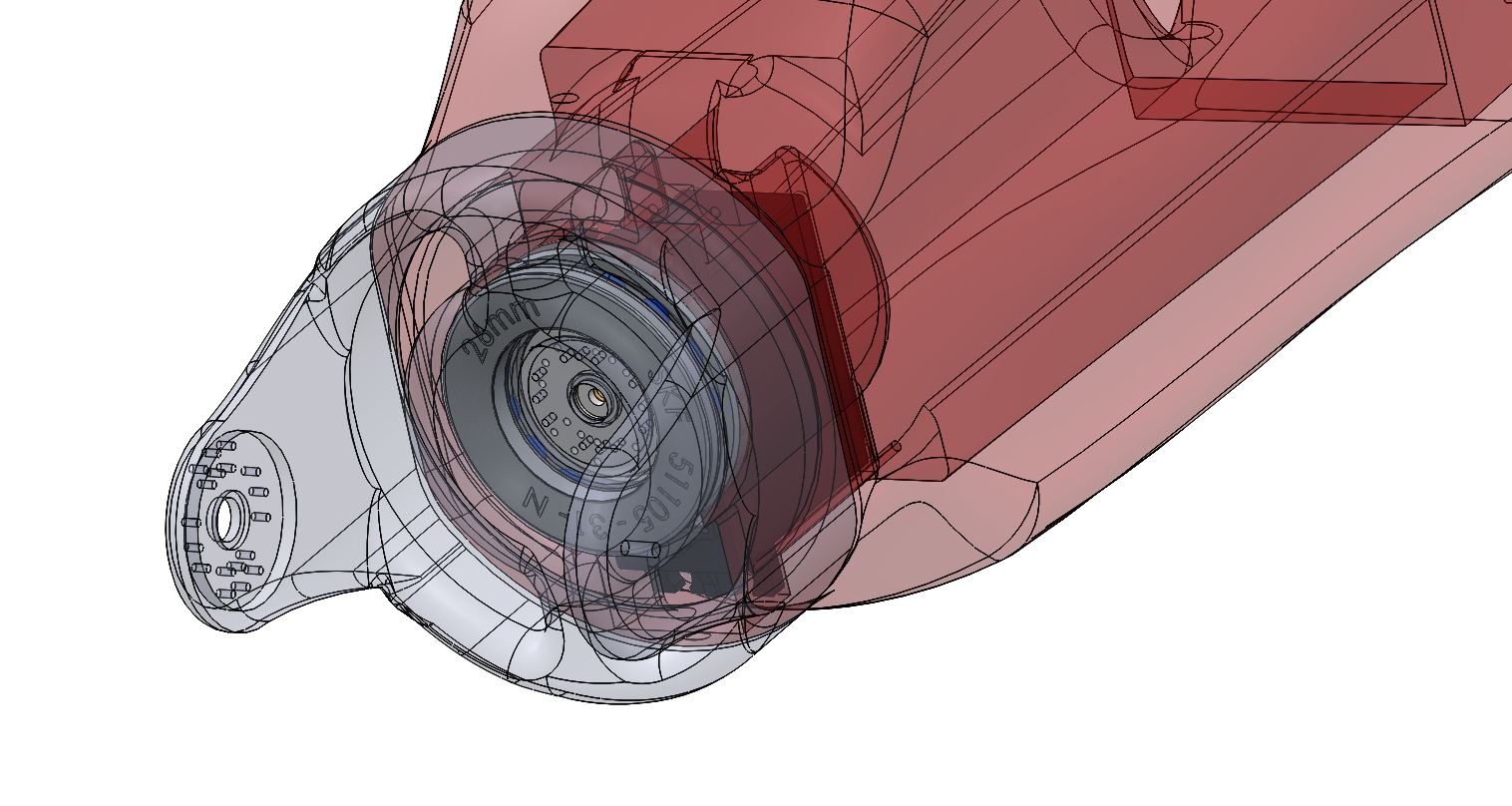
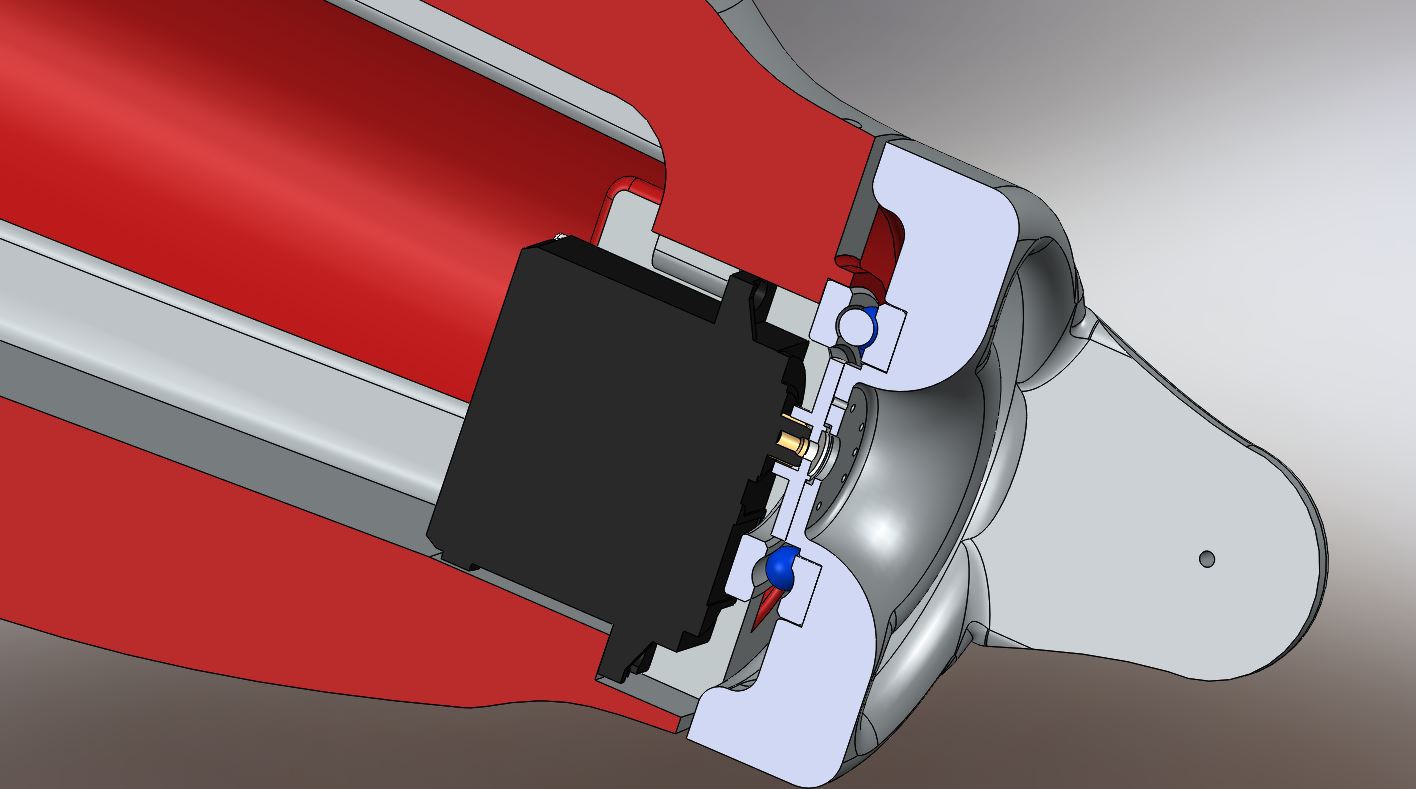
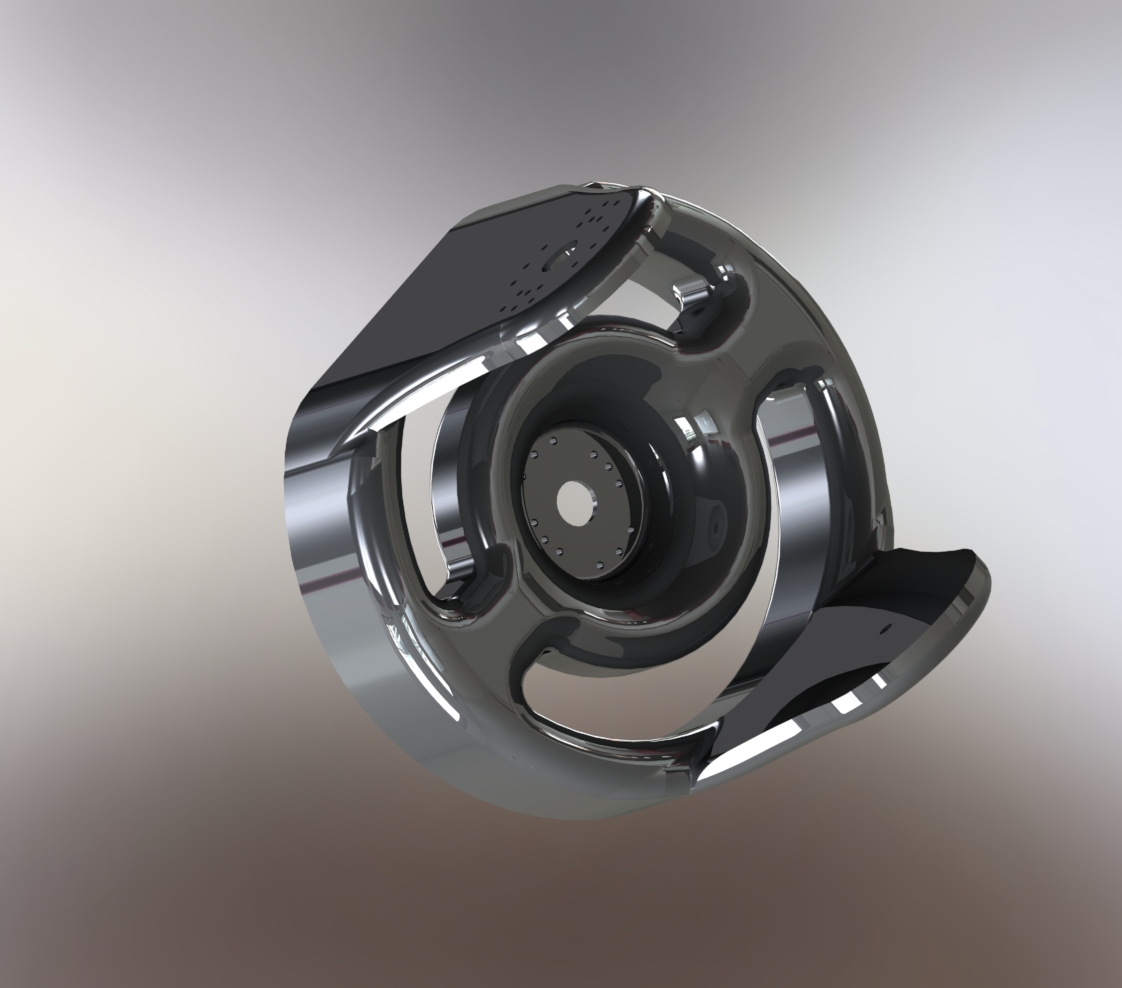
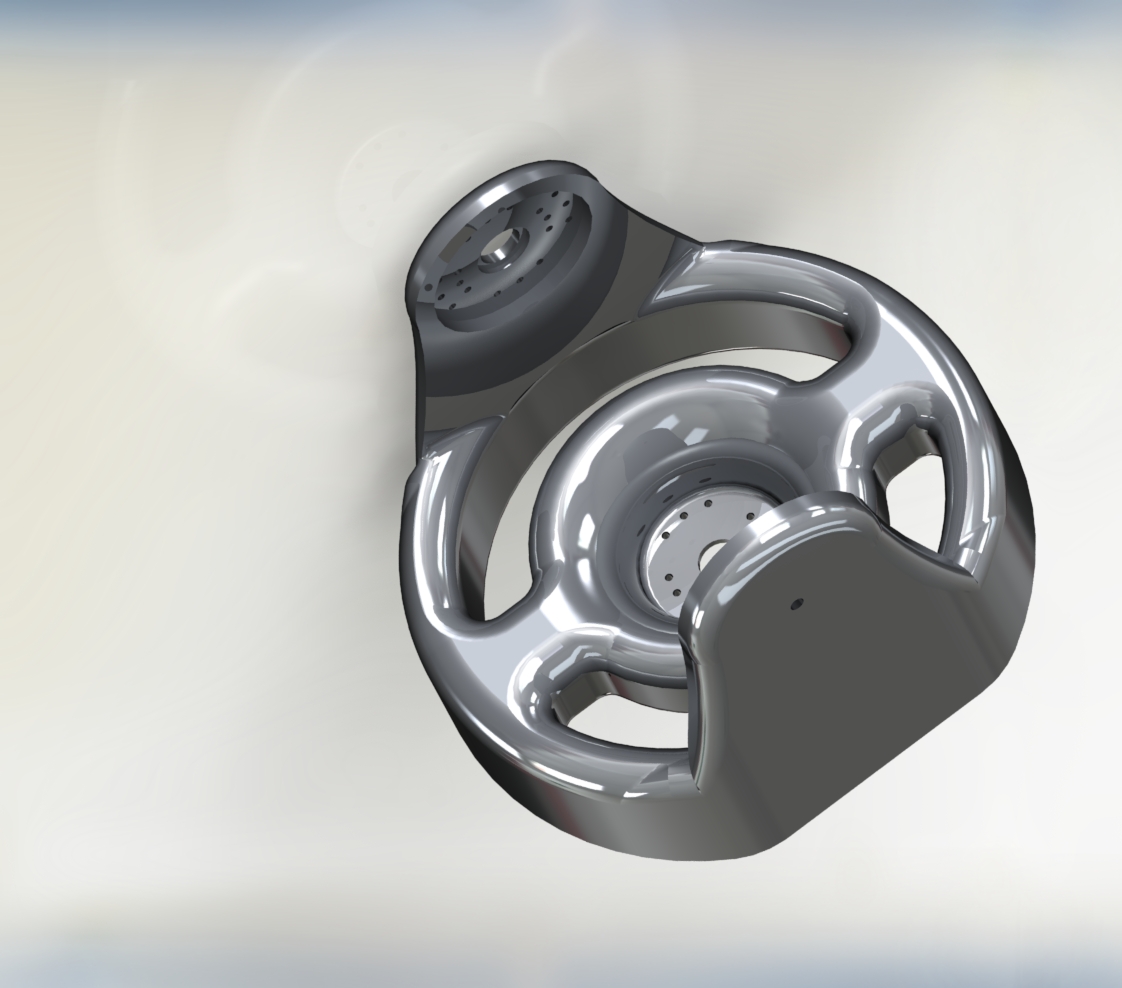
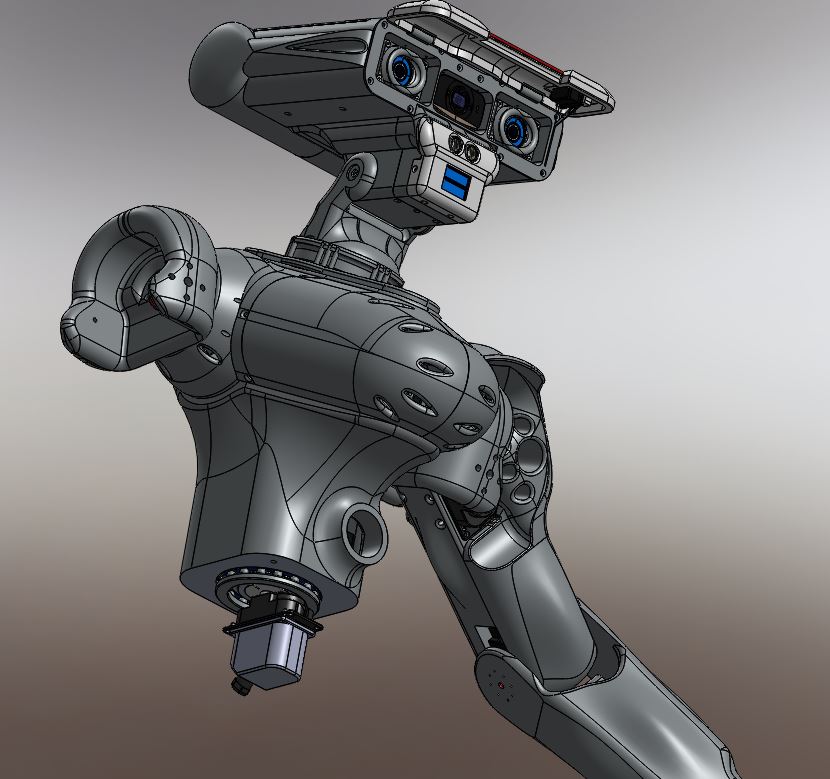
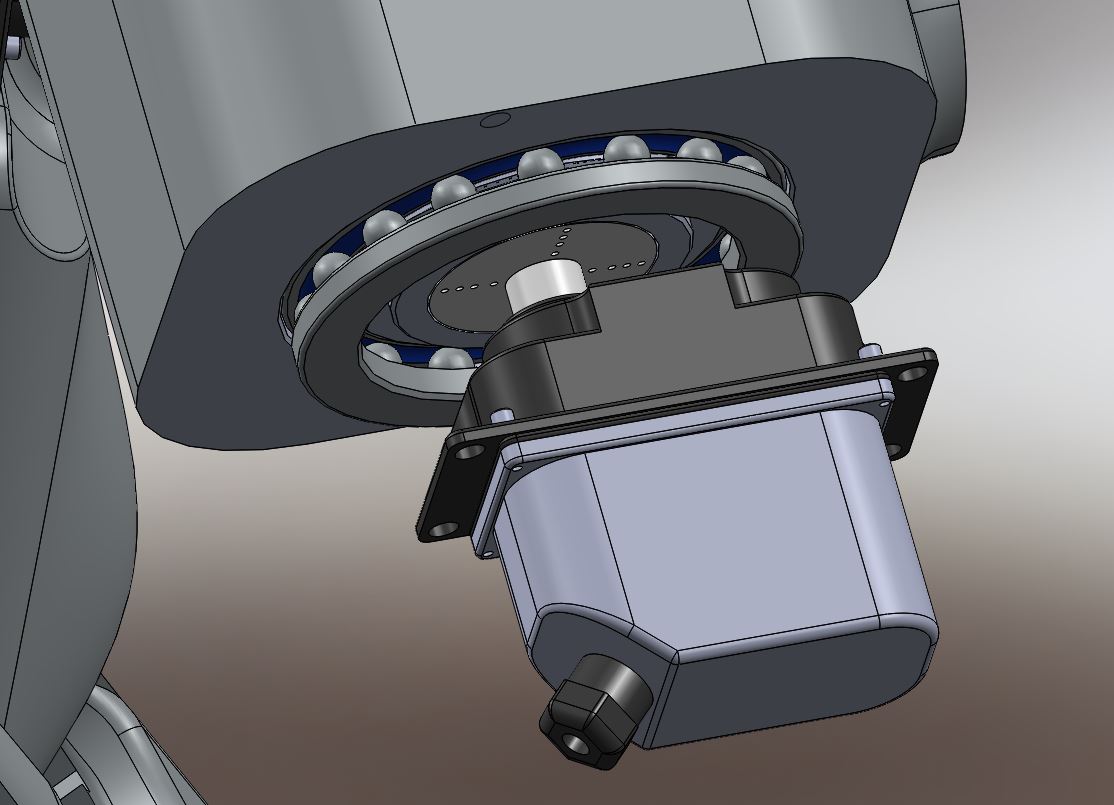
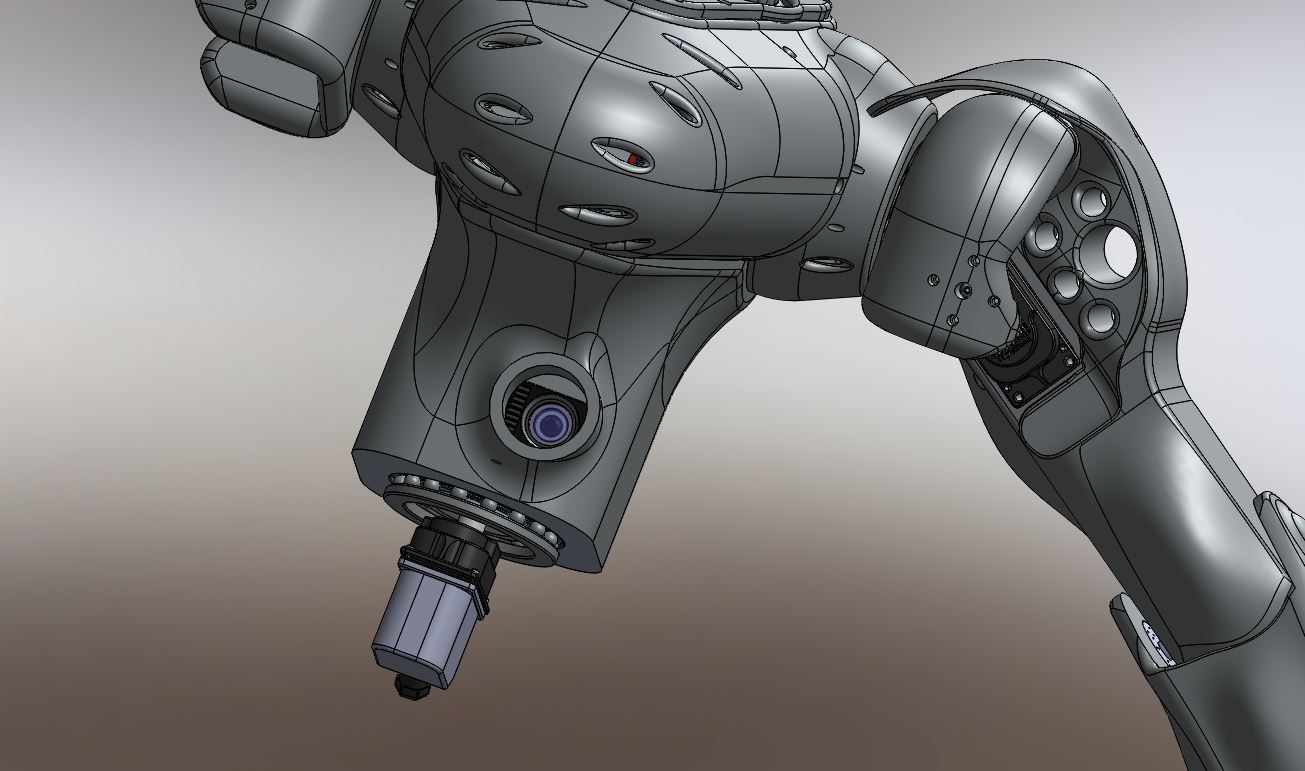
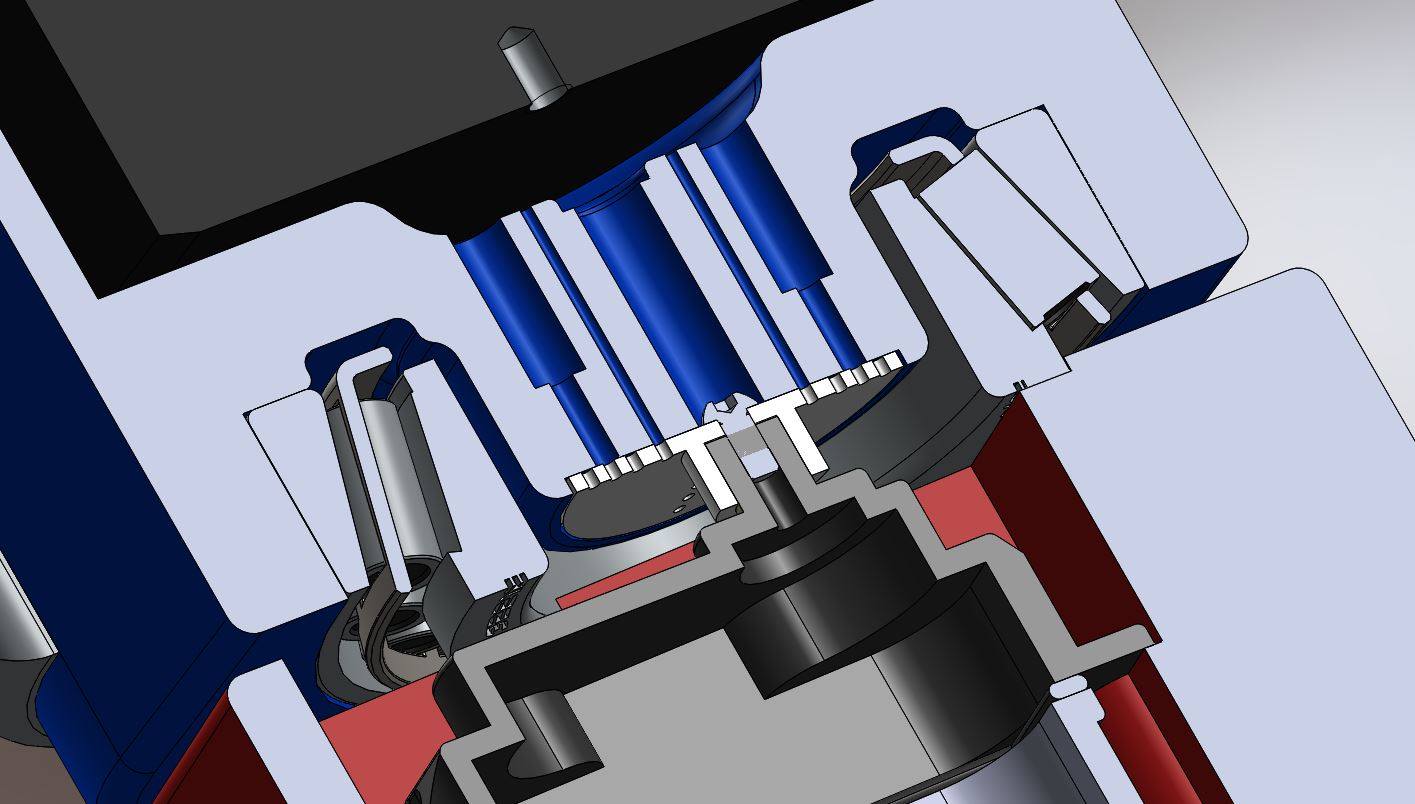
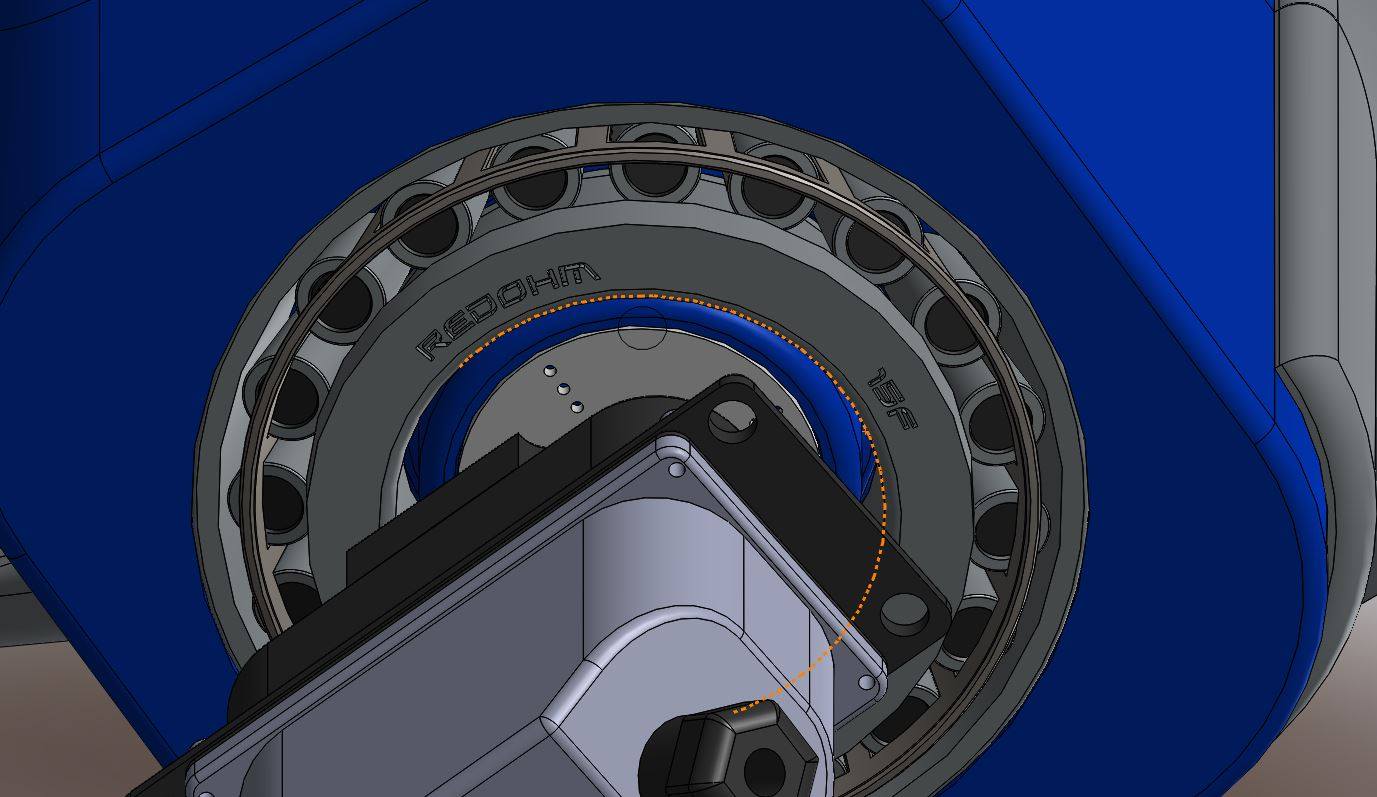
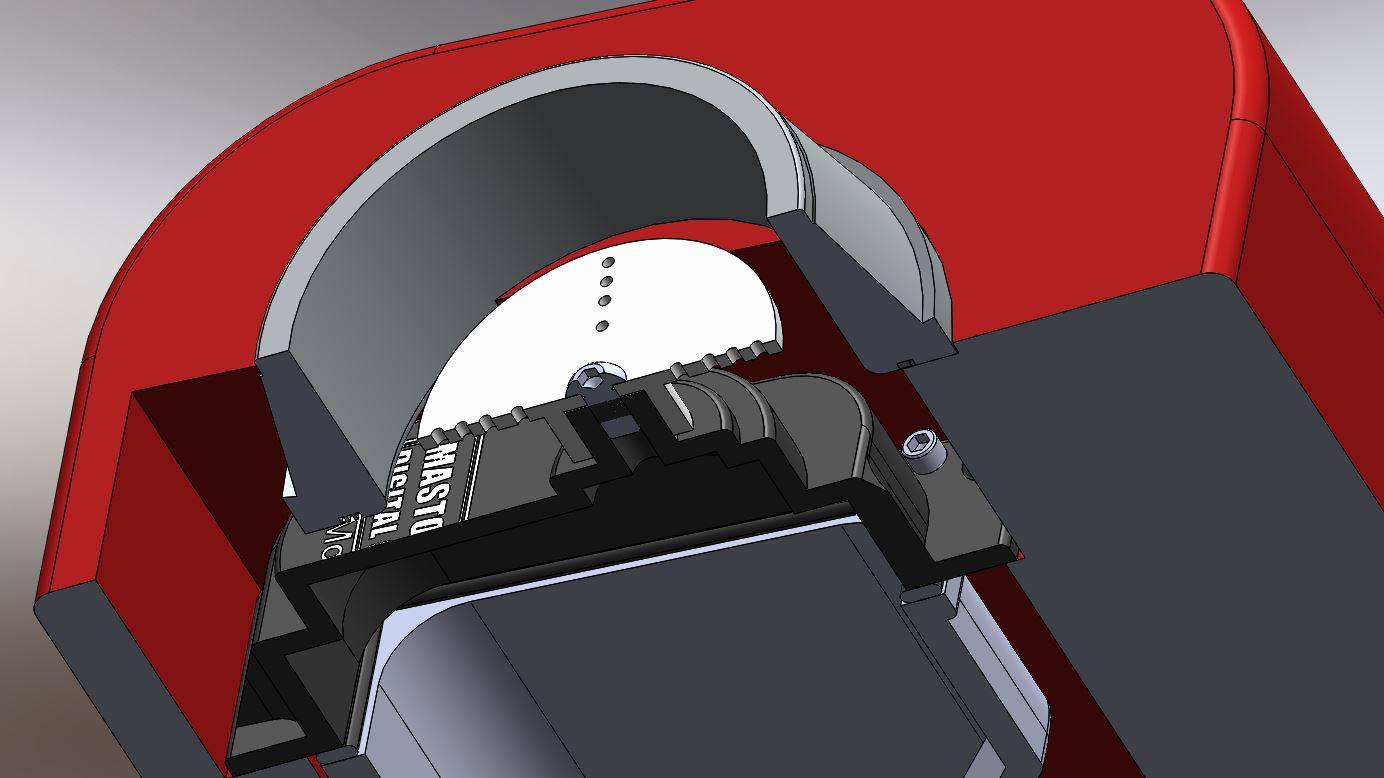
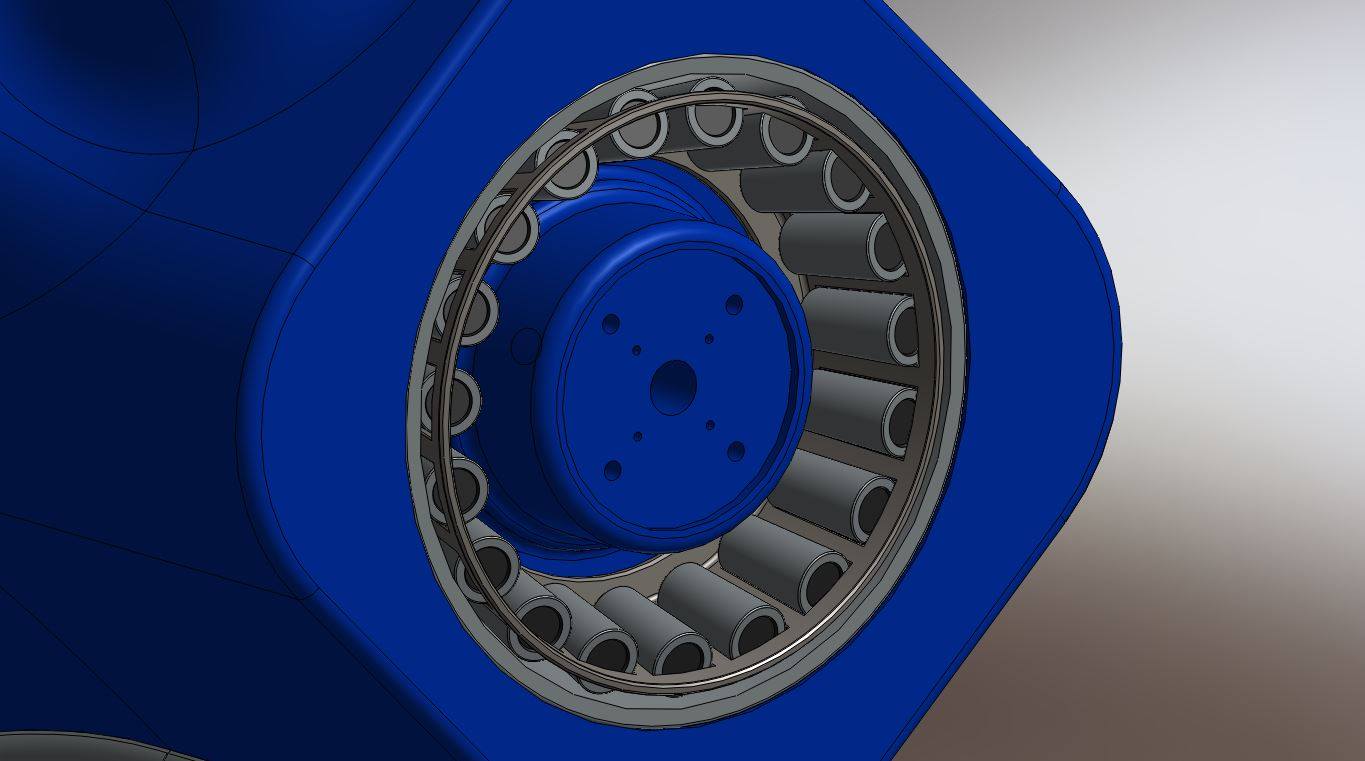
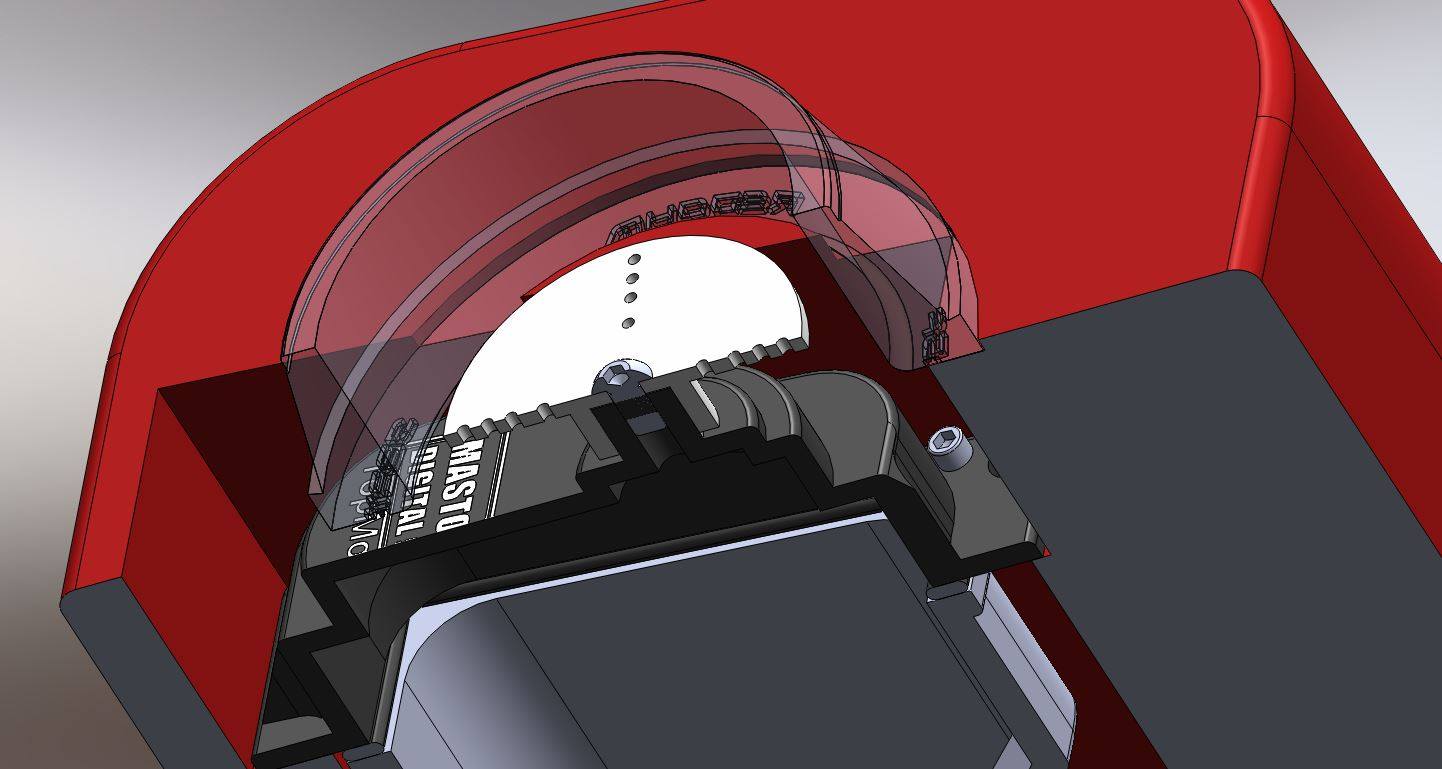
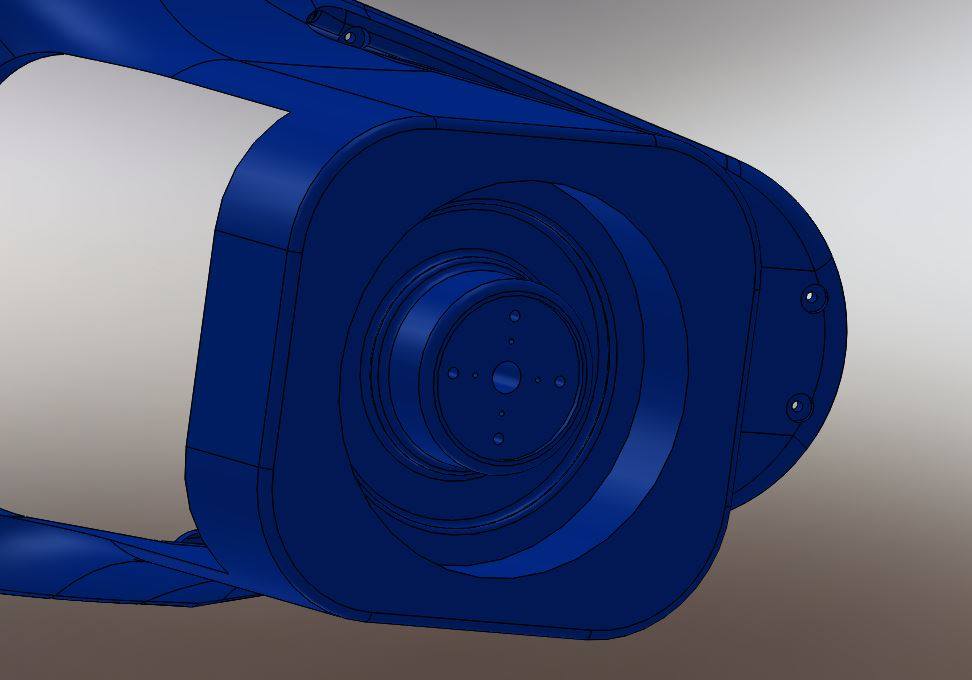
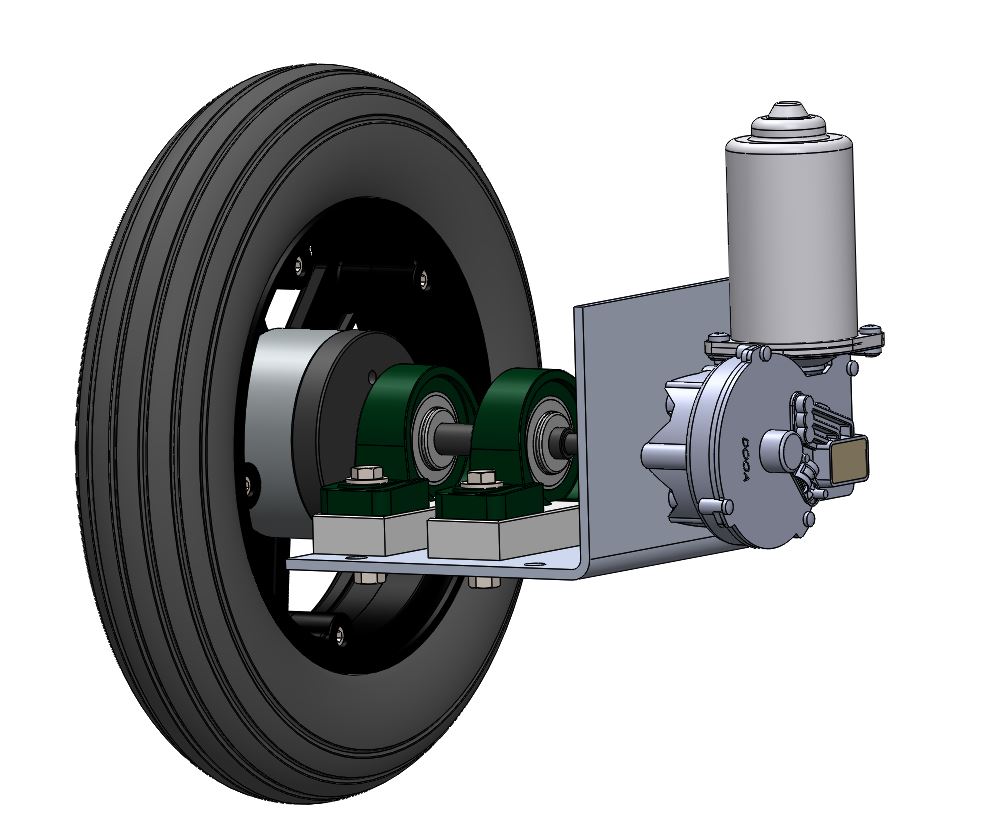
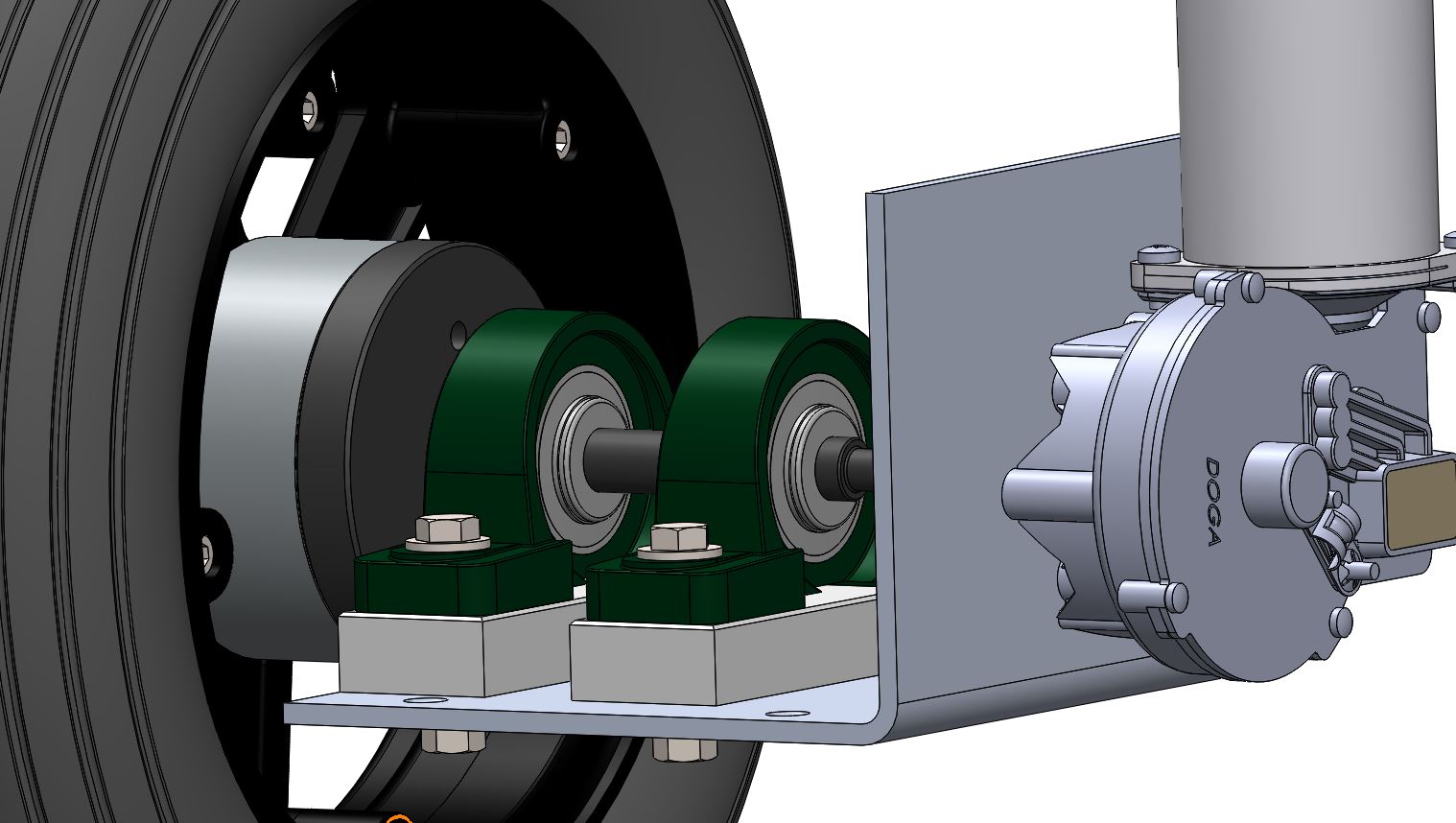
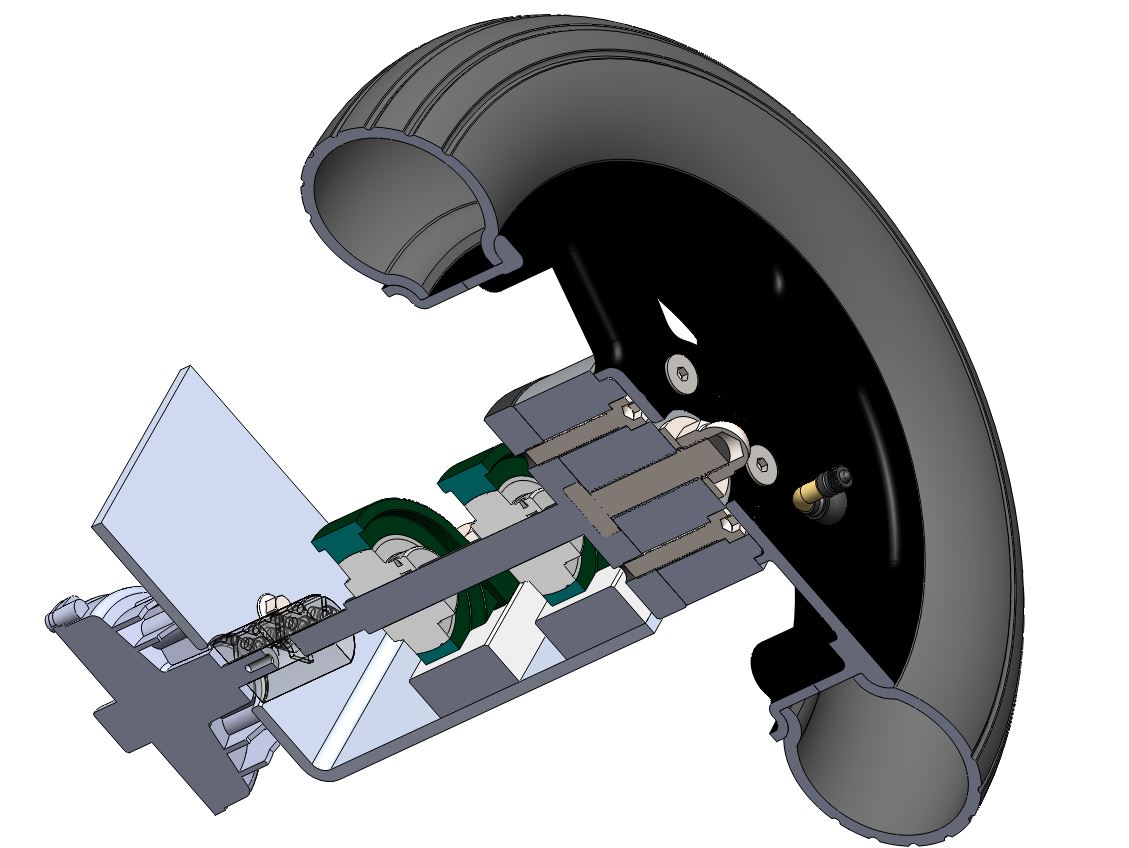
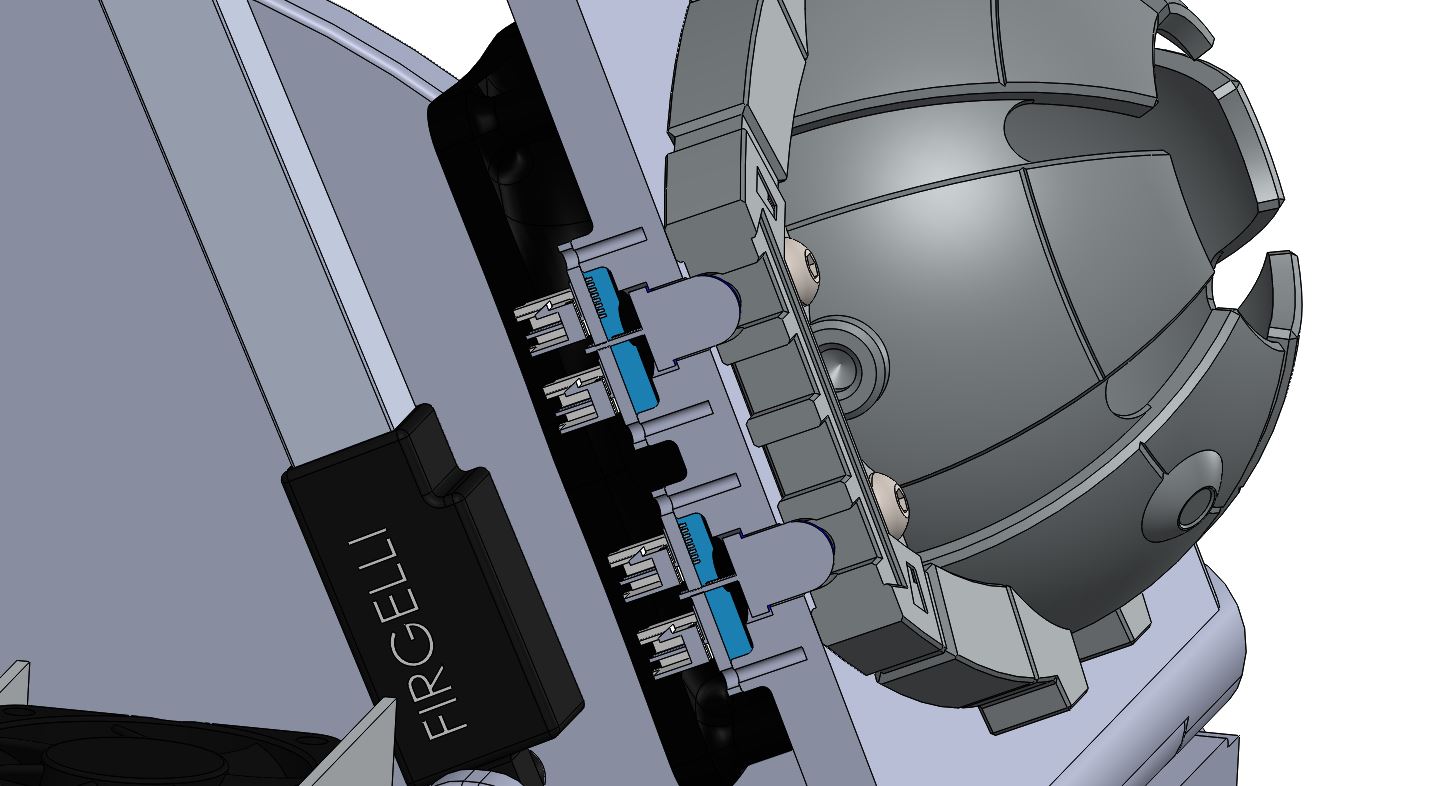
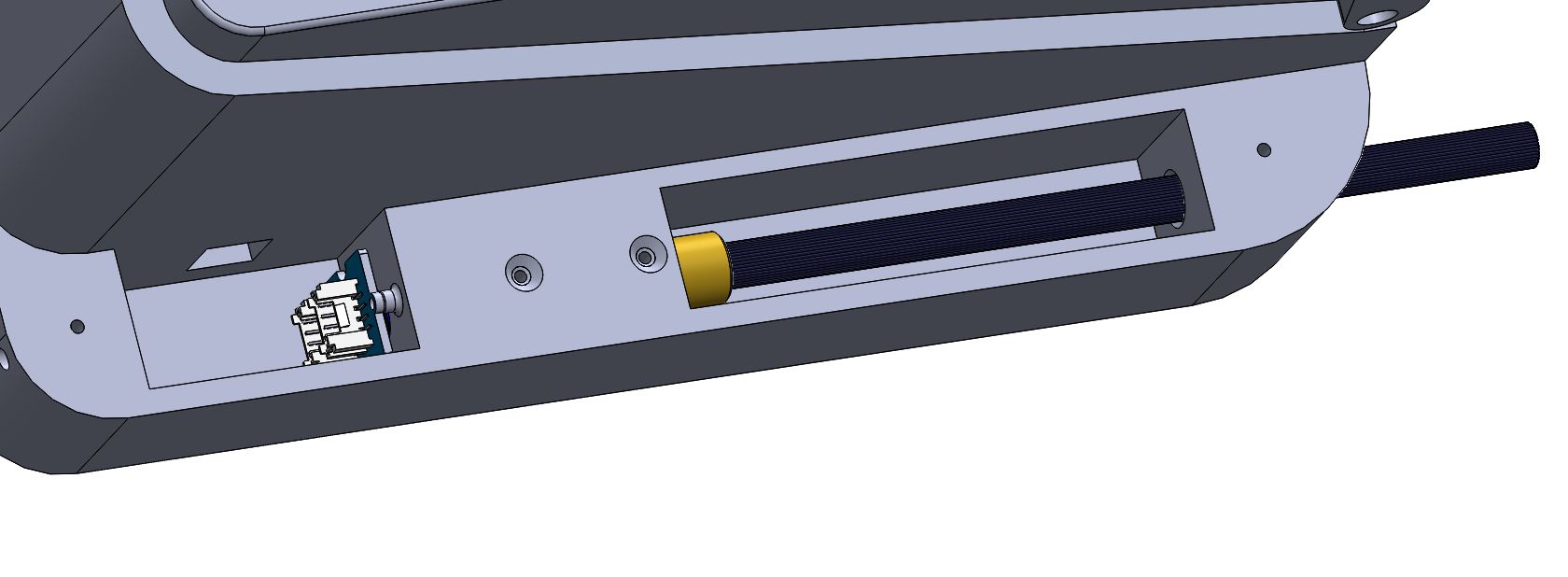
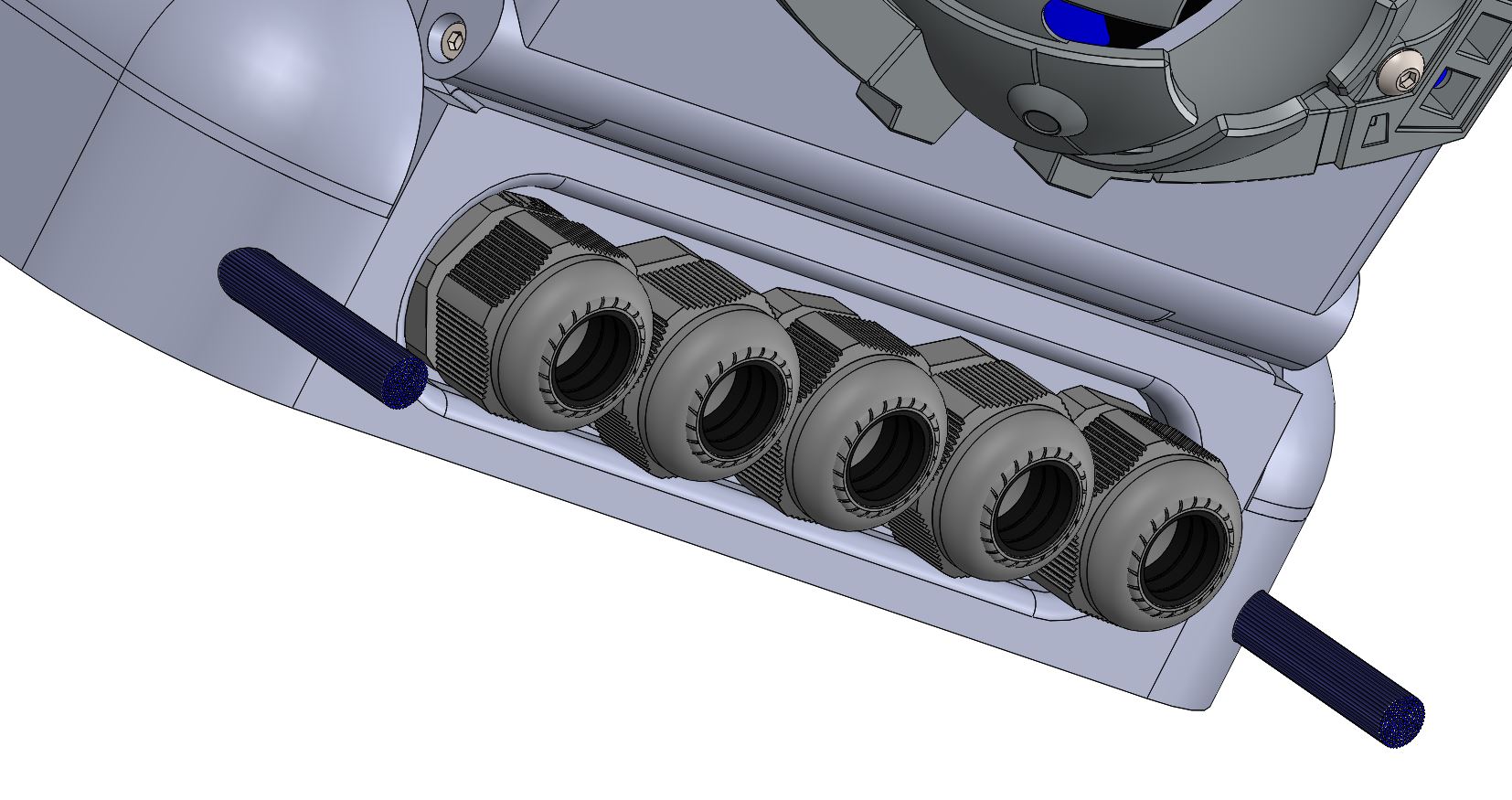
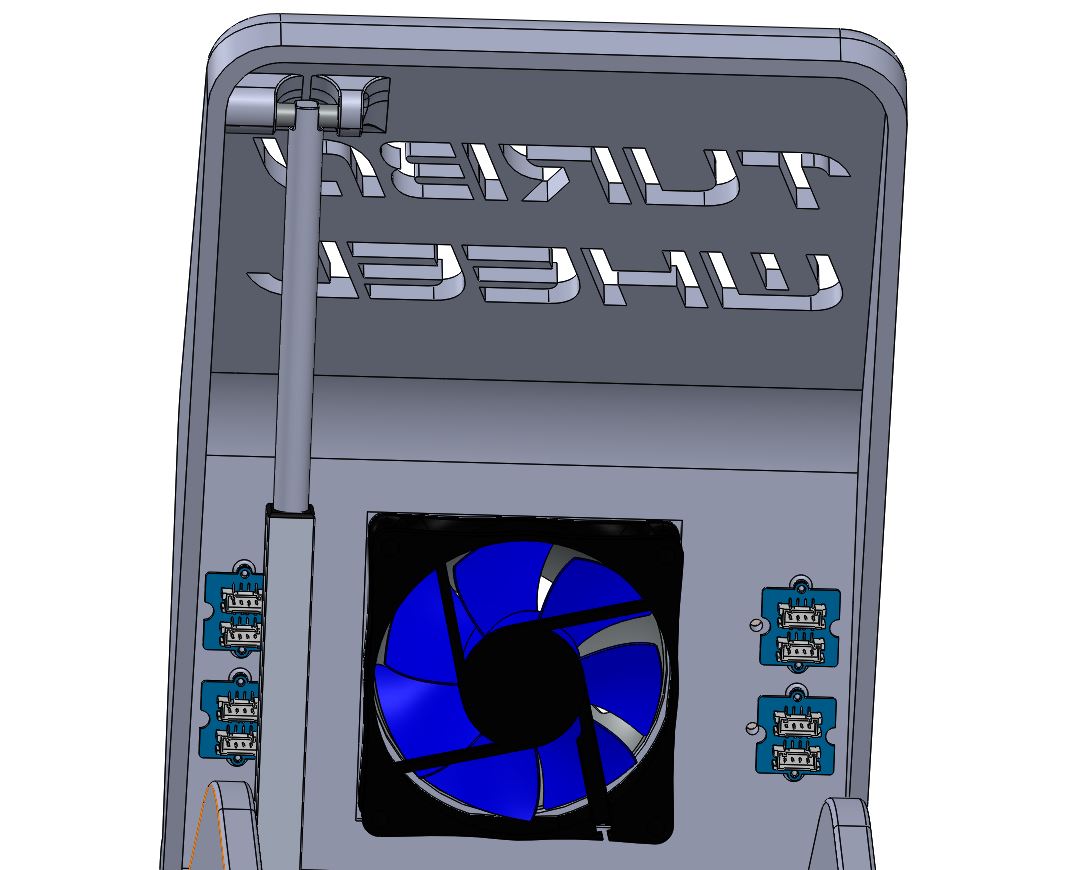
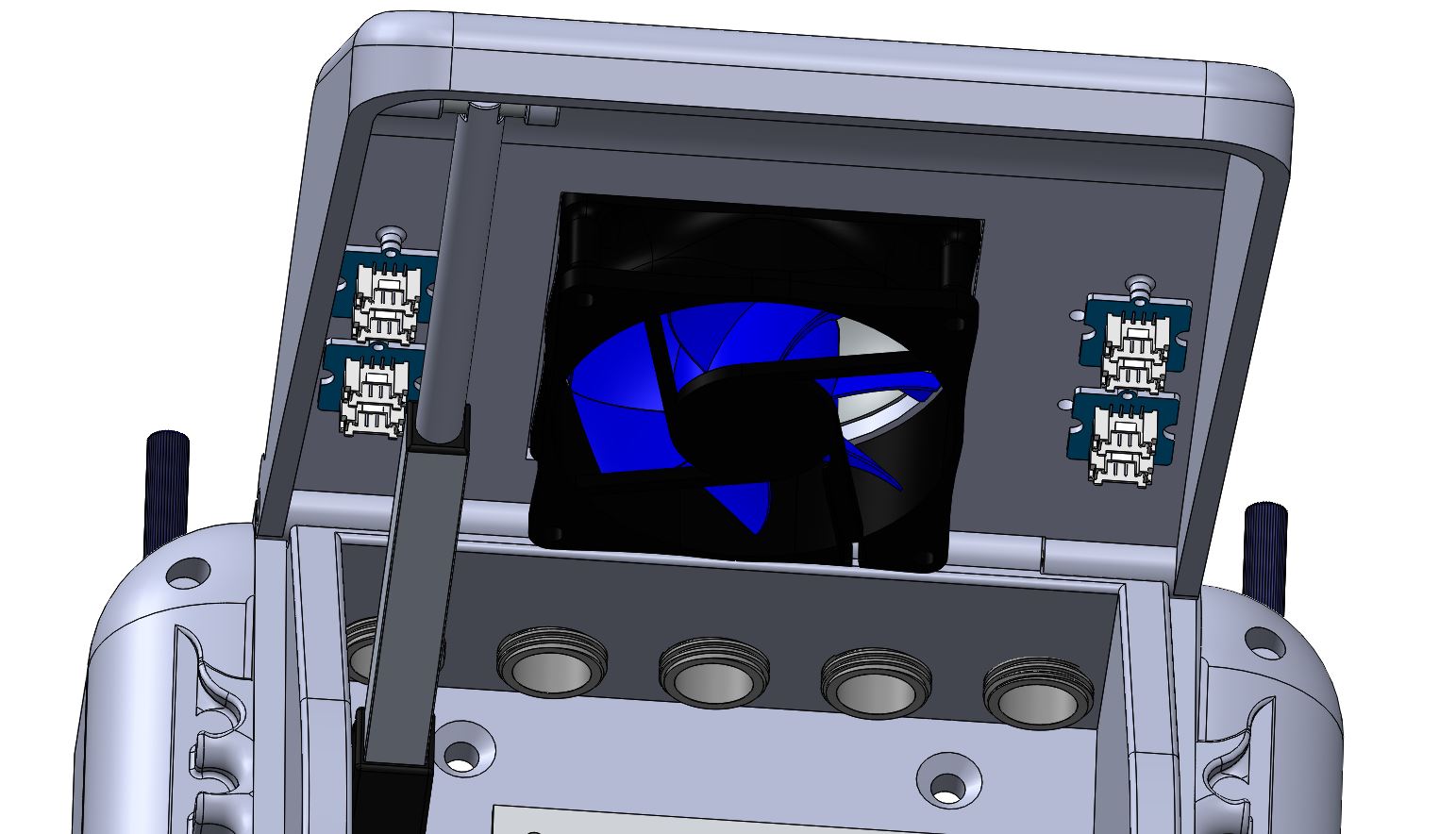
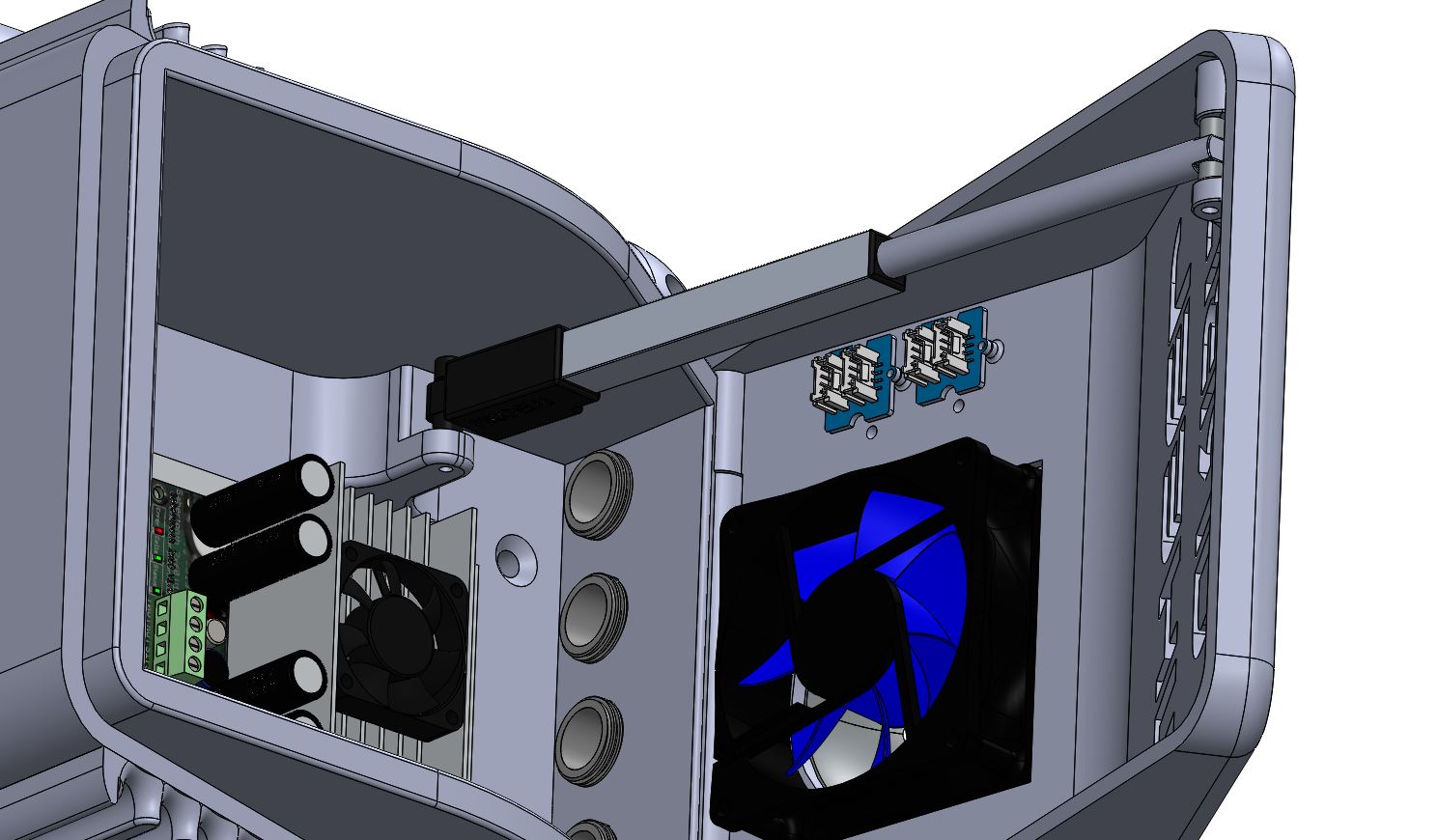
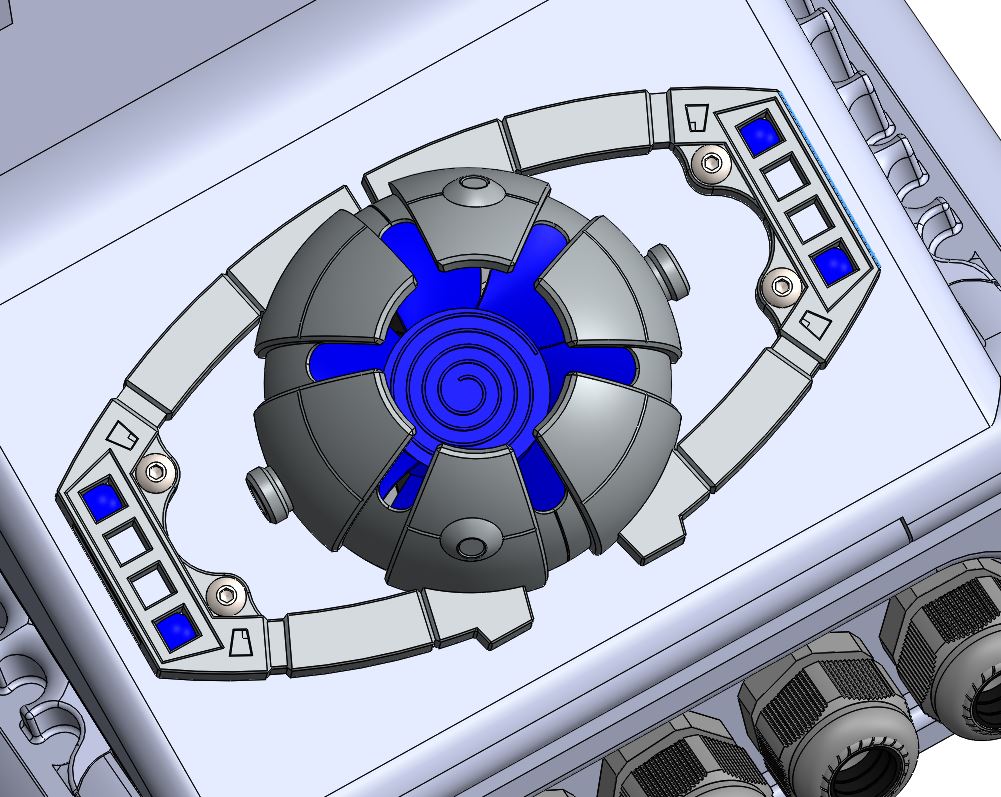
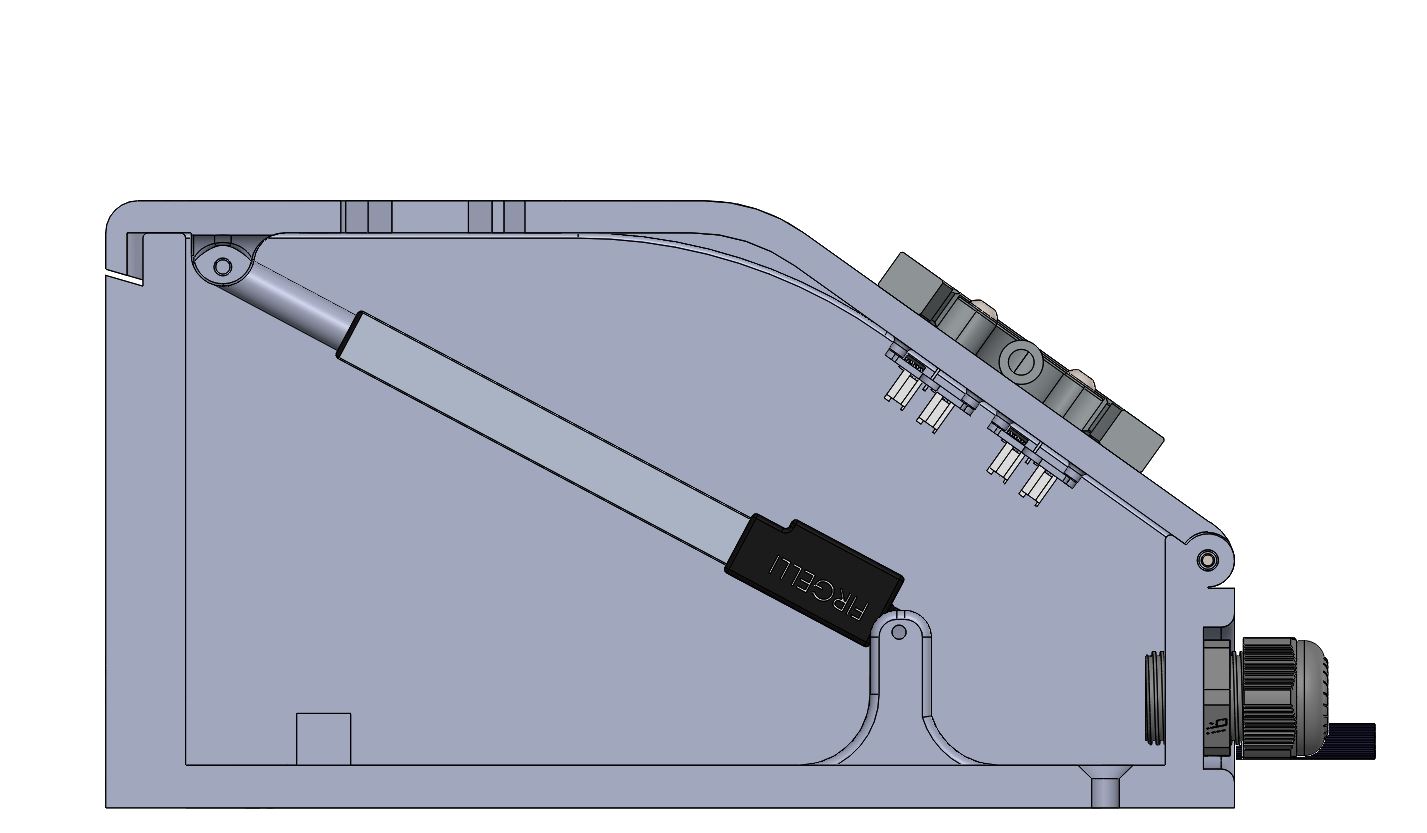
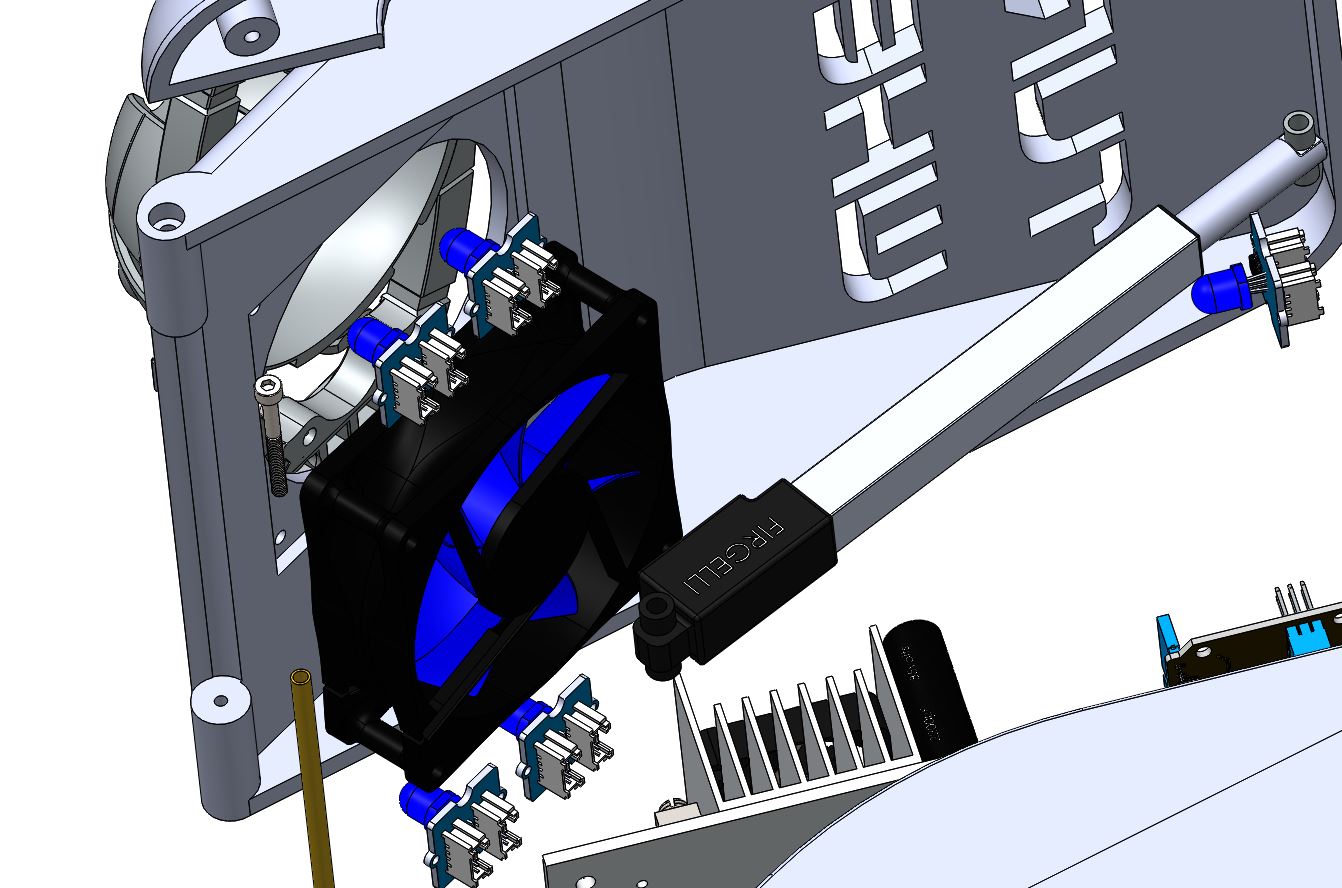
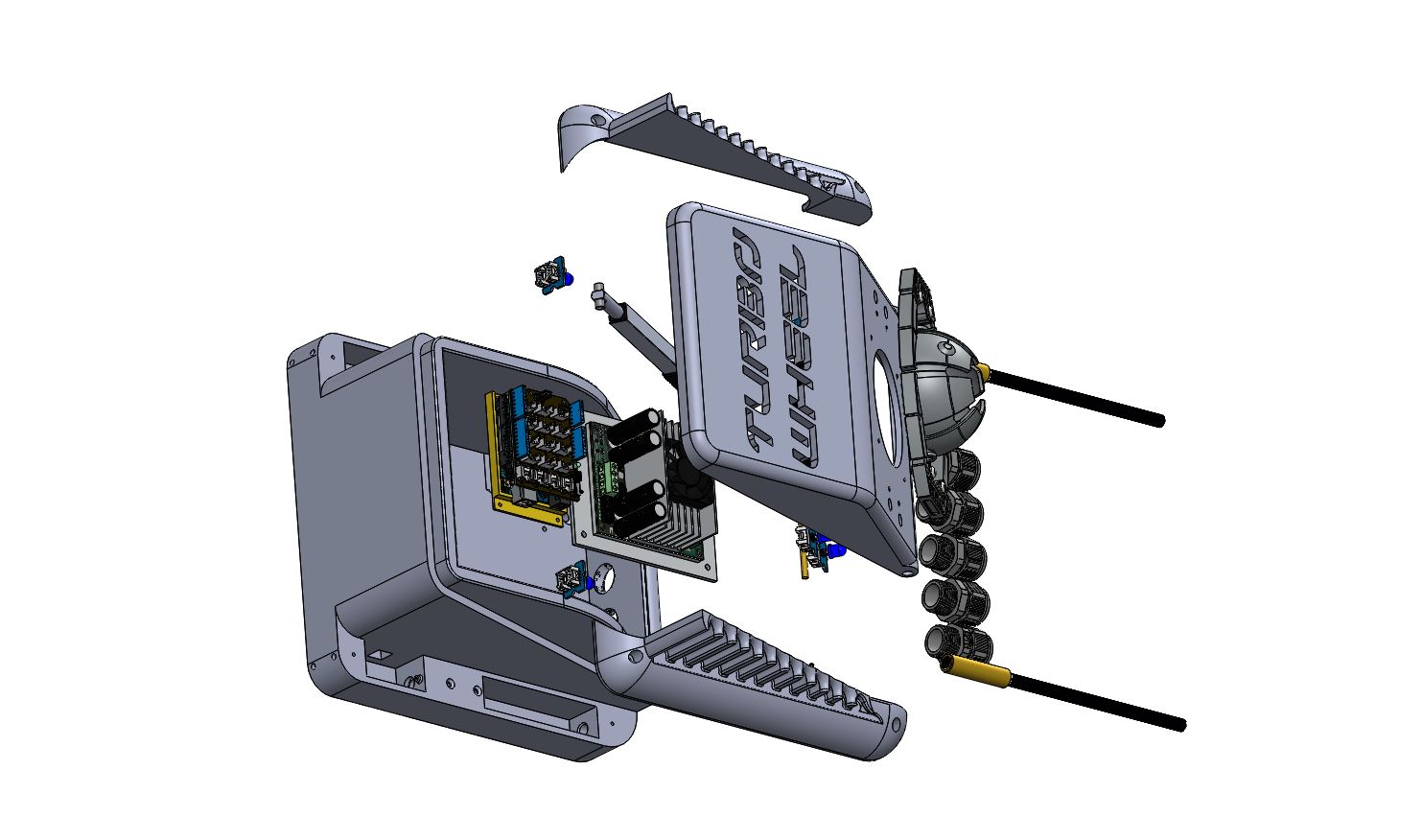
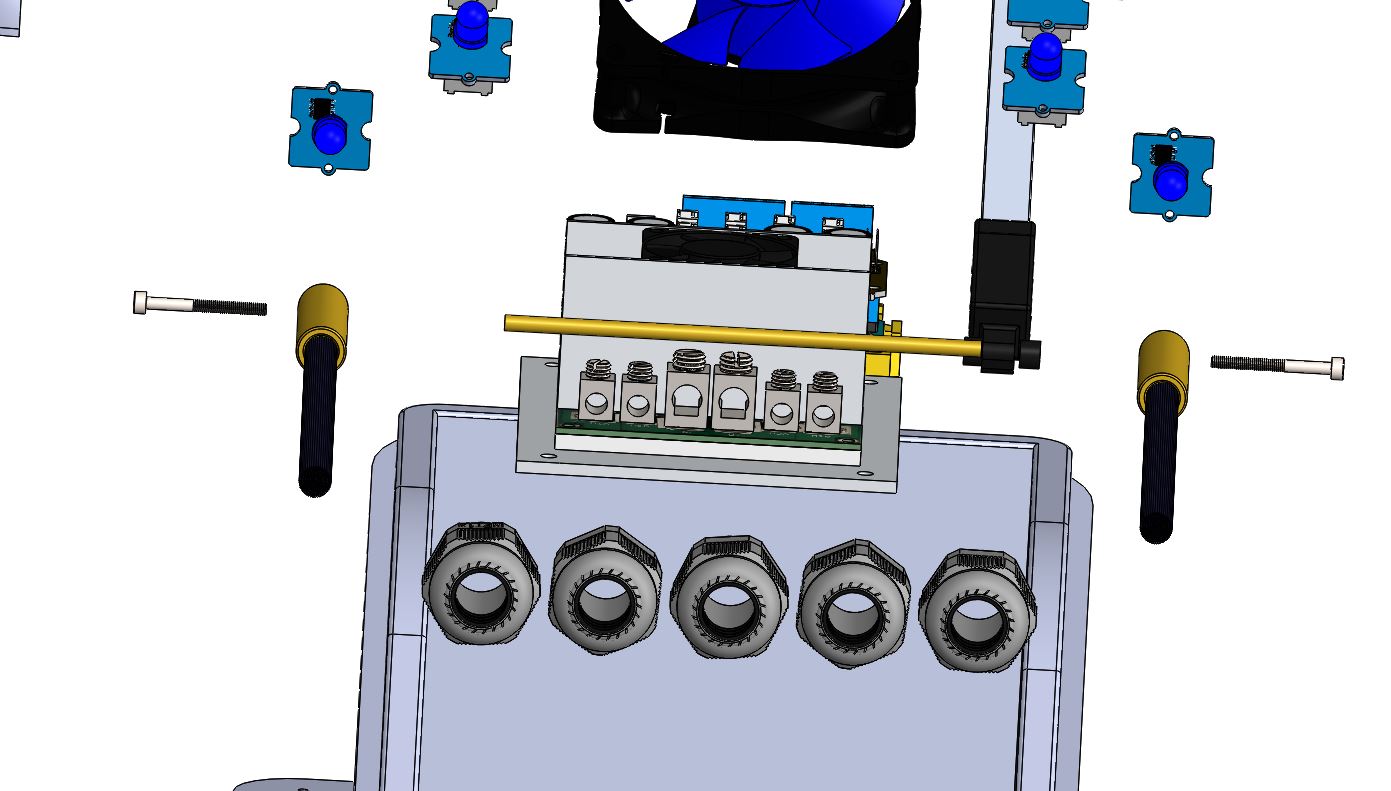
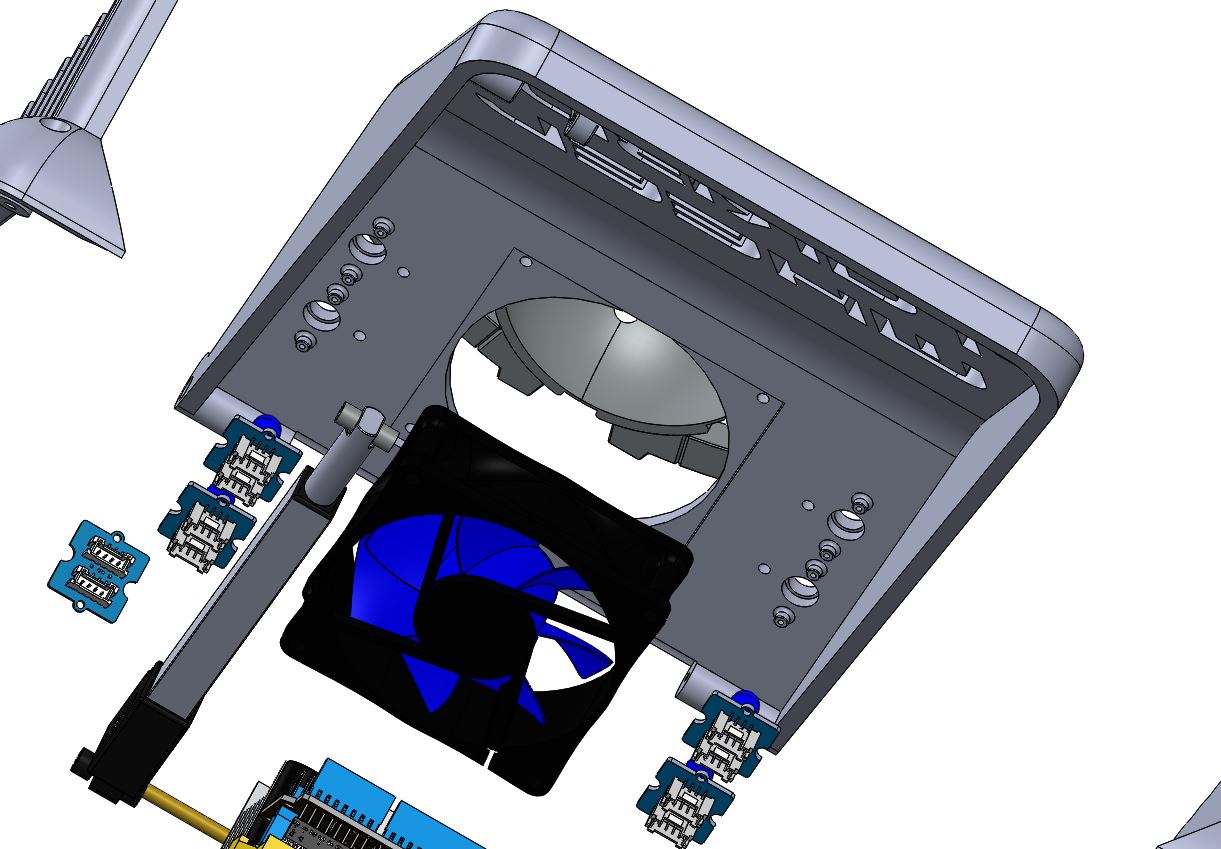
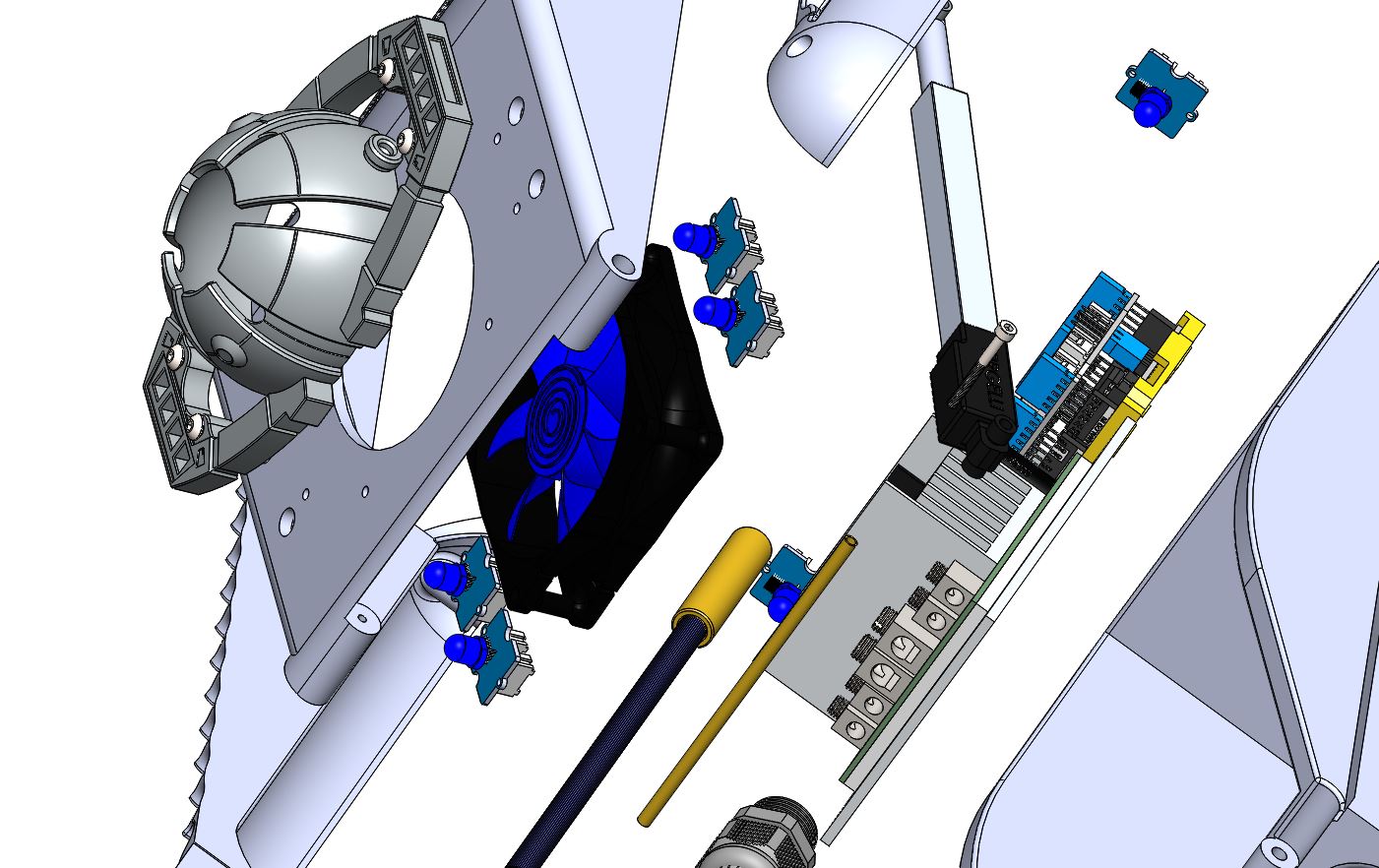
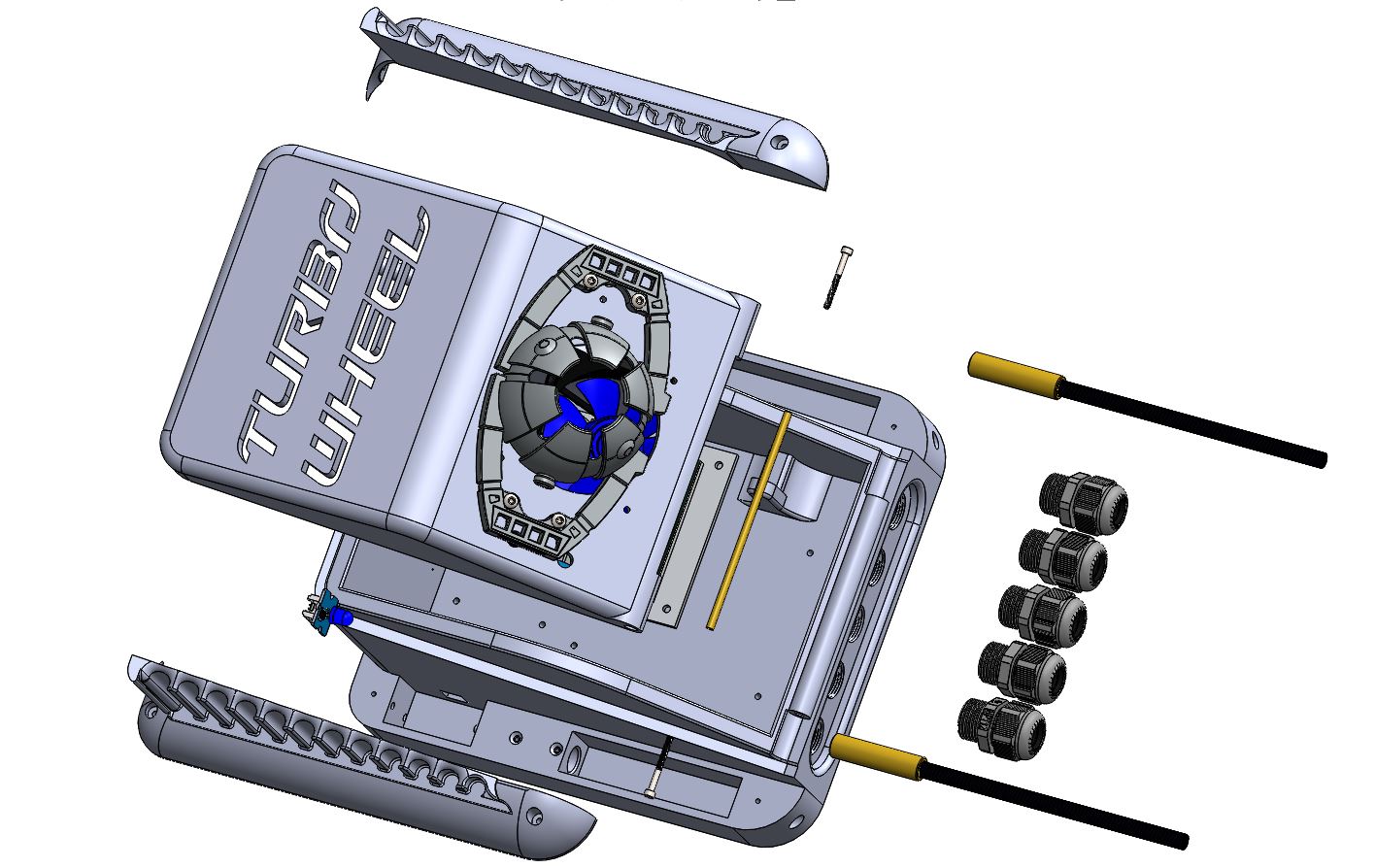
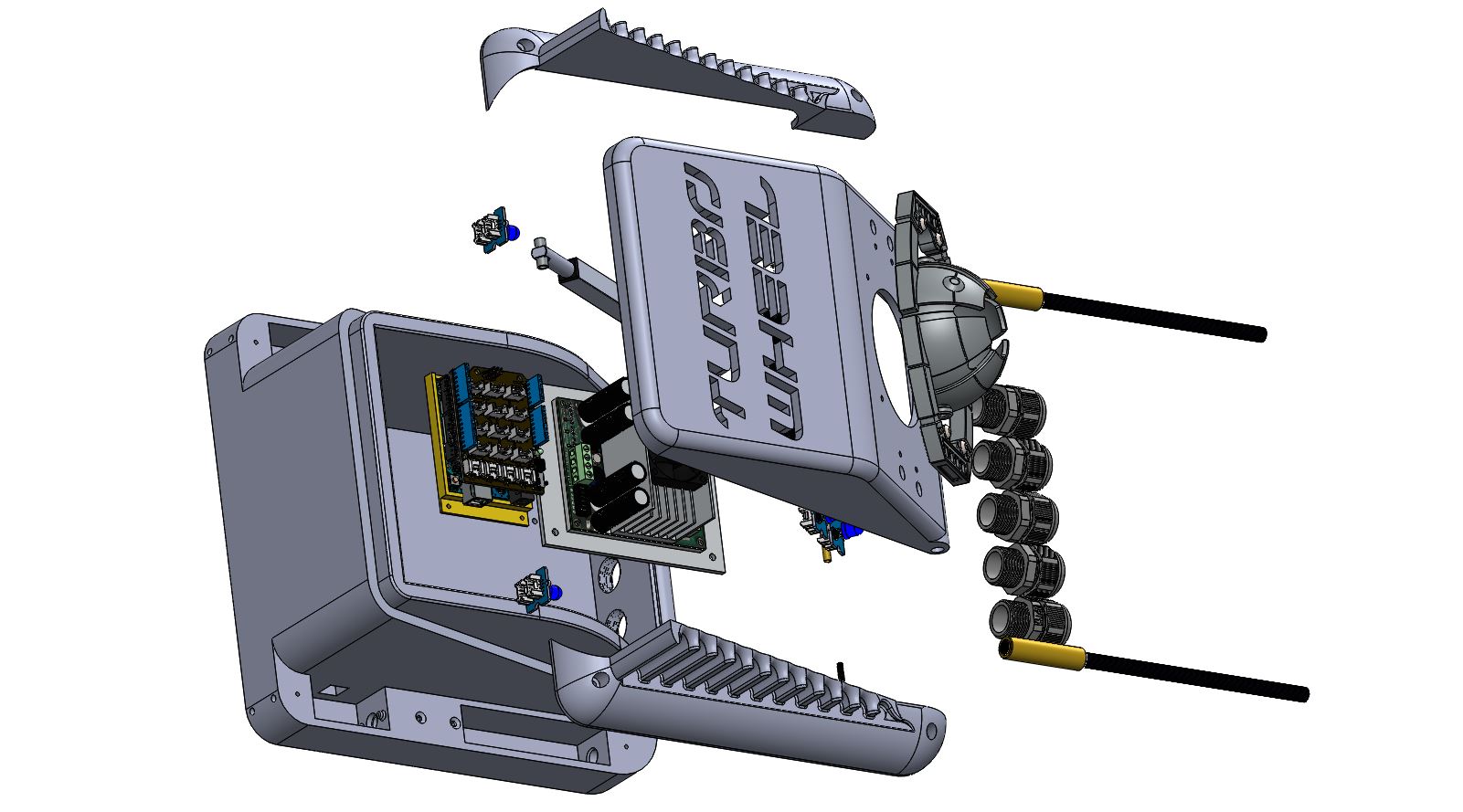
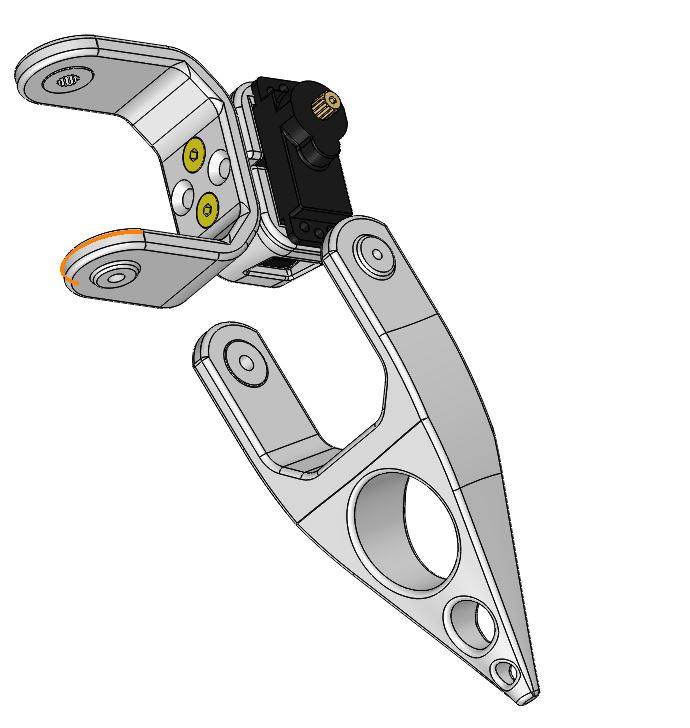
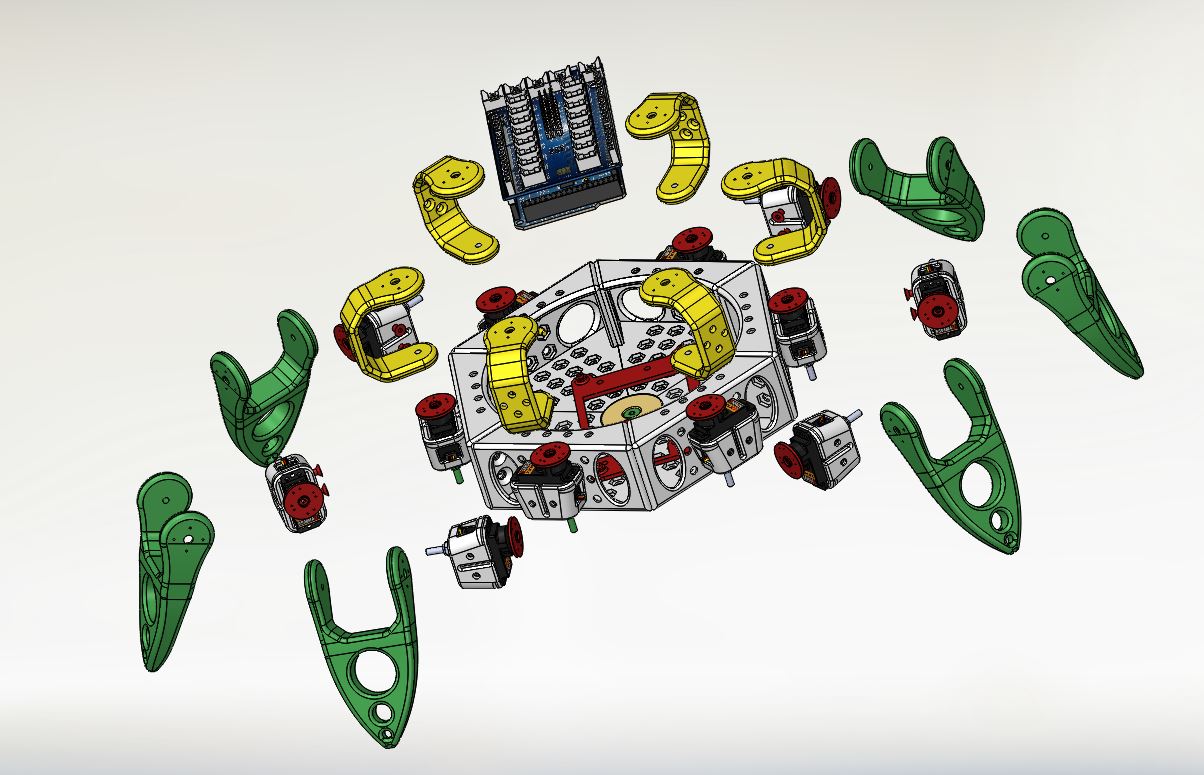
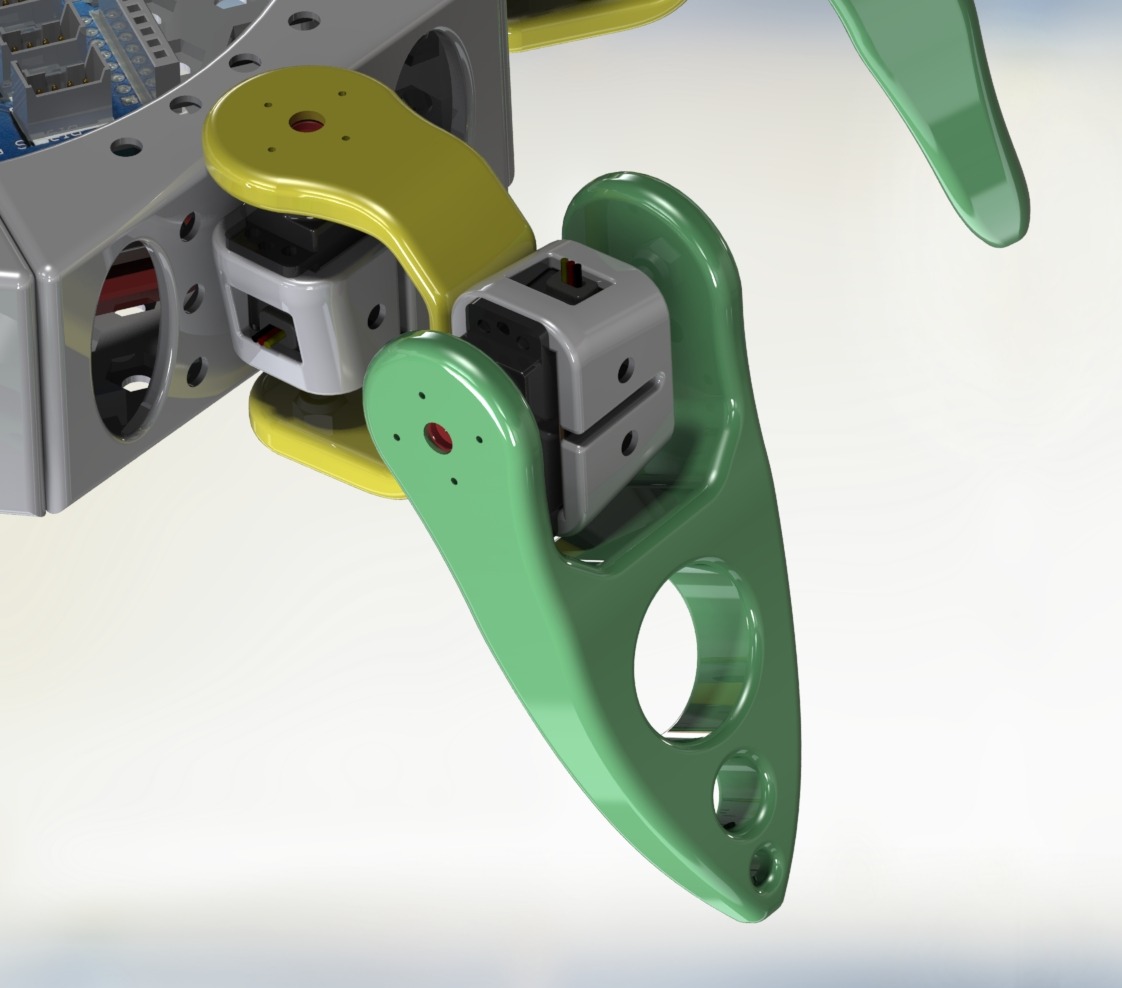
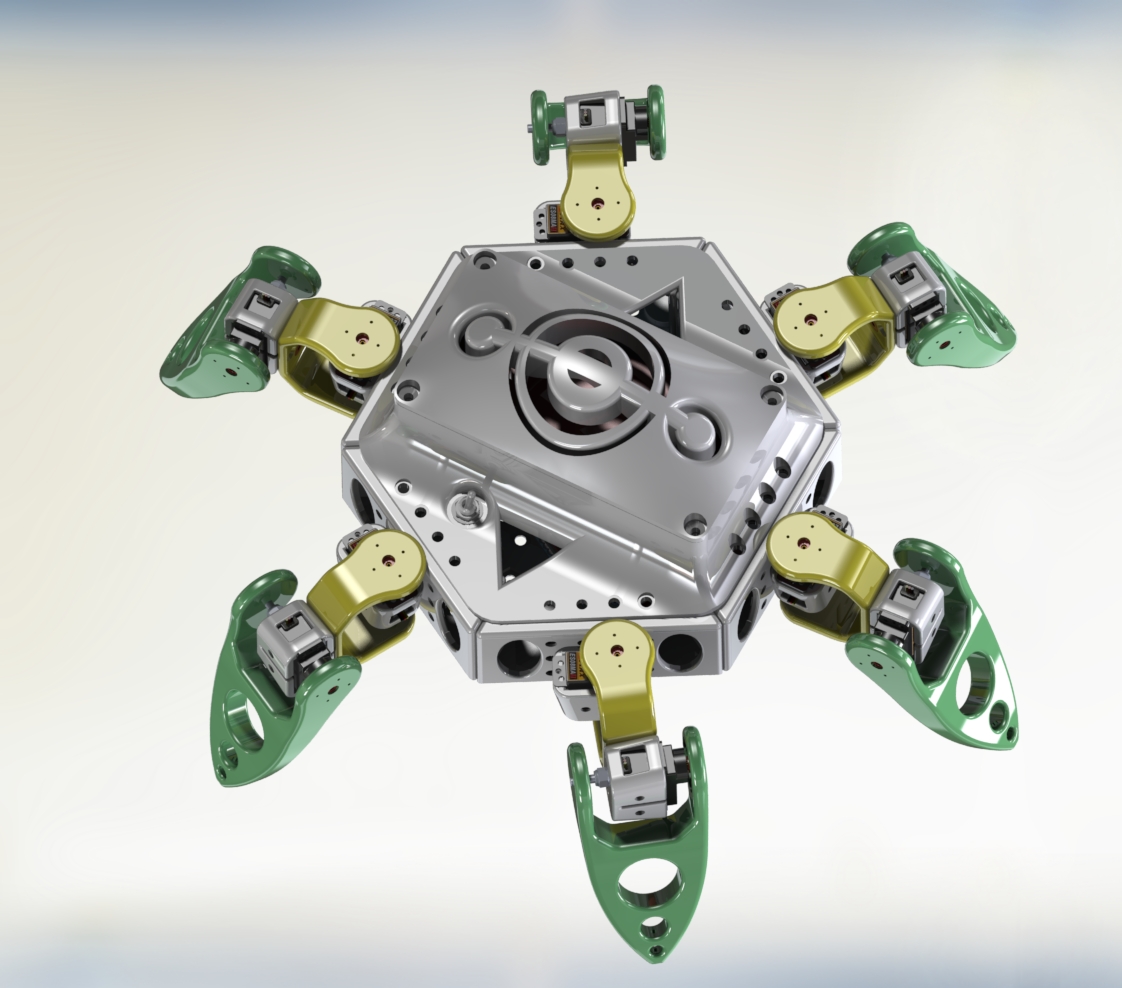
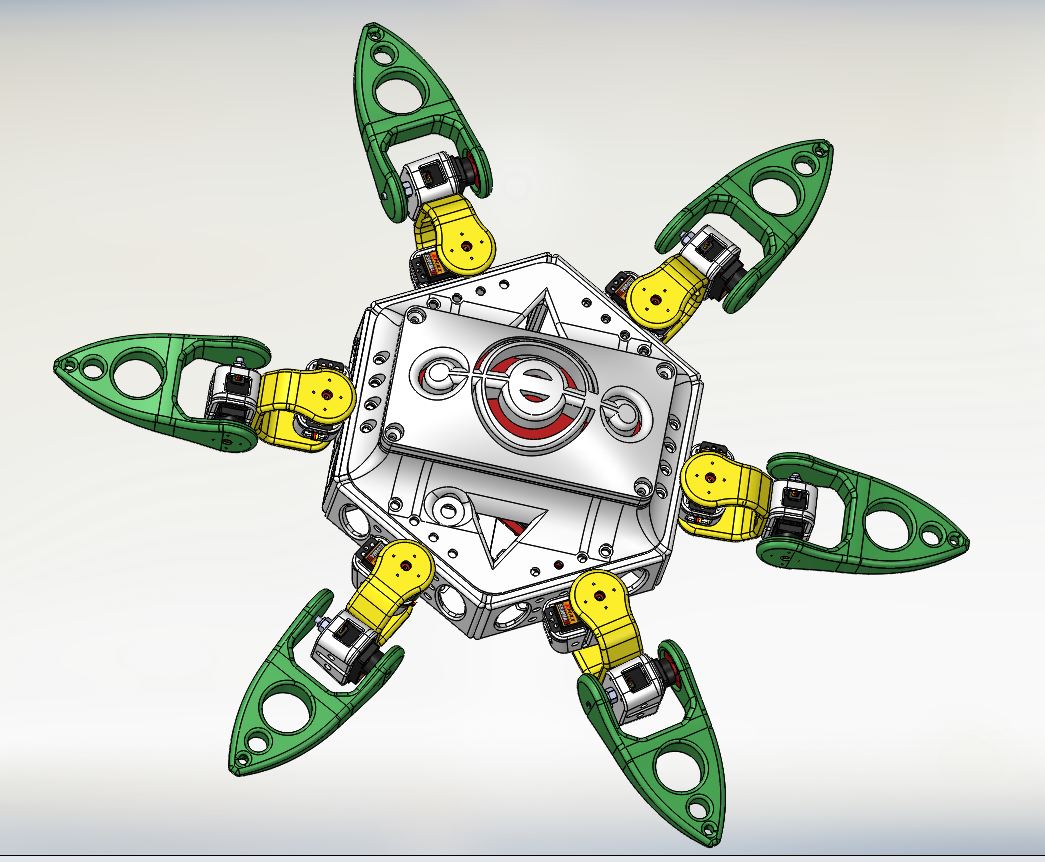
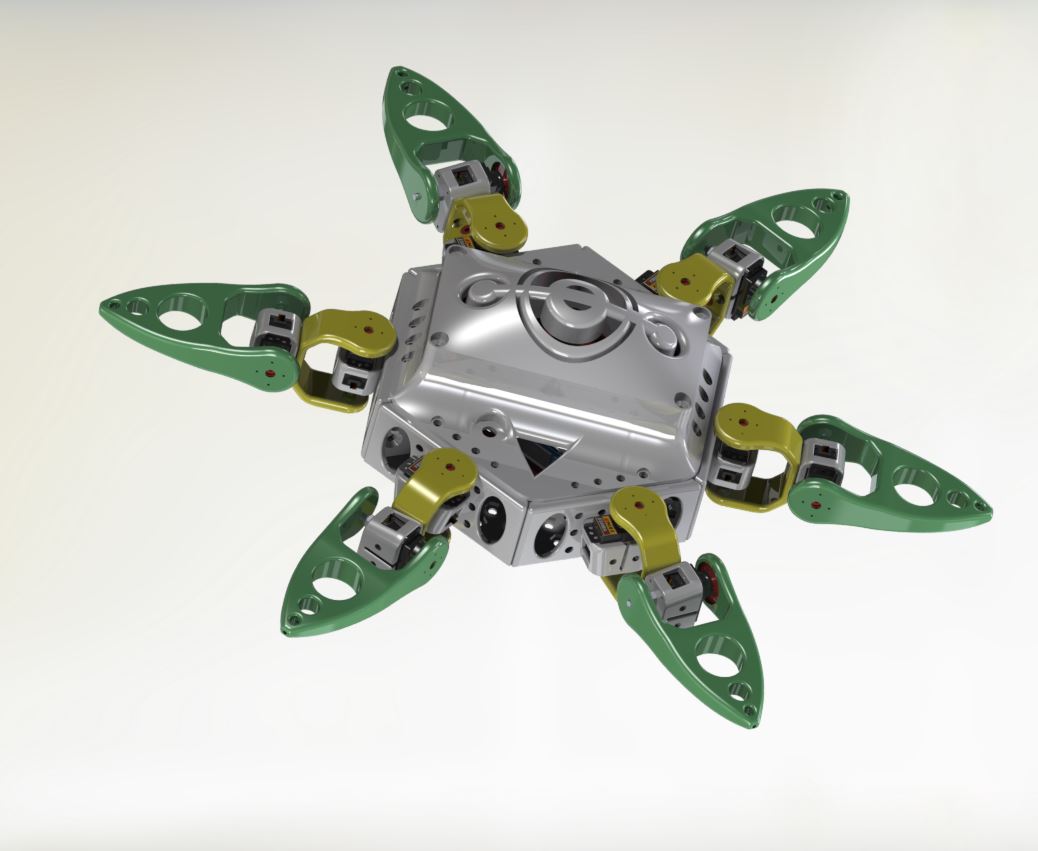
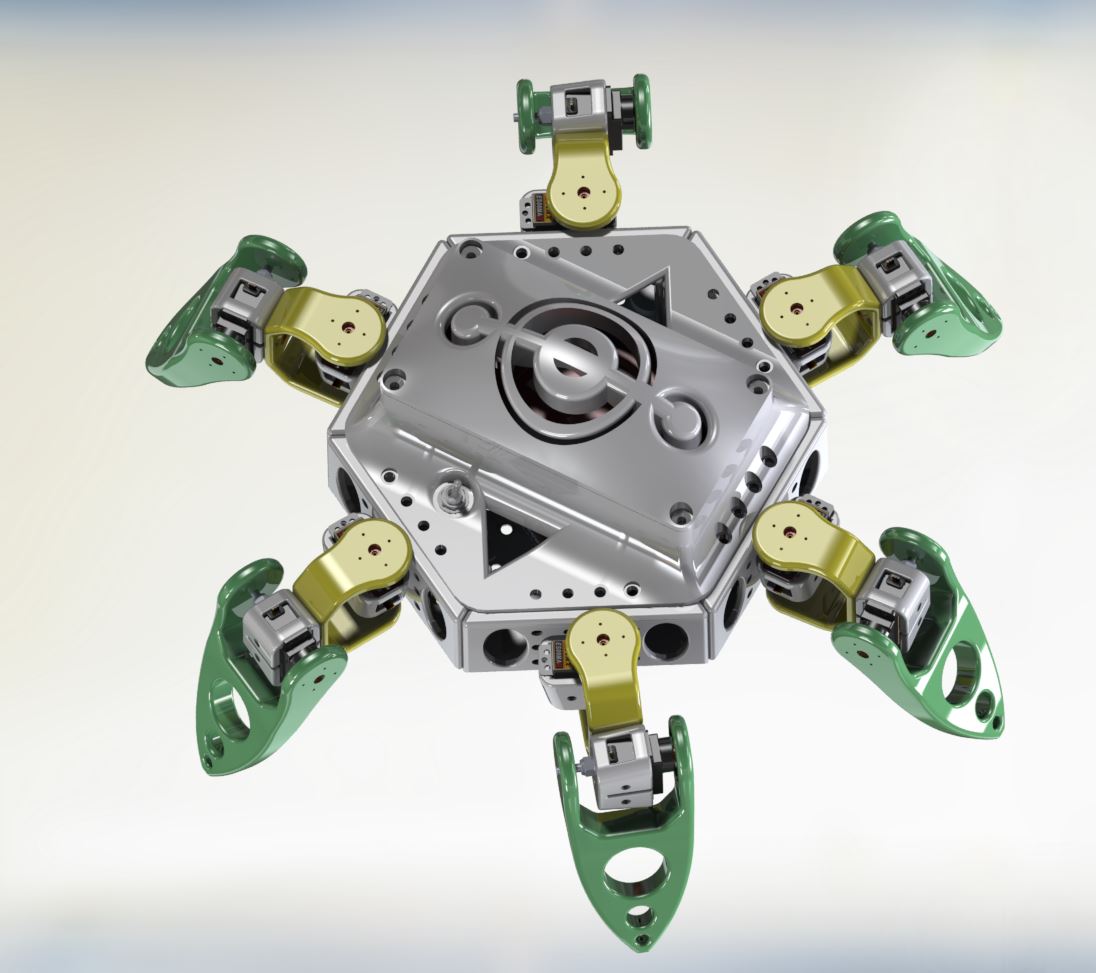
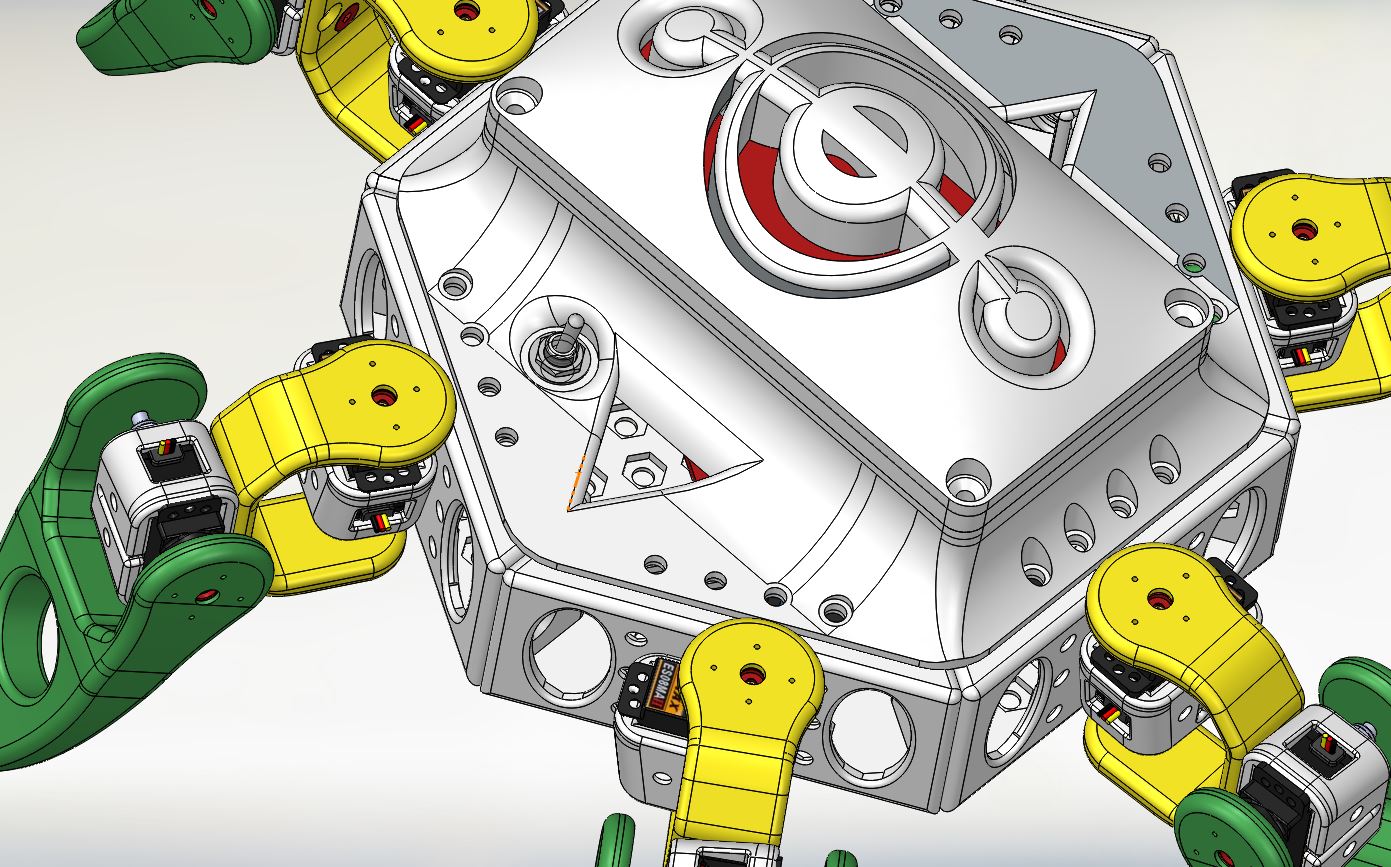
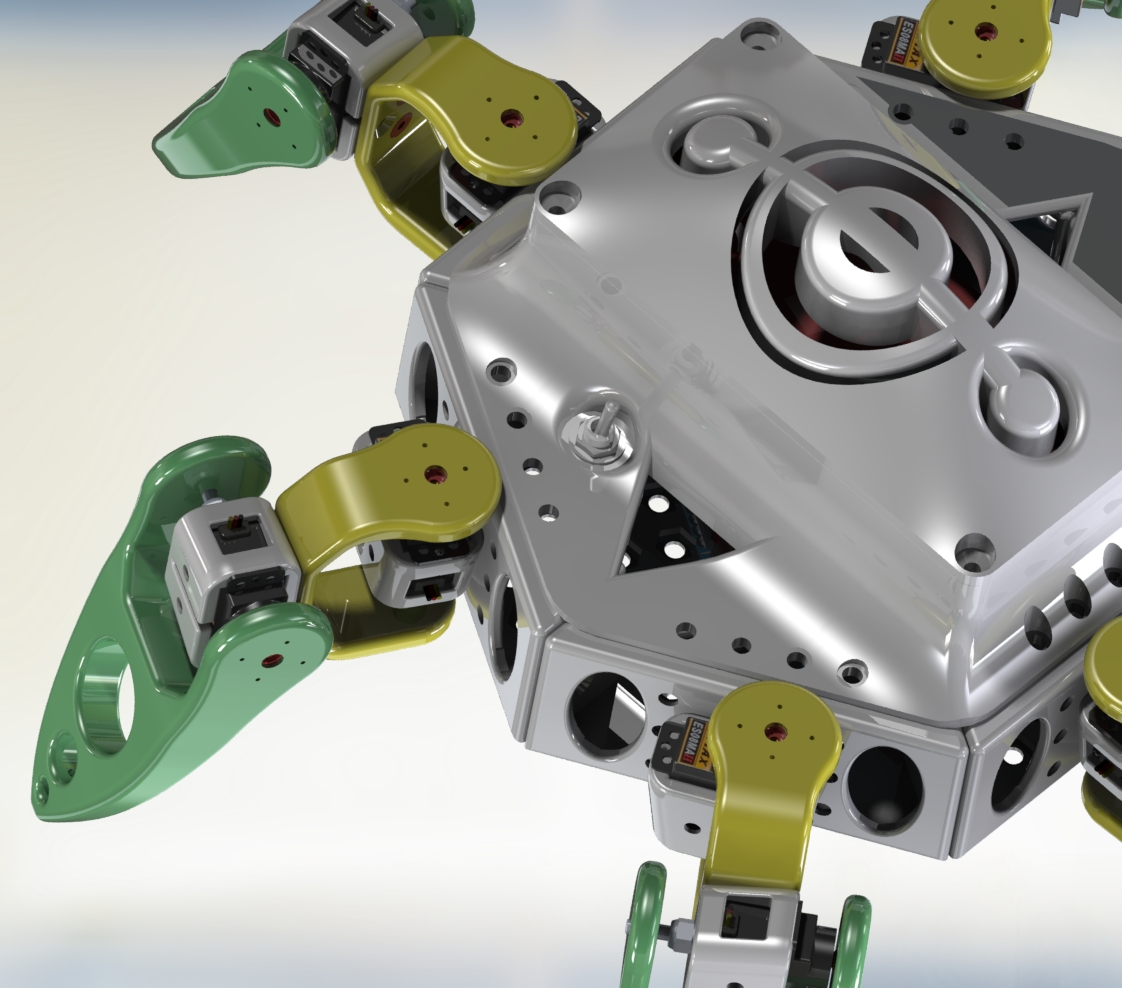
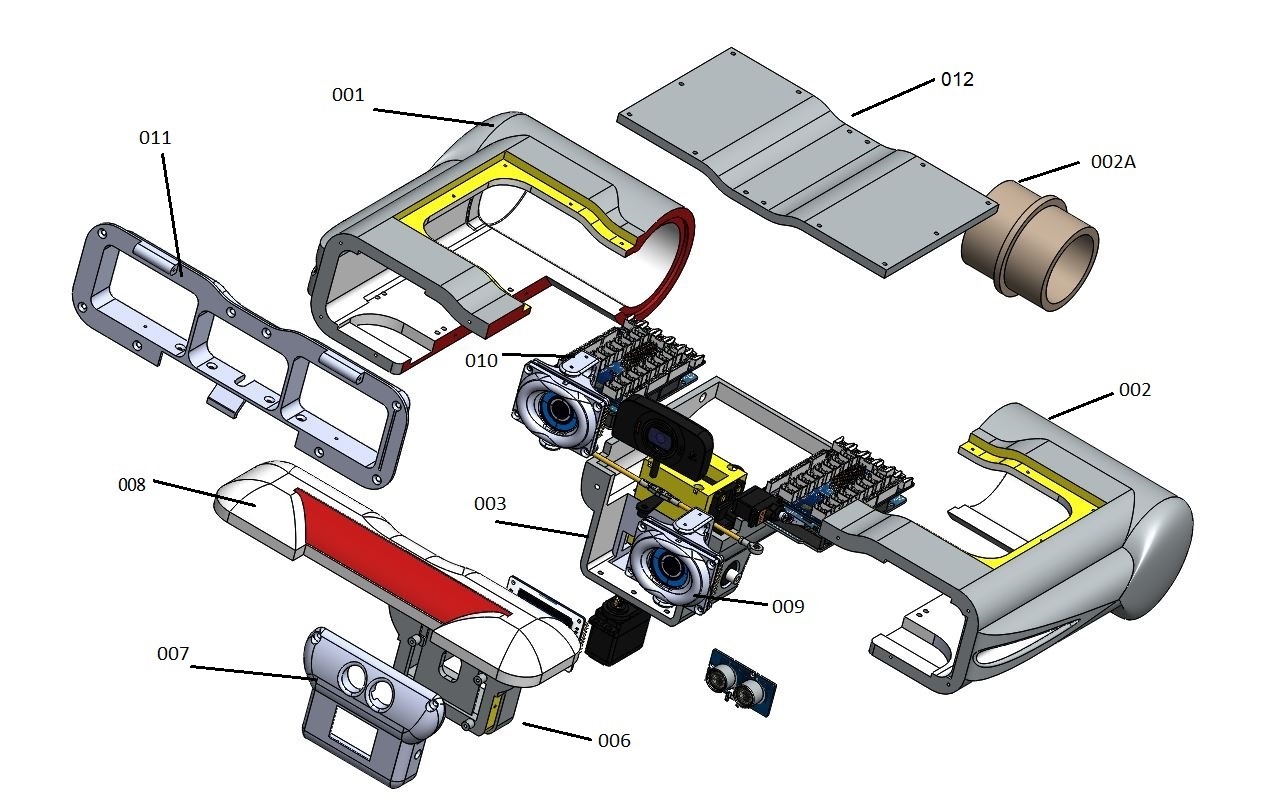
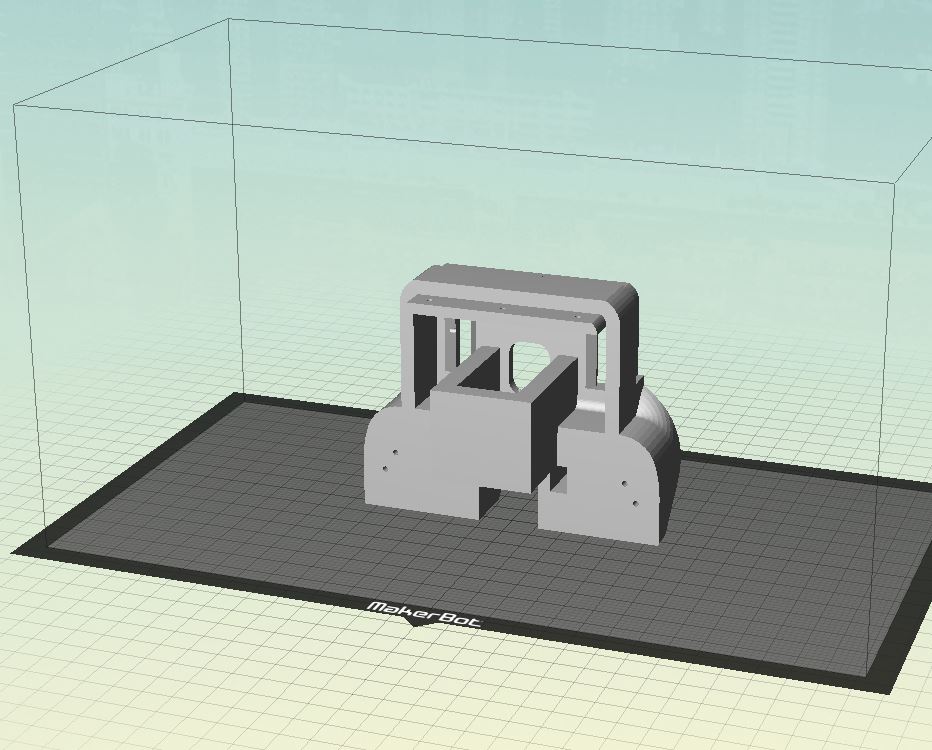
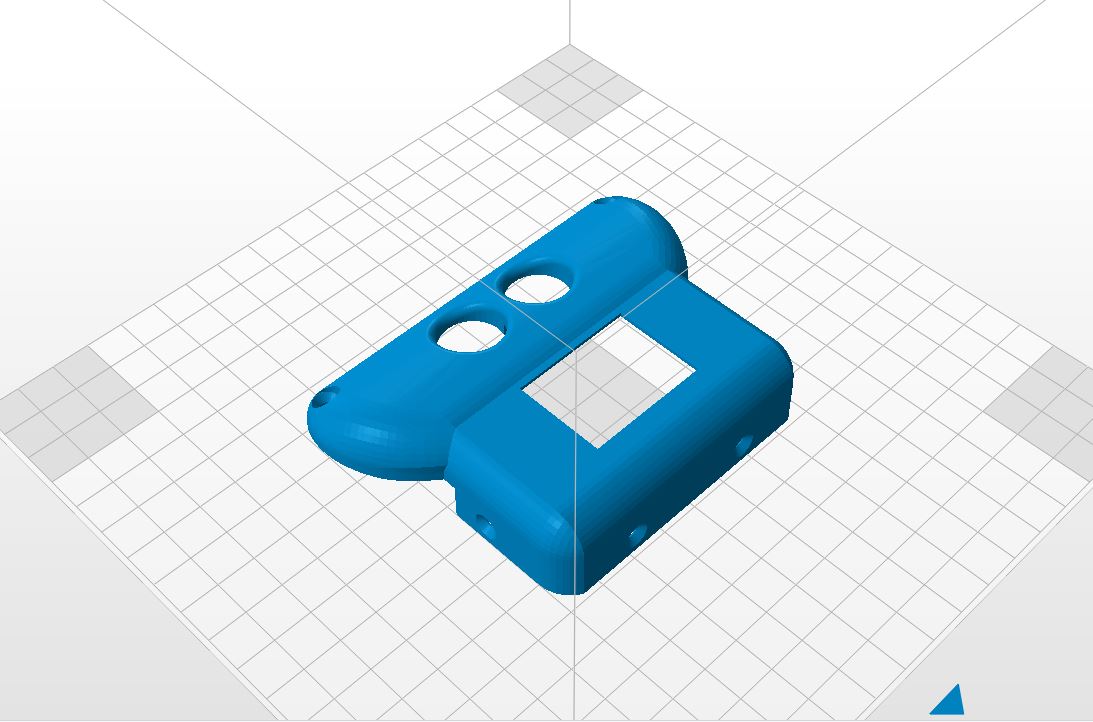
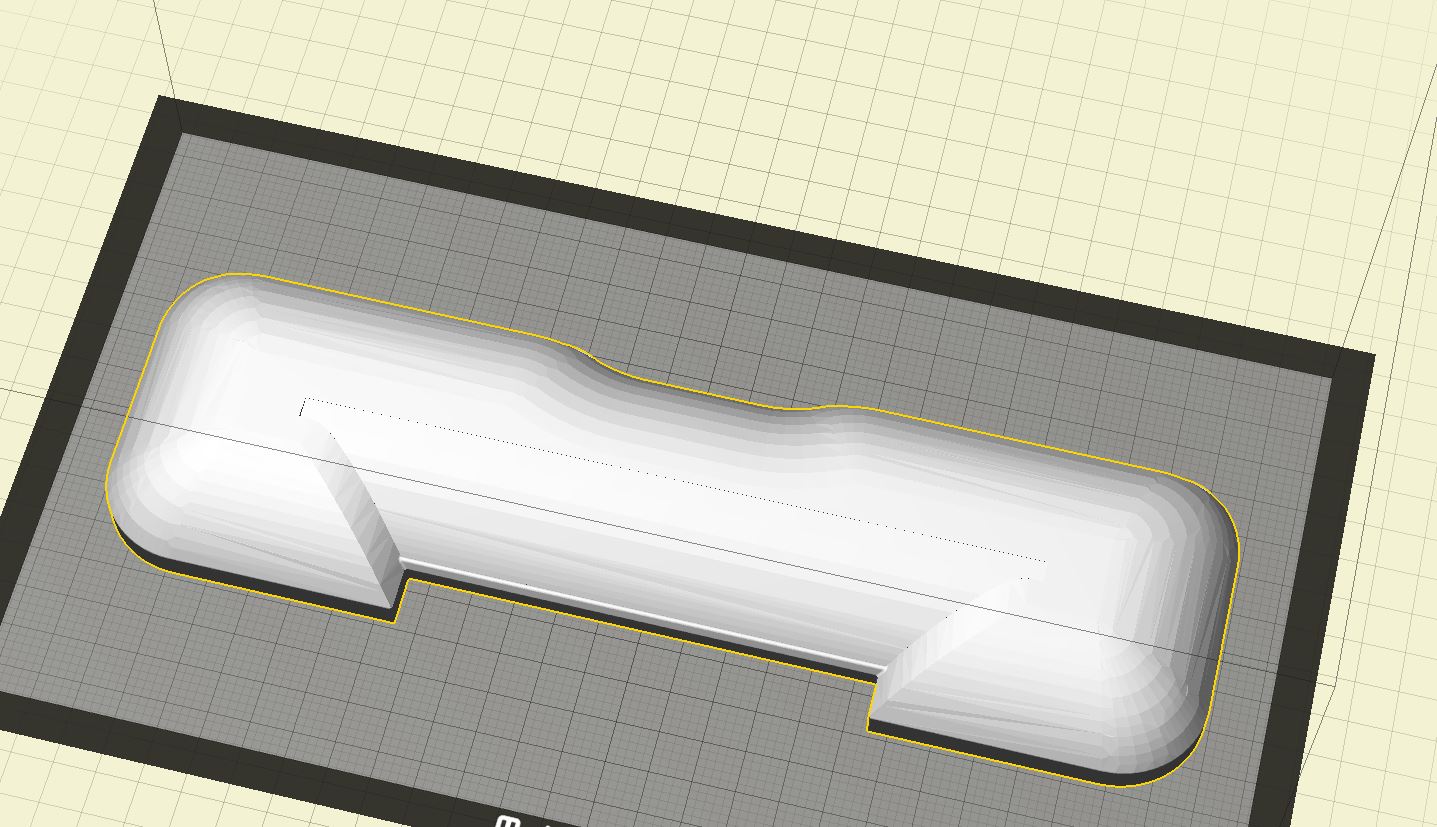
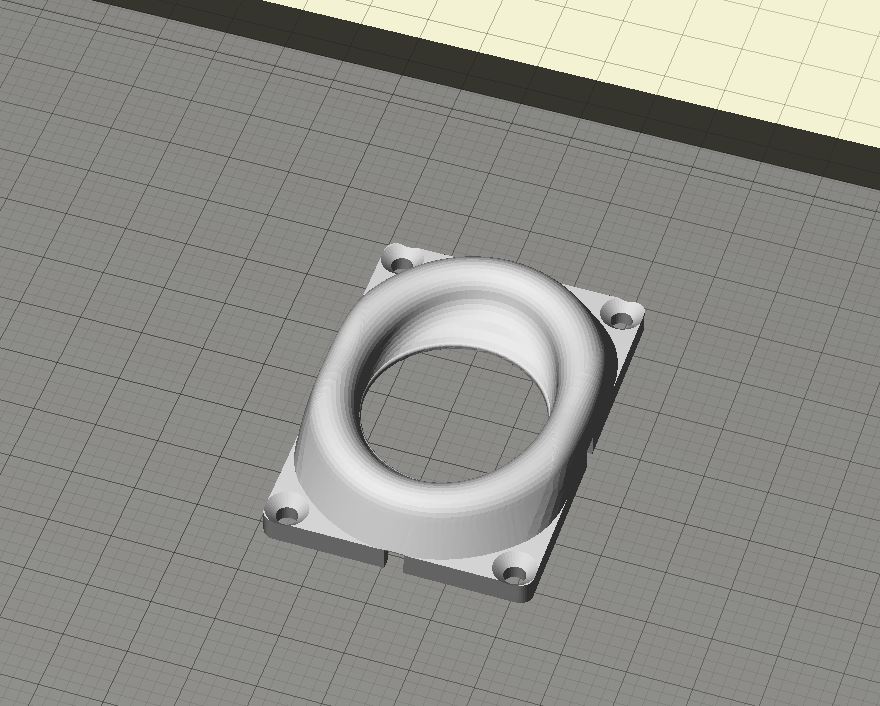
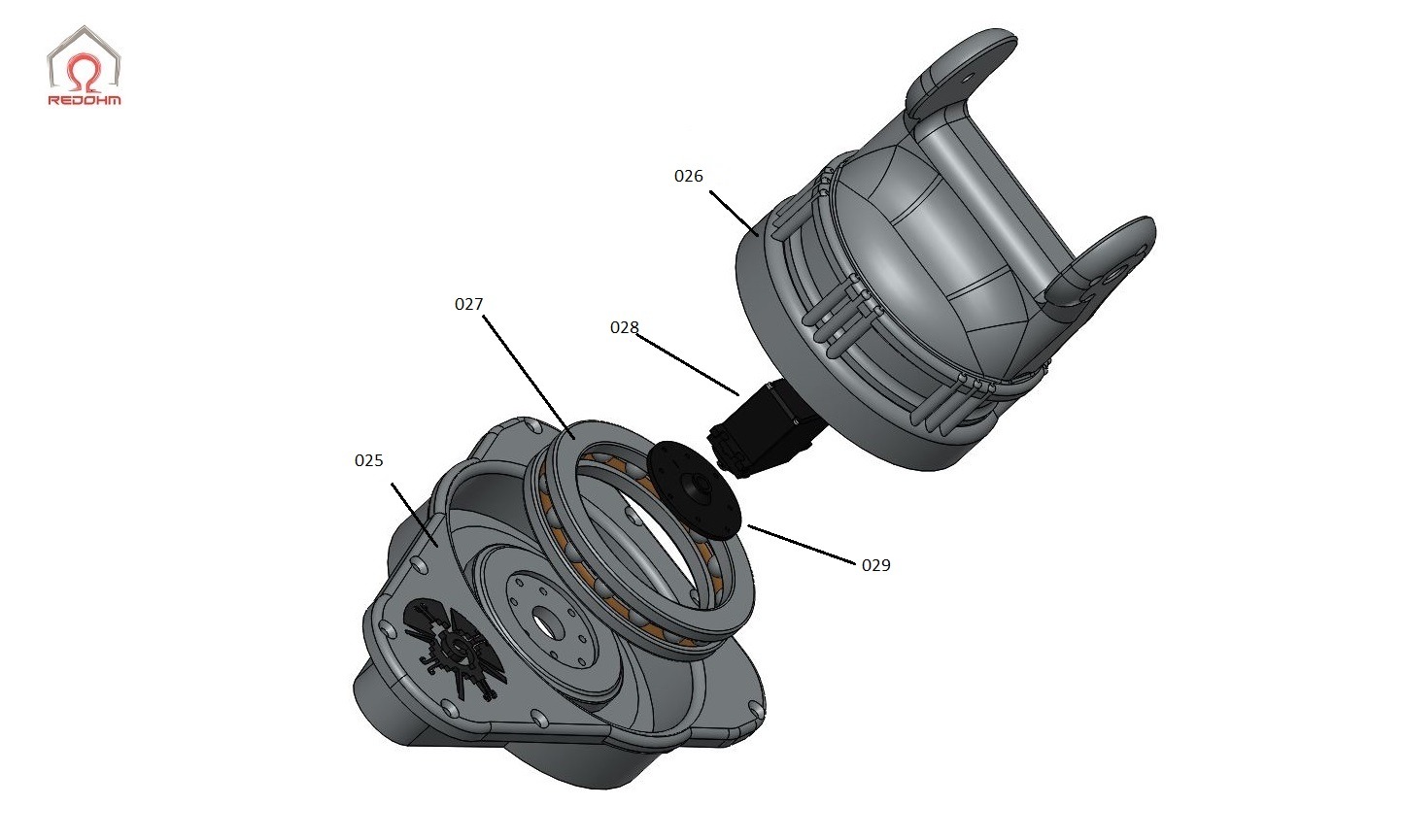
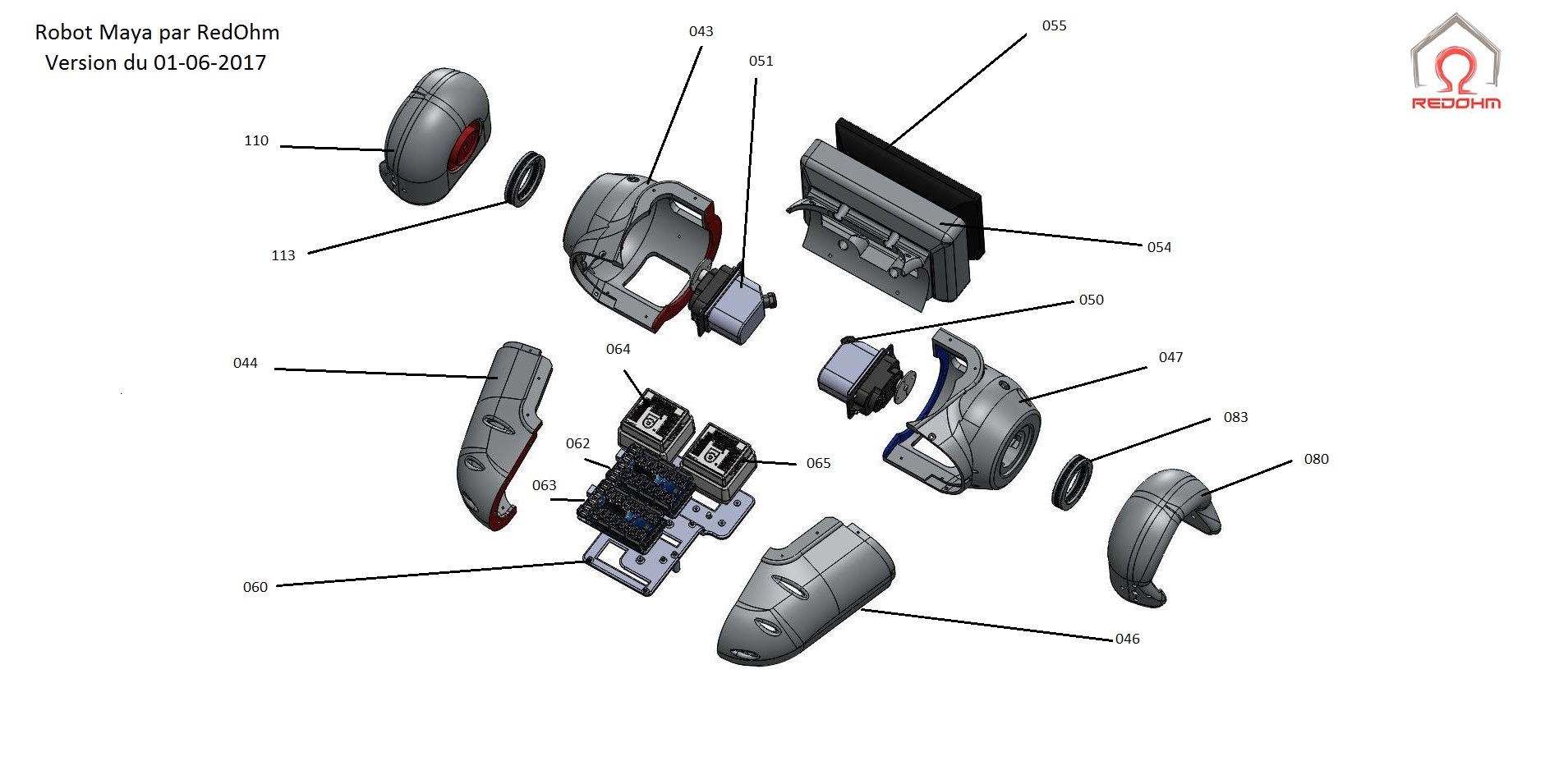
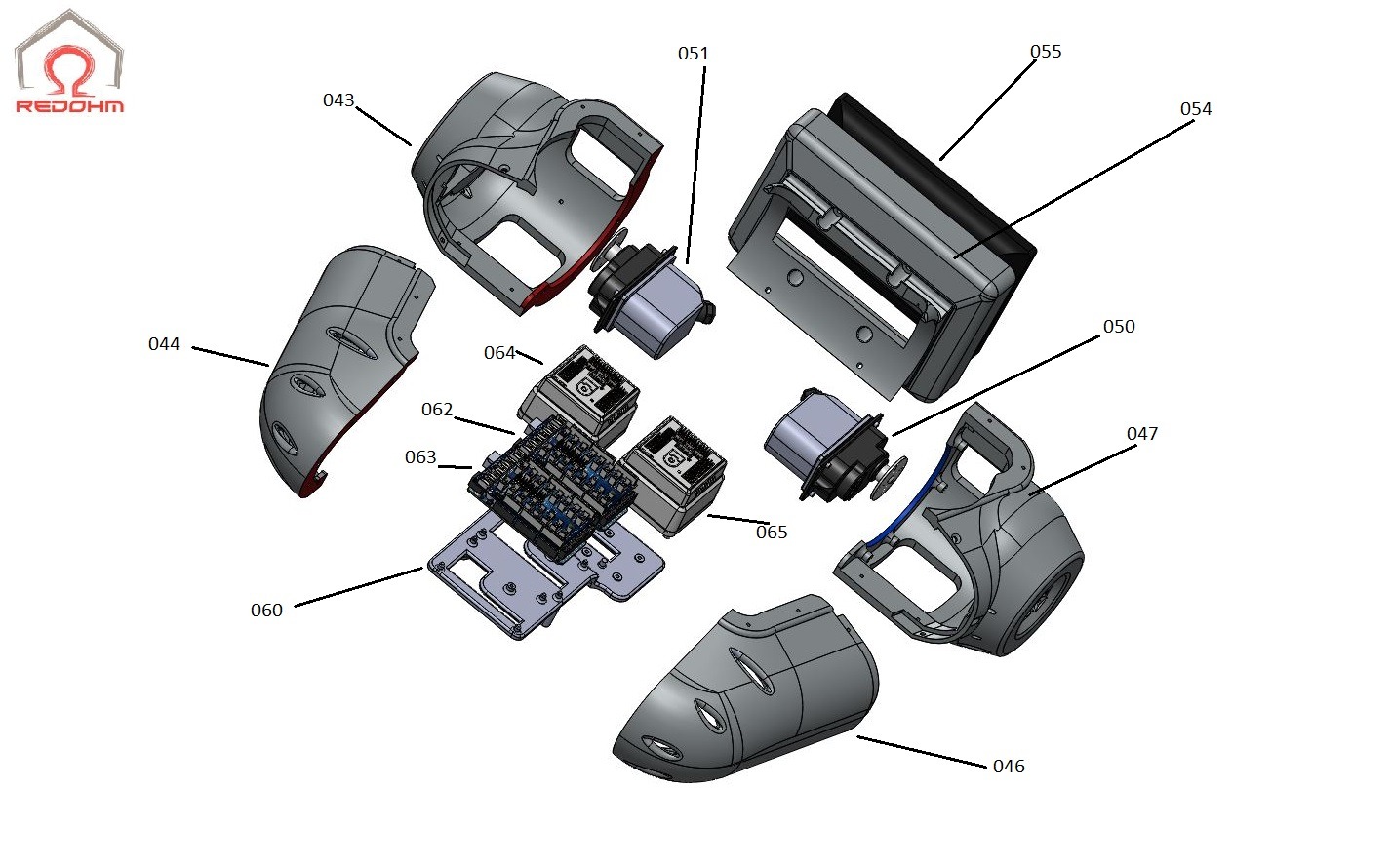
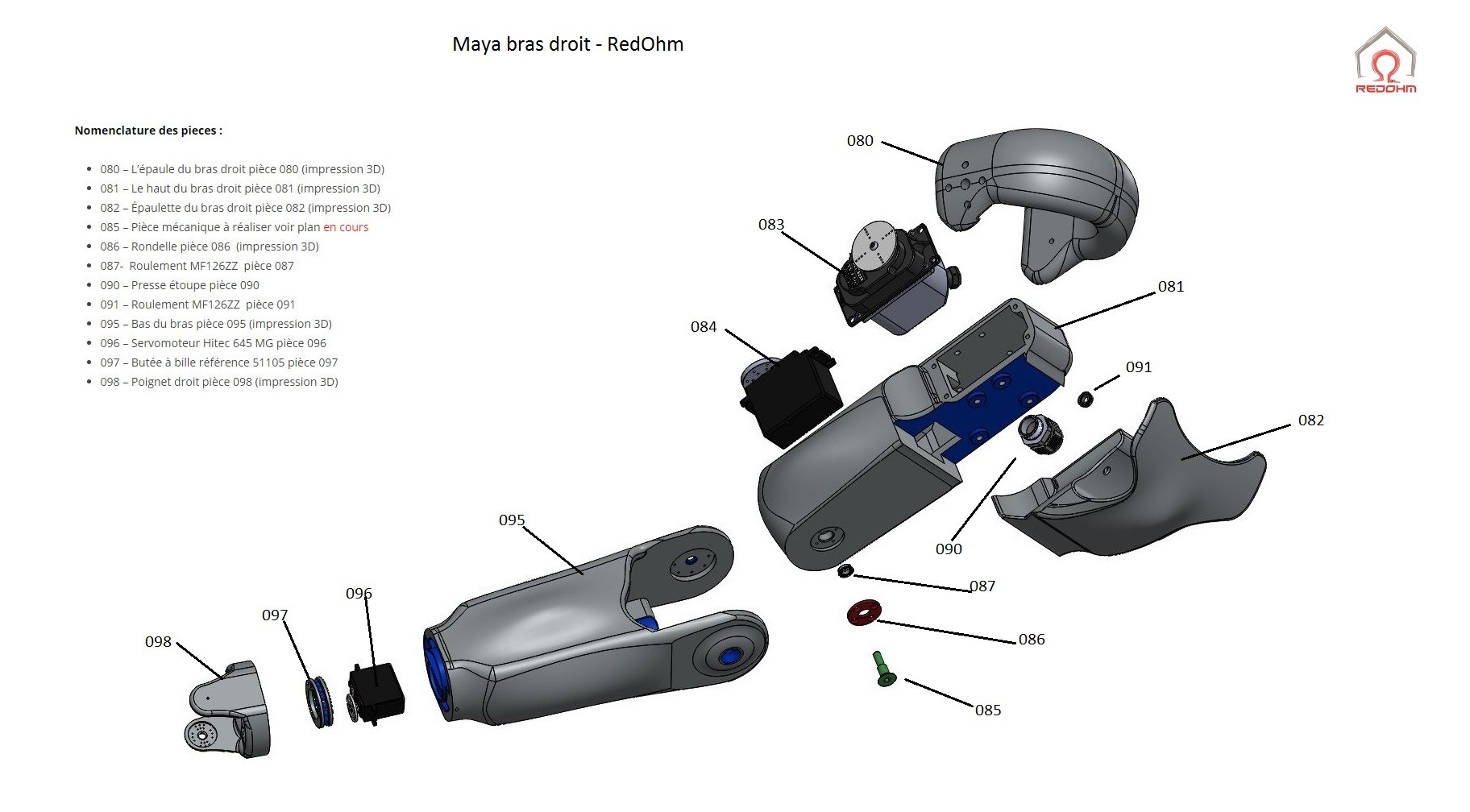
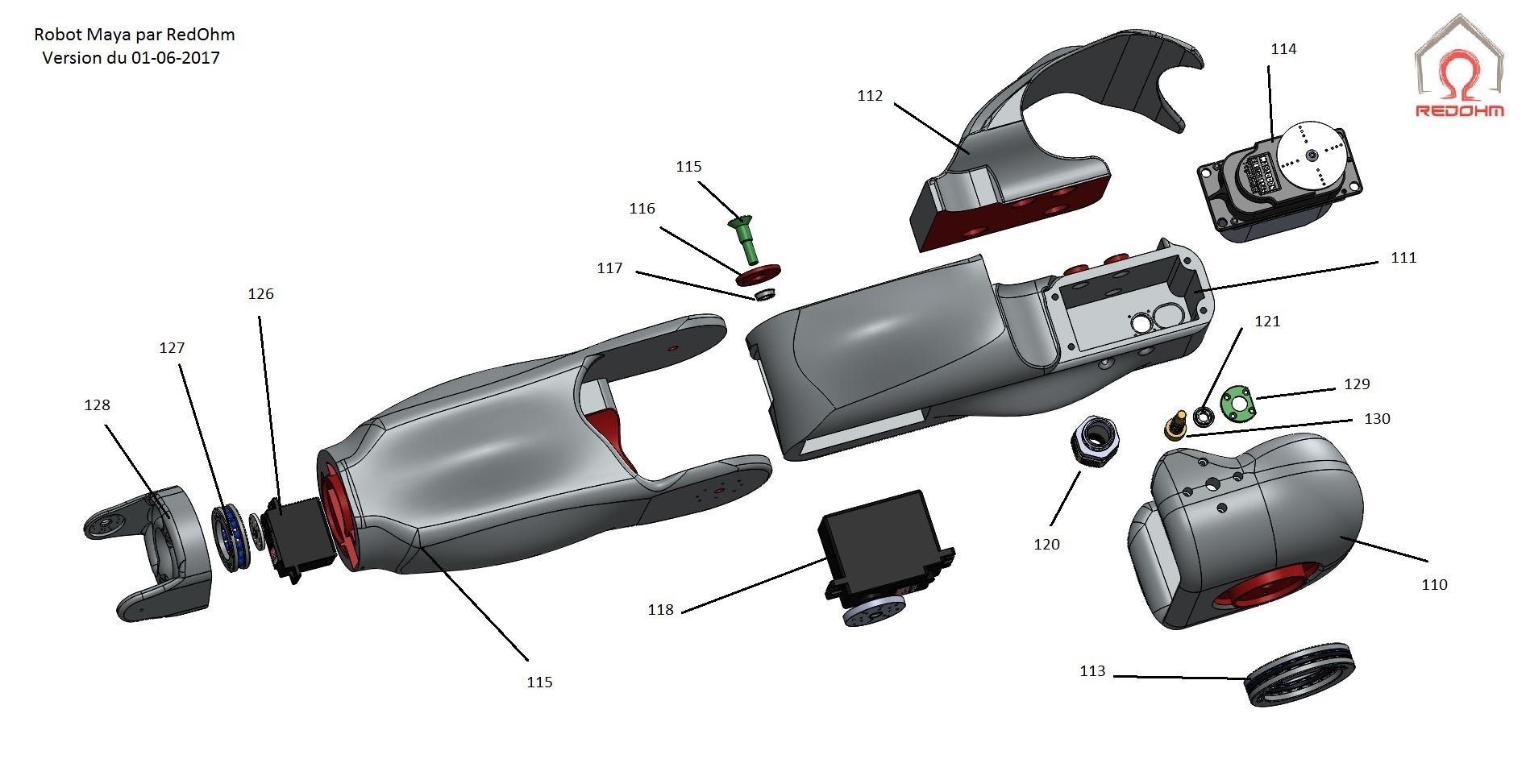
- Éclatée de la main sous différents angles
- Vidéo de l’éclatée de la main droite de Maya
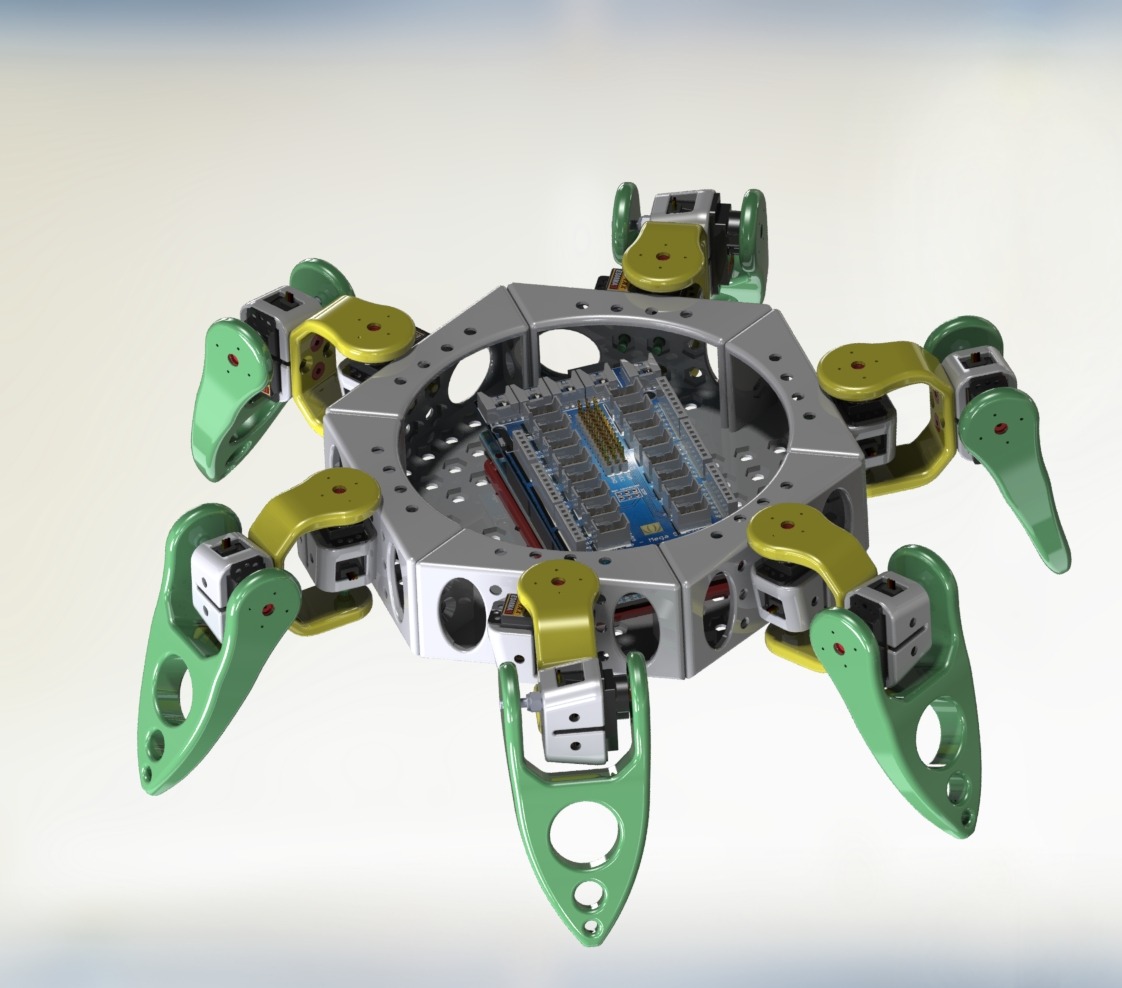
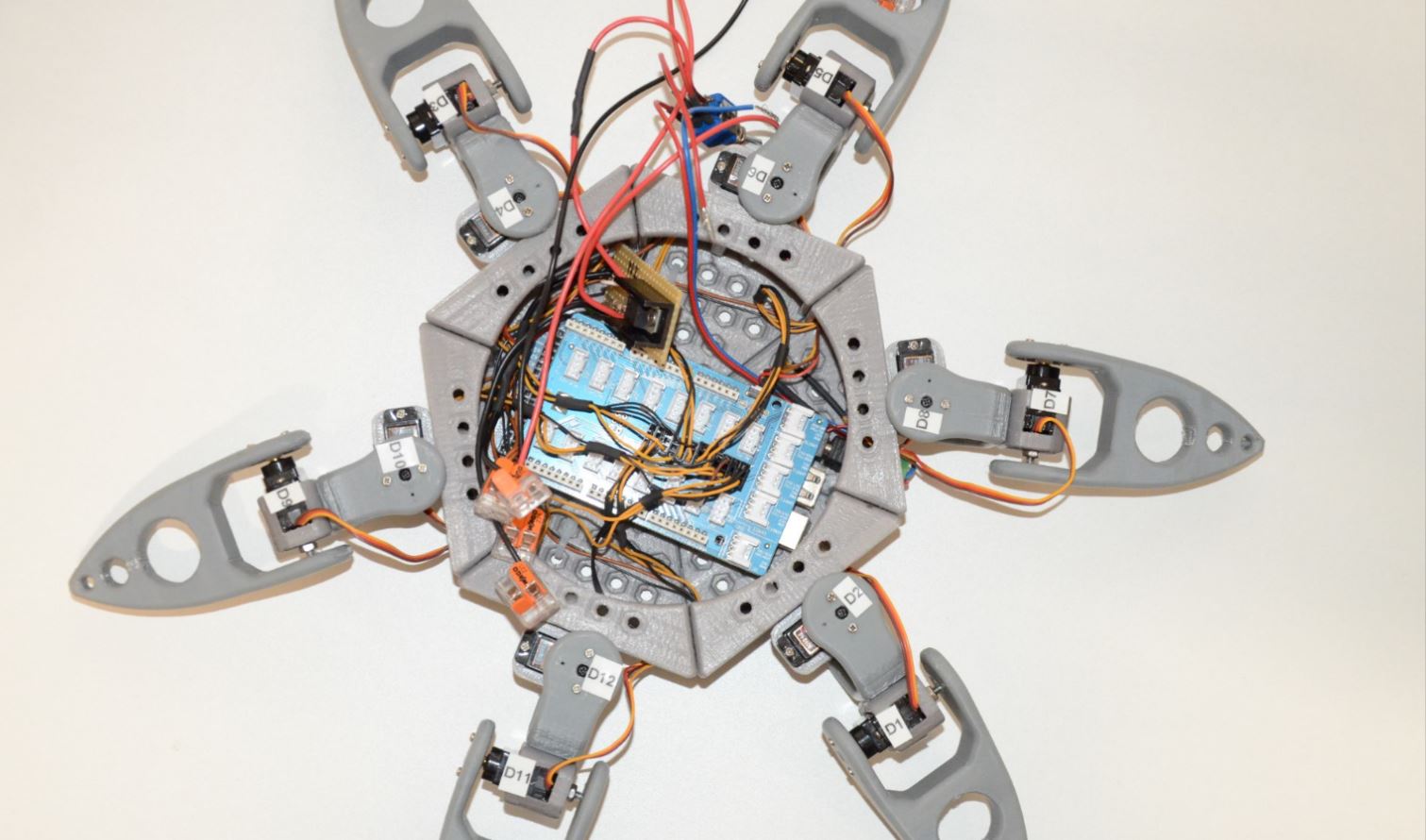
- Vidéo du montage de la main droite de Maya
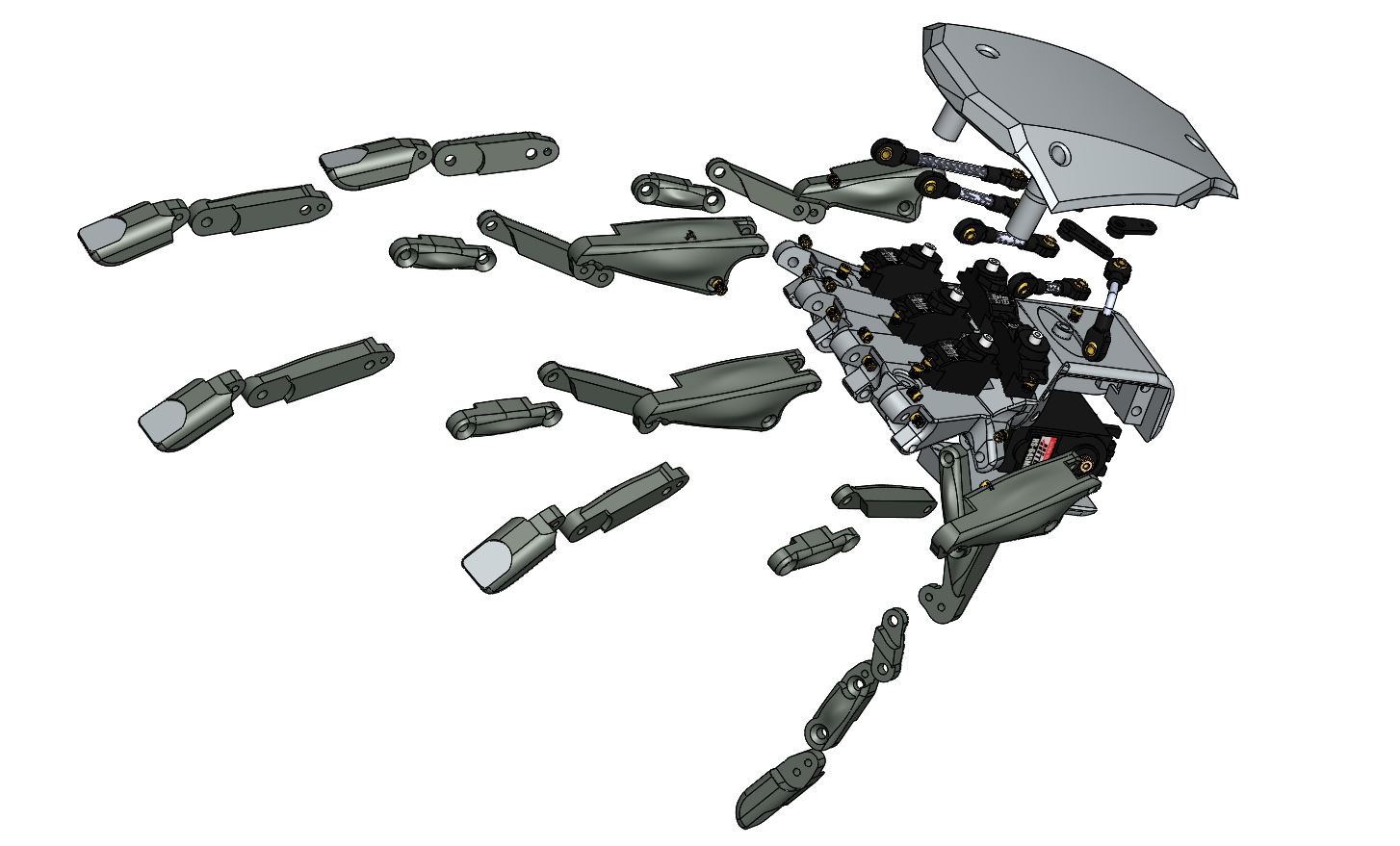
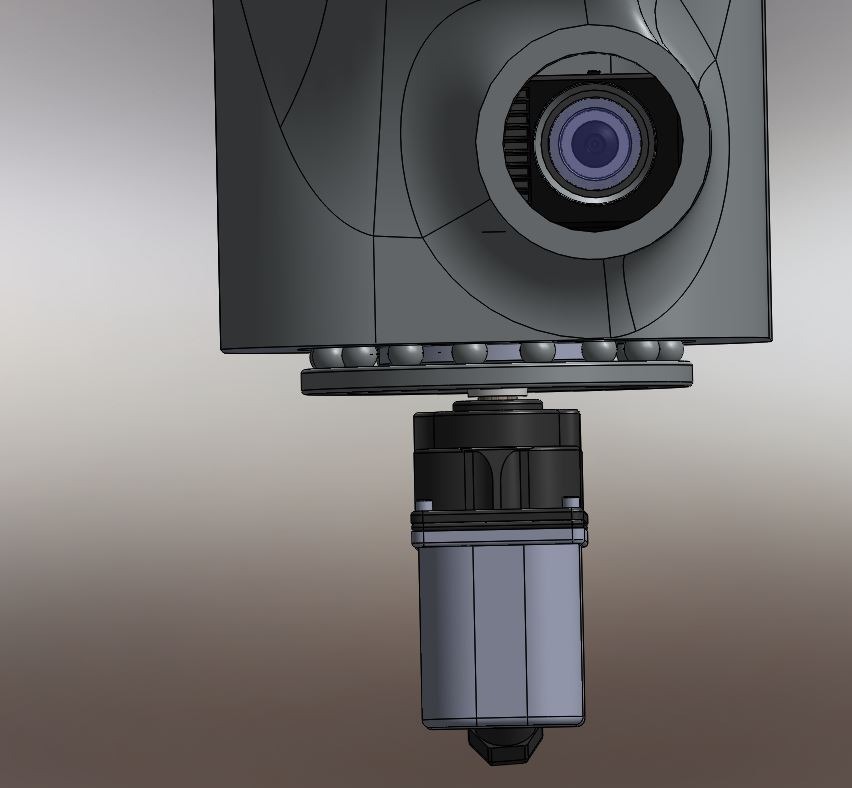
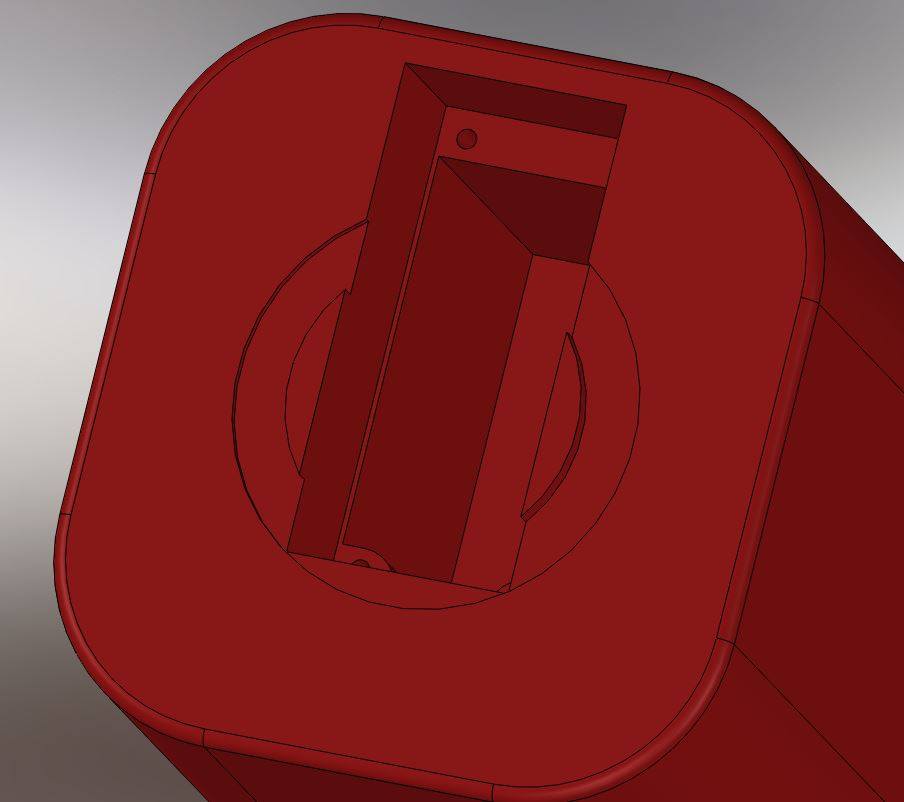
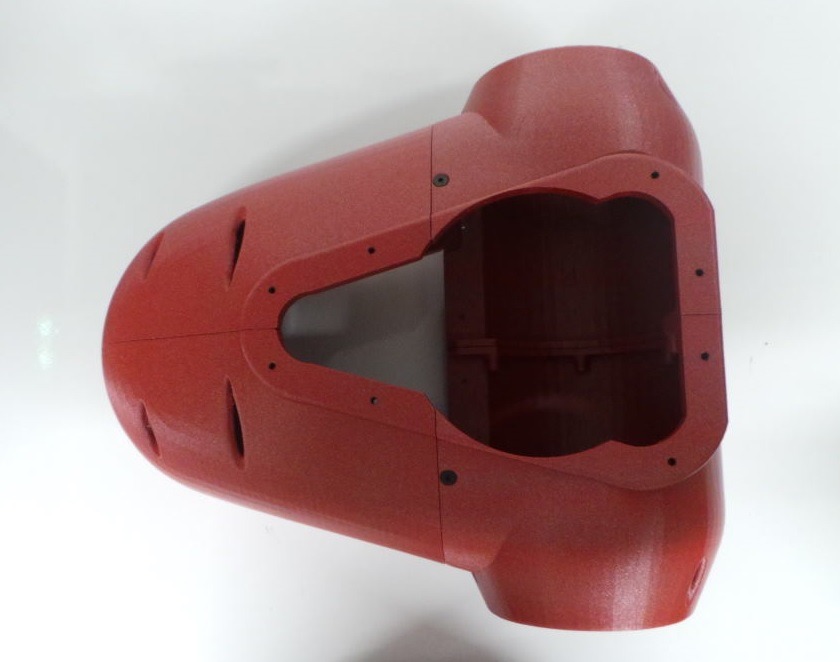
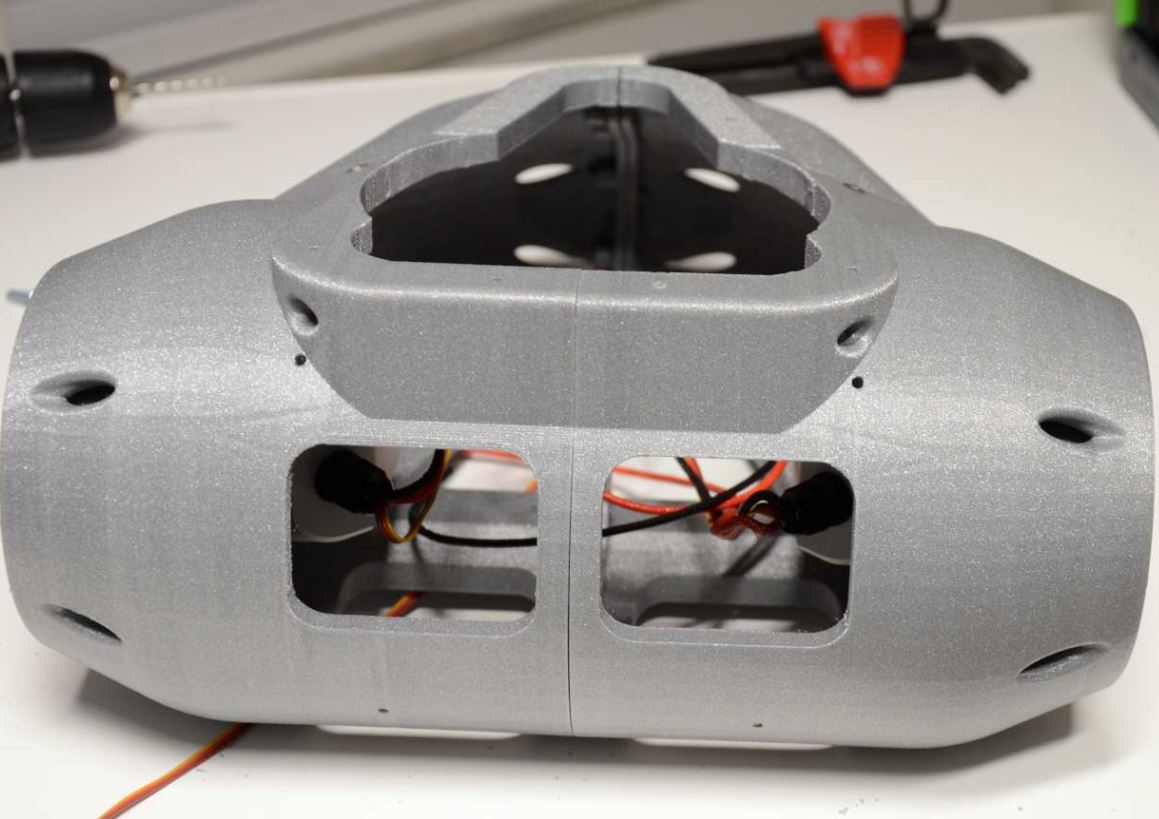
Vue éclatée de la main du Robot Maya – RedOhm
Éclatée de la main sous différents angles |
Vidéo de l’éclatée de la main droite de Maya |
Montage de la main de Maya |