–
Mise à jour le 20/10/2017 . Dans cet article vous trouverez les caractéristiques principales de la carte Arduino Mega 2560 , ainsi que les cartes additives de différents constructeurs pour son utilisation .

Sommaire :
.
Son fonctionnement est le même que celui du radar, la différence étant le domaine spectral dans lequel il travaille et le type de faisceau utilisé : alors que le radar fonctionne dans le domaine des ondes radio, le lidar couvre en particulier le domaine du visible, et également les domaines ultraviolet (UV) et infrarouge (IR), d’autre part, le lidar utilise un faisceau laser, tandis que le radar utilise un faisceau électromagnétique classique, non polarisé.
Un lidar se compose d’un système laser chargé d’émettre l’onde lumineuse, d’un télescope qui récoltera l’onde rétrodiffusée par les particules rencontrées, et d’une chaîne de traitement qui quantifiera le signal reçu.
Le principe de la télémétrie (détermination de la distance d’un objet), qui concerne une grande partie des applications du lidar, requiert généralement l’utilisation d’un laser impulsionnel. La distance est donnée par la mesure du délai entre l’émission d’une impulsion et la détection d’une impulsion réfléchie, connaissant la vitesse de la lumière.
.
Retour au sommaire.
Différents types de matériels |

Capteur optique de mesure de distance compact et de haute performance
Information technique sur ce matériel
Retour au menu tutoriel
.
Retour au sommaireModule laser LIDAR-Lite V3 de Garmin permettant de mesurer des distances de 0 à 40 m. Ce module communique avec un microcontrôleur type Arduino via une liaison PWM ou I2C.
Il est paramétrable pour obtenir un compromis entre précision, plage de mesure et temps d’acquisition. Il est compact, léger et économe en énergie. Applications: drones, robots, modélisme, etc.
Remarque: ce module utilise un laser de Classe 1, sans danger dans des conditions d’utilisation normales. Il est cependant recommandé de ne pas regarder directement le capteur de face.
.
.
.
Documentation constructeur Garmin.
.
est un scanner laser petit, abordable et précis qui est parfait pour les applications robotiques. Le URG-04LX-UG01 est capable d’indiquer la distance de 20 mm à 5600 mm (résolution 1 mm) dans un arc de 240º (résolution angulaire 0,36º). Sa consommation énergétique, 5 V 500 ma, lui permet d’être utilisé sur des plateformes alimentées par batterie. Il est idéal pour les étudiants et les chercheurs en robotique.

LASER LIDAR URG-04LX-UG01 Hokuyo
.
La portée de détection URG-04LX-UG01 d’Hokuyo est de 20 mm à 5600 mm.
– 100 m sec/balayage
– Tension de fonctionnement 5 V
– Portée de balayage 240° avec résolution angulaire de 0,36°
Constructeur : Hokuyo
Logiciel : Logiciels et pilotes Hokuyo
.
Retour au sommaire![]()
Pour tout problème |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour en haut de page
Mise à jour le 22/03/2017
Le but de cet exemple n’est pas d’optimisé le programme mais de montrer le principe de fonctionnement de celui-ci ( dans la partie void setup la présentation du numéro de l’exemple idem à l’exemple 86 )
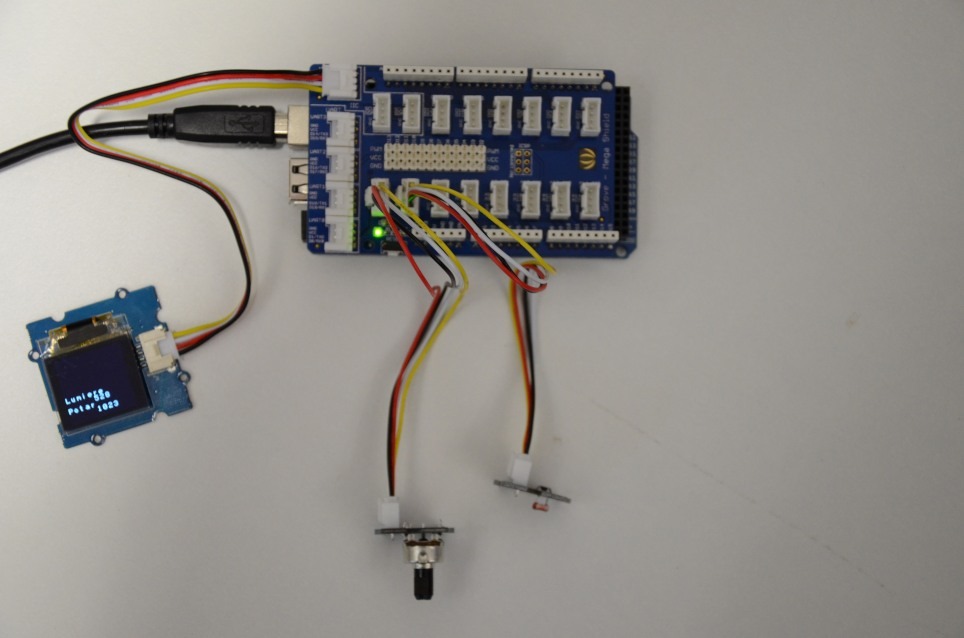
Exemple 87. Affichage de valeur analogique
Matériel nécessaire
– 1 Carte Arduino Mega 2560
– 1 Carte Grove Mega Shield
– 1 Afficheur Oled 96×96 OLE42178P
– 1 Détecteur de lumière Grove SEN11302P
– 1 Module potentiomètre Grove COM08212P
A savoir
– la fonction d’initialisation setup() qui est exécutée une seule fois au démarrage.Cette fonction est utilisée pour initialiser les variables, le sens des broches, les librairies utilisées
– la fonction « boucle sans fin » loop() qui est exécutée en boucle une fois que la fonction setup() a été exécutée une fois.
– Toutes les lignes qui commencent par // sont ignorées par le compilateur et sont appelées des commentaires.Les commentaires sont des lignes de texte incluses dans le programme, de plus elles n’occupent aucun espace mémoire dans le microcontrôleur
– Le code de la fonction est compris entre des accolades qui sont en quelque sorte les « bornes » délimitant la fonction.Les accolades sont un élément majeur de la programmation en langage C. Elles sont utilisées dans plusieurs constructions différentes.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 |
// // // *************************************************** // * Programme réaliser par RedOhm * // * * // * 1- Positionnement d'un texte sur plusieurs * // * lignes * // * 2- une pause de 3 secondes * // * 3- efface l'ecran * // * 4- recuperation et affichage des entrees * // * analogique * // * * // * * // * H.Mazelin * // *************************************************** //Cette bibliothèque vous permet de communiquer avec des périphériques I2C #include <Wire.h> //bibliothèque de gestion de l’afficheur SeeedGrayOLED.h #include <SeeedGrayOLED.h> // avr/pgmspace.h .Afin de Stocker les données dans la mémoire // Flash (mémoire programme) au lieu de la mémoire SRAM #include <avr/pgmspace.h> // Potentiometre connectée a l'entrée analogique 0 const int potentiometrePin =0; // Détecteur de lumière Grove SEN11302P connectée a l'entrée analogique 2 const int lumierePin = 2; // Un programme Arduino doit impérativement contenir cette fonction . // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // etc… ( void setup ) void setup() { //initialise la librairie Wire et se connecte au bus I2C //cette instruction ne doit normalement n'être appelée qu'une seule fois Wire.begin(); //initialiser l'écran OLED SEEED SeeedGrayOled.init(); //Effacer l'écran SeeedGrayOled.clearDisplay(); //Réglage du mode d'affichage en normal SeeedGrayOled.setNormalDisplay(); // Passez en mode vertical pour l'affichage du texte SeeedGrayOled.setVerticalMode(); { //Réglez le niveau Niveaux de gris. Ne importe quel nombre entre 0-15. SeeedGrayOled.setGrayLevel(15); //position du curseur pour régler ligne 1, colonne 0 SeeedGrayOled.setTextXY(1,0); // Afficher RedOhm SeeedGrayOled.putString("RedOhm"); //position du curseur pour régler ligne 2, colonne 3 SeeedGrayOled.setTextXY(2,3); // Afficher Bonjour SeeedGrayOled.putString("bonjour"); //position du curseur pour régler ligne 5, colonne 3 SeeedGrayOled.setTextXY(5,0); // Afficher Exercice SeeedGrayOled.putString("Exercice"); //position du curseur pour régler ligne 6, colonne 5 SeeedGrayOled.setTextXY(7,5); // N 87 SeeedGrayOled.putString("N 87"); // pause de 3 secondes delay (3000); //initialiser l'écran OLED SEEED SeeedGrayOled.init(); //Effacer l'écran SeeedGrayOled.clearDisplay(); } } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { //position du curseur pour afficher potemtiometre ligne 9, colonne 0 SeeedGrayOled.setTextXY(9,0); // affiche le nom Potar SeeedGrayOled.putString("Potar"); //position du curseur pour afficher lumiere ligne 7, colonne 0 SeeedGrayOled.setTextXY(7,0); // affiche le nom lumiere SeeedGrayOled.putString("Lumiere"); // lit la tension présente sur la broche analogique pin.La fonction // analogRead() renvoie la valeur lue , convertie en un entier // compris entre 0 et 1023 int valeurpo = analogRead(potentiometrePin); int valeurlumiere = analogRead(lumierePin); // debut du traitement efface 1 // si la valeur valeurpo et strictement inférieure à 10 // efface le derniere caractere if (valeurpo<10) { //position du curseur pour effacer le dernier caractére ligne 10, colonne 6 SeeedGrayOled.setTextXY(10,6); // affiche un espace vide SeeedGrayOled.putString(" "); } // si la valeur valeurpo et strictement inférieure à 100 // efface le derniere caractere else if (valeurpo<100) { //position du curseur pour effacer le dernier caractére ligne 10, colonne 7 SeeedGrayOled.setTextXY(10,7); // affiche un espace vide SeeedGrayOled.putString(" "); } // si la valeur valeurpo et strictement inférieure à 1000 // efface le derniere caractere else if (valeurpo<1000) { //position du curseur pour effacer le dernier caractere ligne 10, colonne 8 SeeedGrayOled.setTextXY(10,8); // affiche un espace vide SeeedGrayOled.putString(" "); } // fin de traitement efface 1 // debut du traitement efface 2 // si la valeur valeurpo et strictement inférieure à 10 // efface le derniere caractere if (valeurlumiere<10) { //position du curseur pour effacer le dernier caractére ligne 8, colonne 6 SeeedGrayOled.setTextXY(8,6); // affiche un espace vide SeeedGrayOled.putString(" "); } // si la valeur valeurpo et strictement inférieure à 100 // efface le derniere caractere else if (valeurlumiere<100) { //position du curseur pour effacer le dernier caractére ligne 8, colonne 7 SeeedGrayOled.setTextXY(8,7); // affiche un espace vide SeeedGrayOled.putString(" "); } // si la valeur valeurpo et strictement inférieure à 1000 // efface le derniere caractere else if (valeurlumiere<1000) { //position du curseur pour effacer le dernier caractere ligne 8, colonne 8 SeeedGrayOled.setTextXY(8,8); // affiche un espace vide SeeedGrayOled.putString(" "); } // fin de traitement efface 2 //position du curseur pour régler ligne 10, colonne 5 SeeedGrayOled.setTextXY(10,5); // Affiche la valeur du potentiometre SeeedGrayOled.putNumber(valeurpo); //position du curseur pour régler ligne 8, colonne 5 SeeedGrayOled.setTextXY(8,5); // Affiche la valeur du detecteur de lumiere SeeedGrayOled.putNumber(valeurlumiere); } |
Mise à jour le 19/01/2017
Le but de cet exemple n’est pas d’optimisé le programme mais de montrer le principe de fonctionnement de celui-ci.
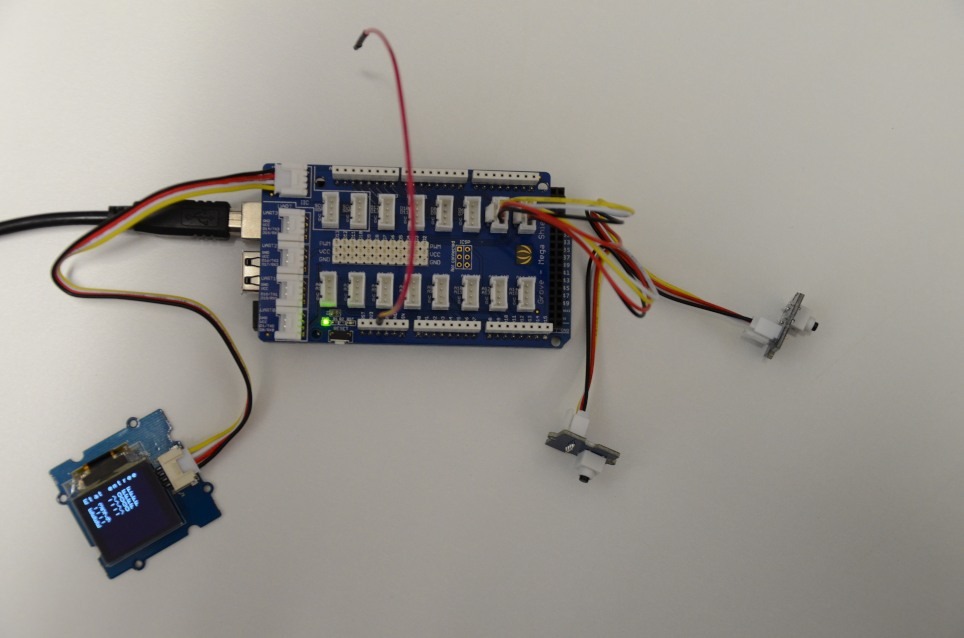
Matériel nécessaire
– 1 Carte Arduino Mega 2560
– 1 Carte Grove Mega Shield
– 1 Afficheur Oled 96×96 OLE42178P
– 1 Bouton poussoir ou un fil shunt
A savoir
– la fonction d’initialisation setup() qui est exécutée une seule fois au démarrage. Cette fonction est utilisée pour initialiser les variables, le sens des broches, les librairies utilisées
– la fonction “boucle sans fin” loop() qui est exécutée en boucle une fois que la fonction setup() a été exécutée une fois.
– Toutes les lignes qui commencent par // sont ignorées par le compilateur et sont appelées des commentaires. Les commentaires sont des lignes de texte incluses dans le programme, de plus elles n’occupent aucun espace mémoire dans le microcontrôleur
– Le code de la fonction est compris entre des accolades qui sont en quelque sorte les “bornes” délimitant la fonction. Les accolades sont un élément majeur de la programmation en langage C. Elles sont utilisées dans plusieurs constructions différentes.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |
// // // *************************************************** // * Programme réaliser par RedOhm * // * * // * 1- Positionnement d'un texte sur plusieurs * // * lignes * // * 2- une pause de 3 secondes * // * 3- efface l'ecran * // * 4- Un petite menu pour controler les entrees * // * * // * * // * * // * H.Mazelin * // *************************************************** //Cette bibliothèque vous permet de communiquer avec des périphériques I2C #include <Wire.h> //bibliothèque de gestion de l’afficheur SeeedGrayOLED.h #include <SeeedGrayOLED.h> // avr/pgmspace.h .Afin de Stocker les données dans la mémoire // Flash (mémoire programme) au lieu de la mémoire SRAM #include <avr/pgmspace.h> //definition du numéro de la broche pour le boutons poussoirs //correspondant const int entree03Pin = 3; const int entree05Pin = 5; const int entree07Pin = 7; const int entree09Pin = 9; // variable pour la lecture de l'état des boutons poussoirs int entree03State = 0; int entree05State = 0; int entree07State = 0; int entree09State = 0; // Un programme Arduino doit impérativement contenir cette fonction . // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // etc… ( void setup ) void setup() { Wire.begin(); //initialiser les broches des boutons-poussoirs en entrées pinMode(entree03Pin, INPUT); pinMode(entree05Pin, INPUT); pinMode(entree07Pin, INPUT); pinMode(entree09Pin, INPUT); //initialiser l'écran OLED SEEED SeeedGrayOled.init(); //Effacer l'écran SeeedGrayOled.clearDisplay(); //Réglage du mode d'affichage en normal SeeedGrayOled.setNormalDisplay(); // Passez en mode vertical pour l'affichage du texte SeeedGrayOled.setVerticalMode(); { //Réglez le niveau Niveaux de gris. Ne importe quel nombre entre 0-15. SeeedGrayOled.setGrayLevel(15); //position du curseur pour régler ligne 1, colonne 0 SeeedGrayOled.setTextXY(1,0); // Afficher RedOhm SeeedGrayOled.putString("RedOhm"); //position du curseur pour régler ligne 2, colonne 3 SeeedGrayOled.setTextXY(2,3); // Afficher Bonjour SeeedGrayOled.putString("bonjour"); //position du curseur pour régler ligne 5, colonne 3 SeeedGrayOled.setTextXY(5,0); // Afficher Exercice SeeedGrayOled.putString("Exercice"); //position du curseur pour régler ligne 6, colonne 5 SeeedGrayOled.setTextXY(7,5); // Afficher N 86 SeeedGrayOled.putString("N 86"); // pause de 3 secondes delay (3000); //initialiser l'écran OLED SEEED SeeedGrayOled.init(); //Effacer l'écran SeeedGrayOled.clearDisplay(); } } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { //position du curseur pour régler ligne 0, colonne 0 SeeedGrayOled.setTextXY(0,0); // Etat entrées SeeedGrayOled.putString("Etat entree"); // lire l'état de la valeur du bouton poussoir entree03State = digitalRead(entree03Pin); //vérifie si le bouton est appuyé if (entree03State == HIGH) { //position du curseur pour régler ligne 2, colonne 0 SeeedGrayOled.setTextXY(2,0); // Afficher E-3 ->ON SeeedGrayOled.putString("E-3 ->ON "); } else { //position du curseur pour régler ligne 2, colonne 0 SeeedGrayOled.setTextXY(2,0); // Afficher E-3 ->OFF SeeedGrayOled.putString("E-3 ->OFF"); } // lire l'état de la valeur du bouton poussoir entree05State = digitalRead(entree05Pin); ////vérifie si le bouton est appuyé if (entree05State == HIGH) { //position du curseur pour régler ligne 3, colonne 0 SeeedGrayOled.setTextXY(3,0); // Afficher E-5 ->ON SeeedGrayOled.putString("E-5 ->ON "); } else { //position du curseur pour régler ligne 3, colonne 0 SeeedGrayOled.setTextXY(3,0); // Afficher E-5 ->OFF SeeedGrayOled.putString("E-5 ->OFF"); } // lire l'état de la valeur du bouton poussoir entree07State = digitalRead(entree07Pin); //vérifie si le bouton est appuyé if (entree07State == HIGH) { //position du curseur pour régler ligne 4, colonne 0 SeeedGrayOled.setTextXY(4,0); // Afficher E-7 ->ON SeeedGrayOled.putString("E-7 ->ON "); } else { //position du curseur pour régler ligne 4, colonne 0 SeeedGrayOled.setTextXY(4,0); // Afficher E-7 ->OFF SeeedGrayOled.putString("E-7 ->OFF"); } // lire l'état de la valeur du bouton poussoir entree09State = digitalRead(entree09Pin); //vérifie si le bouton est appuyé if (entree09State == HIGH) { //position du curseur pour régler ligne 5, colonne 0 SeeedGrayOled.setTextXY(5,0); // Afficher E-9 ->ON SeeedGrayOled.putString("E-9 ->ON "); } else { //position du curseur pour régler ligne 5, colonne 0 SeeedGrayOled.setTextXY(5,0); // Afficher E-9 ->OFF SeeedGrayOled.putString("E-9 ->OFF"); } } |
Matériel nécessaire
– 1 Carte Arduino Mega 2560
– 1 Carte Grove Mega Shield
– 1 Afficheur Oled 96×96 OLE42178P Continuer la lecture
Mise à jour le 08/03/2015
Module graphique Oled 96 x 96 points à 16 niveaux de gris compatible Grove présentant une haute luminosité, un bon contraste, un grand angle de vue et une faible consommation.
Mise à jour le 11/04/2016
Capteur de lumière UV compatible Grove basé sur le circuit GUVA-S12D avec une plage de 200 à 370 nm.Le module émet un signal électrique qui varie avec l’intensité du rayonnement UV
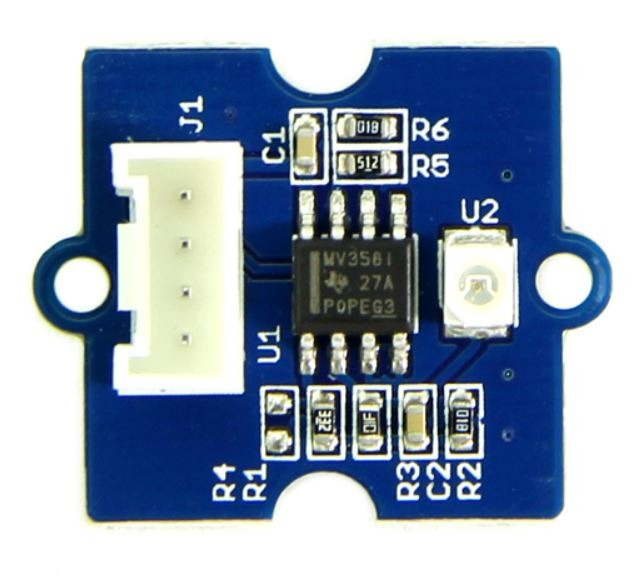
Interface: compatible Grove
Alimentation: 5 Vcc
Plage de mesure: 200 à 370 nm
Temps de réponse: 20 à 30 s
Dimensions: 20 x 20 mm
Température de service: -30°C à +85°C
Connectique uniquement compatible avec le système Grove
Référence fabricant Seeedstudio: 101020043 (remplace SEN00700P)
Prix en général de 8 à 12€ suivant fournisseur
Quelques information supplémentaires
UV-A, UV-B , UV-C
Ces trois types de rayonnements UV sont classés en fonction de leur activité biologique et de leur pouvoir de pénétration de la peau. Ils correspondent à trois plages de longueurs d’onde. Plus le rayonnement UV a une longueur d’onde longue, moins il est nocif (il se rapproche de la lumière visible) mais plus il a un pouvoir de pénétration cutanée important. Quand sa longueur d’onde diminue, il possède plus d’énergie, se rapproche des rayons X et donc est plus destructeur.
UV-A (400-315 nm) :
Les UV-A, dont la longueur d’onde est relativement longue, représentent près de 95 % du rayonnement UV qui atteint la surface de la Terre. Ils peuvent pénétrer dans les couches profondes de la peau.
UV-B (315-280 nm) :
Les UV-B, de longueur d’onde moyenne, ont une activité biologique importante, mais ne pénètrent pas au-delà des couches superficielles de la peau, ils sont relativement absorbés par la couche cornée de l’épiderme (mélanine). Une partie des UV-B solaires sont filtrés par l’atmosphère.
UV-C (280-100 nm) :
Les UV-C, de courte longueur d’onde, sont les UV les plus énergétiques ainsi que les plus nocifs (l’énergie croît quand la longueur d’onde décroît), mais ils sont complètement filtrés par la couche d’ozone de l’atmosphère et n’atteignent donc pas théoriquement la surface de la Terre. Toutefois, des lampes UV-C sont utilisées en laboratoire de biologie pour les effets germicides, afin de stériliser des pièces ou des appareils
Exemple d’application des UV
Exemple de programme du constructeur
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
void setup(){ Serial.begin(9600); } void loop() { int sensorValue; long sum=0; for(int i=0;i<1024;i++) { sensorValue=analogRead(A0); sum=sensorValue+sum; delay(2); } sum = sum >> 10; Serial.print("La valeur de la tension:"); Serial.print(sum*4980.0/1023.0); Serial.println("mV"); delay(20); Serial.print("\n"); } |
Source technique : Seedwiki ,
![]()
Mise à jour le 08/01/2015

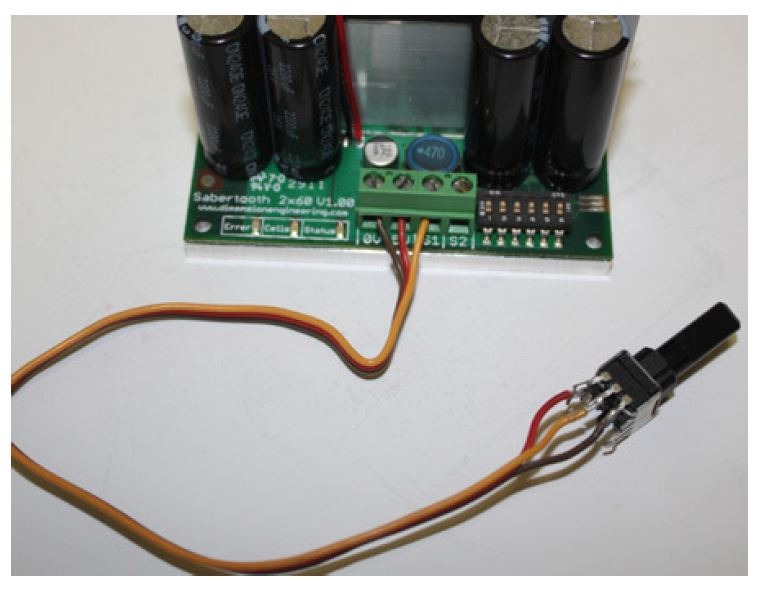
– La carte SaberTooth 2 x 60 est idéale pour les commandes différentielles de robots, les tanks, voitures et bateaux, etc. Elle convient pour des poids de 450 kg (55 kg pour des robots de combat). La commande des deux moteurs CC à balais peut se faire à l’aide d’une tension analogique, d’un signal RC ou d’un signal série.
La carte SaberTooth possède des modes indépendants pour la vitesse et la direction, facilitant la commande différentielle. Lors de chaque ralentissement ou changement de sens de rotation du moteur, la carte recharge la batterie, permettant une autonomie accrue du robot.
Elle autorise les brusques changements de direction et les arrêts rapides. Une sortie 5 Vcc est disponible pour alimenter un microcontrôleur ou un récepteur RC.
Ce type de carte est utilisé dans notre châssis LL-1.01 , HM-3.10.
Caractéristiques:
Alimentation: 6 à 30 Vcc (NiCd, NiMh, Lithium, accu au plomb)
Cette carte ne peut pas être alimentée par une alimentation secteur.
Courant de sortie: 2 x 60 A en continu (2 x 120 A en pointe)
Signal de commande:
– tension analogique 0 à 5 Vcc
– signal radio RC
– liaison série
Indication de statut par Leds
Protection thermique et contre les surcharges
Dimensions: 89 x 76 x 47 mm
Poids: 250 gr
Le mode de fonctionnement se sélectionne avec les interrupteurs DIP présent sur la carte. Les modes de fonctionnement sont : tension analogique de 0 à 5 Vcc, signal radio RC venant d’une télécommande ou une liaison série
La carte Sabertooth est le premier pilote moteur synchrone régénératrice dans sa catégorie. Le fonctionnement régénératrice signifie que vos batteries sont rechargées à chaque fois que vous ralentissez ou vous changez de sens de déplacement. La carte vous permet également de faire des arrêts très rapides.
La carte peut alimenter en 5V votre récepteur RC ou votre carte microcontrôleur.
Les transistors de la carte sont commutés à une vitesse 24kHz pour un fonctionnement silencieux.
Fabricant: Dimension Engineering
Schéma de montage pour un ensemble 4 roues motrices
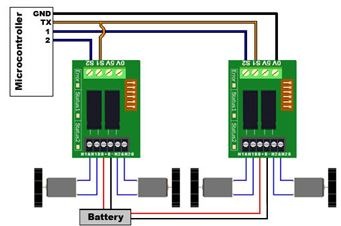
SaberTooth 2x60A – Montage en 4 roues motrices
Câblage par récepteur RC et alimentation du module de réception en 5V cc

SaberTooth 2x60A – Câblage pour un pilotage avec un récepteur RC avec alimentation de celui-ci
![]()
