
Mise à jour le 19/02/2020 : Dans cet article vous trouverez les caractéristiques principales de la carte LattePanda 2 GB/32 GB ou sous la référence constructeur DFR0418
Archives de catégorie : Hardware/Software
Mise à jour le 15/11/2020: Ce télémètre compatible Grove permet de mesurer la distance de 3cm à 4m avec une resolution de 1cm , sans contact à l’aide de transducteurs à ultrasons.
Mise à jour le 03/04/2019 .Dans cet article vous trouverez les caractéristiques principales de la carte Teensy 3.2 , ainsi que les cartes additives de différents constructeurs pour son utilisation .
Mise à jour le 08/01/2020.Article expliquant la syntaxe du langage de programmation et l’ensemble des règles d’écriture liées à ce langage .Voici donc les règles qui régissent l’écriture du langage Arduino.
Arduino ensemble des cartes mères utilisé
par RedOhm
Mise à jour le 11/09/2016
Sommaire
- Guide pour bien choisir votre Arduino
- Arduino Uno ->
- Arduino + LCD 3,5 pouces
- Caractéristiques principales de l’Arduino + LCD 3,5 pouces
- Caractéristiques affichage LCD.
- Caractéristiques Arduino Controleur
- Arduino Mega 2560 Rev3
- Présentation de la carte Arduino Mega 2560.
- Caractéristiques principales de l’Arduino Mega 2560.
- Arduino Due
- Présentation de la carte Arduino Due.
- Arduino Intel Galileo
- Présentation de la carte Arduino Galileo.
- Composants clés de la carte Arduino Galileo.
- Carte mère série pro
L’ensemble de la gamme Arduino et programmables via un langage proche du « C » (disponible en libre téléchargement), les modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un logiciel fonctionnant sur un ordinateur.
***
Guide pour bien choisir votre Arduino |
|||||||||
| Type | Micro | Tension d’alimentation | Tension des bornes | Vitesse | Entrée Sortie | Entrée analogique | PWM | Sortie Ana |
UART |
| Arduino Nano 3.0 | ATMega328 | via port USB ou 5 Vcc régulée sur broche 27 ou 6 à 20 V non régulée sur broche 30 |
5 Volts | 16Mhz | 14 | 8 | 6 | 0 | |
| Arduino Uno R3 | ATmega328 | 7-12 Volts | 5 Volts | 16Mhz |
14 dont 6 disposent d’une sortie PWM |
6 | 6 | 0 | 1 |
| Arduino + LCD 3,5 ( clone) |
ATmega328p | 6-9 Volts | 5 Volts | 16Mhz | 14 | 6 | 6 | 0 | 1 |
| Arduino Mega 2560 R3 | ATmega2560 | 7-12 Volts | 5 Volts | 16MHz | 54 | 16 | 14 | ||
|
Arduino DUE |
AT91SAM3X8E | 3.3Volts | 84MHz | 54 broches d’E/S dont 12 PWM | 12 | 2 | 4 | ||
| Arduino Pro 328 | ATmega32U4 | 7-12 Volts | 3.3Volts | 8Mhz | 14 | 6 | 6 | ||
***
Arduino + LCD 3,5 pouces |

Ce module arLCD de EarthMake combinant une carte compatible Arduino Uno R3 avec un écran tactile LCD couleur de 3,5″ vous permet de réaliser un projet évolué très rapidement. La partie Arduino Uno est compatible avec la plupart des shields disponibles.
La carte Arduino se programme de la même manière qu’une carte Arduino classique via le logiciel IDE Arduino (cordon USB inclus).
La partie affichage LCD n’utilise que les entrées D0 et D1 et laisse libres toutes les autres entrées/sorties. Une librairie ezLCD est disponible pour l’affichage et le contrôle tactile sur l’écran LCD.
Caractéristiques principales du Arduino + LCD 3,5 » ( clone )
Affichage LCD
- 6-9V Tension de fonctionnement
- Arduino Uno R3 Compatible
- 3.5 « couleur TFT (Thin-Film Transistor) écran tactile LCD
- Résolution 320 x 240
- Couleurs 65k
- LCD rétro-éclairage
- 1 Rapport de contraste: 500
- 16-bit GPU
- Mémoire 4Mo Flash
- USB Mini-B Câble
Arduino Controleur
- Arduino UNO R3 compatible
- Processeur: 5 volts 16 MHz ATmega328
- E / S numériques: 14 (avec PWM disponible sur 6)
- Entrée analogique: 6
- Mémoire: Flash: 32k-.5k pour le chargement au démarrage
- SRAM: 2K
- 1K EEPROM
Cliquez sur ⇒ plus d’informations sur Arduino + LCD 3,5 »
Ou trouver le module arLCD – 3.5 écran tactile » ; Sparkfun
***
Arduino Mega 2560 Rev3 |
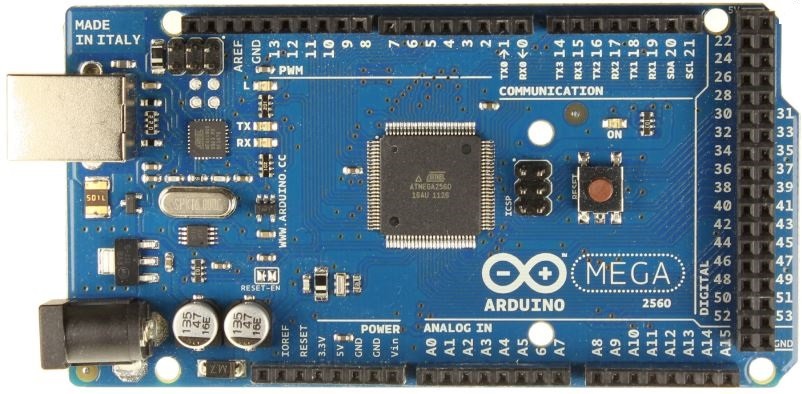
Arduino Mega 2650
1. Présentation de la carte Arduino Mega 2560 .
La carte Arduino Mega 2560 a été conçue comme la remplaçante de la carte Arduino Mega. Elle est dotée d’un microcontrôleur ATMega2560 disposant d’une mémoire flash de 256 KB, dont 8 KB dévolus au Bootloader ( Bootloader ? => il permet de télécharger vos programmes entre l’IDE Arduino (interface de développement) et votre Arduino; également la possibilité de pouvoir exécuter votre programme lors du démarrage de l’Arduino. ).
2. Caractéristiques principales.
– version: Rev. 3
– alimentation:
via port USB ou
7 à 12 V sur connecteur alim
– microprocesseur: ATMega2560
– mémoire flash: 256 kB
– mémoire SRAM: 8 kB
– mémoire EEPROM: 4 kB
– 54 broches d’E/S dont 14 PWM
– 16 entrées analogiques 10 bits
– intensité par E/S: 40 mA
– cadencement: 16 MHz
– 3 ports série
– bus I2C et SPI
– gestion des interruptions
– fiche USB B
– dimensions: 107 x 53 x 15 mm
Version d’origine fabriquée en Italie.
Cliquez sur ⇒ plus d’informations sur Arduino Mega 2560 Rev3
Prix moyen : De 39€ à 49 €
Ou trouver le module Arduino Mega : Gotronic ,Lextronic , RS Composant
***
Carte Arduino Due |
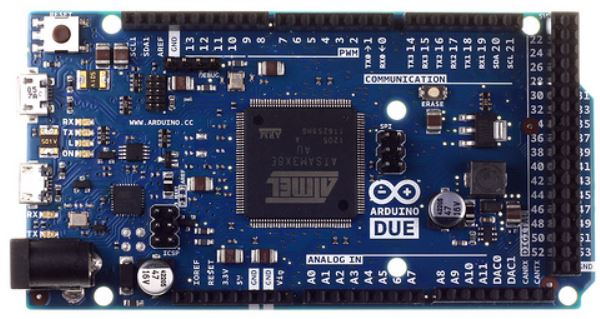
Arduino Due
La carte Arduino DUE est basée sur un Atmel ARM Cortex SAM3X8E cadencé à 84 MHz sous 32 bits. Elle dispose de 54 E/S dont 12 PWM, 12 analogiques et 4 UARTs. Elle est idéale pour des applications exigeant des caractéristiques plus complètes que la Uno.
Contrairement aux autres cartes Arduino, Les entrées/sorties fonctionnent sous 3,3 Vcc, l’utilisation de 5 Vcc en entrée ou en sortie n’est pas possible. Une tension supérieure endommagera la carte.
Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires. Elle peut se programmer avec le logiciel Arduino.
Un ATMega 16U2 permet la programmation du SAM3X8E via le logiciel Arduino (via le port Micro USB de programmation). Un deuxième port USB est relié directement sur le SAM3X8E permettant l’utilisation de clavier, souris etc.
Caractéristiques principales:
– version: Rev 3
– alimentation:
via port USB ou
7 à 12 V sur connecteur alim
– microprocesseur: AT91SAM3X8E
– tension d’utilisation: 3,3 Vcc
– mémoire flash: 512 kB
– mémoire SRAM: 96 kB
– 54 broches d’E/S dont 12 PWM
– 12 entrées analogiques 10 bits
– 2 sorties analogiques
– intensité par E/S: 3 ou 15 mA (selon la broche)
– intensité totale pour les sorties: 130 mA
– cadencement: 84 MHz
– 3 ports série
– bus I2C et SPI
– gestion des interruptions
– fiche micro-USB A (SAM3X8E) et micro-USB B (programmation)
– dimensions: 104 x 53 x 13 mm
Version d’origine fabriquée en Italie.
***
Carte Arduino Intel Galileo |
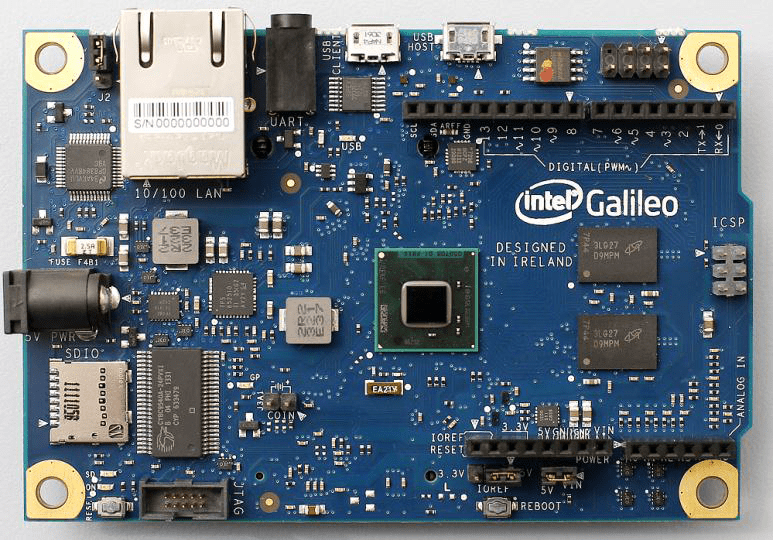
Arduino Intel Galileo
La carte Arduino Intel Galileo est une carte mère de développement basée sur le processeur Intel Quark SoC X1000, un système sur puce (SoC) Intel Pentium 32-bit. Il s’agit de la première carte basée sur l’architecture Intel qui peut recevoir des shields Arduino conçus pour la carte Arduino Uno R3. Les pins numériques de 0 à 13 (et les pins adjacents AREF et GND), les entrées analogiques 0 à 5, le header d’alimentation, le header ICSP et les pins du port UART (0 et 1) sont situés de manières identiques sur les cartes Arduino Intel Galileo et sur la carte Arduino Uno. Ce concept est également connu sous le nom dee brochage (« pinout ») Arduino 1.0.
La carte Arduino Intel Galileo a été conçue pour soutenir des shields qui fonctionnent soit à 3.3V ou à 5V. La principale tension de fonctionnement de la carte Arduino Intel Galileo est de 3.3V. Cependant un jumper sur la carte permet un passage de tension de 3.3v à 5V sur les pins d’entrées et de sorties. Cela fournit un soutien pour les shields Uno fonctionnant avec 5V et représente le comportement par défaut. En changeant la position du jumper, la tension de fonctionnement peut être ramenée à 3.3V sur les pins I/O.
En plus de la compatibilité matériel et logiciel Arduino, la carte Arduino Intel Galileo dispose également de la connectique pour étendre son usage et ses capacités au-delà de l’écosystème Arduino Shield: Mini-PCI Express, Ethernet 10/100 Mbps, Micro-SD, USB client, USB hôte, port série RS-232, port USB Host, port USB client et 8MByte NOR Flash.
Composants clés de la carte Arduino Galileo.
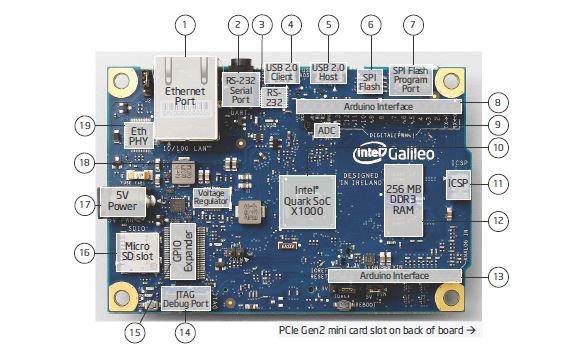
Composants clés de la carte Arduino Galileo
-
- Port Ethernet: Connecteur 10/100 Ethernet
- Port Série RS-232: Jack 3.5mm 3 pins
- Emetteur-récepteur RS-232
- Port client USB: Connecteur client USB: (Micro-USB Type B)
- Port hôte USB: Connecteur USB hôte 2.0 (Micro-USB Type AB)
- Mémoire Flash SPI: Mémoire Flash SPI pour stocker le firmware (ou le bootloader) et les derniers sketchs
- Port de programmation SPI: Header 7-pin pour une programmation via SPI (Serial Peripheric Interface)
- Interface Shield: Compatible avec le brochage de l’Arduino UNO R3
- CAN: Convertisseur analogique-numérique
- Intel® Quark SoC X1000: Processeur Intel® Pentium 400 MHz 32-bit
- Header ICSP: Header 6 pins pour la programmation série ‘En circuit’
- 256 MB DDR3 RAM
- Interface Arduino: Compatible avec le brochage de l’Arduino UNO R3
- Port Debug JTAG: Header 10 pins JTAG pour le debugging
- Extenseur GPIO
- Lecteur de carte MicroSD: Supporte les cartes MicroSD jusqu’à 32 GO
- Alimentation 5V: La carte est alimentée par un adaptateur AC-DC
- Régulateur de tension: Génère 3.3V d’alimentation
- Eth PHY: Physical layer Ethernet
Prix moyen : De 65€ à 75 €
Ou trouver le module Arduino Mega : Generationrobots
Carte mère série pro |

Carte Arduino M0 Pro
La carte Arduino M0 Pro est basée sur un Atmel ARM Cortex SAMD21 cadencé à 48 MHz sous 32 bits. La version pro est équipée d’un second microcontrôleur EDBG (AT32UC3A4256) et d’un second port USB permettant le débogage et la programmation du SAMD21 via le logiciel Arduino. Cette carte permet d’obtenir de meilleures performances, une meilleure flexibilité que la UNO et permet l’initiation au développement sur une architecture 32 bits.
La carte Arduino M0 Pro dispose deux ports USB:
– un premier port micro-USB (Native) permet d’utiliser le M0 comme un périphérique USB (comme une souris ou un clavier connecté à un PC, hôte USB, port série via programmation) et autorise la programmation (non recommandé).
– un second port micro-USB (Programming) recommandé pour la programmation et le débogage donnant accès au microcontrôleur principal SAMD21 via le microcontrôleur EDBG. Permet de reprogrammer le microcontrôleur principal en cas de plantage.
Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires. L’Arduino M0 pro se programme avec le logiciel Arduino 1.7.8 ou supérieur disponible sur le site Arduino.
– contrairement aux autres cartes Arduino, les entrées/sorties fonctionnent sous 3,3 Vcc, l’utilisation de 5 Vcc en entrée ou en sortie n’est pas possible. Une tension supérieure endommagera la carte.
– l’intensité maximale de sortie par E/S est de 7 mA.
Caractéristiques:
Alimentation:
– via port USB ou
– 6 à 15 Vcc sur connecteur alim
Microcontrôleur: ATSAMD21G18 ARM Cortex M0 32 bits
Microcontrôleur EDBG (Atmel’s Embedded Debugger): AT32UC3A4256
Mémoire flash: 256 kb (4 kB sont utilisés pour le bootloader)
Mémoire SRAM: 32 kB
Mémoire EEPROM: aucune disponible par défaut, possibilité d’émulation dans la SRAM
Tension de sortie: 3,3 Vcc
14 broches d’E/S dont 12 PWM et série
6 entrées analogiques 12 bits ADC
1 sortie analogique 10 bit DAC
1 broche d’interruption (D2)
Intensité par E/S: 7 mA
Cadencement: 48 MHz
Bus série, I2C et SPI
2 x Fiche micro-USB:
– 1 x usb programmation
– 1 x usb classique
Fiche d’alimentation: 5,5 x 2,1 mm
Dimensions: 69 x 53 x 10 mm
Référence Arduino: A000111
Version d’origine fabriquée en Italie.
Cliquez sur ⇒ Plus d’information sur la carte Arduino M0 pro
![]()
(remplace SEN11763P)
***
Mise à jour le 09/05/2016
Sommaire :
– Présentation du module gyroscope Grove 101020050
– Brochage du capteur
– Schéma d’exploitation du capteur
– Diagramme de fonctionnement
– Initialisation du capteur
– Lecture des données du capteur
– Exemple de programme
– Téléchargement de la librairie du 09/05/2016 ( constructeur )
Présentation du Module gyroscope Grove 101020050 :
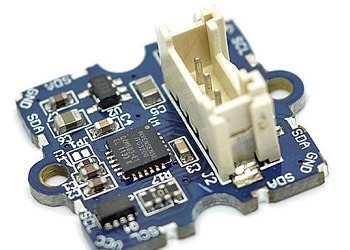
Module gyroscope Grove 101020050
Ce module gyroscope 3 axes compatible Grove est basé sur le circuit ITG3200 et communique avec le microcontrôleur via un port I2C. Le circuit ITG3200 dispose de 3 convertisseurs ADC 16 bits, d’un filtre passe-bas et d’une interface I2C rapide.
Ce module se raccorde sur un port I2C du Grove Base Shield ou du Mega Shield via un câble 4 conducteurs .
Interface: compatible Grove
Alimentation: 3 à 5 Vcc
Consommation:
– en fonctionnement: 6,5 mA
– en stand-by: 5 µA
Sorties: axes X, Y et Z
Sensibilité: 14 LSBs par °/sec
Plage de mesure: ±2000°/sec
Protocole: I2C rapide (400 kHz)
Dimensions: 20 x 20 x 13 mm
Non compatible avec Tinker Kit
Référence Seeedstudio: 101020050 (remplace SEN11763P)
Brochage du capteur :
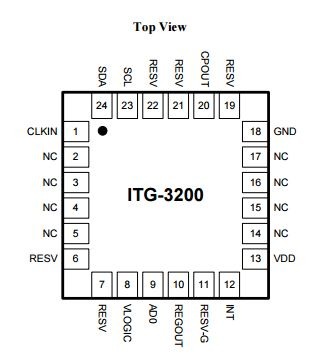
Définition des broches du capteurs |
||
| 1 | CLKIN | En option entrée d’horloge de référence externe. Connecté à GND si la broche est inutilisés. |
| 2/3/4/5 | NC | Non connecté en interne. Peut être utilisé pour la tracé de la carte |
| 6/7 | RESV | Réservé. Ne pas connecter. |
| 8 | VLOGIC | IO numérique la tension d’alimentation. VLOGIC doit être ≤ VDD en tout temps. |
| 9 | AD0 | Adresse I2C Esclave LSB |
| 10 | REGOUT | Régulateur connexion condensateur de filtrage |
| 11 | RESV | Réservé. Ne pas connecter. |
| 12 | INT | Interrupt digital output (totem pole ou drain ouvert) |
| 13 | VDD | Tension d’alimentation [ -0.5V to +6V ] |
| 14/15/16/17 | NC | Non connecté en interne. Peut être utilisé pour la tracé de la carte |
| 18 | GND | Tenion d’alimentation [ 0V ] |
| 19 | RESV | Réservé. Ne pas connecter. |
| 20 | CPOUT | Connexion condensateur |
| 21/22 | RESV | Réservé. Ne pas connecter. |
| 23 | SCL | I2C serial Horloge |
| 24 | SDA | I2C serial Données |
Schéma d’exploitation du capteur :
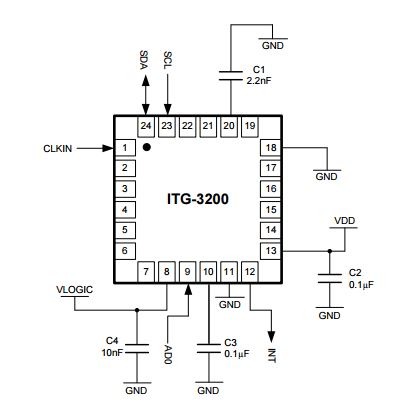
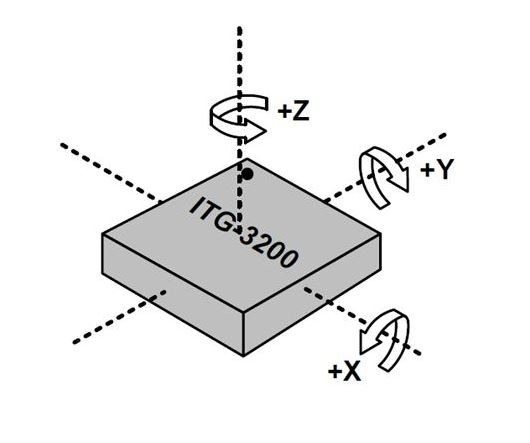
Diagramme de fonctionnement :
Le dessin ci-dessous montre les orientations des 3 axes. Vous pouvez l’utiliser pour comprendre les significations physiques du résultat.
Initialisation du capteur:
|
1 2 3 4 5 6 |
// // //calibration du gyroscope pour cela il faut 200 mesures // gyro.init(); gyro.zeroCalibrate(200,10); |
Lecture des données du capteur :
|
1 2 3 4 5 |
// // // void getXYZ(int16_t *x,int16_t *y,int16_t *z); void getAngularVelocity(float *ax,float *ay,float *az); |
Exemple de programme :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 |
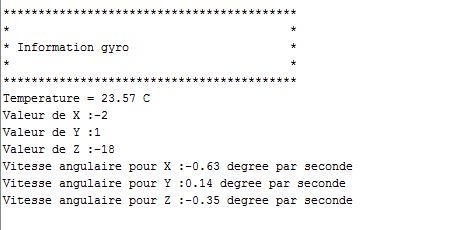
/* * * Commenté par RedOHM * et modifié d'apres les sources * orginale * * Exemple de programme pour le * gyroscope Grove SEN11763P ou * nouvelle reference 101020050 * * * 06/05/2016 */ // Initialise la library Wire et se connecte au bus I2C // Cette instruction ne doit normalement n'être appelée qu'une seule fois #include <Wire.h> // Initialise la library ITG3200 du gyroscope #include "ITG3200.h" ITG3200 gyro; // Un programme Arduino doit impérativement contenir cette fonction . // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur Serial.begin(9600); //initialisation du gyroscope gyro.init(); // calibration du gyroscope pour cela il faut 200 mesures // temps necessaire 200*10ms gyro.zeroCalibrate(200,10); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { Serial.println ("******************************************"); Serial.println ("* *"); Serial.println ("* Information gyro *"); Serial.println ("* *"); Serial.println ("******************************************"); // Affichage de la temperature Serial.print("Temperature = "); Serial.print(gyro.getTemperature()); Serial.println(" C"); int16_t x,y,z; gyro.getXYZ(&x,&y,&z); Serial.print("Valeur de X :"); Serial.println(x); Serial.print("Valeur de Y :"); Serial.println(y); Serial.print("Valeur de Z :"); Serial.println(z); //Definition de --> float //Déclaration des variables de type virgule flottante //(nombres à virgules) float ax,ay,az; gyro.getAngularVelocity(&ax,&ay,&az); Serial.print("Vitesse angulaire pour X :"); Serial.print(ax); Serial.println(" degree par seconde"); Serial.print("Vitesse angulaire pour Y :"); Serial.print(ay); Serial.println(" degree par seconde"); Serial.print("Vitesse angulaire pour Z :"); Serial.print(az); Serial.println(" degree par seconde"); Serial.println(" "); delay(1000); } |
Téléchargement du programme:
Résultat du programme sur le moniteur série :
Telechargement de la librairie du 09/05/2016 :
***
Documentation fournisseur : Gotronic
Source technique : Seeedwiki
Information complémentaire : Gitub
![]()
–
Mise à jour le 03/11/2019 . Dans cet article vous trouverez les caractéristiques principales de driver de moteur à pas utilisé par RedOhm .
Sommaire :
- Présentation d’un driver de moteur pas à pas
- Driver Big EasyDriver 2A maxi avec refroidisseur
- Présentation du driver
- Description du driver Big EasyDriver
- Commande moteur pas-à-pas DRI0043 3.5A maxi
- Driver de moteur pas-à-pas DM432C de 1.31A à 3.2A maxi
- Driver DM860 de 2.4A à 7.2A maxi
- Retour au sommaire.
.
Retour au sommaire.
![]()
Présentation d’un driver de moteur pas à pas |
Une commande de moteur ou un driver de moteur : C’est un ensemble qui entre le moteur et l’utilisateur qui permet de convertir des signaux électriques pour que le moteur puisse les interpréter.
Un Driver pilotant un moteur pas à pas peut se diviser en 2 fonctions :
L’alimentation du moteur avec ses contraintes de tensions, courants et puissances à dissiper ainsi que la protection contre les surtensions et les surintensités. C’est l’électronique de puissance.
Le séquenceur qui gère la chronologie des impulsions :
- Du sens de rotation désiré du moteur.
- De la vitesse du moteur
- De mise en sécurité du driver
A savoir:
La vitesse de rotation et le couple des moteurs pas-à-pas dépendent de la tension d’alimentation et de l’inductance (ou du courant). Une faible inductance donne un faible couple mais permet d’atteindre des vitesses plus élevées. A contrario, une inductance élevée procure un couple élevé à basse vitesse.
Le choix de l’alimentation est primordial. Si l’application nécessite une faible vitesse, il est préférable d’utiliser une tension d’alimentation proche du minimum possible, ce qui diminue le bruit et l’échauffement et augmente le couple. Une tension d’alimentation élevée donnera une grande vitesse mais au prix de plus de bruit, d’échauffement et de possibles vibrations à basse vitesse.
Il est possible d’utiliser des alimentations continues régulées ou simplement redressées et filtrées. Lors de l’utilisation d’une alimentation régulée, il faut prévoir une réserve de puissance suffisante (par exemple prévoir 4 A pour un courant de 3 A). La tension conseillée pour alimenter le driver devrait être entre 3 fois et 25 fois la tension nominale du moteur.
–
Retour au sommaire.
![]()
Commande de pas-à-pas Big EasyDriver |
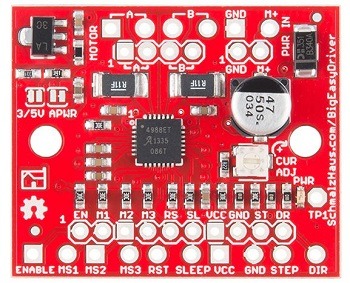 La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
Elle est basée sur le circuit Allegro A4988 et permet de contrôler un moteur pas-à-pas très facilement à partir d’un microcontrôleur (une broche pour la direction et une pour la vitesse). Le module permet de fonctionner en mode pas complet, demi-pas, quart de pas, 1/8 de pas et 1/16 de pas (mode par défaut).
Description du driver :
- Alimentation moteur: 8 à 30 Vcc maxi
- Intensité: 2 A/phase maxi (1,4-1,7 A sans refroidisseur)
- Réglage intensité: 0 à 2 A
- Régulateur 5 V/3,3 V intégré
- Driver microstepping
- Dimensions: 36 x 30 mm
- Référence Sparkfun: ROB-12859 (remplace ROB-11876)
.
![]()
Commande moteur pas-à-pas DRI0043
|
Présentation :

Commande moteur pas-à-pas DRI0043
Module économique TB6600 permettant de commander un moteur pas-à-pas bipolaire jusqu’à 3,5 A RMS à partir de 3 sorties digitales d’un microcontrôleur (Arduino par exemple).
Ce driver fonctionne en pas complet, 1/2 pas, 1/4 de pas, 1/8 de pas, 1/16 de pas et 1/32 de pas (sélection par dip-switches).
A savoir :
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
Description du driver :
- Tension d’alimentation: 9 à 42 Vcc
- Consommation maxi: 5 A (en fonction du moteur)
- Réglage courant: 0,5 A – 1 A – 1,5 A – 2 A – 2,5 A – 2,8 A – 3 A et 3,5 A
- Puissance: 160 W
- Réglage pas: 1, 2/A – 2/B – 4 – 8 – 16 – 32
- Température: -10 à 45°C
- Poids: 0,2 kg
- Dimensions: 96 x 71 x 37 mm
- Référence DFRobot: DRI0043
Fournisseur : Gotronic
Schéma de câblage de principe :
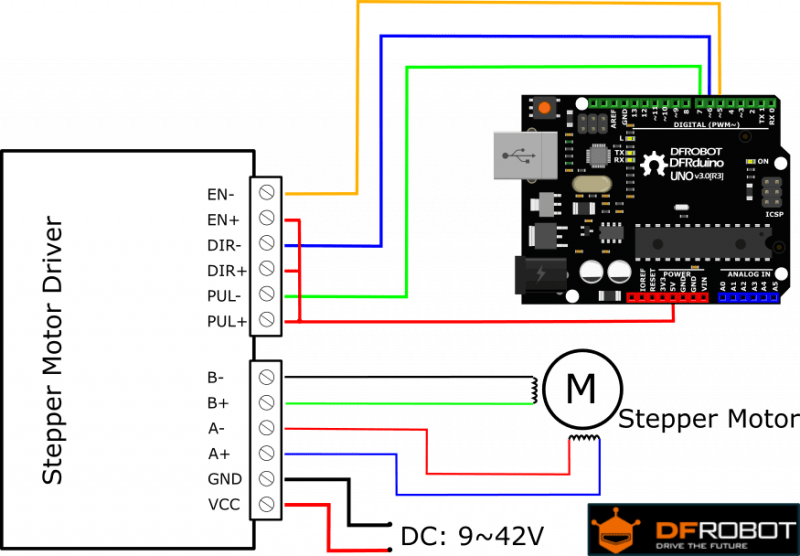
Schéma de câblage de principe , du driver DRI0043
.
![]()
Driver de moteur pas-à-pas DM432C |

Driver de moteur pas-à-pas DM432C
Le DM432C de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
Il convient pour les moteurs bipolaires ou unipolaires 6 fils (half coil ou full coil) de la série NEMA 14 à 23 et sa fonction multistep permet d’atteindre des résolutions très élevées.
A savoir:
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
- Plus d’information sur le Driver DM432C
- Moteur compatibles avec le driver DM432C
.
![]()
Driver de moteur pas-à-pas DM860 |

Le DM860 de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
- Plus d’information sur le Driver DM860
Quelques moteurs compatibles pour le Driver DM860
- Moteur 34HS31-5504S :Moteur pas-à-pas bipolaire de taille Nema 34 présentant un couple important de 4,5 Nm, une grande précision et des niveaux de vibrations et de bruits faibles.
- Nombre de pas: 200
- Angle par pas: 1,8°
- Alimentation: 2,2 V
- Résistance/phase: 0,4 ohms
- Courant/phase: 5,5 A
- Inductance/phase: 3,5 mH
- Couple de maintien: 45,8 kg.cm
- Connexion: 4 fils
- Dimensions de l’axe: Ø14 x 35 mm
- Dimensions: 81 x 81 x 79 mm
- Poids: 2,3 kg
- Moteur 57STH56R : Moteur pas-à-pas bipolaire de taille Nema 23 présentant un couple de 11,2 kg.cm. Il est équipé d’un axe arrière de 3,8 mm permettant le montage d’un encodeur.
- Nombre de pas: 400
- Angle par pas: 0,9°
- Alimentation recommandée: 12 V
- Résistance/phase: 900 mΩ
- Courant/phase: 2,8 A
- Couple de maintien: 12 kg.cm
- Couple: 11,2 kg.cm
- Connexion: 4 fils
- Dimensions de l’axe: Ø6,35 x 19 mm
- Dimensions de l’axe arrière: Ø3,8 x 13 mm
- Dimensions: 56 x 56 x 56 mm
.
Retour au sommaire.
![]()
Mise à jour le 15/02/2020 – Rubrique traitant du module led RGB 8 mm Grove , en particulier sur Arduino méga et nano . Nous traitons des 2 versions 104030006 / 104020048