
Mise à jour le 11/11/2021 : Cet article traite du changement du mode d’algorithme de la camera SEN0305 ou de la SEN0336 version pro Continuer la lecture
Archives de catégorie : ARDUINO
Mise à jour le 11/11/2021 : Dans cet article vous trouverez les caractéristiques principales du module AI HuskyLens Gravity SEN0305 avec utilisation de la reconnaissance faciale .
Sommaire :
- Présentation du module AI HuskyLens Gravity SEN0305
- Tuto sur la reconnaissance facial
- Schéma de principe pour le cablage entre la carte Arduino Uno et la carte SEN0305
- Programme de reconnaissance faciale, de suivis de visage et du mode patrouille
- Retour au menu de la caméra.
.
![]()
Présentation du module AI HuskyLens Gravity SEN0305 |
.
Le HuskyLens Gravity est un capteur visuel intelligent, économique, simple d’utilisation basé sur une caméra OV2640 associée à un afficheur 2″ IPS et à un processeur Kendryte K210.
Grâce au port UART / I2C, HuskyLens peut se connecter à Arduino et micro:bit pour vous aider à réaliser des projets très créatifs sans jouer avec des algorithmes complexes.
Spécification :
- Processeur : Kendryte K210
- Capteur d’images : Objectif Husky SEN0305 : OV2640 (appareil photo 2,0 mégapixels).
- Tension d’alimentation : 3,3 ~ 5,0 V
- Consommation : 320 mA à 3,3 V , 230 mA à 5,0 V (mode de reconnaissance faciale ; luminosité du rétroéclairage à 80 % ; lumière d’ appoint éteinte).
- Port de communication : UART ; I2C
- Affichage : écran IPS de 2,0 pouces avec une résolution de 320*240
- Algorithmes intégrés : reconnaissance faciale, suivi d’objets, reconnaissance d’objets, suivi de lignes, reconnaissance de couleurs, reconnaissance de balises, classification d’objets
- Dimensions : 52 mm x 44,5 mm (2,05 * 1,75 pouces)
Retour au sommaire
![]()
Tuto sur la reconnaissance facial |
.
.
Retour au sommaire![]()
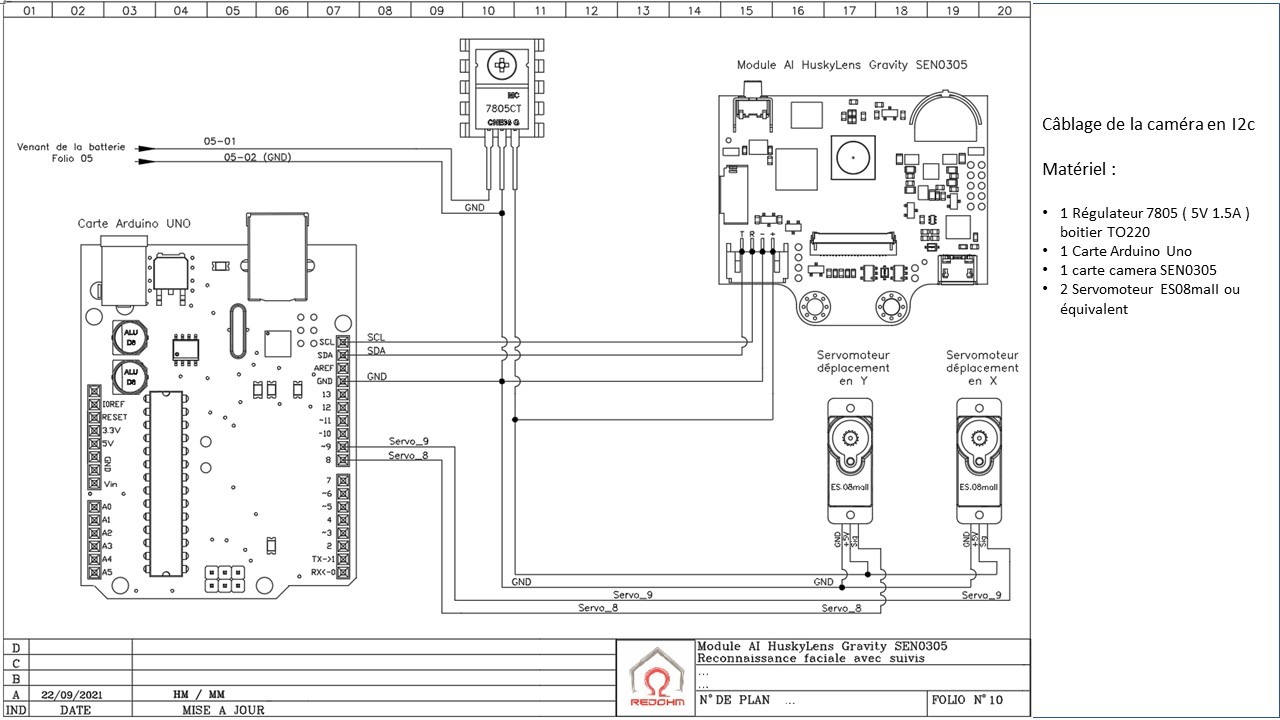
Schéma de principe pour le cablage entre la carte Arduino Uno et la carte SEN0305 |
.
.
Matériel :
- Régulateur 7805 en boitier TO2020
- https://www.gotronic.fr/art-l7805cv-1578.htm
- Module AI HuskyLens Gravity SEN0305
- https://www.gotronic.fr/art-module-ai-huskylens-gravity-sen0305-31965.htm
- https://fr.rs-online.com/
- code article : 204-9898
- Arduino UNO
- https://www.gotronic.fr/
- code article : 25950
- https://www.gotronic.fr/
![]()
Programme de reconnaissance faciale, de suivis de visage et du mode patrouille |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 |
// // // ********************************************* // // reconnaissance faciale // suivis de visage reconnu // mode patrouille // // Arduino avec la Camera Sen0305 // // // Code Modifié : Mazelin H // RedOhm // Le 01/09/2021 // ********************************************* // À utiliser pour déterminer s'il s'agit d'une flèche ou d'un bloc // -> COMMAND_RETURN_BLOCK : C'est un bloc // -> COMMAND_RETURN_ARROW : C'est une flèche // // Pour un bloc : // xCenter : X Centre du bloc // yCenter : Centre Y du bloc // width : Largeur du bloc // height : Hauteur du bloc #include <Servo.h> #include "HUSKYLENS.h" HUSKYLENS huskylens; void printResult(HUSKYLENSResult result); // Variable de passage int passage_setup = 0 ; // Crée un objet de type "Servo_X", nommé -> Servo_X Servo servo_x; Servo servo_y; int position_x = 90 ; int position_y = 90 ; // variable pour le calcul de l'erreur de positionnement en x int erreur_x; // Variable pour La grandeur réglante en x. La valeur réglante est la grandeur de // commande qui a été choisie pour contrôler la grandeur réglée int valeur_reglante_x; // variable pour le calcul de l'erreur de positionnement en y int erreur_y; // Variable pour La grandeur réglante en y. La valeur réglante est la grandeur de // commande qui a été choisie pour contrôler la grandeur réglée int valeur_reglante_y; // position du mode patrouille int pos ; // ********************************************************************** // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécutée une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // ********************************************************************** void setup() { // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. Serial.begin(115200); // on attent que le port de communication soit pret while (!Serial) { ; } // communication i2c Wire.begin(); while (!huskylens.begin(Wire)) { Serial.println(F("Échec du démarrage!")); Serial.println(F("1.Veuillez revérifier le \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>I2C)")); Serial.println(F("2.Veuillez revérifier la connexion.")); delay(100); } // associe le servomoteur x à la broche 9 servo_x.attach(9); // associe le servomoteur y à la broche 9 servo_y.attach(8); delay(15); // Positionne mes servomteurs à 90 (phase d'initialisation) servo_x.write(position_x); servo_y.write(position_y); // Réalise une pause dans l'exécution du programme pour une durée // de 50 millisecondes // permettant au servomoteur d'atteindre sa position delay(50); } // ********************************************************************** // Le programme principal s’exécute par une boucle infinie appelée Loop () // ********************************************************************** void loop() { // verifie la connexion if (!huskylens.request()) { Serial.println(F("Échec de la demande de données à HUSKYLENS, revérifiez la connexion!")); } // controle si le module possède des enregistrements else if(!huskylens.isLearned()) { Serial.println(F("Je suis desolé il faut appuyer sur le bouton d'apprentissage ")); } // on verifie si le systeme ne detecte rien dans son champs de vision else if(!huskylens.available()) { Serial.println(F("Aucun bloc ou flèche n'apparaît à l'écran! Oryon ne detecte rien ")); // mise en service du mode patrouille // pour la recherche d'un visage // x < y (position_x est inferieur à y) if (( position_x < 170)&&( pos == 0)) { position_x = position_x +1; servo_x.write(position_x); } else if (( position_x < 171)&&(position_x > 10)) { pos = 1 ; position_x = position_x -1; servo_x.write(position_x); } else if (position_x <= 10) { pos=0; } delay(20); Serial.println (position_x); } else { Serial.println(F("###########")); while (huskylens.available()) { HUSKYLENSResult result = huskylens.read(); printResult(result); } } } // void printResult(HUSKYLENSResult result){ if (result.command == COMMAND_RETURN_BLOCK){ Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID); // Deplacement de la camera sur horizontal cote droit // // x > y (result.xCenter est supérieur à y) if (result.xCenter > 165) { // calcul de l'erreur de positionnement erreur_x = result.xCenter - 165 ; // valeur_reglante valeur_reglante_x= map(erreur_x,1,50,1,5); position_x =position_x+valeur_reglante_x ; servo_x.write(position_x); } // Deplacement de la camera sur horizontal cote gauche // else if ( result.xCenter < 155) { // calcul de l'erreur de positionnement erreur_x = 155 - result.xCenter ; // valeur_reglante // map -> Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette // map (valeur, limite_basse_source, limite_haute_source, limite_basse_destination, limite_haute_destination) valeur_reglante_x= map(erreur_x,1,50,1,5); position_x = position_x - valeur_reglante_x ; servo_x.write(position_x); } else if ((result.xCenter > 165)&&( result.xCenter < 155)) { servo_x.write(position_x); } // si la camera est trop haut if (result.yCenter < 115) { // calcul de l'erreur de positionnement erreur_y = 115-result.yCenter ; // valeur_reglante valeur_reglante_y= map(erreur_y,1,50,1,5); position_y = position_y + valeur_reglante_y ; servo_y.write(position_y); } // si la camera est trop basse else if ( result.yCenter > 125) { // calcul de l'erreur de positionnement pour la camera trop basse erreur_y = result.yCenter -125 ; // valeur_reglante valeur_reglante_y= map(erreur_y,1,50,1,5); position_y = position_y -valeur_reglante_y ; servo_y.write(position_y); } // Temporisation de stabilité delay (100); // affectation du resultat a un prenom ( a une personne ) if (result.ID == 1 ) { Serial.println ("Bonjour Louis"); } else if (result.ID == 2 ) { Serial.println ("Bonjour Timeo"); } else if (result.ID == 3 ) { Serial.println ("Bonjour au grand maitre "); } else if (result.ID == 4 ) { Serial.println ("Salut Johann "); } else if (result.ID == 5 ) { Serial.println ("Bonjour Marie"); } } else if (result.command == COMMAND_RETURN_ARROW){ Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID); } else{ Serial.println("Objet inconnu!"); } } |
.
Retour au sommaire
.
Mise à jour le 14/06/2021 : La librairie SD sur Arduino permet de créer un fichier sur une carte SD , de lire et d’écrire ce même fichier .
 Comment stocker des valeurs de plusieurs Octets
Comment stocker des valeurs de plusieurs Octets
Mise à jour le 28/09/2021 : Comment traiter le stockage d’informations en mémoire EEPROM sur arduino avec l’instruction EEPROM.put.
Sommaire :
- But du tutoriel
- Principe de capture et d’ecriture
- Vidéo sur l’ecriture de la mémoire EEPROM
- Programme pour l’écriture et la lecture de la mémoire EEPROM
- Pour tout probléme
- Retour au menu principal
.
But du tutoriel |
.
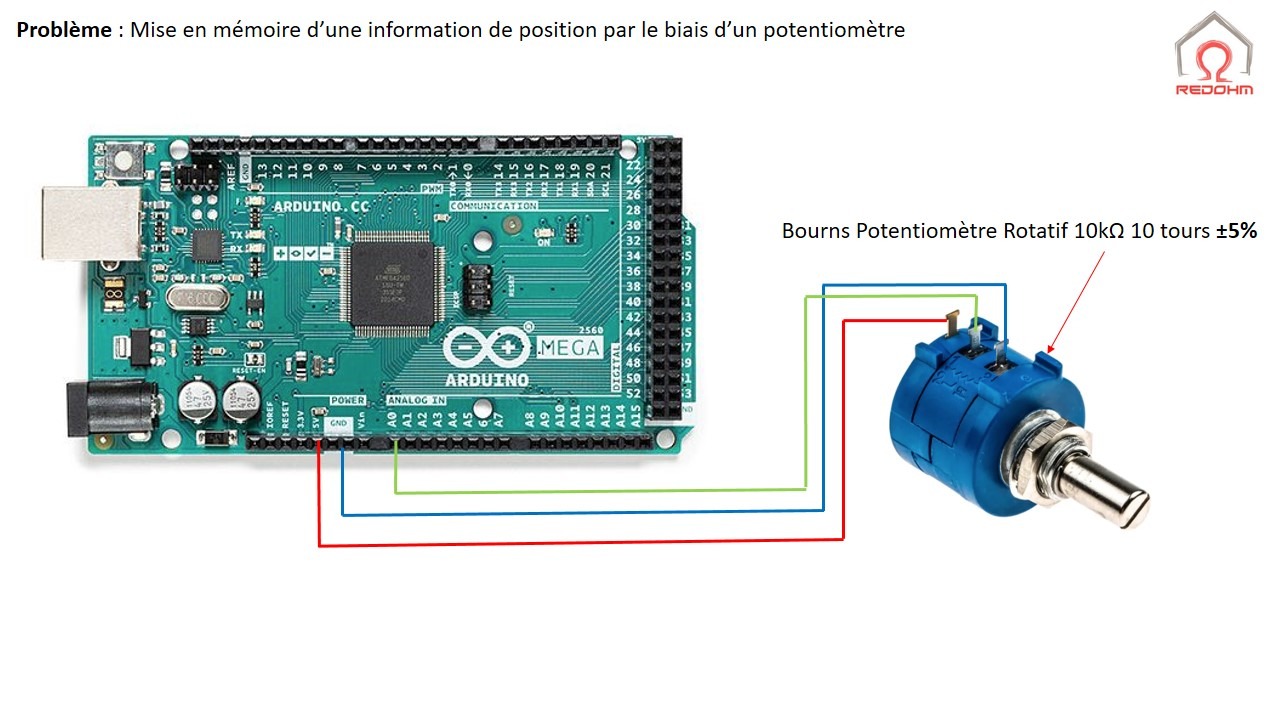
Dans le cadre du projet Oryon nous avons une partie programmation pour le système d’apprentissage du cobot. Le principe de l’apprentissage et d’enseigner au cobot les mouvements que l’on souhaite qu’il réalise en le manipulant simplement, et d’enregistrer des différents mouvements dans une mémoire afin qu’il nous les restitue quand on lui demande
Pour que l’on utilise le mode d’apprentissage il faut déjà ecrire un programme qui nous permettra que ce mode nous retranscrive automatiquement les déplacements de celui-ci. Voici un petit programme qui nous permet déjà d’avoir un petit aperçu de ce mode de stockage. La difficulté sur arduino étend de récupérer les valeurs du convertisseur 10 bits et de stocker la valeur des 2 octets en une seule fois dans la mémoire.
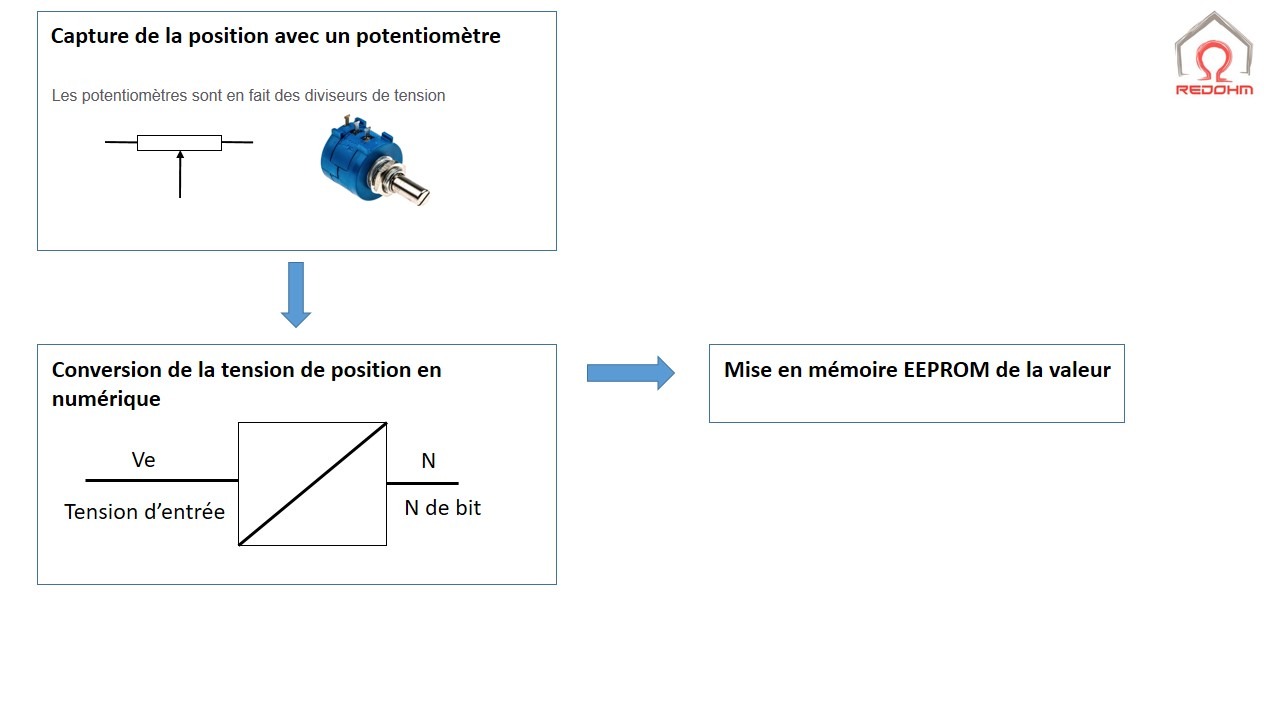
Le but de cet exemple est de montrer aussi l’instruction EEPROM.put() qui écrit des données sur EEPROM ou en utilisant également EEPROM.update() qui écrit des données uniquement si elles sont différentes du contenu précédent des emplacements à écrire. Le nombre d’octets écrits est lié au type de données ou à la structure personnalisée de la variable à écrire.
.
Retour au sommaire
Principe de capture et d’ecriture en EEPROM de plusieurs octets |
.
.
.
Retour au sommaire.
Video sur l’ecriture de la mémoire EEPROM |
.
.
Retour au sommaire.
.
Programme pour l’ecriture et la lecture en EEPROM de plusieurs octets |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 |
// // //****************************************************** // //But : Lecture d'une valeur de 10 bits et enregistrement // de celle-ci en memoire EEPROM // // Par H-Mazelin // RedOhm // Le 26/05/2021 //****************************************************** #include <EEPROM.h> // le potentiomètre, branché sur la broche analogique 6 int potentiometre1 = 6; //int address = 0 ; int valeur_eeprom ; // ************************************************************* // Declaration des entrees et des sorties pour l'enregistrement const int Led_enregistrement = 25 ; // déclaration de l'entrée du bouton branché sur la broche 15 // de votre carte Arduino int bouton15 = 15; // variable du type int pour stocker les valeurs de passage du bouton15 int bouton15v; // ************************************************************* // Declaration des entrees et des sorties la lecture const int Led_lecture = 26; // déclaration de l'entrée du bouton branché sur la broche 16 // de votre carte Arduino int bouton16 = 16; // variable du type int pour stocker les valeurs de passage du bouton16 int bouton16v; void setup() { //**************************************** //Mise en service du port de com //**************************************** //ouvre le port série et fixe le debit de communication à 9600 bauds Serial.begin(9600); // on attent que le port de communication soit pret while (!Serial) { ; } //**************************************** //Configuration des entrees pour les boutons de selection //**************************************** pinMode (bouton15,INPUT ); pinMode (bouton16,INPUT ); //**************************************** //Configuration des sorties pour les Led //**************************************** pinMode (Led_enregistrement,OUTPUT ); pinMode (Led_lecture,OUTPUT ); } void loop() { // **************************************************** // creation de la commande enregistrement // **************************************************** bouton15v = digitalRead(bouton15); if (bouton15v == 1) { digitalWrite (Led_enregistrement,HIGH); // appel de la fonction -> lecture de la position du servomoteur lecture_position(); } else if (bouton15v == 0) { digitalWrite (Led_enregistrement,LOW); } // **************************************************** // creation de la commande de lecture // **************************************************** bouton16v = digitalRead(bouton16); if (bouton16v == 1) { digitalWrite (Led_lecture,HIGH); // appel de la fonction -> lecture de la memoire lecture_memoire_et_pilotage_servomoteur(); } else if (bouton16v == 0) { digitalWrite (Led_lecture,LOW); } } // Creation de la fonction lecture_position // //******************************************************* // Lecture des positions du servomoteur et enregistrement //******************************************************* // void lecture_position() { Serial.println(" Attention lecture de la position et ecriture de la memoire dans 5 secondes : "); delay (5000); Serial.print (""); Serial.println("c'est parti"); for (int i=0 ; i <= 32 ; i=i+2) { // conversion de la tension de la borne 6 et transfert de la valeur // numerique dans la variable valeur_eeprom valeur_eeprom=analogRead(potentiometre1); delay(20); Serial.print("ecriture a l'adresse : ");Serial.print(i); Serial.print(" de la valeur => ");Serial.println(valeur_eeprom); // EEPROM.put permet d'ecrire n'importe quel type de données ou objet dans l'EEPROM. // la valeur de i permet de pointer l'adresse pour stocker la valeur EEPROM.put (i,valeur_eeprom); delay(200); } bouton15v == 0; Serial.println("Fin d'enregistrement"); delay(2000); } //******************************** // Lecture de la memoire EEPROM //******************************** // // Creation de la fonction lecture_memoire_et_pilotage_servomoteur void lecture_memoire_et_pilotage_servomoteur() { Serial.println(""); Serial.println(" Attention lecture de la memoire EEPROM dans 5 secondes"); delay (5000); for (int i=0 ; i <= 32 ; i=i+2) { // lire un octet à partir de l'adresse specifie dans la variable i EEPROM. get ( i , valeur_eeprom ) ; delay (100); Serial.print(i); Serial.print("\t"); Serial.print(valeur_eeprom); Serial.println(); } delay(500); bouton16v == 0; Serial.println("Fin de lecture "); } |
.
Retour au sommaire
Pour tout probléme |
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire
.
Mise à jour le 25/04/2020 – Rubrique traitant de la carte Arduino Nano 33 BLE ABX00034-R sur les caractéristiques techniques , trucs et astuces , exemple de programme etc …
Mise à jour le 08/03/2020 : Explications et applications de la boucle while et do-while, dans le fonctionnement et la validation d’un bouton poussoir pour continuer l’exécution d’un programme
Mise à jour le 20/09/2020 : Le traceur série nous permet d’afficher une ou plusieurs courbes en même temps façon oscilloscope.Nous apprendrons aussi à réaliser un chronogramme temporel en créant un offset
 Arduino tutoriel : La mémoire EEPROM
Arduino tutoriel : La mémoire EEPROM
Mise à jour le 18/11/2021 : Le but de ces tutoriels doivent vous permettre de vous familiarisez avec le stokage de données dans la mémoire EEPROM de votre carte Arduino
Mise à jour le 07/01/2020 : Dans cet article vous trouverez les caractéristiques principales de la carte Arduino Uno WiFi , ainsi que les cartes additives de différents constructeurs pour son utilisation .
–
Mise à jour le 13/10/2017 .Dans cet article, nous allons non seulement étudier le fonctionnement d’un chenillard, mais aussi la création de fonctions. Alors ! Une fonction c’est quoi ? Une fonction c’est ce qu’on pourrait également désigner sous le nom d’une procédure, de sous-programme ou d’une sous routine, c’est un ensemble d’instructions que l’on peut appeler dans n’importe quelle partie du programme principal. Dans cet article ,vous aurez la liste du matériel correspondant, un tutoriel vidéo pour vous guider dans la programmation, ainsi que le listing du programme d’origine.
Sommaire :
- Matériel utile pour ce tutoriel.
- Programme du chenillard avec information sur le moniteur
Un tutoriel vidéo est en cours ainsi qu’un schéma électrique
Matériel utile pour le tutoriel étude d’un chenillard |
Liste du materiel :
1 pièces : Module bouton poussoir Grove 101020003 ou bouton poussoir 111020000ou interrupteur Grove 101020004 .
Distributeur : Gotronic
1 pièces : Potentiomètre à glissière Grove 101020036 .Ce module potentiomètre compatible Grove délivre un signal analogique et est équipé d’une résistance de 10 kΩ idéale pour une utilisation avec les cartes Arduino ou compatibles.
Potentiomètre à glissière Grove 101020036 . Pour la vitesse de défilement du chenillard
Distributeur : Gotronic / Lextronic
1 pièce : Carte Arduino MEGA 2560 . La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs. Elle est idéale pour des applications exigeant des caractéristiques plus complètes que la Uno. Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires.
Distributeur : Gotronic / Lextronic
1 pièce : Module Grove Mega Shield V1.2 103020027 . Le module Grove Mega Shield de Seeedstudio est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega. Il est compatible notamment avec les cartes Arduino Mega et Google ADK.
Module Grove Mega Shield V1.2 103020027 ( interface pour le chenillard utile mais pas obligatoire )
Distributeur : Gotronic
1 pièce :Le Relais 5 V à 8 Canaux est un module 5 V de relais à 8 canaux. Il peut être contrôlé directement par une large gamme de microcontrôleurs, comme Arduino, AVR, PIC, ARM et MSP430. Ce module comporte 8 relais avec des ports « NC » (normalement connecté à COM) et « NO » (normalement ouvert à COM). Ce module est également équipé de 8 LED qui montrent l’état des relais.
Relais 5V à 8 Canaux – Sorites pour le chenillard
Distributeur : Roboshop
Programme du chenillard avec information sur le moniteur |
Programme : Version du 10/10/2017
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 |
// // // ***************************************************** // * RedOhm * // * * // * * // * * // * CHENILLARD 8 SORTIES A RELAIS * // * * // * Utilisation des fonctions: * // * analogRead / map / digitalRead * // * * // * creation de fonctions (sous programme) * // * * // * 10/10/2017 * // * H.Mazelin * // ***************************************************** // Rappel sur la fonction d'une variable // // On peut définir une variable comme une boite ou l’on stock des // balles .Une variable est une boite ou l’on stock un nombre , // et comme il existe une multitude de nombres: // Exemple entiers ,décimaux etc …Il faut donc assigner un type à cette // variable // déclaration de l'entrée du bouton12 branché sur la broche 12 // de votre carte Arduino // bouton servant au demarrage des sequences du chenillard int bouton12 = 12; // déclaration des relais branchés sur les broches // de votre carte Arduino int relais1 = 11; int relais2 = 2; int relais3 = 3; int relais4 = 4; int relais5 = 5; int relais6 = 6; int relais7 = 7; int relais8 = 8; // variable du type int pour stocker la valeur de passage du bouton2 int bouton2v; // variable du type int pour stocker la valeur de clignotement int variable ; // déclaration de l'entrée analogique // ou se trouve le module potentiometre Grove int potar_pin = 2; // -------------------------------------------------------------------- // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // -------------------------------------------------------------------- void setup() { // ***************************************************** // Presentation du programme // // ***************************************************** // initialise le port de communication // et fixe la vitesse a 9600 bauds Serial.begin(9600); // affiche les differents messages sur l'ecran du pc Serial.println(" "); Serial.println("*************************"); Serial.println(" Programme le chenillard "); Serial.println(" realiser par "); Serial.println(" H-Mazelin "); Serial.println(" "); Serial.println("*************************"); Serial.println(" "); // on fait une pause du programme pendant 2000ms , soit 2 secondes delay(2000); // Affiche le message suivant => Appuyer sur le bouton pour demarrer le chenillard Serial.println("Appuyer sur le bouton pour demarrer le chenillard "); // Configure la broche spécifiée pour qu'elle se comporte soit en entrée, // soit en sortie.Dans notre cas en entrée pour le bouton2 pinMode(bouton12,INPUT); // Configure la broche spécifiée pour qu'elle se comporte soit en entrée, // soit en sortie.Dans notre cas en sortie pour l'ensemble des relais pinMode(relais1,OUTPUT); pinMode(relais2,OUTPUT); pinMode(relais3,OUTPUT); pinMode(relais4,OUTPUT); pinMode(relais5,OUTPUT); pinMode(relais6,OUTPUT); pinMode(relais7,OUTPUT); pinMode(relais8,OUTPUT); } // ---------------------------------------------------------------------- // Le programme principal s’exécute par une boucle infinie appelée Loop () // ---------------------------------------------------------------------- void loop() { // lis la valeur de la tension analogique présente sur la broche 2 // et introduit le resultat dans la variable "variable" variable = analogRead(potar_pin); // la valeur du potentiometre est comprise entre 0 et 1023 // Etalonnage de la valeur du potentiometre en valeur de temps // valeur de temps comprise de 50 a 1200 milliseconde // pour cela on utilise la fonction Map // map (variable ,valeur basse de depart,valeur haute de depart ,new valeur basse, new valeur haute ) // valeur basse de depart = 1 // valeur haute de depart = 1023 // new valeur basse = 100 // new valeur haute = 1200 variable =map( variable ,1,1023,100,1200); // lis l'état de la broche en entrée bouton2 // et met le résultat dans la variable bouton2v bouton2v = digitalRead(bouton12); // On realise le test suivant // si le bouton12 = 1 // alors on execute l'operation suivante -> demarrage du chenillard if (bouton2v == HIGH ) { // Appel de la fonction -> affichage_progressif() Serial.println ("Envoie de la sequence affichage -> progressif"); affichage_progressif(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_10101010() Serial.println ("Envoie de la sequence affichage -> sequence_10101010"); sequence_10101010(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_retour_au_centre() Serial.println ("Envoie de la sequence affichage -> sequence_retour_au_centre"); sequence_retour_au_centre(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_retour_au_centre() Serial.println ("Envoie de la sequence affichage -> sequence_retour_au_centre"); sequence_retour_au_centre(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_cylon1() Serial.println ("Envoie de la sequence affichage -> sequence_cylon1"); sequence_cylon1(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); // Appel de la fonction -> sequence_cylon() Serial.println ("Envoie de la sequence affichage -> sequence_cylon"); sequence_cylon(); // Appel de la fonction -> mise_a_zero() mise_a_zero(); Serial.println (" "); } // sinon on maintient le relais au niveau bas else { // Appel de la fonction -> mise_a_zero() mise_a_zero(); } } // ******************************************************** // la creation de la fonction -> // affichage_progressif // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void affichage_progressif() { // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais2 // ce qui active le relais digitalWrite(relais2, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais8 // ce qui active le relais digitalWrite(relais8, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // mise_a_zero // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* // écrit la valeur LOW (=0) sur la broche des relais // ce qui desactive l'ensemble des relais void mise_a_zero() { digitalWrite(relais1, LOW); digitalWrite(relais2, LOW); digitalWrite(relais3, LOW); digitalWrite(relais4, LOW); digitalWrite(relais5, LOW); digitalWrite(relais6, LOW); digitalWrite(relais7, LOW); digitalWrite(relais8, LOW); } // ******************************************************** // la creation de la fonction -> // sequence_10101010 // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_10101010() { // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_retour_au_centre // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_retour_au_centre() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 8 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais8, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2, HIGH); digitalWrite(relais7, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais3 et 6 // ce qui active les relais digitalWrite(relais3, HIGH); digitalWrite(relais6, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais4 et 5 // ce qui active les relais digitalWrite(relais4, HIGH); digitalWrite(relais5, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_cylon // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_cylon() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 8 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais8, HIGH); // écrit la valeur LOW (=0) sur la broche des relais2 et 7 // ce qui desactive les relais digitalWrite(relais2,LOW); digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2,HIGH); digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche du relais1 et 8 // ce qui desactive les relais digitalWrite(relais1,LOW); digitalWrite(relais8,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais3 et 6 // ce qui active les relais digitalWrite(relais3,HIGH); digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche des relais2 et 7 // ce qui desactive les relais digitalWrite(relais2,LOW); digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais4 et 5 // ce qui active les relais digitalWrite(relais4,HIGH); digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche des relais3 et 6 // ce qui desactive les relais digitalWrite(relais3,LOW); digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche des relais2 et 7 // ce qui active les relais digitalWrite(relais2,HIGH); digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche des relais4 et 5 // ce qui desactive les relais digitalWrite(relais4,LOW); digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } // ******************************************************** // la creation de la fonction -> // sequence_cylon1 // // a savoir : la creation d'une fonction est independante // du programme principal. // Elle sera donc en dehors du programme principal // ******************************************************* void sequence_cylon1() { // écrit la valeur HIGH (=1) sur la broche des relais1 et 2 // ce qui active les relais digitalWrite(relais1, HIGH); digitalWrite(relais2, HIGH); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3,HIGH); // écrit la valeur LOW (=0) sur la broche du relais1 // ce qui desactive le relais digitalWrite(relais1,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4,HIGH); // écrit la valeur LOW (=0) sur la broche du relais2 // ce qui desactive le relais digitalWrite(relais2,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche du relais3 // ce qui desactive le relais digitalWrite(relais3,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche du relais4 // ce qui desactive le relais digitalWrite(relais4,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais7 // ce qui active le relais digitalWrite(relais7,HIGH); // écrit la valeur LOW (=0) sur la broche du relais5 // ce qui desactive le relais digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais8 // ce qui active le relais digitalWrite(relais8,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais6 // ce qui active le relais digitalWrite(relais6,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais8,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais5 // ce qui active le relais digitalWrite(relais5,HIGH); // écrit la valeur LOW (=0) sur la broche du relais7 // ce qui desactive le relais digitalWrite(relais7,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais4 // ce qui active le relais digitalWrite(relais4,HIGH); // écrit la valeur LOW (=0) sur la broche du relais6 // ce qui desactive le relais digitalWrite(relais6,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais3 // ce qui active le relais digitalWrite(relais3,HIGH); // écrit la valeur LOW (=0) sur la broche du relais5 // ce qui desactive le relais digitalWrite(relais5,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais2 // ce qui active le relais digitalWrite(relais2,HIGH); // écrit la valeur LOW (=0) sur la broche du relais4 // ce qui desactive le relais digitalWrite(relais4,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); // écrit la valeur HIGH (=1) sur la broche du relais1 // ce qui active le relais digitalWrite(relais1,HIGH); // écrit la valeur LOW (=0) sur la broche du relais3 // ce qui desactive le relais digitalWrite(relais3,LOW); // Réalise une pause dans l'exécution du programme pour une durée // de valeur de notre variable delay(variable); } |