***
Mise à jour le 24/05/2015
Voici l’étude du capotage du thorax de Sentinel, celui-ci abritera les différentes cartes électroniques qui piloteront la rotation de la tête des bras ainsi que différents capteurs .

Mise à jour le 24/05/2015
Voici l’étude du capotage du thorax de Sentinel, celui-ci abritera les différentes cartes électroniques qui piloteront la rotation de la tête des bras ainsi que différents capteurs .
Mise à jour 09/02/2015
Alimentation: 6 à 9 Vcc via le connecteur alimentation
Consommation: 200 mA
Mémoire Flash de 4 Mb pour le stockage d’images
Rétro-éclairage par led
Contraste: 500:1
Dimensions: 77 x 77 x 20 mm
Compatible avec la carte Arduino Uno R3
Microcontrôleur: ATMega328P
E/S digitales: 14 dont 6 PWM
Entrées analogiques: 6
Mémoire:
– Flash: 32 k
– SRAM: 2 k
– EEPROM: 1 k
Microcontrôleur 16 bits
Contrôleur LCD RGB
Mémoire de stockage de 256 k
Résolution: 320 x 240 pixels
65536 couleurs
Ecran tactile résistif
Assurez-vous que vous avez la dernière version IDE Arduino .
Ci-joint le lien : http://www.arduino.cc/
Avant de commencer, effectuer le téléchargement des fichiers et Installer les pilotes de votre arLCD
Ci-joint le lien : http://www.earthlcd.com/
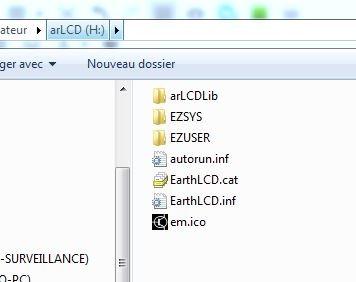
Branchez la carte écran « arLCD » dans un port USB libre et attendez quelques secondes. Windows reconnaît le nouveau matériel et l’affiche dans votre gestionnaire de disque. L’utilitaire arLCD a construit un disque Flash de 4 MO qui sera installé automatiquement à l’aide d’un pilote intégré Windows. Vous devez installer le driver EarthMake se trouvant sur votre carte afficheur ou sur le site du constructeur.
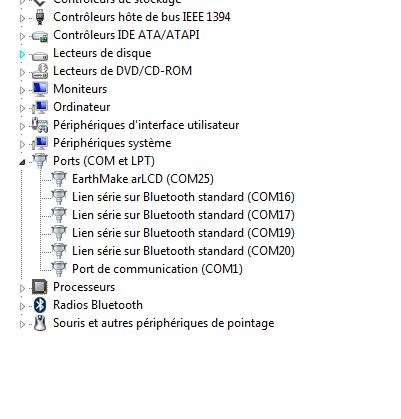
Après avoir branché le ARLCD et installé avec succès le driver, un port COM sera disponible.
Ce port COM sera affiché dans le gestionnaire de périphériques, sous ports, vous verrez divers dispositifs tels que :
Afin de tirer le meilleur parti de votre arLCD, il est recommandé de mettre à jour le système de fichiers. Vous avez peut-être déjà téléchargé le dernier système de fichiers à l’étape 1. Ouvrez le fichier zip nommé : « ArLCD_Filesystem_ {date} .zip » et copier l’ensemble des fichiers dans le répertoire racine de votre arLCD. Lorsque Windows vous demande d’écraser les fichiers existants, cliquez sur oui. Redémarrez le arLCD ou appuyer sur le bouton reset de votre carte.
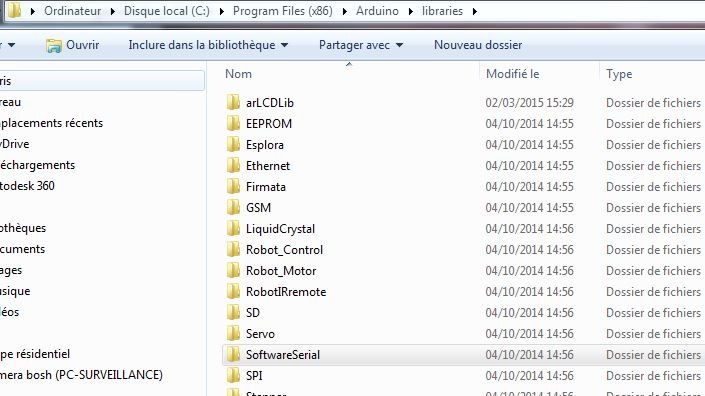
La carte arLCD est livré avec une bibliothèque pour être utilisé avec l’Arduino IDE, ce qui rend la programmation de l’afficheur très facile. Dans le fichier nommé arLCD_Library_{date}.zip que vous avez téléchargé plutôt. Vous trouverez un dossier nommé ezLCD. Ce dossier contient les fichiers de la bibliothèque et un exemple de programmation. Localisez le dossier de l’Arduino IDE sur votre ordinateur et copier le dossier ezLCD dans le dossier des bibliothèques .
Avant de communiquer avec votre afficheur arLCD, vous devez vérifier que le fichier startup.ezm doit être correctement configuré. Si un startup.ezm est dans le EZUSER \ Macros \ alors il sera utilisé. Sinon, il utilisera le startup.ezm dans le EZSYS \ Macros \ répertoire. Vous pouvez ouvrir ce fichier avec le bloc note de Windows 7 ou 8. Ouvrez le fichier startup et vérifiez si les lignes ci-dessous sont présentes dans celui-ci.
print « Arduino Mode CMD 38400 Baud »
cfgio 3 serial2_rx 38400 n81
cfgio 4 serial2_tx 38400 n81
cmd serial2
‘setup usb bridge to program arduino
CFGIO 2 serial1_tx 57600 n81
CFGIO 6 serial1_rx 57600 n81
CFGIO 7 USB_DTR
bridge USBserial1
‘extra options
cfgio 9 touch_int low quiet
Si vous deviez changer quelque chose, appuyez sur le bouton de réinitialisation à l’arrière de l’écran pour redémarrer le arLCD.
Remarque: Le arLCD utilise le GPU pour programmer l’Arduino via le port USB
EN COURS DE REALISATION
![]()
***
Mise à jour le 11/02/2015
RedOhm palonnier Imnoov
 Imprimez vos pièces en 3D suivant votre finition désirée, en fonction de votre choix vous aurez plus ou moins de travail à fournir.
Imprimez vos pièces en 3D suivant votre finition désirée, en fonction de votre choix vous aurez plus ou moins de travail à fournir.
Une fois la pièce imprimée, il vous faudra enlever le surplus de matière dans les trous prévus aux écrous ainsi qu’à la rainure destinée à recevoir la corde (tendons)
Le fichier à télécharger pour l’imprimante 3D est disponible ci-dessous
Si toutefois vous voulez modifier quand même cette pièce, nous vous joignons le fichier compatible SolidWorks version 2014 .Le fichier à télécharger est disponible ci-dessous .

Il faudra aussi utiliser un foret de 8 mm pour agrandir le trou central
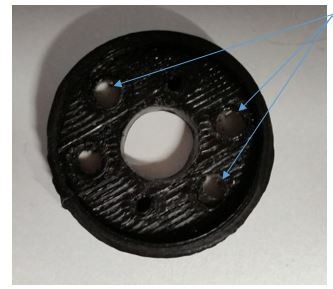
Perçage
Pour un centrage plus facile des vis de fixation, je vous conseille de repercer les trous des écrous avec un foret de 3mm
Utiliser un foret de 2 mm pour nettoyer l’intérieur du trou traversant situé ici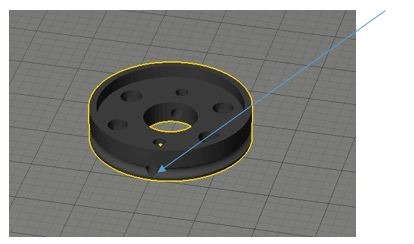
Ce conduit sert au passage du fil (tendons)
La prochaine étape consiste à mettre en place les écrous M3. Il vous faut pour cela un fer à souder pouvant atteindre 300°C et procéder de la manière suivante :
1 – Allumez le fer à souder
2 – Mettre l’écrou au bout de celui-ci

3 – attendre 5/10 secondes que l’écrou chauffe et ainsi faciliter l’insertion
4 – Alignez l’écrou et la pièce, appuyer légèrement pour que l’écrou rentre très facilement, mais surtout, alignez-le pour faciliter et garder la vis droite.
5 – Répétez l’opération pour les trois autres écrous .
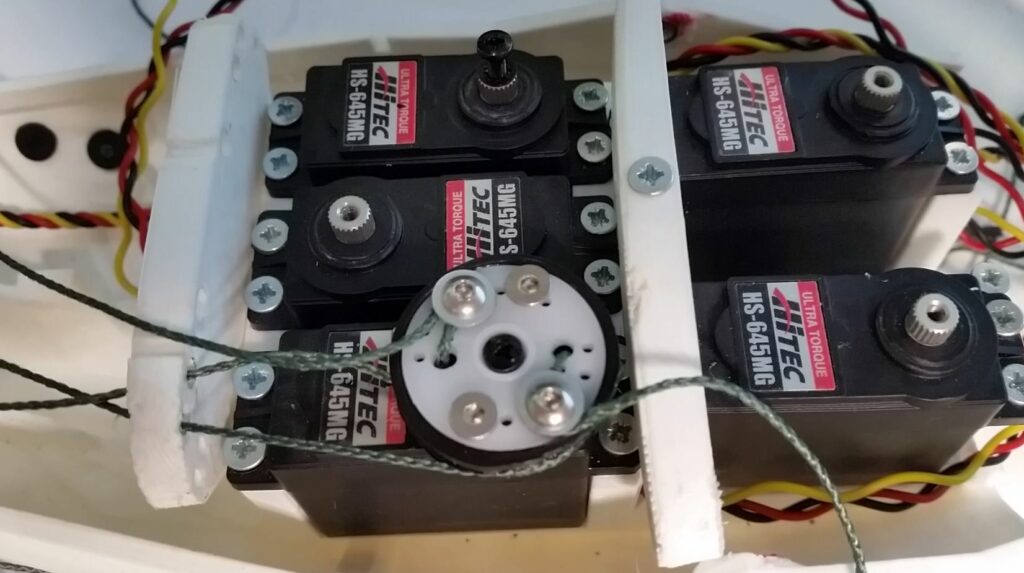
Passons aux palonniers du servomoteur Hitec HS-645MG. Il vous faudra l’insérer de manière à ce qu’il ne dépasse plus à l’intérieur.

Il faut insérer le palonnier blanc sur le palonnier noir de votre fabrication, visser l’ensemble en prenant soin d’agrandir les trous de fixations ( essayer de tomber sur ceux existants ). Allez-y doucement, il ne faut pas transpercer la pièce noire, il s’agit juste de percer la pièce blanche.

Voilà le résultat avec les vis mise en place. Repercez aussi le trou passe fil sans toutefois transpercer la pièce, percez juste la pièce blanche, utiliser un foret de 3mm


Mettre les fils en place, regarder la photo n° 18. Procédez de cette manière

Photo n°18

Et pour le serrage, procédez comme sur la photo
Il vous suffit ensuite de serrer la vis pour bloquer votre réglage et ainsi dire adieu aux longues minutes passées à défaire les nœuds.
La mise en place sur le servomoteur se fait à l’aide de la vis de celui-ci, ne la serrez pas au maximum , elle risque de bloquer votre servomoteur.

![]()
Nous vous présentons l’album photos du montage des yeux et du cou de Sentinel avec intégration dans la tête .L’ensemble a été imprimé sur une Replicator 2 en filament PLA de 1.75 mm a 216 degrés de chez Verbatim, ces photos font ressortir la facilité d’assemblage de la boite crânienne , du mécanisme des yeux ainsi que l’assemblage du cou et support cou .Soit une notice de montage de 70 photos .
Outillage nécessaire
Temps de montage nécessaire : 1h30
Dossier technique pour l’impression 3d ci-dessous
![]()




















![]()
***

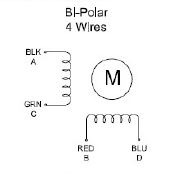
Moteur pas-à-pas bipolaire
– Moteur pas-à-pas bipolaire de taille Nema 34 présentant un couple important de 4,5 Nm, une grande précision et des niveaux de vibrations et de bruits faibles.
Brochage du moteur :
Fil jaune = A
Fil rouge = B
Fil vert = C
Fil bleu = D
Nombre de pas: 200
Angle par pas: 1,8°
Alimentation: 2,2 V
Résistance/phase: 0,4 ohms
Courant/phase: 5,5 A
Inductance/phase: 3,5 mH
Couple de maintien: 45,8 kg.cm
Connexion: 4 fils
Dimensions de l’axe: Ø14 x 35 mm
Dimensions: 81 x 81 x 79 mm
Poids: 2,3 kg
![]()
***
Mise à jour du 18/01/2015
Nous vous présentons 4 vidéo en 3D du montage de la tête , du cou et de l’articulation de Sentinel .
Etape 1 : Montage du cou
Etape 2 : Montage du cou dans le corps de cou
Etape 3 : Montage de l’ensemble de la tête avec vue sur le servomoteur
Etape 4 : Montage de l’ensemble tête , cou et articulation
![]()
**
Mise à jour le 15/01/2015
Nous vous présentons l’album photos en 3D du montage de la tête , du cou et de l’articulation de Sentinel .















Mise à jour du 19/01/2015
Rappel : Documentation sur le matériel utile dans nos réalisations.
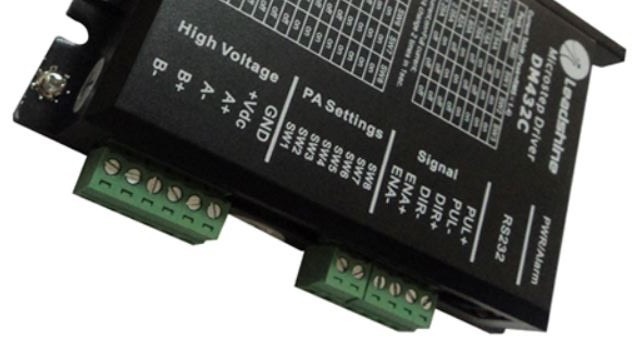
Le DM432C de Leadshine est un driver digital de moteurs pas-a-pas base sur un circuit DSP. Il fait partie de la dernière génération de contrôleurs de moteurs pas-a-pas et apporte un niveau unique de fluidité de mouvement, procure un couple optimum et une bonne stabilité. Les moteurs peuvent fonctionner plus silencieusement, avec moins d’échauffement et un mouvement plus régulier qu’avec les drivers classiques. Ses caractéristiques uniques font du DM432C une solution idéale pour des applications nécessitant un fonctionnement fluide a basse vitesse
Refroidissement – La température du driver ne doit pas dépasser 70‹C et la température de fonctionnement du moteur ne doit pas dépasser 80‹C. – Il est recommande d’utiliser la fonction de réduction automatique du courant de repos, ce qui diminue l’échauffement du driver et du moteur. – Il est recommande de monter le boitier du driver verticalement pour maximiser la surface du refroidisseur. Une ventilation force peut être nécessaire
Description des broches
Le DM432C est équipé de 2 connecteurs débrochables : le connecteur pour les signaux de contrôle et le connecteur pour l’alimentation et le raccordement du moteur.
Configuration du connecteur ( connecteur Signal )
| Broches | Informations sur les broches |
| PUL+ PUL- |
Pulse signal : en mode impulsion simple (pulse/direction), une impulsion montante sur cette entrée fait avancer le moteur d’un pas. La tension de l’impulsion doit entre de 4,5 a 5 V pour un état HAUT et 0 a 0,5 V pour un état BAS. La largeur d’impulsion doit être de minimum 2,5 μs pour un fonctionnement correct. Une résistance en série doit être ajoutée pour limiter le courant en 12 V (1 PUL- kΩ) et en 24 V (2 kΩ). |
| DIR + DIR – |
DIR signal : en mode impulsion simple, ce signal a des niveaux de tension hauts et bas qui représentent les deux directions de rotation du moteur. Pour un fonctionnement fiable, ce signal doit être applique minimum 5 μs avant le signal PUL. La tension du signal DIR doit être de 4,5 a 5 V pour un état HAUT et 0 a 0,5 V pour un état BAS. La rotation dépend également du câblage du moteur. |
| ENA+ ENA- |
Enable signal : ce signal est utilise pour permettre ou interdire l’utilisation du driver. Un signal haut permet d’utiliser le driver tandis qu’un signal bas le bloque. Ces broches sont habituellement laissées déconnectées. |
Configuration du connecteur (l’alimentation et le raccordement du moteur )
| Broches | Informations sur les broches (l’alimentation et le raccordement du moteur ) |
| +Vcc |
Tension d’alimentation : 20 a 40 Vcc (fluctuations de l’alimentation et force contre-électromotrice incluses) |
| GND |
Masse |
| A+,A- | Phase A du moteur |
| B+,B- | Phase B du moteur |
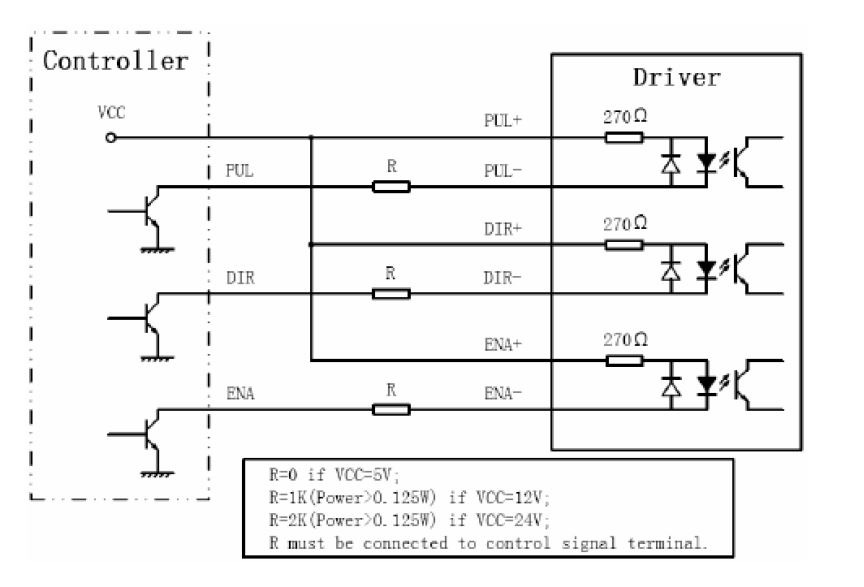
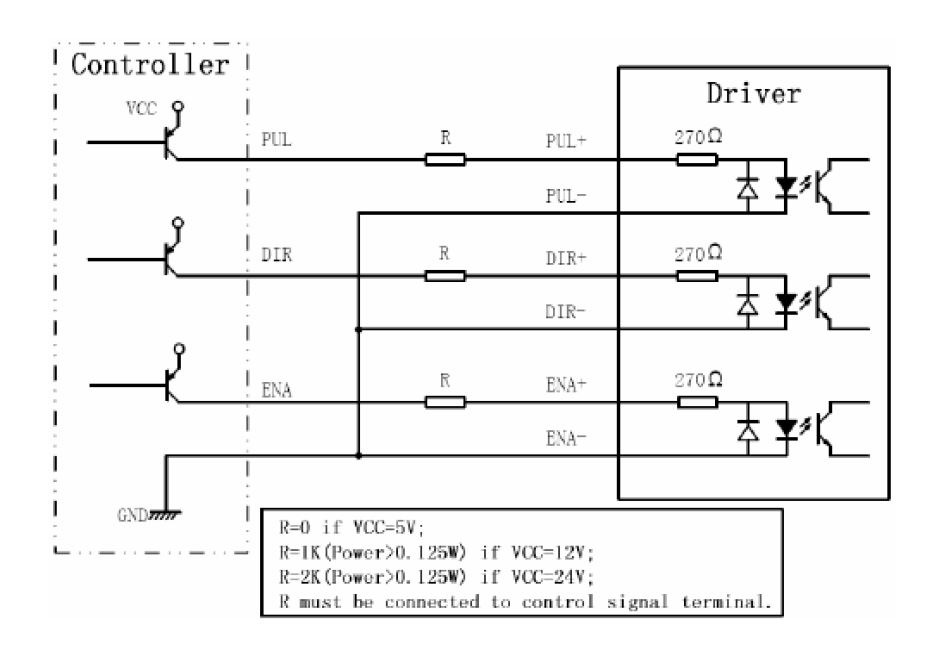
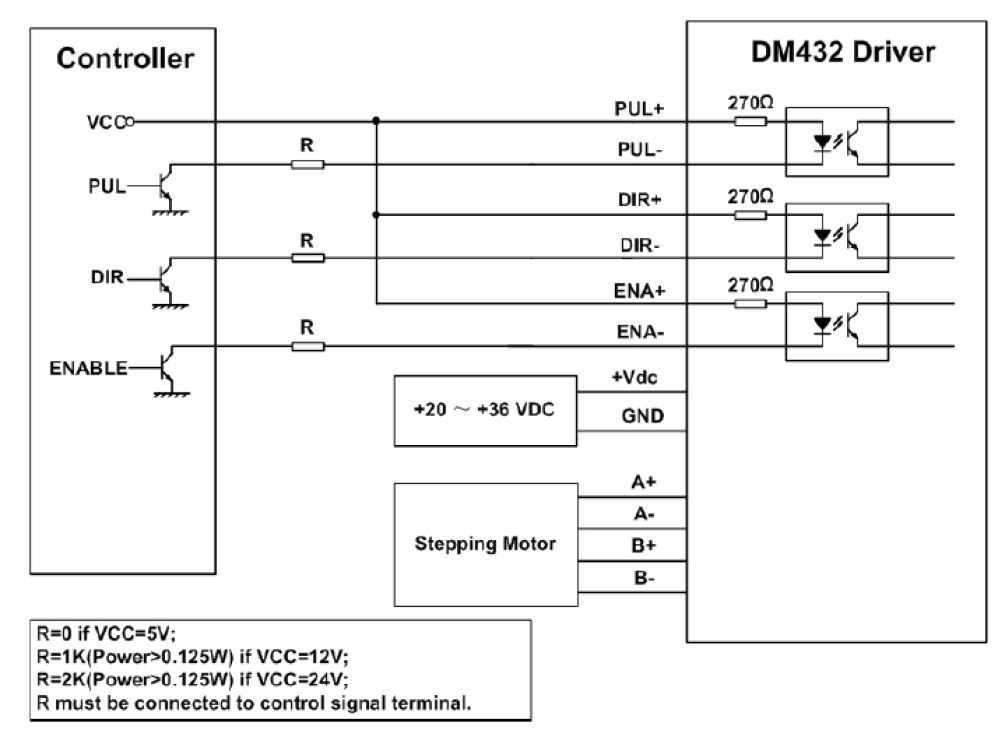
Signaux de contrôle (connecteur P1)
Le DM432C peut accepter des signaux différentiels et des signaux uniques (collecteur-ouvert et sortie PNP). Le DM432C dispose de 3 entrées logiques isolées optiquement situées sur le connecteur P1destinées a recevoir les signaux de commande. Les connexions en collecteur ouvert et PNP sont décrites dans les schémas ci-dessous :
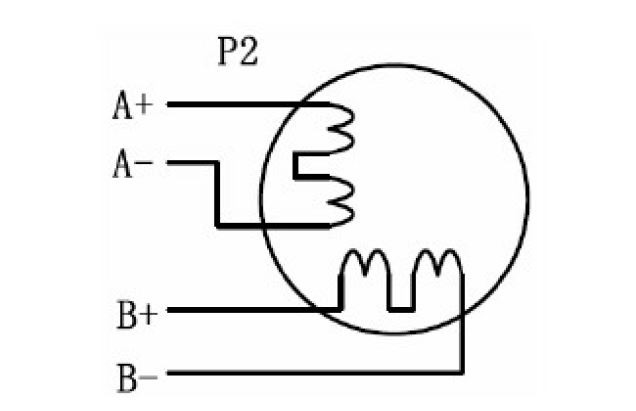
Raccordement du moteur
Le DM432C peut piloter des moteurs pas-a-pas bipolaires et unipolaires.
NE JAMAIS RACCORDER OU DECONNECTER LE MOTEUR LORSQUE LE DRIVER EST SOUS TENSION.
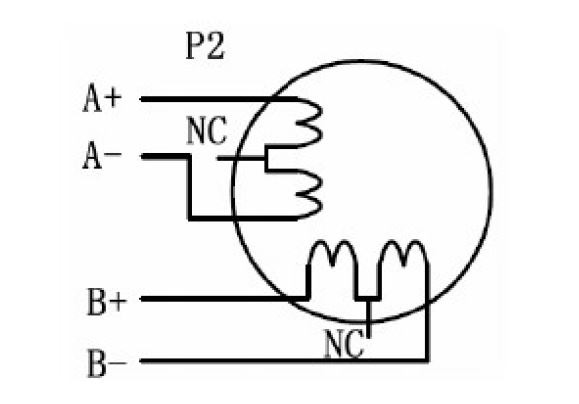
Connexions 4 fils Les moteurs bipolaires a 4 fils sont les plus faciles a câbler. La vitesse et le couple dépendent de l’inductance du bobinage. Lors de la sélection du courant de sortie du driver, il faut multiplier le courant de phase par 1,4 pour déterminer le courant de pointe.
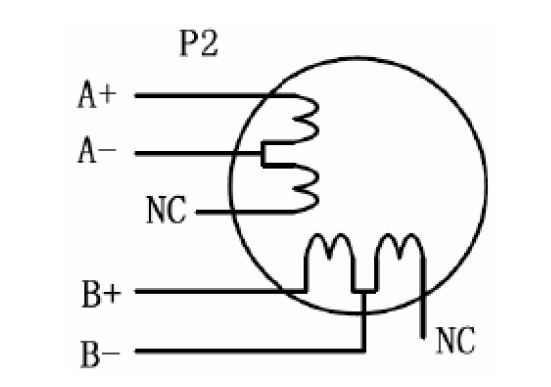
Connexions 6 fils
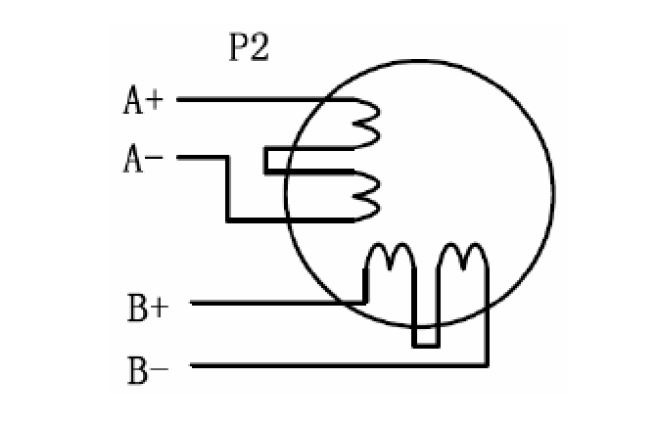
De même que pour les connexions a 8 fils, les moteurs a 6 fils peuvent être configures pour obtenir des vitesses ou un couple élevé. La configuration »half coil » n’utilise que la moitie du bobinage et favorise les vitesses élevées, tendus que la configuration »full coil » utilise tout le bobinage et privilégie le couple.
Configuration »half coil »
La moitie du bobinage est utilisée, ce qui donne une impédance plus faible et par conséquent moins de couple. Le couple sera plus stable a haute vitesse. Cette configuration est aussi appelée »half chopper ». Lors de la sélection du courant de sortie du driver, il faut multiplier le courant par phase (ou unipolaire) par 1,4 pour déterminer le courant de pointe.
Configuration »full coil »
La configuration »full coil » sur un moteur a 6 fils doit être utilisée pour des applications nécessitant un couple élevé a faible vitesse. En mode »full coil », le moteur doit fonctionner a seulement 70% de son courant nominal pour éviter la surchauffe.
Connexions 8 fils
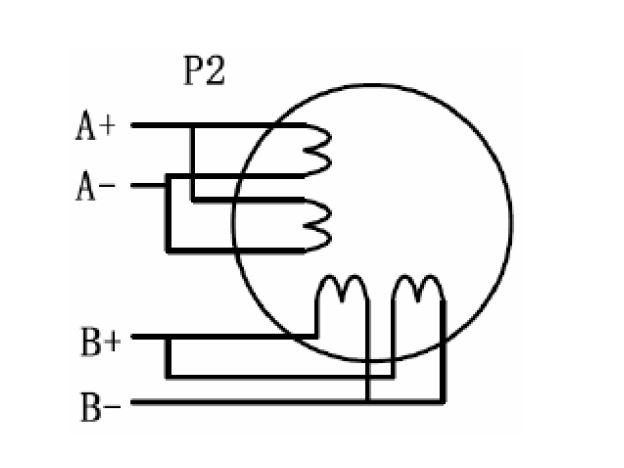
Les moteurs a 8 fils offrent un haut degré de flexibilité au concepteur car ils peuvent être raccordes en série ou en parallèle.
Connexions séries
Un raccordement en série est utilise dans des applications nécessitant un couple élevé a faible vitesse. Cette configuration procure l’inductance la plus élevée ce qui entraine une dégradation des performances a haute vitesse. En mode série, le moteur doit fonctionner a seulement 70% de son courant nominal pour éviter la surchauffe.
Connexions parallèles
Un raccordement en parallèle offre un couple plus stable mais plus faible a faible vitesse. En raison de l’inductance plus faible, le couple sera plus élevé a haute vitesse. Lors de la sélection du courant de sortie du driver, il faut multiplier le courant par phase (ou unipolaire) par 1,96 pour déterminer le courant de pointe.
Choix de l’alimentation
Le DM432C convient pour des moteurs de petite et moyenne tailles de NEMA 14 a 23. La tension d’alimentation détermine les performances du moteur a haute vitesse tandis que le courant détermine le couple de sortie du moteur spécialement a faible vitesse. Un tension d’alimentation élevée permettra d’atteindre des vitesses élevées, mais l’échauffement et le bruit seront plus importants. Si la vitesse demandée est faible, il est préférable d’utiliser une tension d’alimentation plus faible pour diminuer le bruit et l’échauffement et améliorer la fiabilité de fonctionnement.
Alimentation régulée ou non-régulée
Il est possible d’alimenter le driver avec une alimentation continue régulée ou simplement redressée et filtrée (non-régulée). Cependant, les alimentations non-régulées sont plus aptes a procurer un courant important instantanément.
Lors de l’utilisation d’une alimentation régulée, il faut prévoir une réserve de puissance suffisante pour assurer un fonctionnement correct en toutes circonstances (par exemple prendre une alim de 4A pour un courant nécessaire de 3A).
Choix de la tension d’alimentation
Les MOSFETS de puissance du DM432C peuvent fonctionner de 20 a 40 Vcc, fluctuations et force contre-électromotrice générée par le moteur incluses. Une tension d’alimentation élevée augmente le couple a haute vitesse, ce qui permet d’éviter de perdre des pas. Cependant, une tension d’alimentation élevée peut causer des vibrations du moteur a vitesse réduite et une surtension peut mettre le driver en protection ou l’endommager. Il est donc conseille de choisir la tension d’alimentation suffisamment haute pour l’application envisagée, et de ne pas sortir de la plage 20 Vcc a 36 Vcc.
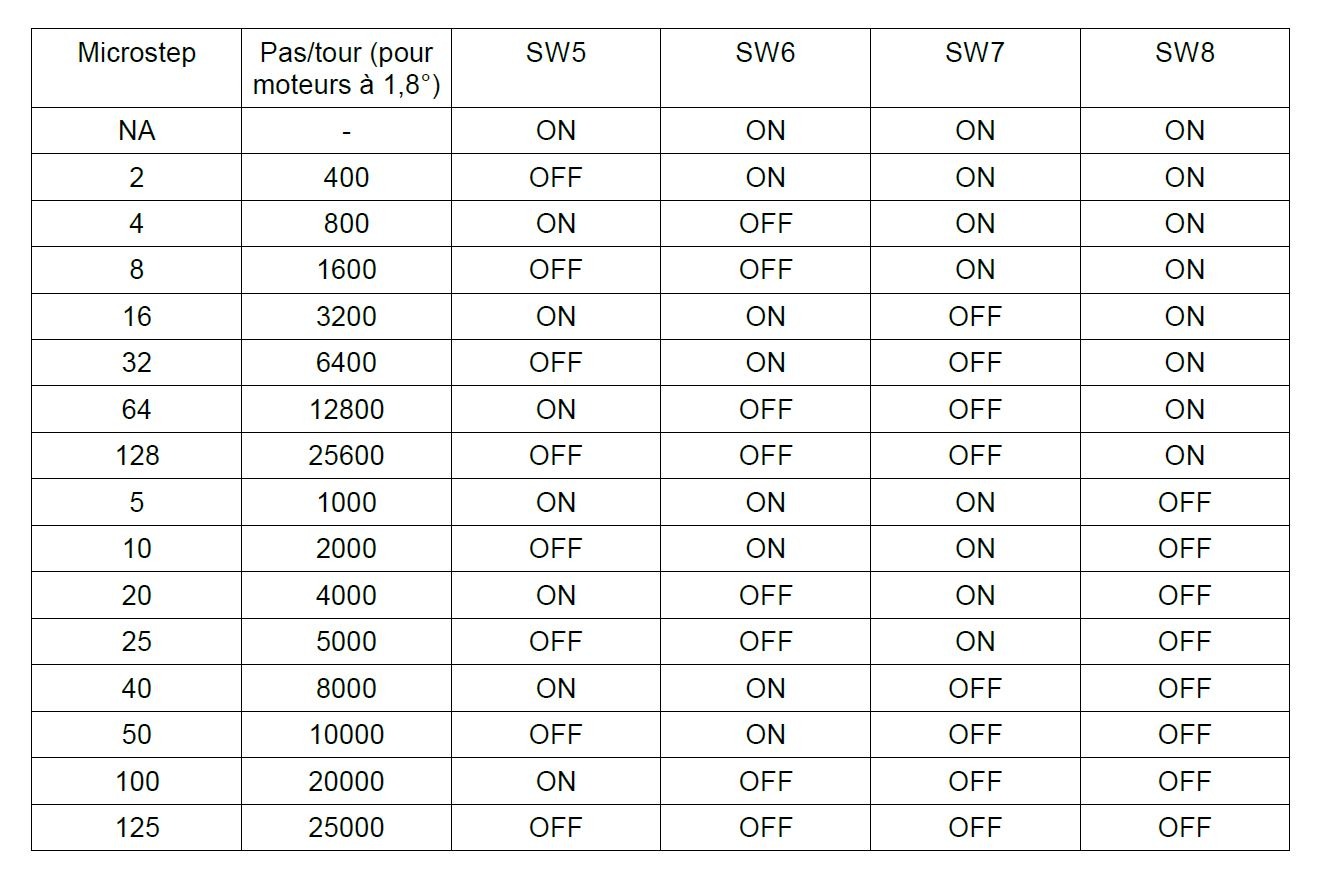
Sélection de la résolution et du courant
La résolution et le courant de sortie sont sélectionnables a l’aide de dip-switches. Un mode de configuration par logiciel existe mais nécessite un câble spécifique non disponible.
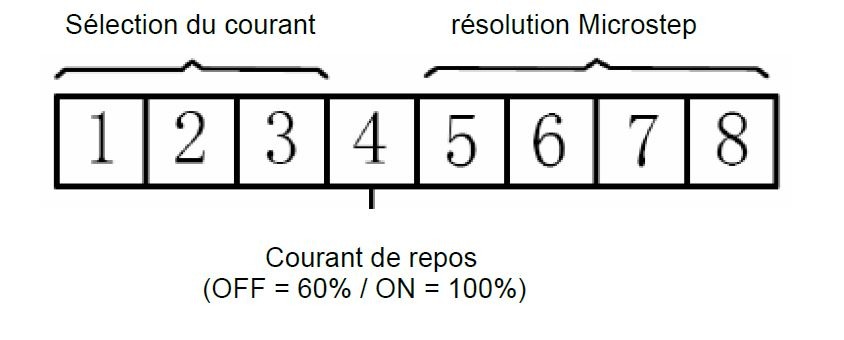
Sélection de la resolution Microstep
Réglage du courant
Pour un moteur donne, plus le courant du driver est élevé, plus le couple est élevé, mais cela entraine plus d’échauffement dans le moteur et le driver. Par conséquent, le courant de sortie est en général ajuste de façon a éviter une surchauffe du moteur lors d’une utilisation prolongée. Le raccordement en série ou en parallèle des bobinages modifie de manière significative les inductance et résistance résultantes d’où l’importance d’en tenir compte lors du choix du courant de sortie.
L’intensité communiquée par le fabricant du moteur est importante pour sélectionner le courant, mais il faut également tenir compte du mode de raccordement.
Les 3 premiers inters du dip-switch permettent de régler le courant de sortie
Réglage du courant de sortie dynamique
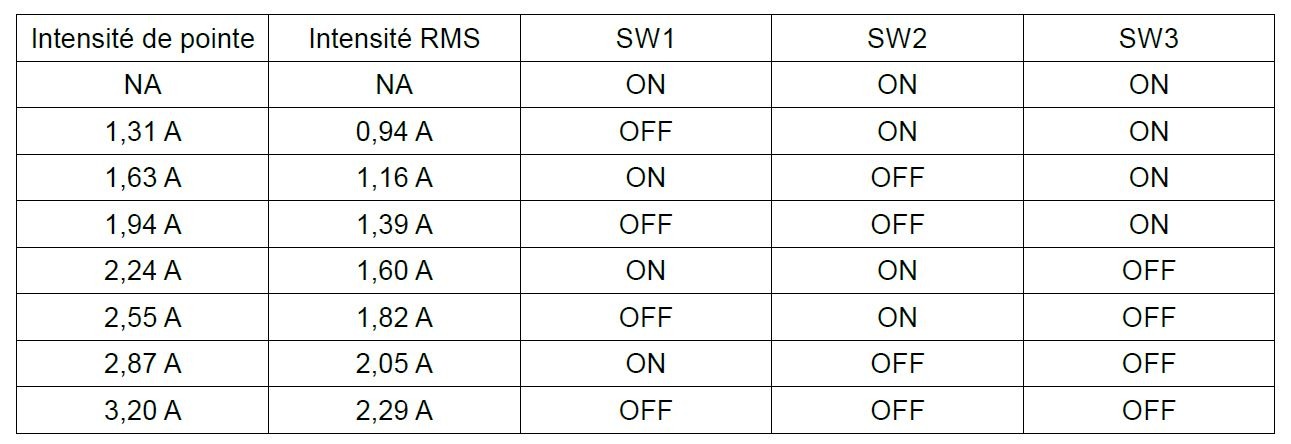
Note : en raison de l’inductance du moteur, l’intensité réelle dans les bobinages peut être plus faible que l’intensité de sortie dynamique sélectionnée, notamment en haute vitesse.
Réglage du courant de repos
SW4 permet de choisir entre un courant de repos réduit ou non. La position OFF permet de réduire le courant dans les bobinages a la moitie du courant de sortie sélectionné tandis que la position ON laisse le courant inchangé.
Le courant est automatiquement réduit a 60% de la valeur sélectionnée une seconde après la dernière impulsion. Cela doit diminuer l’échauffement théorique a 36% de sa valeur initiale.
Remarques concernant le câblage
– il est recommande d’utiliser du cable blinde torsade pour eviter les interférences
– pour eviter de perturber les signaux PUL et DIR, il est fortement deconseille de placer les câbles de commande et de puissance a proximite les uns des autres (une distance de 10 cm entre les cables de puissance et de commande est conseillée)
– la connexion ou deconnexion du connecteur P2 lorsque le driver est sous tension (meme si le moteur est au repos) endommagera le driver et annulera la garantie
Signaux de commande
Afin d’évitera toutes perturbations de fonctionnement, les signaux de commande doivent respecter les règles ci-dessous :
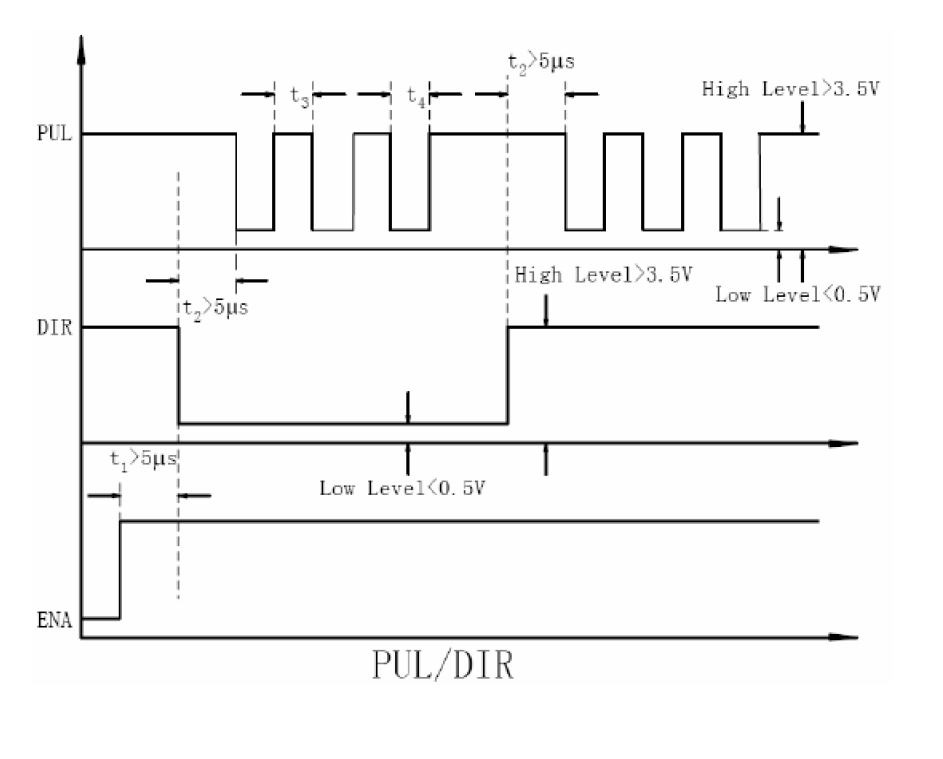
Remarques :
– t1 : ENA doit précéder DIR de minimum 5 μs. En règle générale, ENA+ et ENA- ne sont pas connectées.
– t2 : DIR doit précéder PUL de minimum 5 μs pour assurer la rotation dans le bon sens.
– t3 : la largeur de l’impulsion doit être de 2,5 μs minimum
– t4 : la largeur de l’impulsion basse doit être de 2,5 μs minimum
Protections
Le driver est équipe de protections et utilise une LED rouge pour indiquer quelle protection a été activée. La période de la LED est de 3 secondes et le nombre de clignotements indique le type de protection active. Etant donne qu’une seule protection peut être indiquée par la led, le driver indique la protection en fonction des priorités.
Leadshine – 3/F, Block 2, Nanyou Tianan Industrial Park, Nanshan District Shenzhen, China (traduction Gotronic)
Rappel : Documentation sur le matériel utile dans nos réalisations. Ces documentations sont soit: des traductions issues de la documentation constructeur ou de nos fournisseurs ( ou des traduction fournisseur ) . Nous avons travaillé avec cette documentation mais il se peut qu’une erreur se soit glissée dans nos lignes et nous ne pouvons être tenu pour responsable .
![]()
Ensemble des moteurs pas-à-pas compatibles avec le driver DM432C
| Référence moteur | 14HS13-0406S | 14HS11-1004S | 35STH26-1004B | 14HS17-0504S | 35STH36R | POL2268 |
| distributeur | Gotronic | Gotronic | Gotronic | Gotronic | Gotronic | Distributeur |
| Définition norme Nema |
14 | 14 | 14 | 14 | 14 | 17 |
| Nbrs de pas | 200 | 200 | 200 | 200 | 200 | 200 |
| angle de pas | 1,8° | 1,8° | 1,8° | 1,8° | 1,8° | 1,8° |
| Alimentation | 10V | 3,5V | 12V | 7,5V | 12V | 2.8V |
| Courant phase | 0,4A | 1A | 1A | 0,5A | 1A | 1.7A |
| Couple de maintien | 1kg,cm | 1,25kg,cm | 1,2kg,cm | 2,3kg,cm | 1,4kg,cm | 3.7kg,cm |
| connexion | 6 fils | 4 fils | 4 fils | 4 fils | 4 fils | 4 fils |
| Poids | 170g | 120g | 0 | 200g | 0 | 385g |
| Longueur de l’axe | 22mm | 23mm | 19mm | 23mm | 19mm | 280mm |
| diamètre de l’axe | 5mm | 5mm | 5mm | 5mm | 5mm | 8mm fil |
| long axe arriere | 0 | 0 | 13mm | 0 | 13mm | 0 |
| diamètre axe arriere | 0 | 0 | 3,9mm | 0 | 3,8mm | 0 |
| driver | DM432C | DM432C | A voir | DM432C | A voir | A voir |
![]()
***
Etape n°1 Montage des yeux de Sentinel
Etape n°2 Montage du bloc webcam
Etape n°3 Montage des yeux +servo + cils et bielle
Etape n°4 Montage des yeux +servo+bielle+webcam+barre