***
Mise à jour le 21/02/2015
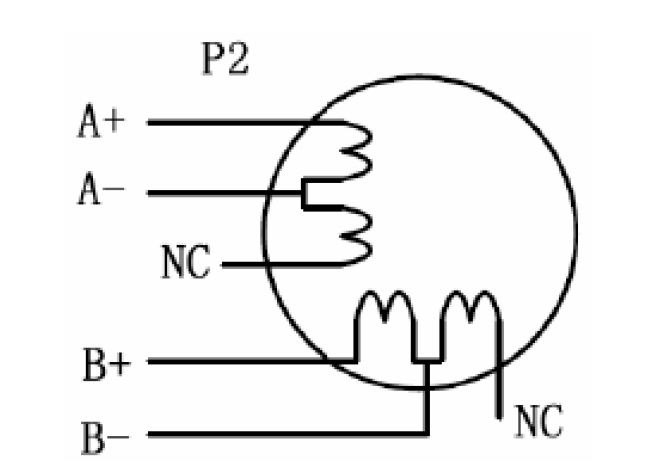
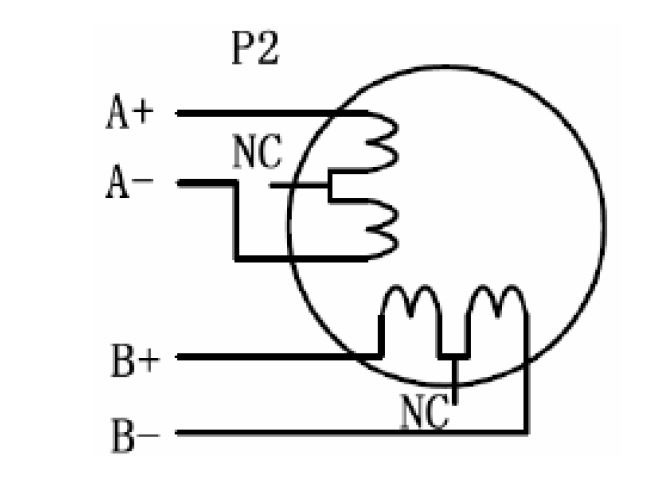
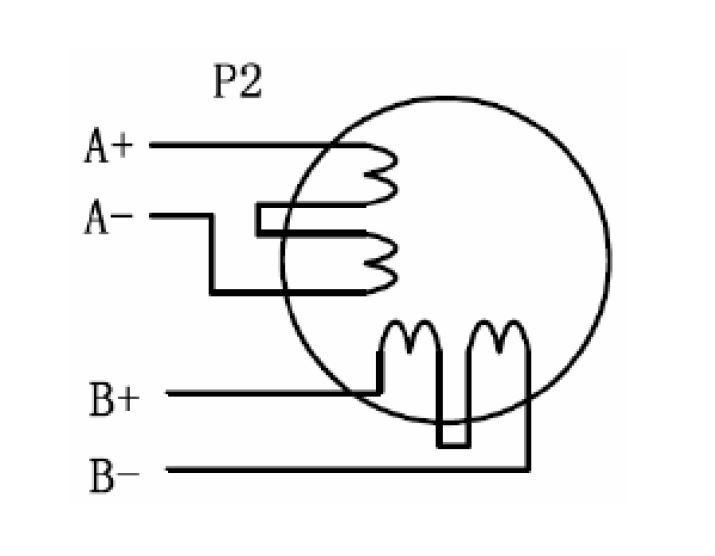
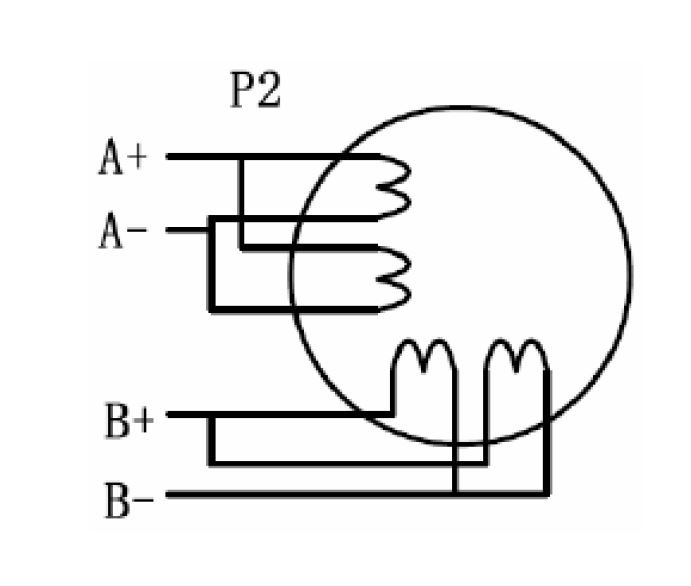
Cette librairie vous permet de contrôler des moteurs pas à pas unipolaires et bipolaires. Ce type de moteur est très courant dans tous les dispositifs où l’on souhaite faire du contrôle de vitesse ou de position en boucle ouverte ( sans retour d’une information pour vérifier la réponse du système ) . Un moteur pas à pas est capable d’exécuter des rotations « angle par angle » d’une grande précision. Pour utiliser cette librairie avec votre carte Arduino, vous aurez besoin d’un moteur pas à pas et d’une interface de puissance adaptée pour contrôler le moteur.
Pour inclure la librairie Stepper dans un programme, on ajoutera au début du programme la ligne suivante :
#include <Stepper.h>
| Fonction | Définition de la fonction |
| setSpeed() |
Cela permet de définir la vitesse de rotation du moteur c’est a dire la fréquence des signaux rectangulaire Exemple: |
| steps() |
C’est le fonction la plus utile puisque c’est celle qui permet de faire tourner le moteur du nombre de pas spécifié Exemple: nombre_de_pas est une variable int [Une variable de type int (pour integer, entier en anglais], spécifiant le nombre de pas à générer. Cette variable variable peut être positive ou négative selon le sens dans le lequel on veut faire tourner le moteur.
|
![]()