***
Mise à jour le 09/06/2015
Dans cet article vous trouverez la vidéo , le schéma de câblage et le programme de test de la main .

Mise à jour le 09/06/2015
Dans cet article vous trouverez la vidéo , le schéma de câblage et le programme de test de la main .















Ce tutoriel vous montre le montage du mécanisme de vision ainsi que la mise en place de système de rotation et d’articulation du cou
Mise à jour le 28/06/2019 : Voici donc l’étude et les fichiers pour l’impression 3D de la main de Sentinel, celle-ci a été choisi sur le thème du « Terminator » . Les doigts fonctionnent avec cinq servomoteurs. L’ensemble des fichiers est disponible pour les mains droite. Dans la rubrique rotation poignée, vous trouverez l’adaptation entre la main et la partie de Sentinel ou éventuellement avec un robot de votre fabrication. Continuer la lecture
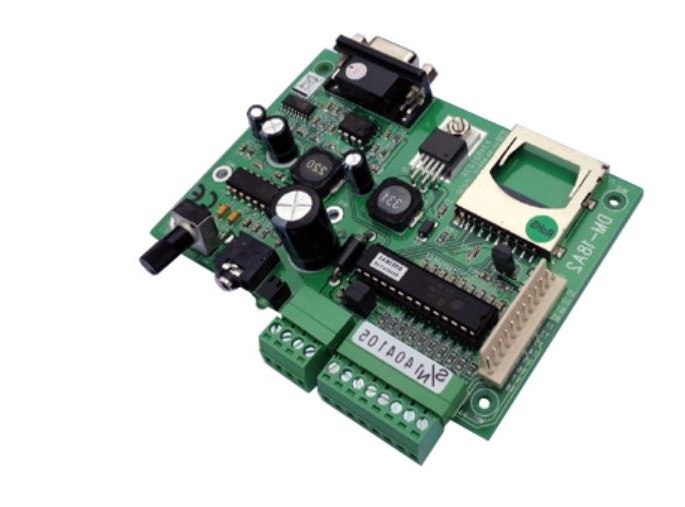
Dotée de 6 modes de fonctionnement différents, la « DM-18A » fait partie des cartes de restitution sonores de la famille « Quick Wave« , lesquelles sont capables de « relire » directement des fichiers « sonores » au format « .WAV ».
Mise à jour le 22/04/2015
Les essais du 22/04/2015 ont été uniquement des essais de traction. Le châssis est très robuste et puissant il est capable de tracter une charge de 1500 kg
Mise à jour le 12/04/2015
Après plusieurs essais de construction de main trouvée sur Internet et le peu de résultat satisfaisant , notre groupe a décidé de s’engager sur la construction d’une main 100 % Redohm . Nous ne voulions pas que la main de notre robot ressemble trop à une main humaine mais plutôt à celle d’un robot à l’aspect mécanique un peu dans le style de celle du Terminator.Voici donc un ensemble de photos de la main de Sentinel avec ses servomoteurs montés .Nous avons déjà sorti l’ensemble des pièces sur l’imprimante 3D . Evidemment les fichiers seront disponibles sur notre site
Mise à jour le 14/06/2015




















![]()
Mise à jour le 20/03/2015
Les cartes Arduino disposent d’une communication série matérielle sur les broches 0 et 1 (qui va aussi à l’ordinateur via la connexion USB).Cette communication série matérielle est réalisée par un module matériel (intégré dans la puce) appelé UART . Ce matériel permet a la puce Atmega de recevoir des communications série même en travaillant sur d’autres tâches, tant qu’il y a de la place dans les 64 octets de buffer de l’UART (le buffer est reçoit les données entrantes et les stocke en attendant qu’elles soit lues).
Pour inclure la librairie SerialSoftware dans un programme, on ajoutera au début du programme la ligne suivante :
#include <SoftwareSerial.h>
| Fonction | Définition de la fonction | ||
| SoftwareSerial() |
Un appel de l’instruction SoftwareSerial(rxBroche, txBroche) crée un nouvel objet SoftwareSerial, que vous pourrez nommer selon votre choix Exemple de Syntaxe : SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
Exemple dans un programme:
|
||
| begin() | Définit la vitesse pour la communication série . L’utilisation d’une vitesse supérieures à 9600 bauds donnera des erreurs de communications Exemple de Syntaxe : mySerial.begin(9600); Exemple dans un programme:
|
||
| read() |
Lit un caractère sur la broche en réception sur le port série logiciel . Il le lit et renvoie la valeur reçue Exemple de Syntaxe : char a = serial.read(); |
||
| print() |
Affiche dans une fenêtre Terminal les données émises par la broche d’émission du port série logiciel Exemple de Syntaxe : mySerial.print(valeur) ou mySerial.print(valeur, format)
|
||
| println() |
Affiche dans une fenêtre Terminal les données émises par la broche d’émission du port série logiciel, suivi d’un saut de ligne. Exemple de Syntaxe : mySerial.println(valeur) ou mySerial.println(valeur, format) Cette instruction peut prendre plusieurs formes :
|
![]()