.
Mise à jour le 24/10/2019. Rubrique traitant du module IMU Grove 101020079. Un module IMU est d’une centrale à inertie servant à la navigation.

Mise à jour le 09/05/2016
Sommaire :
– Présentation du module gyroscope Grove 101020050
– Brochage du capteur
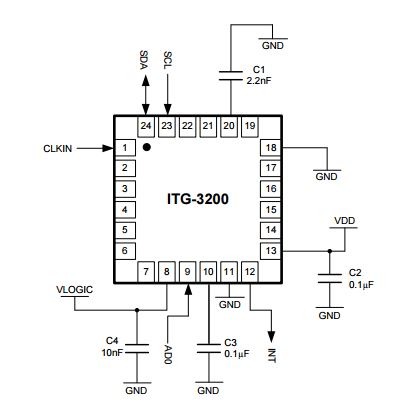
– Schéma d’exploitation du capteur
– Diagramme de fonctionnement
– Initialisation du capteur
– Lecture des données du capteur
– Exemple de programme
– Téléchargement de la librairie du 09/05/2016 ( constructeur )
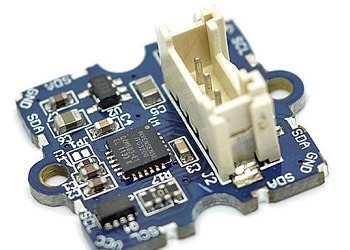
Module gyroscope Grove 101020050
Ce module gyroscope 3 axes compatible Grove est basé sur le circuit ITG3200 et communique avec le microcontrôleur via un port I2C. Le circuit ITG3200 dispose de 3 convertisseurs ADC 16 bits, d’un filtre passe-bas et d’une interface I2C rapide.
Ce module se raccorde sur un port I2C du Grove Base Shield ou du Mega Shield via un câble 4 conducteurs .
Interface: compatible Grove
Alimentation: 3 à 5 Vcc
Consommation:
– en fonctionnement: 6,5 mA
– en stand-by: 5 µA
Sorties: axes X, Y et Z
Sensibilité: 14 LSBs par °/sec
Plage de mesure: ±2000°/sec
Protocole: I2C rapide (400 kHz)
Dimensions: 20 x 20 x 13 mm
Non compatible avec Tinker Kit
Référence Seeedstudio: 101020050 (remplace SEN11763P)
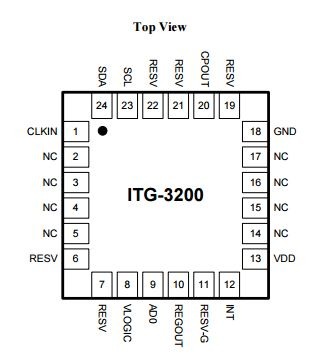
Définition des broches du capteurs |
||
| 1 | CLKIN | En option entrée d’horloge de référence externe. Connecté à GND si la broche est inutilisés. |
| 2/3/4/5 | NC | Non connecté en interne. Peut être utilisé pour la tracé de la carte |
| 6/7 | RESV | Réservé. Ne pas connecter. |
| 8 | VLOGIC | IO numérique la tension d’alimentation. VLOGIC doit être ≤ VDD en tout temps. |
| 9 | AD0 | Adresse I2C Esclave LSB |
| 10 | REGOUT | Régulateur connexion condensateur de filtrage |
| 11 | RESV | Réservé. Ne pas connecter. |
| 12 | INT | Interrupt digital output (totem pole ou drain ouvert) |
| 13 | VDD | Tension d’alimentation [ -0.5V to +6V ] |
| 14/15/16/17 | NC | Non connecté en interne. Peut être utilisé pour la tracé de la carte |
| 18 | GND | Tenion d’alimentation [ 0V ] |
| 19 | RESV | Réservé. Ne pas connecter. |
| 20 | CPOUT | Connexion condensateur |
| 21/22 | RESV | Réservé. Ne pas connecter. |
| 23 | SCL | I2C serial Horloge |
| 24 | SDA | I2C serial Données |
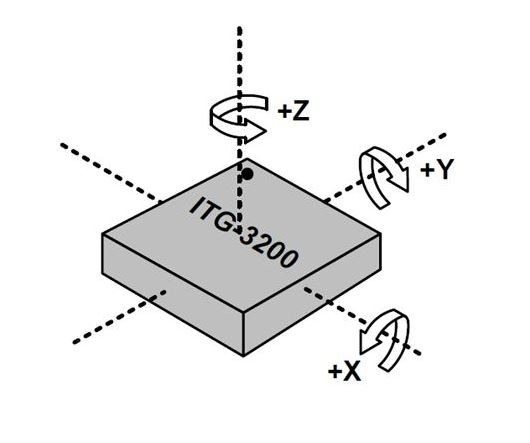
Le dessin ci-dessous montre les orientations des 3 axes. Vous pouvez l’utiliser pour comprendre les significations physiques du résultat.
|
1 2 3 4 5 6 |
// // //calibration du gyroscope pour cela il faut 200 mesures // gyro.init(); gyro.zeroCalibrate(200,10); |
|
1 2 3 4 5 |
// // // void getXYZ(int16_t *x,int16_t *y,int16_t *z); void getAngularVelocity(float *ax,float *ay,float *az); |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 |
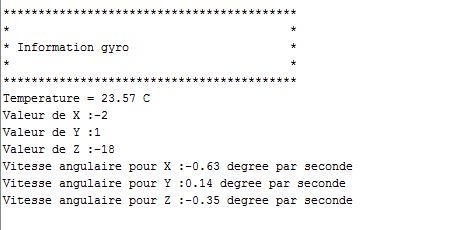
/* * * Commenté par RedOHM * et modifié d'apres les sources * orginale * * Exemple de programme pour le * gyroscope Grove SEN11763P ou * nouvelle reference 101020050 * * * 06/05/2016 */ // Initialise la library Wire et se connecte au bus I2C // Cette instruction ne doit normalement n'être appelée qu'une seule fois #include <Wire.h> // Initialise la library ITG3200 du gyroscope #include "ITG3200.h" ITG3200 gyro; // Un programme Arduino doit impérativement contenir cette fonction . // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur Serial.begin(9600); //initialisation du gyroscope gyro.init(); // calibration du gyroscope pour cela il faut 200 mesures // temps necessaire 200*10ms gyro.zeroCalibrate(200,10); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { Serial.println ("******************************************"); Serial.println ("* *"); Serial.println ("* Information gyro *"); Serial.println ("* *"); Serial.println ("******************************************"); // Affichage de la temperature Serial.print("Temperature = "); Serial.print(gyro.getTemperature()); Serial.println(" C"); int16_t x,y,z; gyro.getXYZ(&x,&y,&z); Serial.print("Valeur de X :"); Serial.println(x); Serial.print("Valeur de Y :"); Serial.println(y); Serial.print("Valeur de Z :"); Serial.println(z); //Definition de --> float //Déclaration des variables de type virgule flottante //(nombres à virgules) float ax,ay,az; gyro.getAngularVelocity(&ax,&ay,&az); Serial.print("Vitesse angulaire pour X :"); Serial.print(ax); Serial.println(" degree par seconde"); Serial.print("Vitesse angulaire pour Y :"); Serial.print(ay); Serial.println(" degree par seconde"); Serial.print("Vitesse angulaire pour Z :"); Serial.print(az); Serial.println(" degree par seconde"); Serial.println(" "); delay(1000); } |
Documentation fournisseur : Gotronic
Source technique : Seeedwiki
Information complémentaire : Gitub
![]()
Mise à jour le 25/04/2016
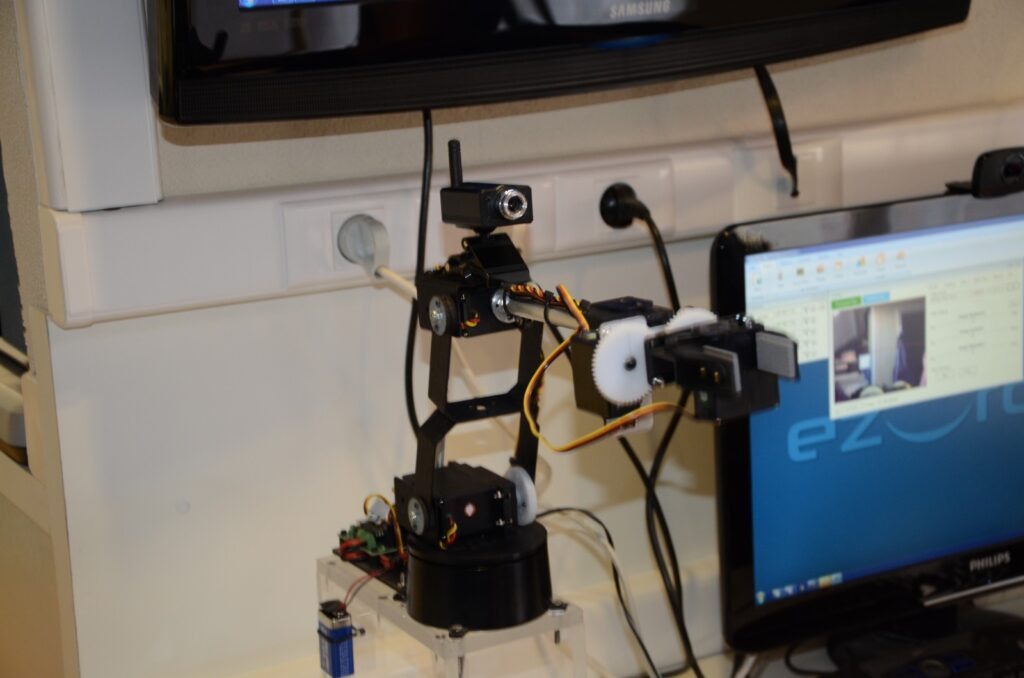

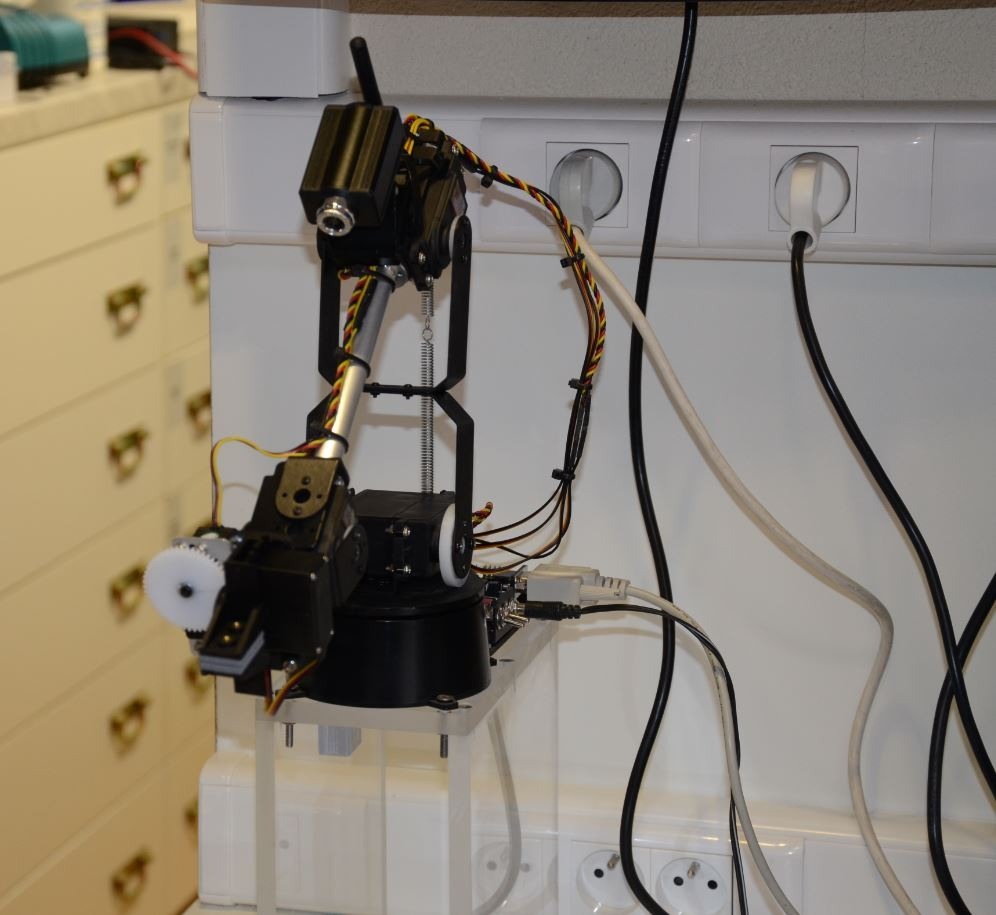
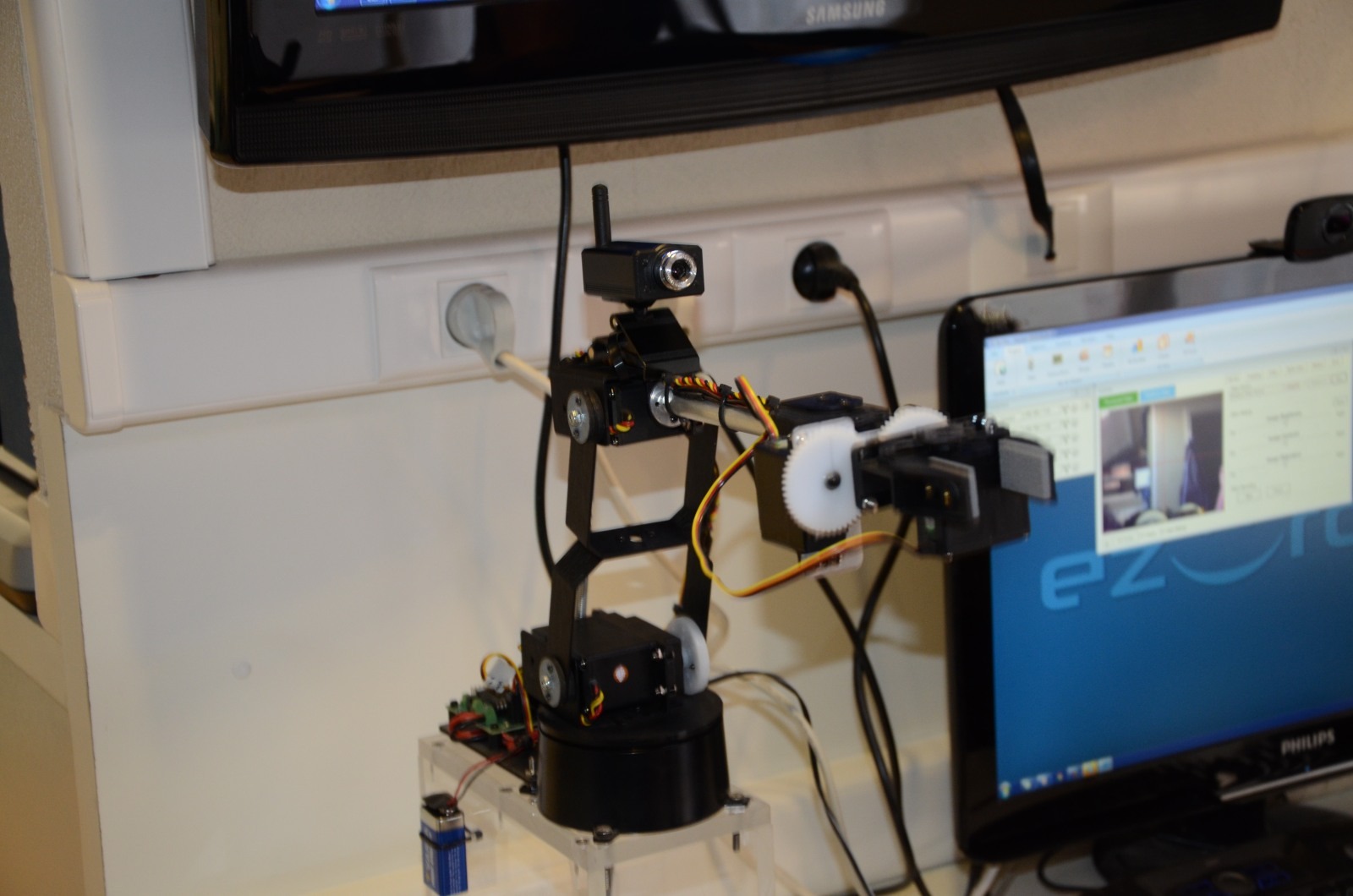
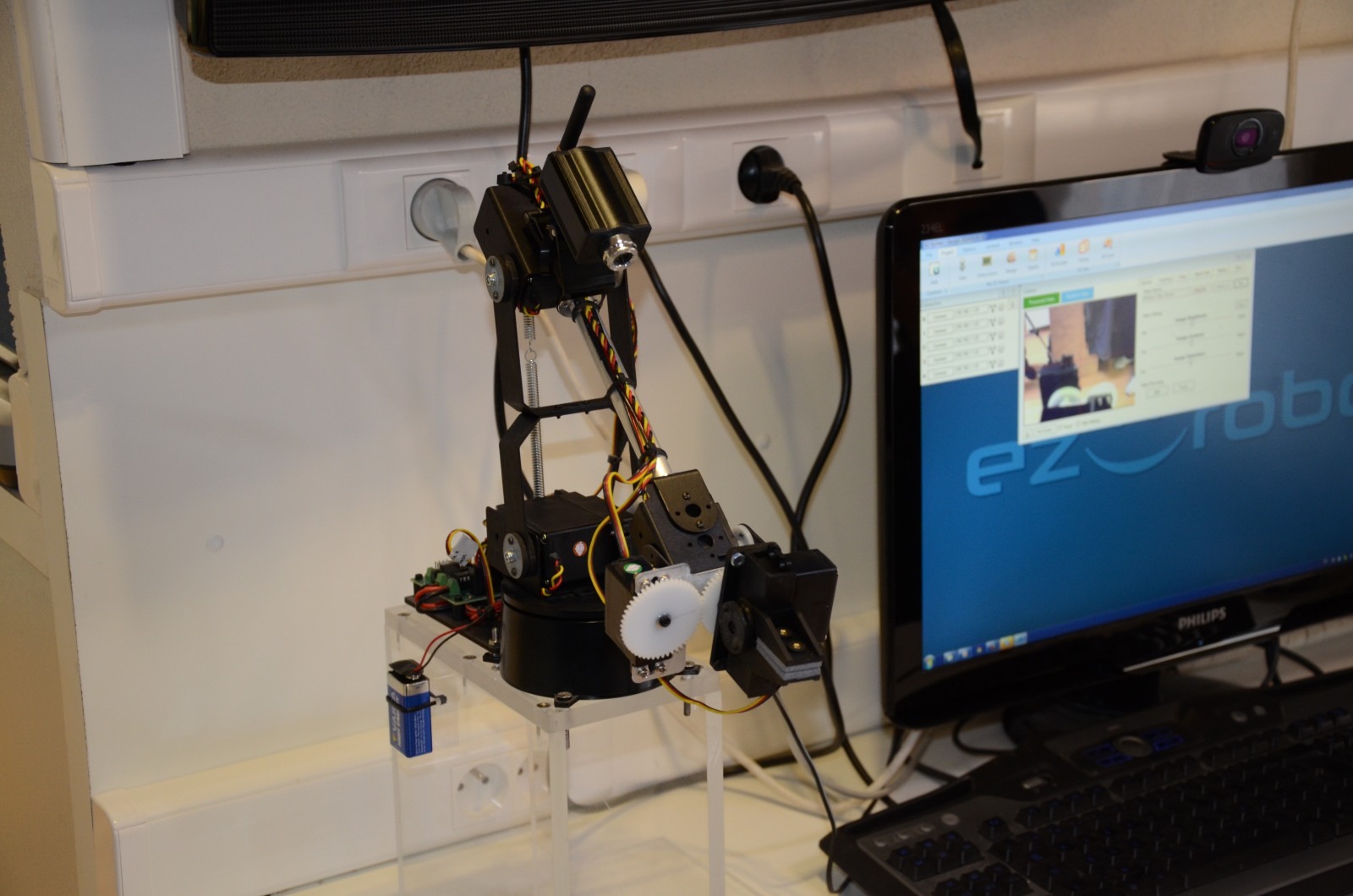
Poste de pilotage du bras manipulateur
Module accéléromètre 3 axes ,Accéléromètre et gyroscope 3 axes ,Module accéléromètre , Détecteur de vibrations
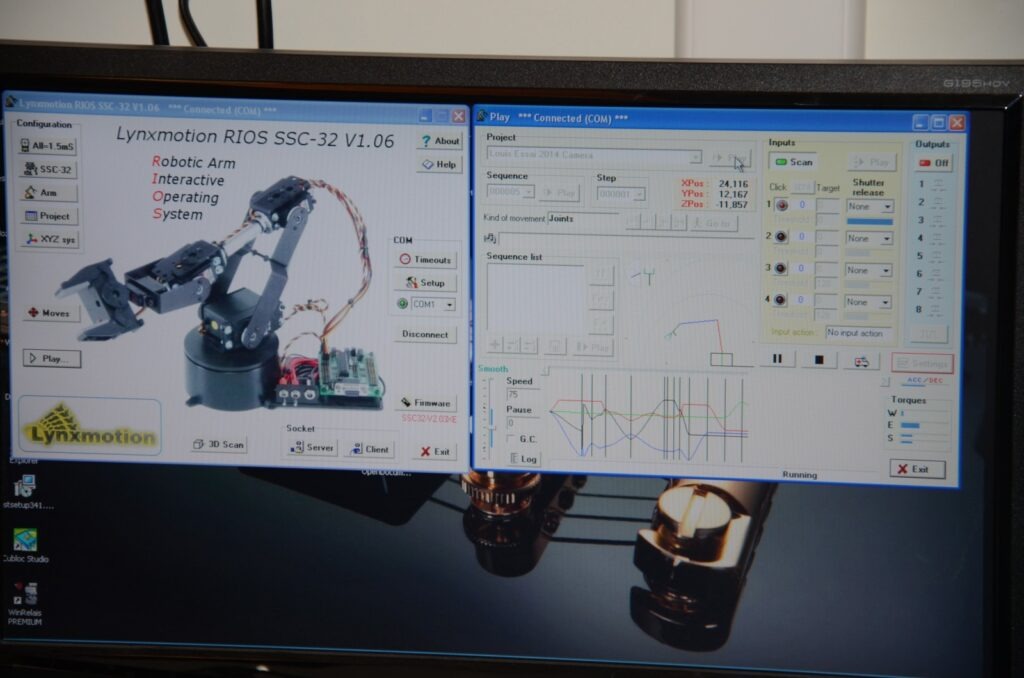

Carte electronique de contrôle
Carte Lynxmotion basée sur un ATMEGA8-16 permet de contrôler jusqu’à 32 servomoteurs avec une résolution de 1 µs. Configuration possible en mouvement rapide, contrôle de vitesse, temporisation ou une combinaison de ces possibilités.
La fonction ‘Group Move’ permet de faire démarrer et arrêter en même temps une combinaison de différents moteurs. La carte propose également une séquence de 12 servos pour un robot Hexapode. Le logiciel est proposé en téléchargement gratuit. Les logiciels RIOS et SEQ01 sont proposés en option.
Microcontrôleur: Atmel ATMEGA8-16PI
Sorties: 32 (Servomoteur ou TTL)
Entrées: 4
partie logique: 6 à 9 Vcc
servomoteur: 4,8 à 7,2 Vcc
Interface PC: série
Servomoteurs supportés: Futaba ou Hitec
Ensemble du matériel utile à la construction du bras |
||

Servomoteur HS422
|

Servomoteur HS485
|

Servomoteur HS-645
|
Fournisseur :Ordre de prix entre 12 à 15 € suivant fournisseur |
Fournisseur :Ordre de prix entre 23 à 27 € suivant fournisseur |
Fournisseur :Ordre de prix entre 44 à 52 € suivant fournisseur |

Servomoteur HS-755
|

Servomoteur HS-805
|
|
Fournisseur :Ordre de prix entre 40 à 45 € suivant fournisseur |
Fournisseur :Ordre de prix entre 40 à 45 € suivant fournisseur |
|
![]()
Mise à jour le 03/11/2019 . Dans cet article vous trouverez les caractéristiques principales de driver de moteur à pas utilisé par RedOhm .
Sommaire :
.
Retour au sommaire.
![]()
Présentation d’un driver de moteur pas à pas |
Une commande de moteur ou un driver de moteur : C’est un ensemble qui entre le moteur et l’utilisateur qui permet de convertir des signaux électriques pour que le moteur puisse les interpréter.
L’alimentation du moteur avec ses contraintes de tensions, courants et puissances à dissiper ainsi que la protection contre les surtensions et les surintensités. C’est l’électronique de puissance.
Le séquenceur qui gère la chronologie des impulsions :
A savoir:
La vitesse de rotation et le couple des moteurs pas-à-pas dépendent de la tension d’alimentation et de l’inductance (ou du courant). Une faible inductance donne un faible couple mais permet d’atteindre des vitesses plus élevées. A contrario, une inductance élevée procure un couple élevé à basse vitesse.
Le choix de l’alimentation est primordial. Si l’application nécessite une faible vitesse, il est préférable d’utiliser une tension d’alimentation proche du minimum possible, ce qui diminue le bruit et l’échauffement et augmente le couple. Une tension d’alimentation élevée donnera une grande vitesse mais au prix de plus de bruit, d’échauffement et de possibles vibrations à basse vitesse.
Il est possible d’utiliser des alimentations continues régulées ou simplement redressées et filtrées. Lors de l’utilisation d’une alimentation régulée, il faut prévoir une réserve de puissance suffisante (par exemple prévoir 4 A pour un courant de 3 A). La tension conseillée pour alimenter le driver devrait être entre 3 fois et 25 fois la tension nominale du moteur.
.
![]()
Commande de pas-à-pas Big EasyDriver |
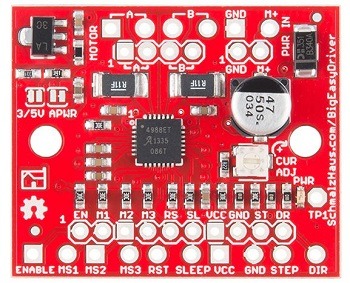 La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
Elle est basée sur le circuit Allegro A4988 et permet de contrôler un moteur pas-à-pas très facilement à partir d’un microcontrôleur (une broche pour la direction et une pour la vitesse). Le module permet de fonctionner en mode pas complet, demi-pas, quart de pas, 1/8 de pas et 1/16 de pas (mode par défaut).
.
![]()
Commande moteur pas-à-pas DRI0043
|

Commande moteur pas-à-pas DRI0043
Module économique TB6600 permettant de commander un moteur pas-à-pas bipolaire jusqu’à 3,5 A RMS à partir de 3 sorties digitales d’un microcontrôleur (Arduino par exemple).
Ce driver fonctionne en pas complet, 1/2 pas, 1/4 de pas, 1/8 de pas, 1/16 de pas et 1/32 de pas (sélection par dip-switches).
A savoir :
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
Fournisseur : Gotronic
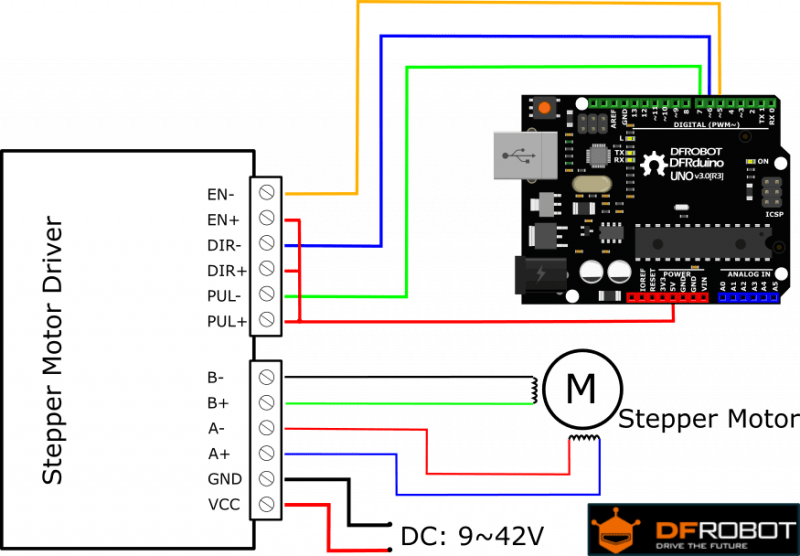
Schéma de câblage de principe , du driver DRI0043
.
![]()
Driver de moteur pas-à-pas DM432C |

Driver de moteur pas-à-pas DM432C
Le DM432C de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
Il convient pour les moteurs bipolaires ou unipolaires 6 fils (half coil ou full coil) de la série NEMA 14 à 23 et sa fonction multistep permet d’atteindre des résolutions très élevées.
A savoir:
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
.
![]()
Driver de moteur pas-à-pas DM860 |

Le DM860 de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
.
Retour au sommaire.
![]()
Mise à jour le 15/02/2020 – Rubrique traitant du module led RGB 8 mm Grove , en particulier sur Arduino méga et nano . Nous traitons des 2 versions 104030006 / 104020048
Mise à jour le 22/10/2017 : Cette rubrique a pour but d’exposer des systèmes d’acquisition que RedOhm à tester en vue de les utiliser sur ces applications
A savoir :
Un système d’acquisition de donnée représente l’interface entre l’ordinateur et le capteur. Ce système composé de carte électronique et de logiciel informatique permet de recueillir automatiquement les informations analogiques ou numériques provenant du capteur.

Leap Motion, Inc. est une société américaine qui fabrique et commercialise un dispositif de détection de matériel informatique qui prend en charge les mouvements des mains et des doigts en entrée, analogue à une souris , mais ne nécessitant pas de contact avec la main.
Vidéo de démonstration RedOhm :
Vidéo Youtube :
![]()
Mise à jour le 25/12/2019 : Les cartes EZ-B V4 et Z-B IoTiny permettent de contrôler et commander un robot ou autre application de votre choix pilotée par PC via une liaison Wifi. Il suffit d’utiliser une plateforme de base ou de construire vous-même un robot de base et d’ajouter la carte EZ-B. Elle est livrée avec son socle d’alimentation.
.
Mise à jour le 04/10/2019 : Le nouveau LIDAR-Lite possède les mêmes spécifications que le capteur d’origine : Capacité de portée jusqu’à 40 mètres avec une résolution de 1 cm.
Mise à jour le 30/03/2017
Les roues mecanum permettent à un véhicule de se diriger dans toutes les directions: aussi bien sur le côté que vers l’avant et l’arrière. Ces roues ont été inventées par le suédois Bengt Ilon en 1973, alors employé par la société Mecanum AB.
Les mouvements possibles sont:
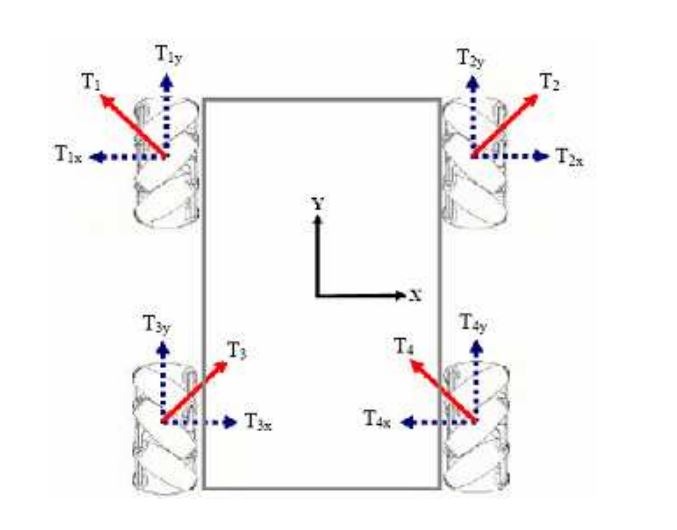
Principe de déplacement de la roue Mecanum
Principe de déplacement de la roue Mecanum – 01
Ces mouvements peuvent être combinés en étant réalisés simultanément.Voici quelques vidéos glanées sur le net :
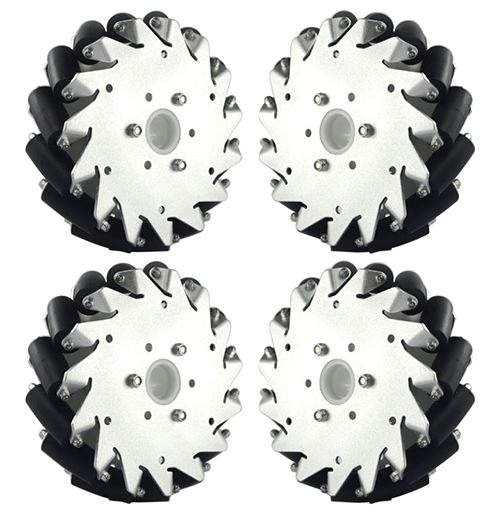
Le Jeu de roues Mecanum en aluminium de 152 mm (2 x droite, 2 x gauche) comprend 4 pièces : 2 roues droites et 2 roues gauches. Une droite et une gauche peuvent être assemblées de chaque côté de votre robot. Chaque roue est reliée à son propre moteur indépendant et entraînée de façon indépendante. Chacune des quatre roues comprend une série de rouleaux fixés sur sa circonférence, ces rouleaux ont un axe de rotation de 45° par rapport au plan parallèle à l’axe de rotation de la roue. La roue Mecanum utilise une forme de châssis standard et chaque roue est entraînée par un moteur différent, ce qui la rend capable de se déplacer dans n’importe quelle direction. Il n’est pas besoin de changer de direction pour que les roues tournent. Cette conception permet à la roue de propulser votre robot en avant, en arrière et directement latéralement.
Dimensions :
Ou les trouver : Robotshop

Le Kit Robot 4WD avec Roues Mecanum est une plate-forme mobile à 4 roues motrices à base de roues Mecanum. Il comprend deux roues gauches Mecanum ainsi que deux roues droites. Les quatre roues Mecanum sont raccordées séparément aux moteurs et contrôlées individuellement. Selon la direction et la vitesse de chaque roue, la plate-forme mobile peut aller vers l’avant, l’arrière, de côté et dans toute autre direction ou rotation souhaitées. Grâce à ce kit, vous pouvez construire votre propre robot omni-directionnel.
Ou les trouver : Robotshop
![]()
Mise a jour le 26/02/2016

La carte Arduino M0 Pro est basée sur un Atmel ARM Cortex SAMD21 cadencé à 48 MHz sous 32 bits. La version pro est équipée d’un second microcontrôleur EDBG (AT32UC3A4256) et d’un second port USB permettant le débogage et la programmation du SAMD21 via le logiciel Arduino. Cette carte permet d’obtenir de meilleures performances, une meilleure flexibilité que la UNO et permet l’initiation au développement sur une architecture 32 bits.
La carte Arduino M0 Pro dispose deux ports USB:
– un premier port micro-USB (Native) permet d’utiliser le M0 comme un périphérique USB (comme une souris ou un clavier connecté à un PC, hôte USB, port série via programmation) et autorise la programmation (non recommandé).
– un second port micro-USB (Programming) recommandé pour la programmation et le débogage donnant accès au microcontrôleur principal SAMD21 via le microcontrôleur EDBG. Permet de reprogrammer le microcontrôleur principal en cas de plantage.
Des connecteurs situés sur les bords extérieurs du circuit imprimé permettent d’enficher une série de modules complémentaires. L’Arduino M0 pro se programme avec le logiciel Arduino 1.7.8 ou supérieur disponible sur le site Arduino.
Les broches d’alimentation sont les suivants:
Les entrées sorties :
Chacune des 14 E / S numériques sur le M0 Pro peuvent être utilisé comme une entrée ou une sortie, en utilisant pinMode (), digitalWrite (), et digitalRead (). Ils fonctionnent en 3,3 volts. Pour les broches d’E / S et une résistance de pull-up interne (déconnecté par défaut) de 20-60 kOhms. En outre, certaines broches ont des fonctions spécialisées:
Note1 Les broches 4 et 10 ne peut pas être utilisé en même temps que PWM.
Note2 Les broches 5 et 12 ne peut pas être utilisé en même temps que PWM.
La programmation de la carte :
Remarques:
– contrairement aux autres cartes Arduino, les entrées/sorties fonctionnent sous 3,3 Vcc, l’utilisation de 5 Vcc en entrée ou en sortie n’est pas possible. Une tension supérieure endommagera la carte.
– l’intensité maximale de sortie par E/S est de 7 mA.
Caractéristiques:
Alimentation:
– via port USB ou
– 6 à 15 Vcc sur connecteur alim
Microcontrôleur: ATSAMD21G18 ARM Cortex M0 32 bits
Microcontrôleur EDBG (Atmel’s Embedded Debugger): AT32UC3A4256
Mémoire flash: 256 kb (4 kB sont utilisés pour le bootloader)
Mémoire SRAM: 32 kB
Mémoire EEPROM: aucune disponible par défaut, possibilité d’émulation dans la SRAM
Tension de sortie: 3,3 Vcc
14 broches d’E/S dont 12 PWM et série
6 entrées analogiques 12 bits ADC
1 sortie analogique 10 bit DAC
1 broche d’interruption (D2)
Intensité par E/S: 7 mA
Cadencement: 48 MHz
Bus série, I2C et SPI
2 x Fiche micro-USB:
– 1 x usb programmation
– 1 x usb classique
Fiche d’alimentation: 5,5 x 2,1 mm
Dimensions: 69 x 53 x 10 mm
Référence Arduino: A000111
Version d’origine fabriquée en Italie.
Site officiel Arduino: www.arduino.org
![]()