–
Mise à jour 16/06/2019 . Retrouvez sur cette page l’ensemble des articles concernant le robot Maya ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )

Mise à jour 16/06/2019 . Retrouvez sur cette page l’ensemble des articles concernant le robot Maya ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
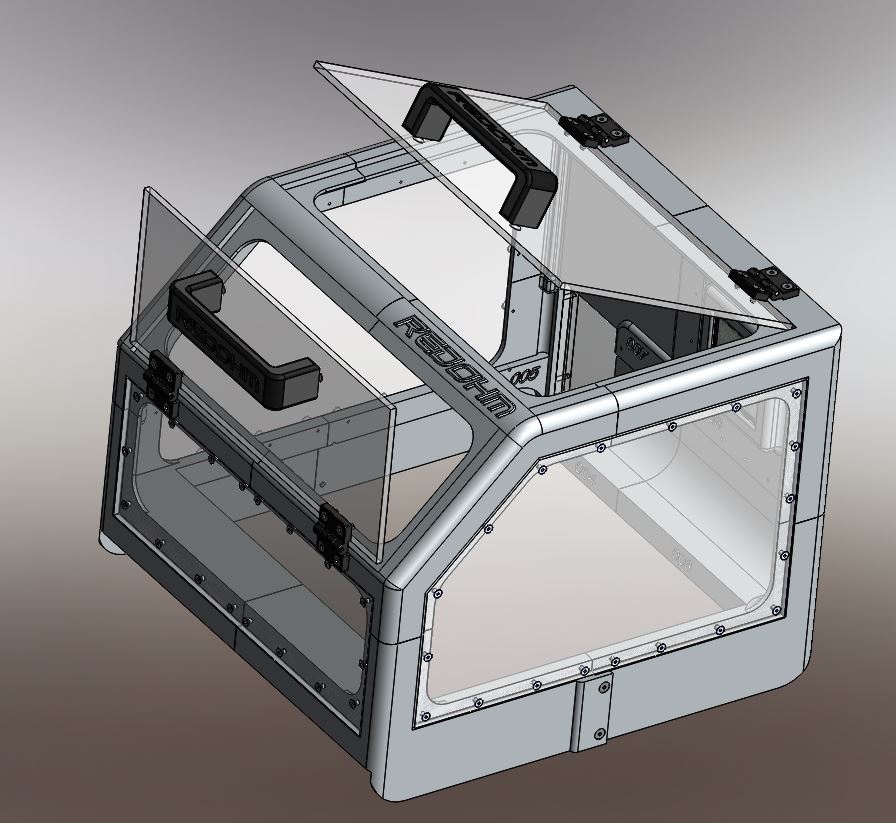
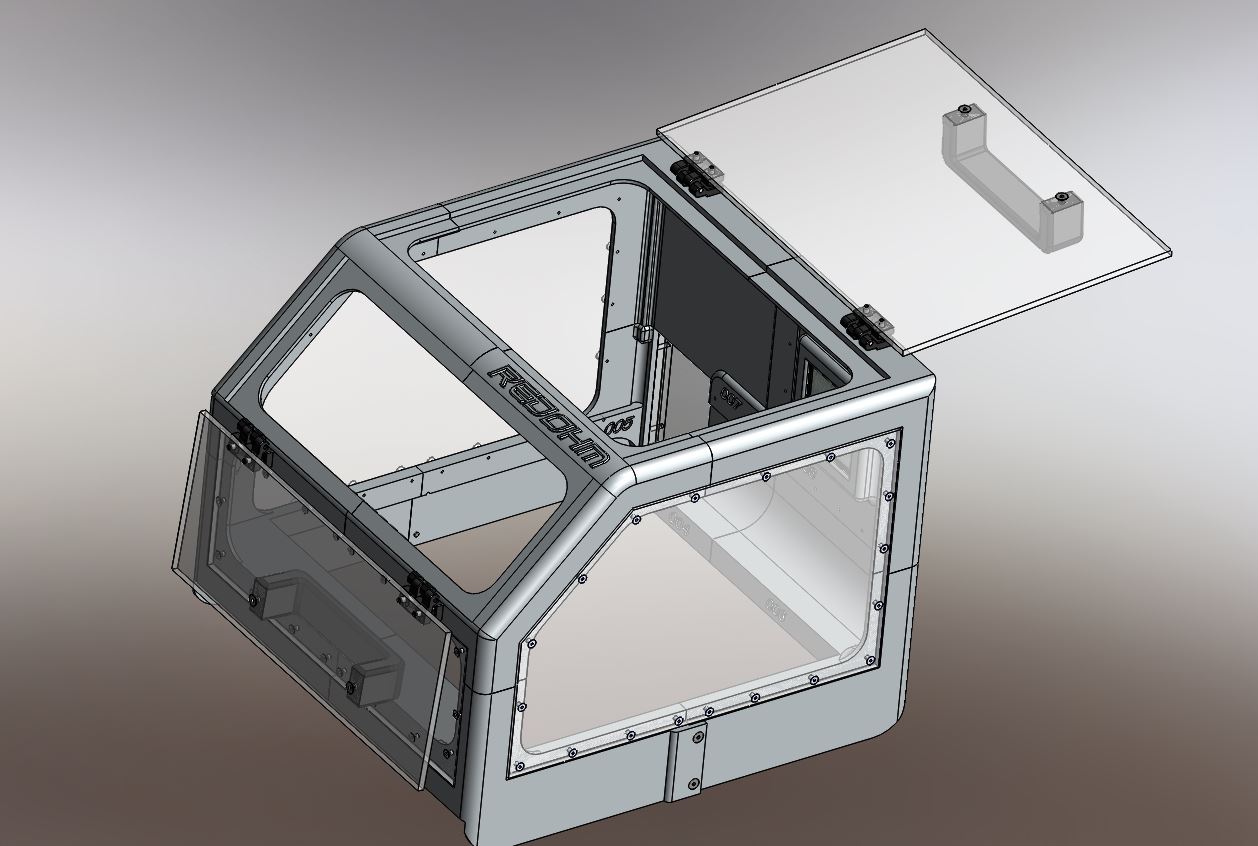
Mise à jour le 08/01/2018.Grâce a ce capot pour l’imprimante Zortrax M200 , il est beaucoup plus facile d’imprimer des matières comme l’ABS qui ont tendance à subir le choc thermique entre la température environnante et la chaleur du plateau , de plus il saura maintenir la température intérieure de votre imprimante 3D. Il protégera vos impressions des aléas extérieurs comme par exemple les courants d’air, poussières ect..
Capot pour Zortrax M200 – RedOhm
![]()
Présentation du capot pour Zortrax M200 |
Grâce a ce capot , il est beaucoup plus facile d’imprimer des matières comme l’ABS qui ont tendance à subir le choc thermique entre la température environnante et la chaleur du plateau , de plus il saura maintenir la température intérieure de votre imprimante 3D. Il protégera vos impressions des aléas extérieurs comme par exemple les courants d’air, poussières ect..
Sécurité :
Dans un contexte public comme les fablab par exemple, ce capot permet une utilisation sécurisée et sans risque et de plus atténuera les éventuelles nuisances sonores .
Le capot est muni filtre contre les micro-particules.
A savoir sur les risques des micro-particule
Les chercheurs ont testé deux matériaux d’impression 3D différentes, l’ABS (acrylonitrile butadiene styrene) et le PLA (polylactic acid), pour voir combien de particules fines sont émises à chaque réalisation. Ils ont constaté que l’ABS émet 10 fois plus de particules que le PLA. L’étude met en garde contre les imprimantes d’entrée de gamme qui impriment à la fois en ABS et PLA. Elle prend l’exemple de la xxx xxxxx qui coûte 800 euros et de ses instructions liées à la sécurité. « Le PLA est un matériau sûr et non toxique, il n’y a pas de risques connus sur la santé lorsqu’il est utilisé dans les imprimantes 3D », peut-on lire sur la notice et d’ajouter « lors de l’impression avec l’ABS, il y a une odeur de plastique brûlé. C’est tout à fait normal, mais il peut aussi causer des maux de têtes, une irritation des voies respiratoires et des yeux pour les personnes sensibles ». Brent Stephens indique que plusieurs études ont montré que les fumées d’ABS étaient toxiques sur les souris et les rats.
Articles qui traite sur le sujet :
⇒ le monde informatique
⇒ Prévention du risque chimique Cnrs
⇒ Sciences et avenir : L’impression 3D est elle dangereuse pour la santé
| Retour au sommaire |
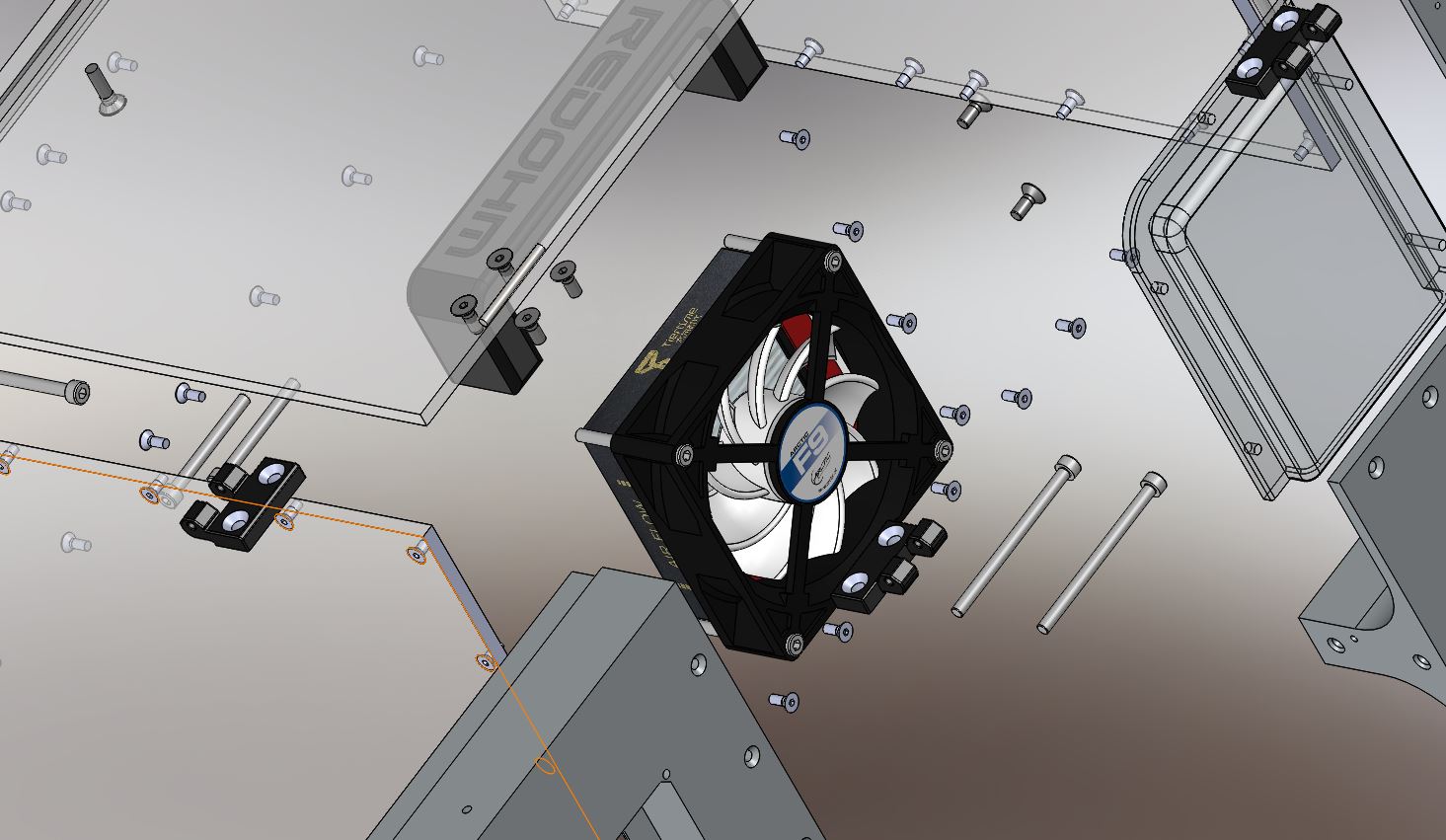
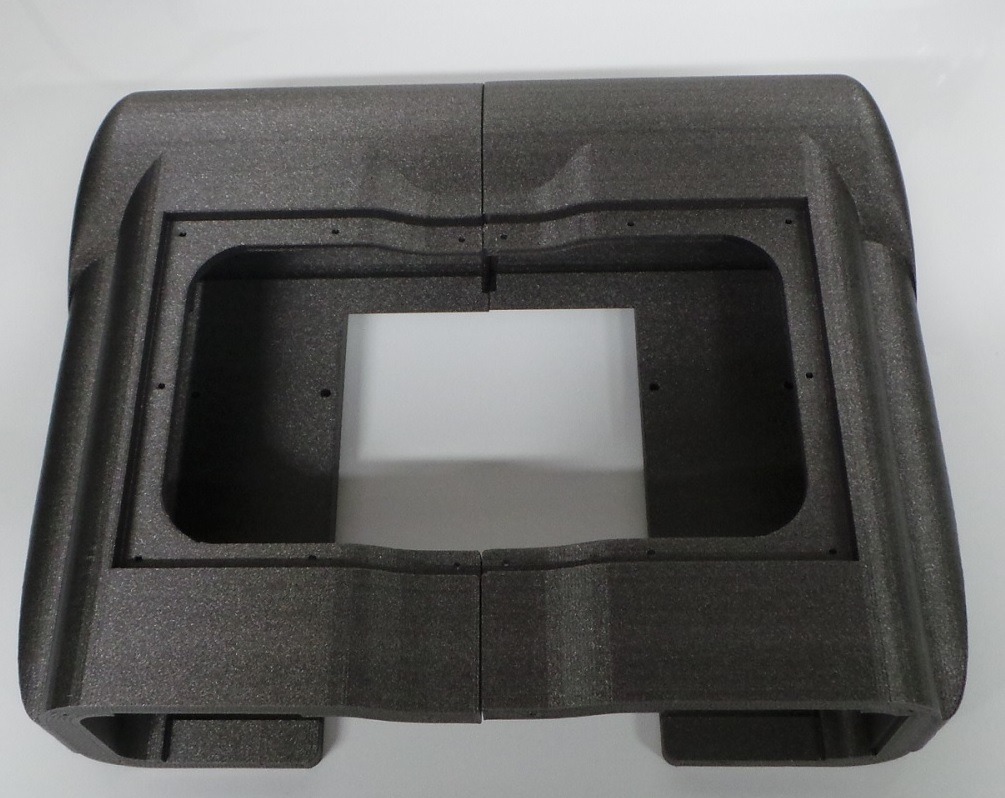
![]()
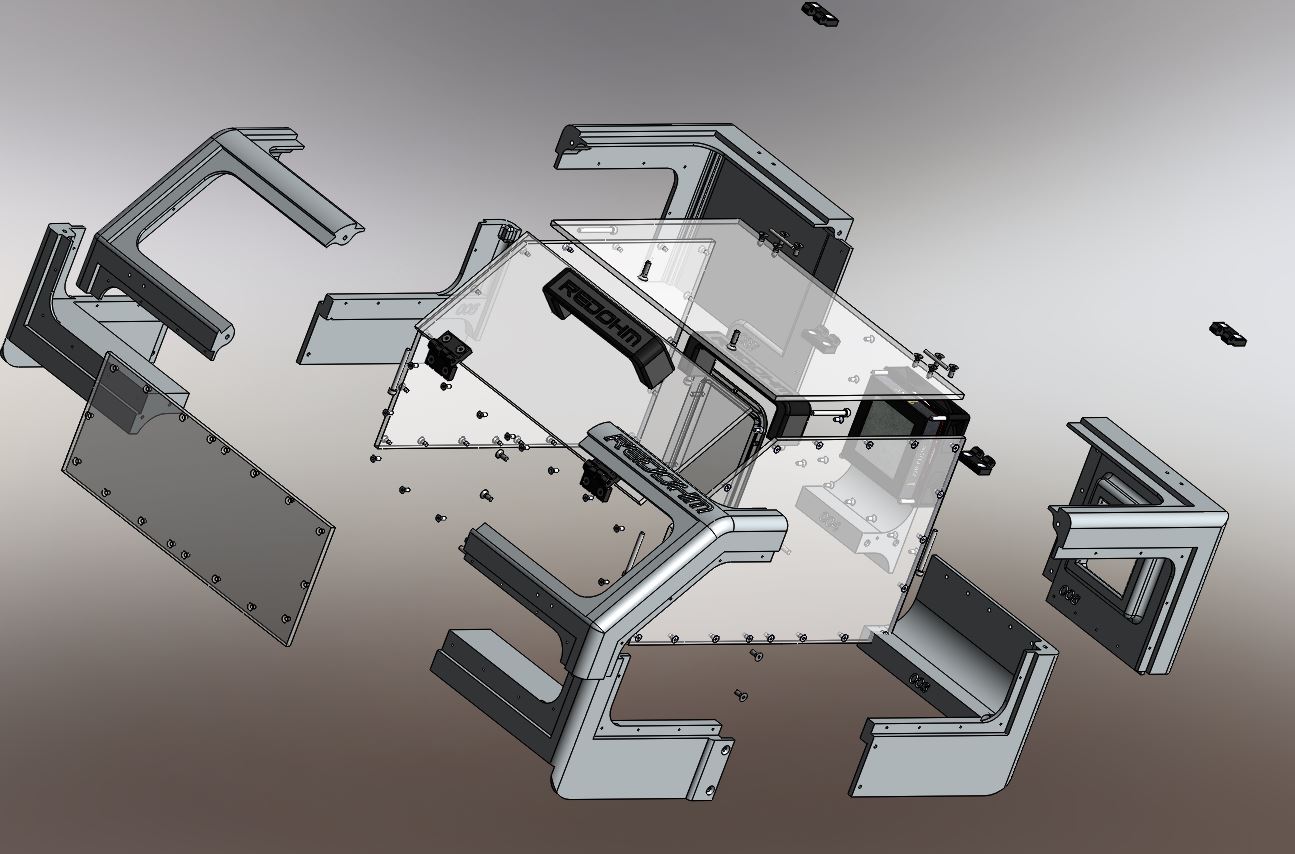
Vue éclatée du capot pour la Zortrax M200 |
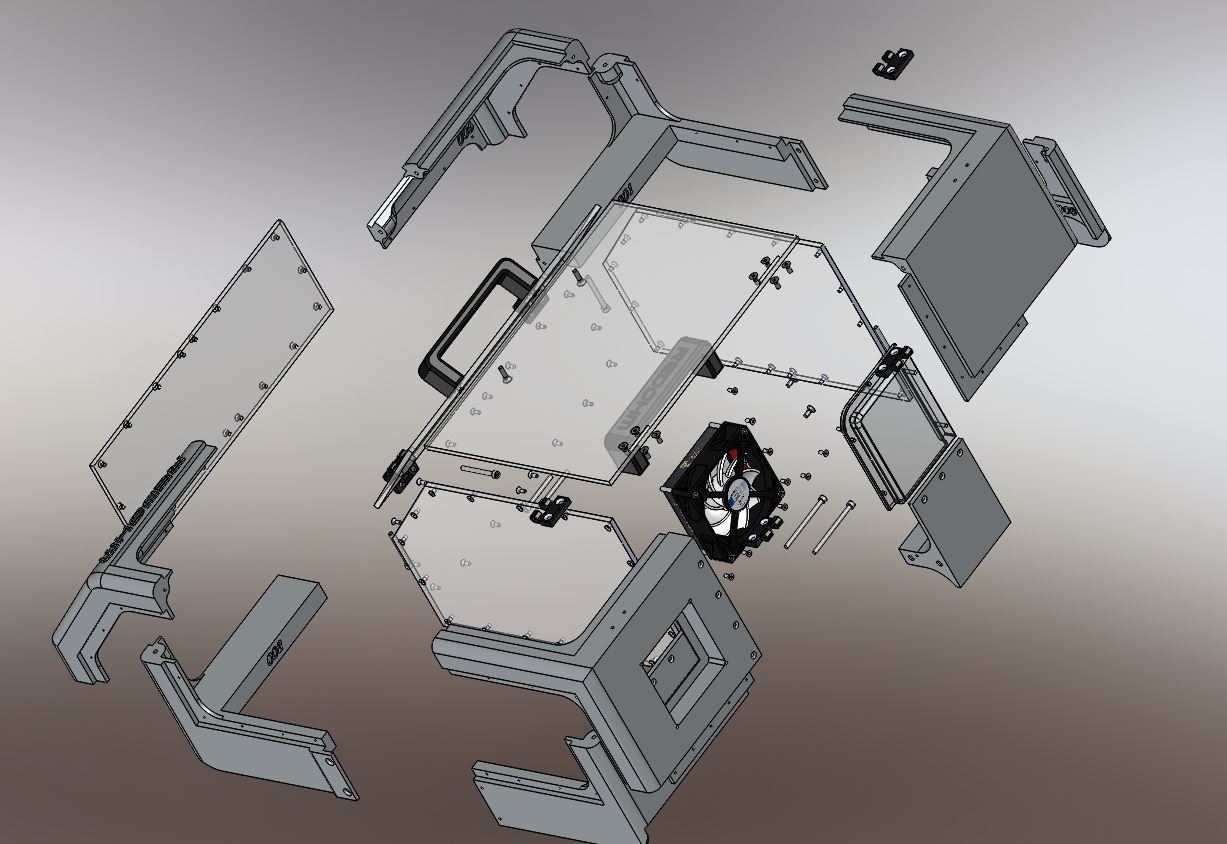
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 01
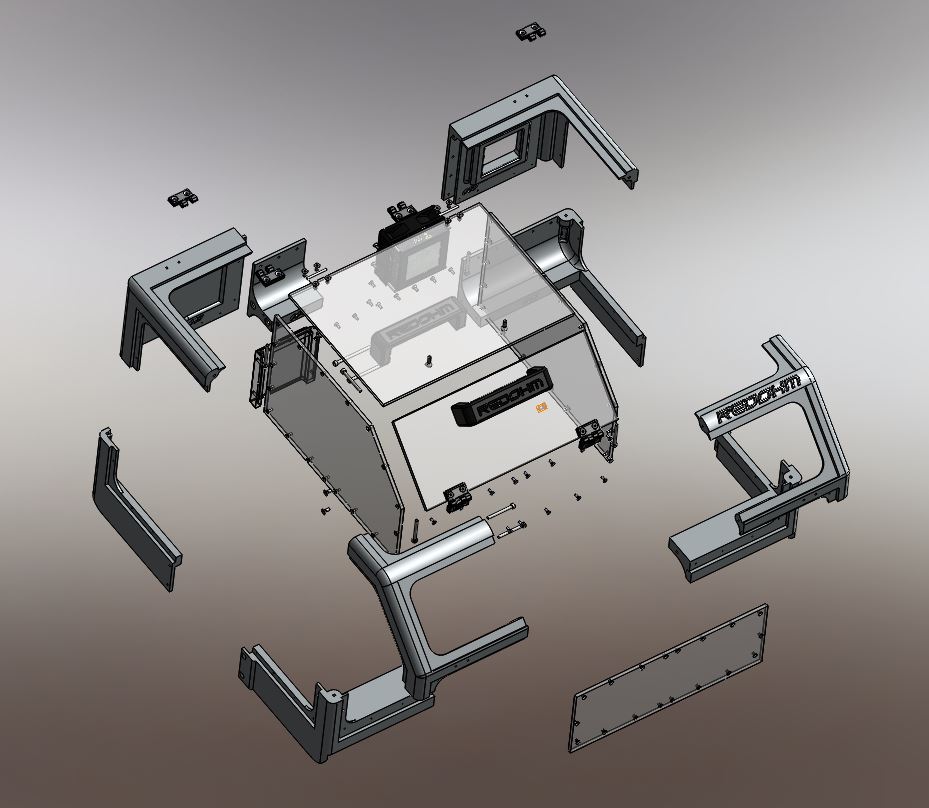
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 02
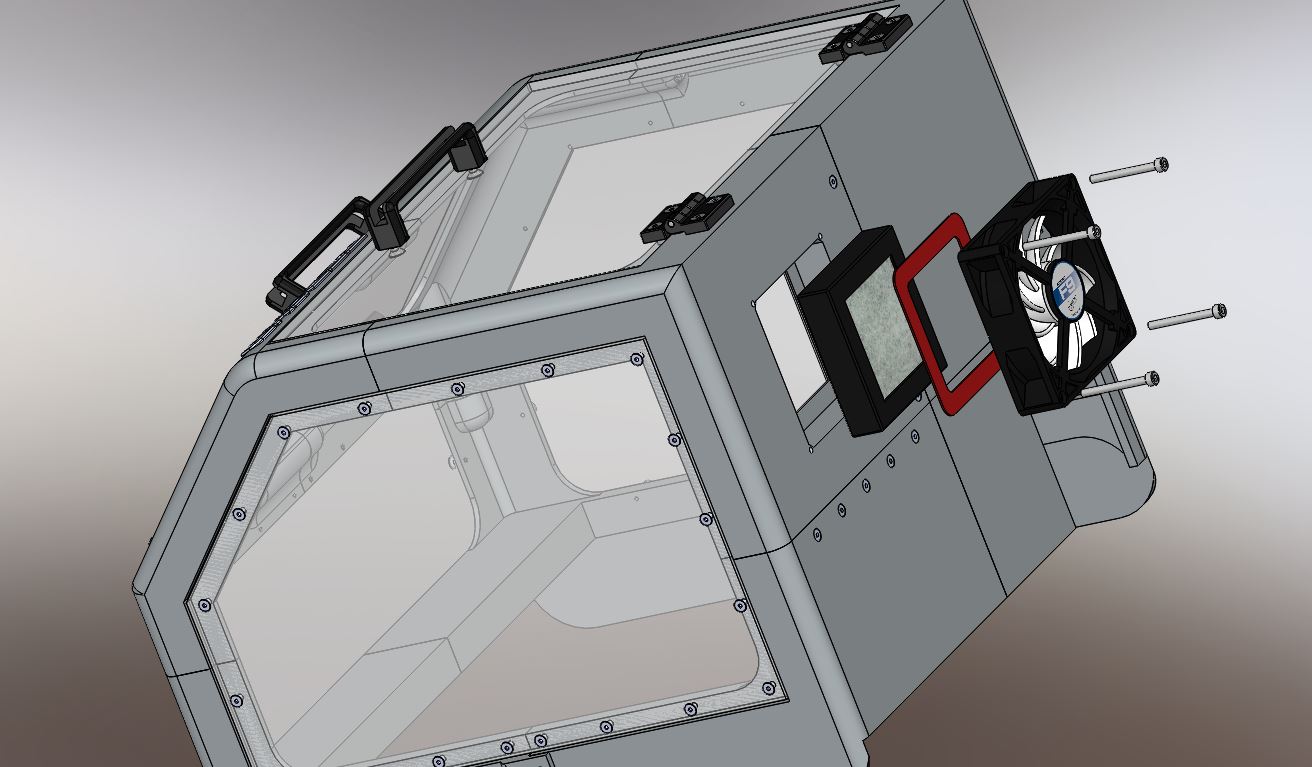
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 03
| Retour au sommaire |
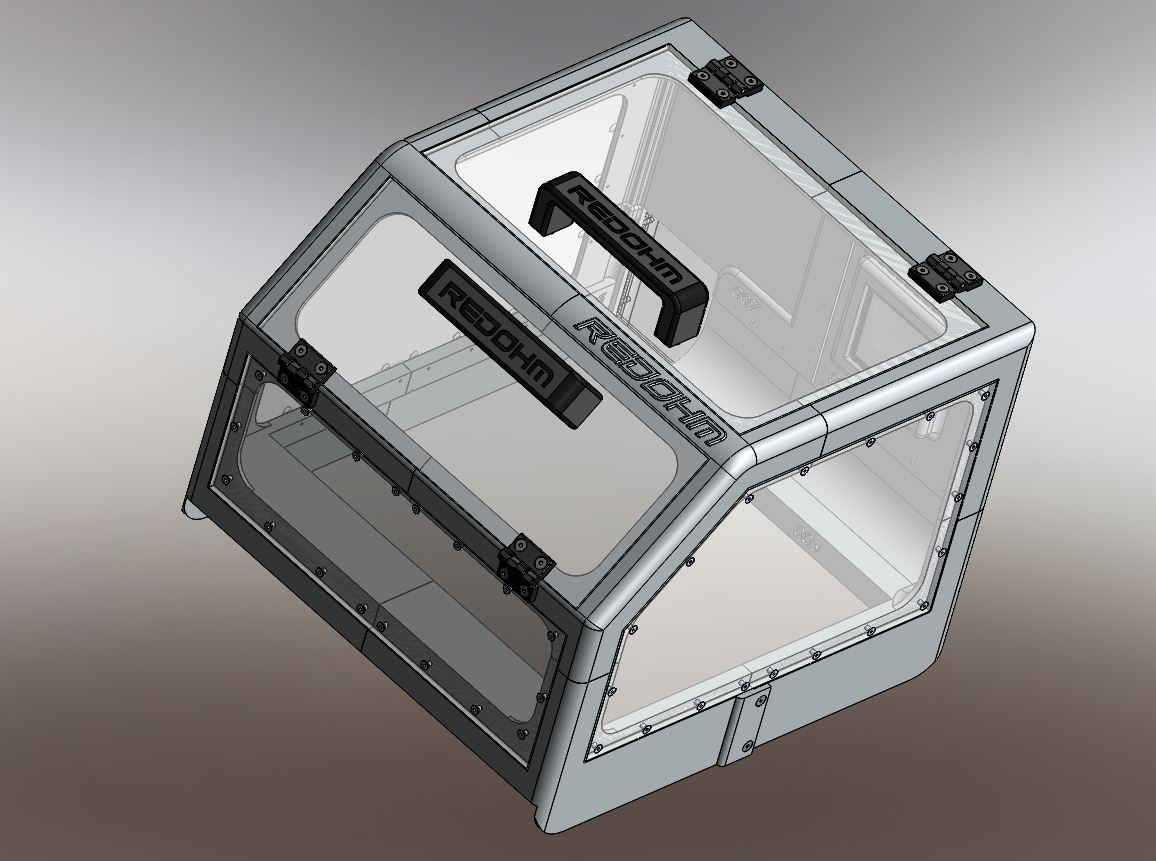
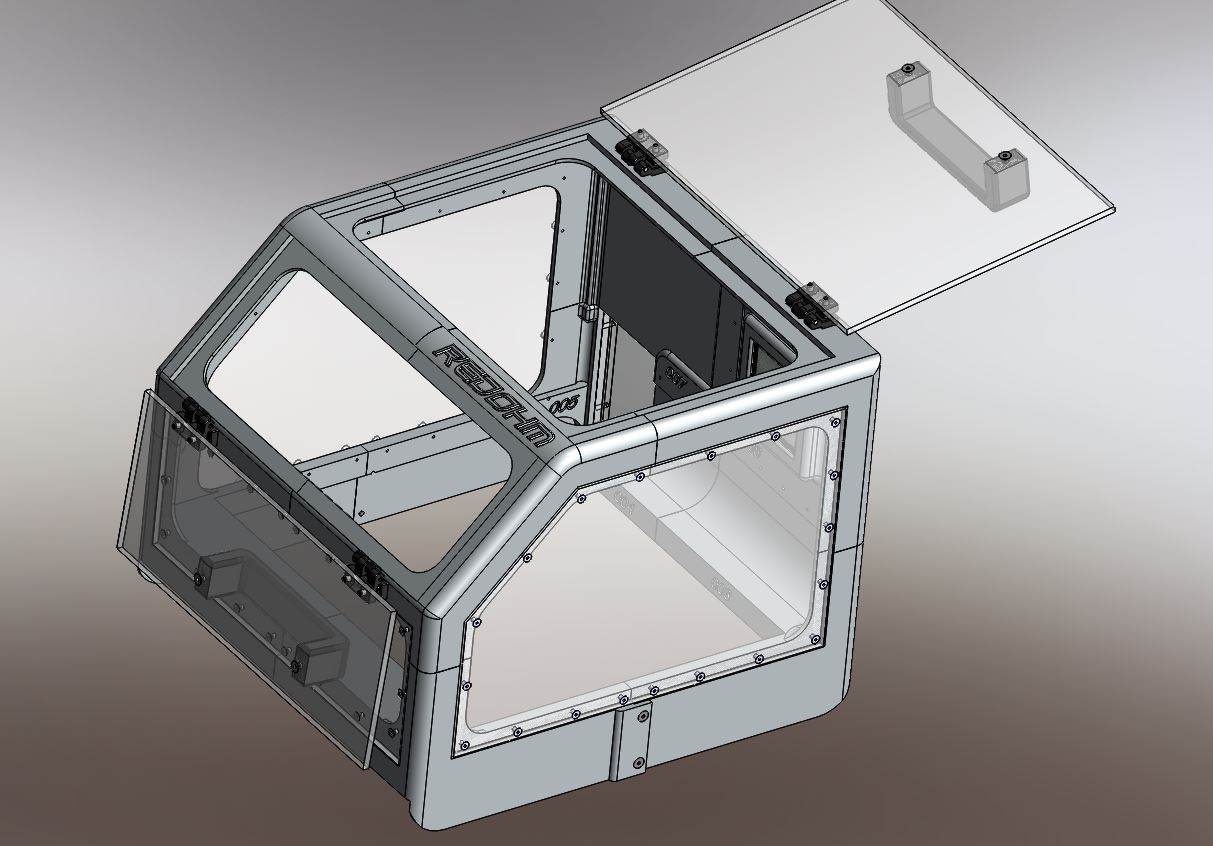
![]()
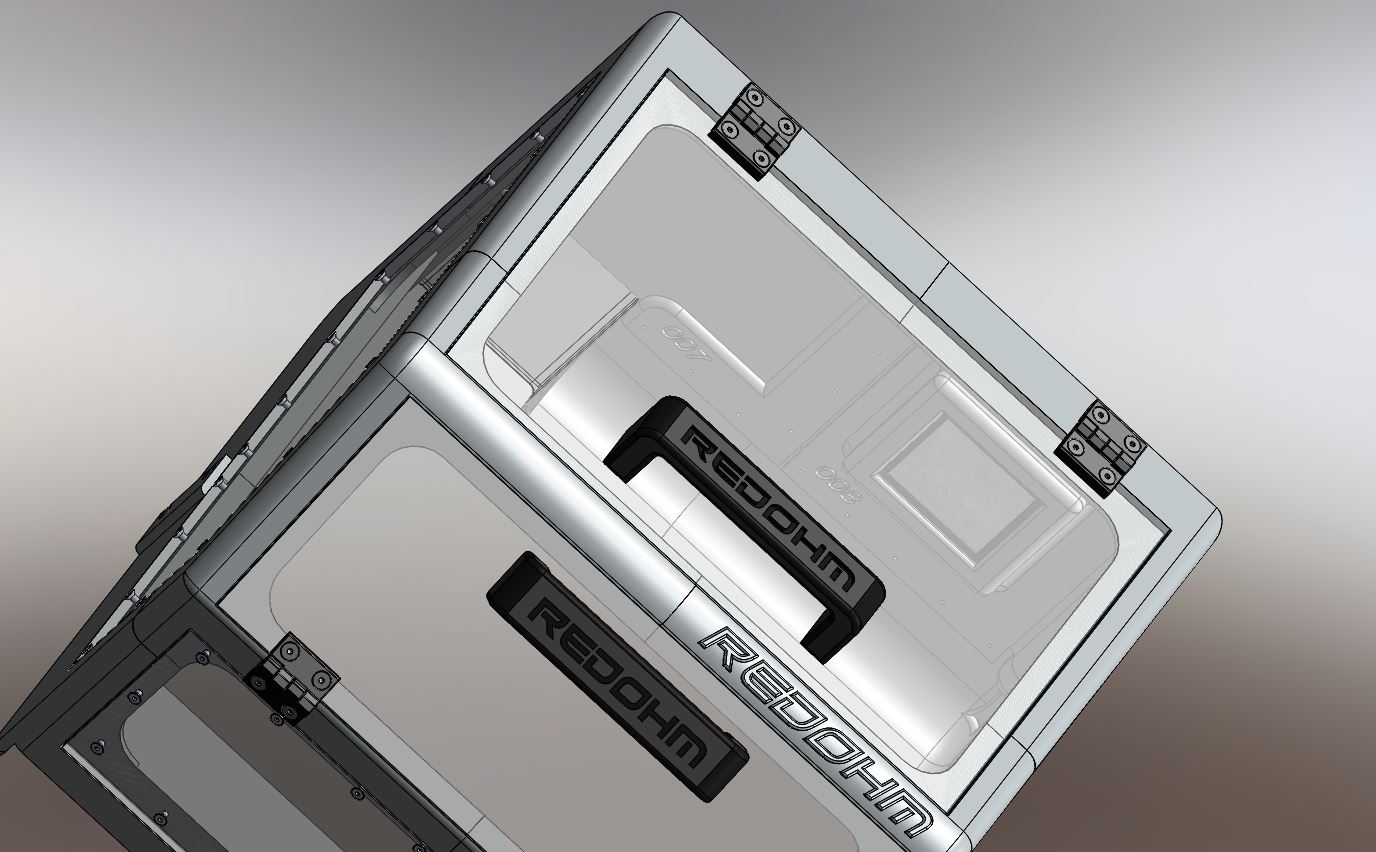
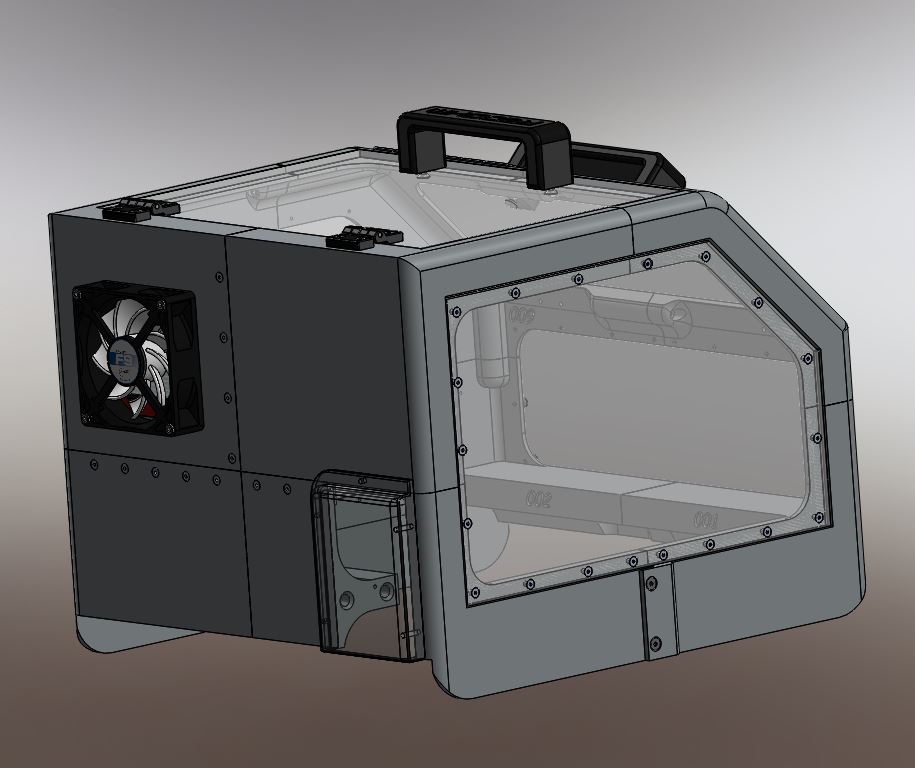
Différentes vue du capotage de l’imprimante Zortrax M200
|
| Retour au sommaire |
![]()
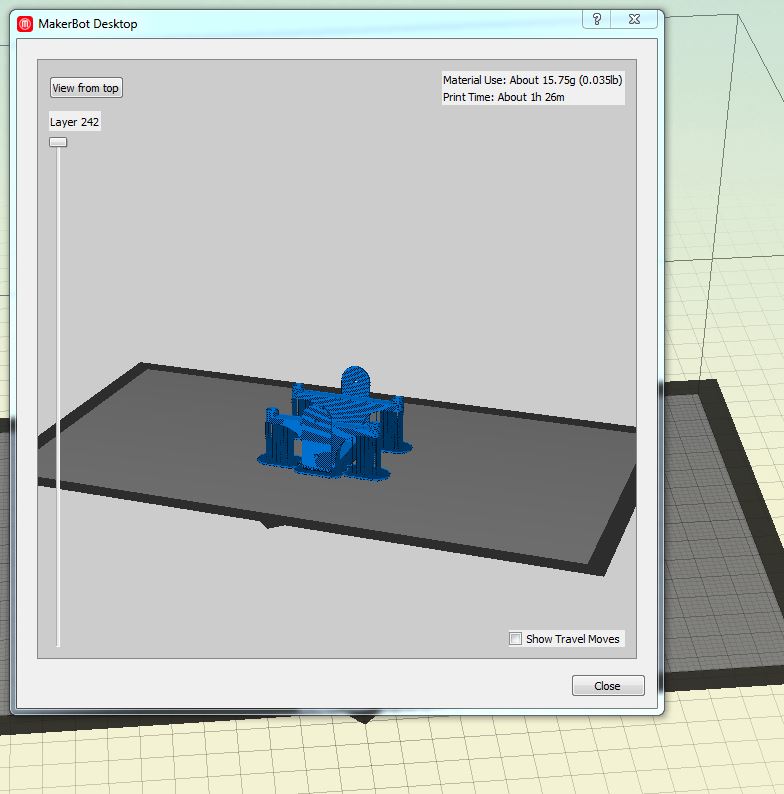
Impression avec du filament PLA standard
|
Caractéristique des pièces du capot Zortrax M200
|
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé |
| 001 | 199 | 183 | 140 | 383g | 31h |
| 002 | 199 | 183 | 140 | 359g | 31h |
| 003 | 193 | 179 | 140 | 418g | 36h30 |
| 004 | 55 | 84 | 110 | 125g | 11h |
| 005 | 143 | 140 | 140 | 137g | 13h20 |
| 006 | 185 | 179 | 158 | 462g | 46h |
| 007 | 195 | 195 | 172 | 725g | 71h |
| 008 | 195 | 179 | 172 | 775g | 73h |
| 009 | 185 | 179 | 156 | 476g | 72h |
| Poids total ⇒ | 3854g | ||||
Estimation du budget avec un prix du PLA à 39 € les 2kg
3,854g*19,5€ = 75,15€
| Retour au sommaire |
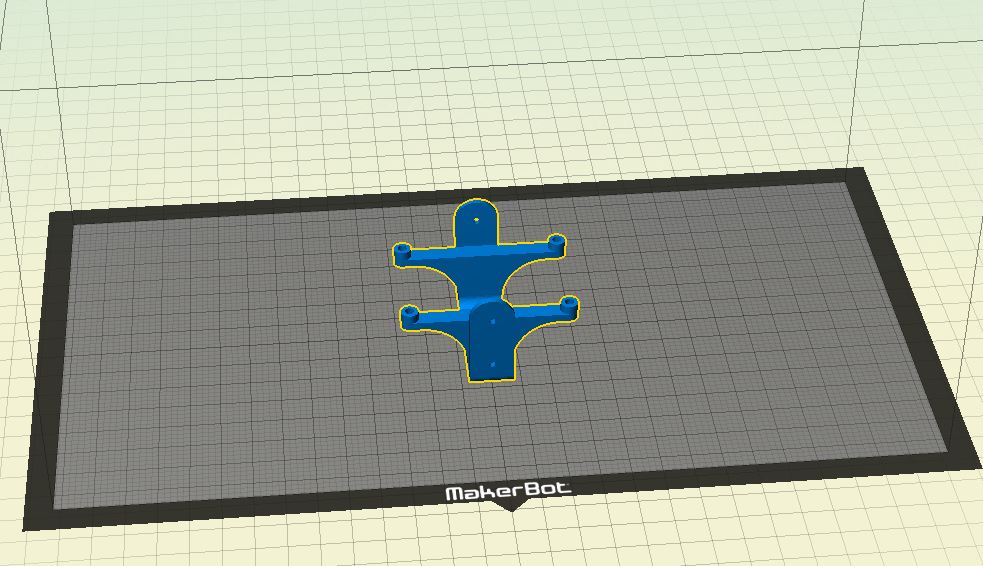
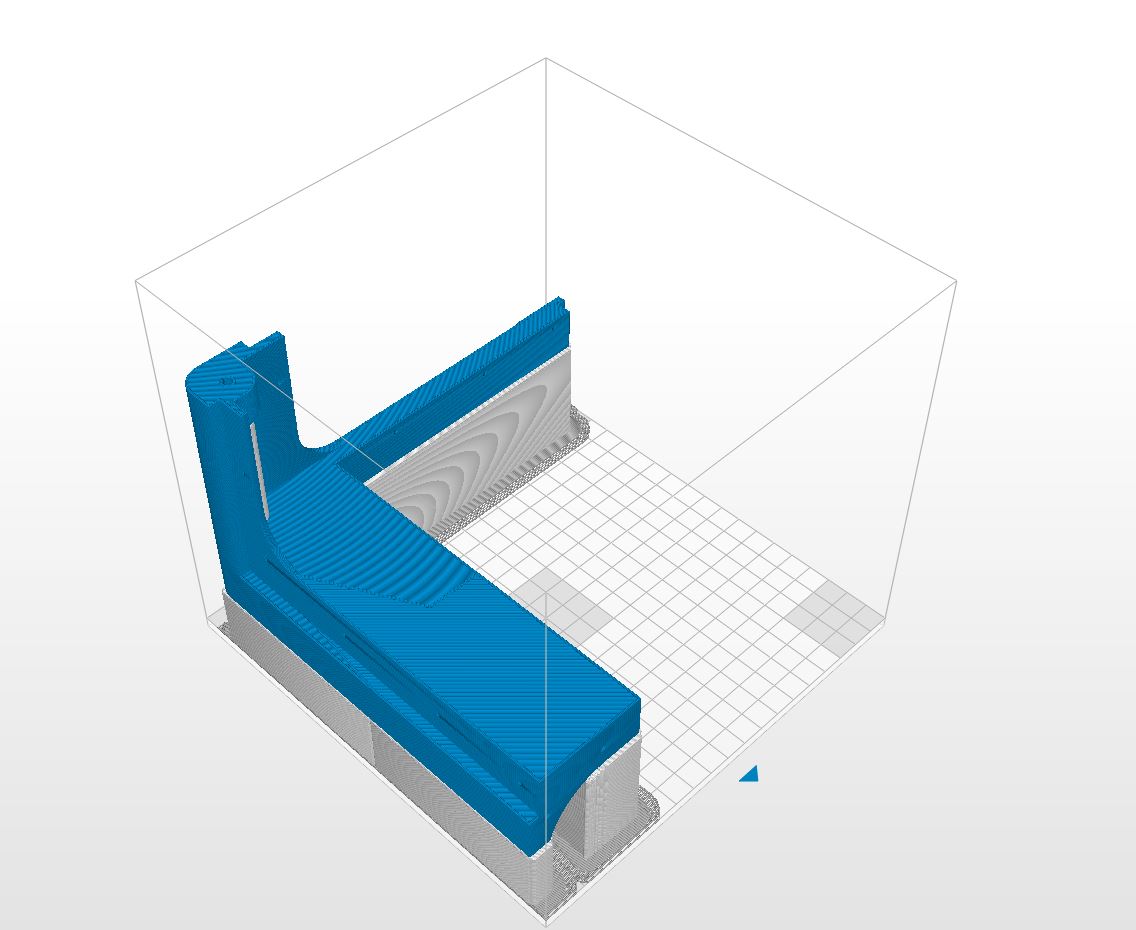
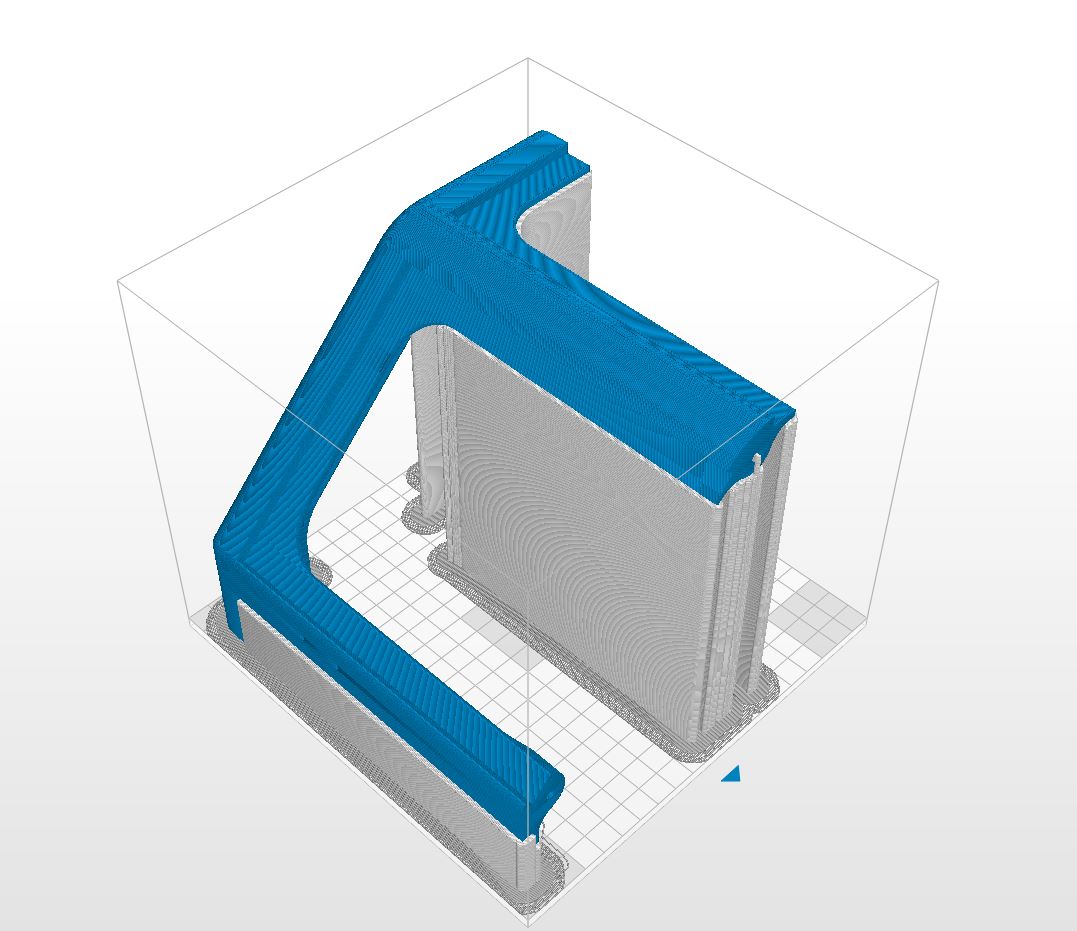
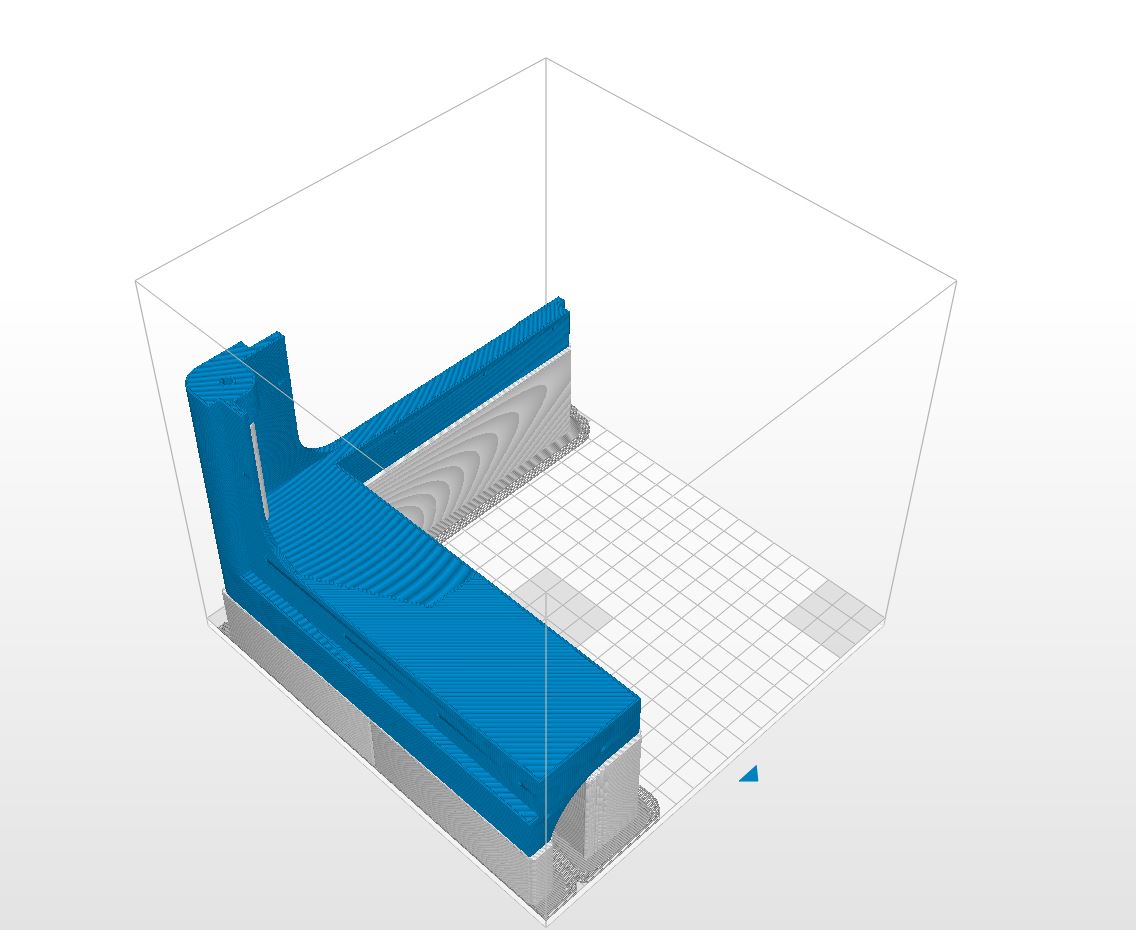
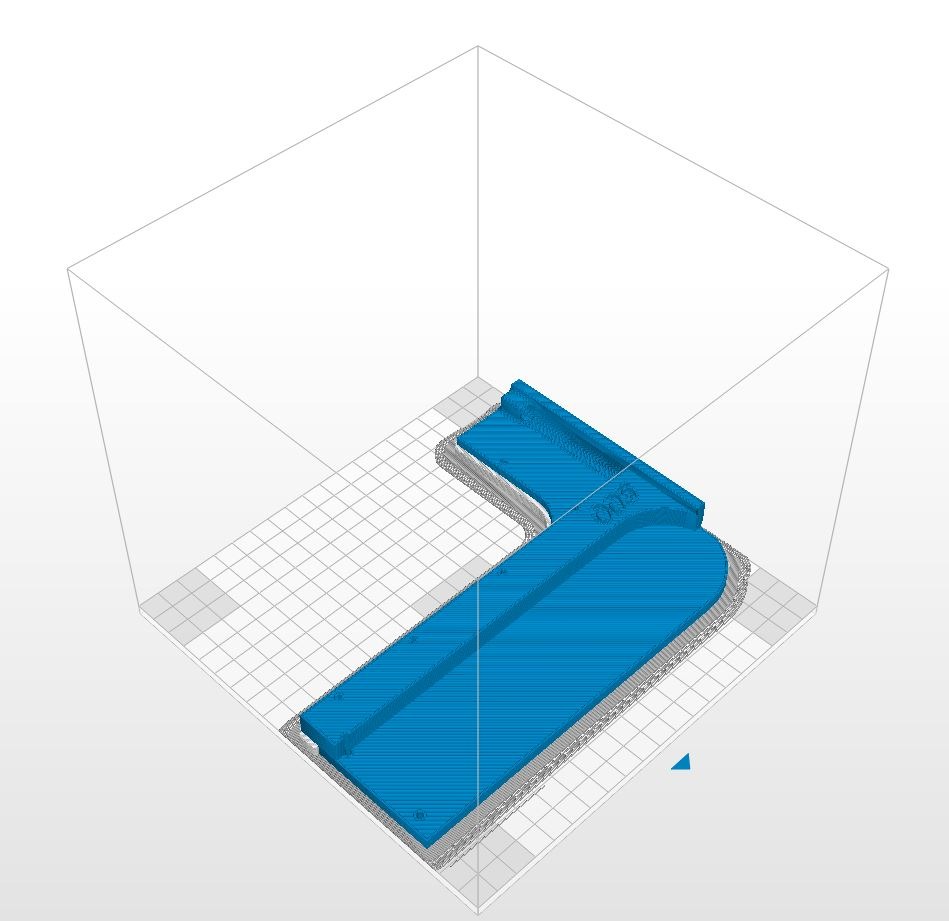
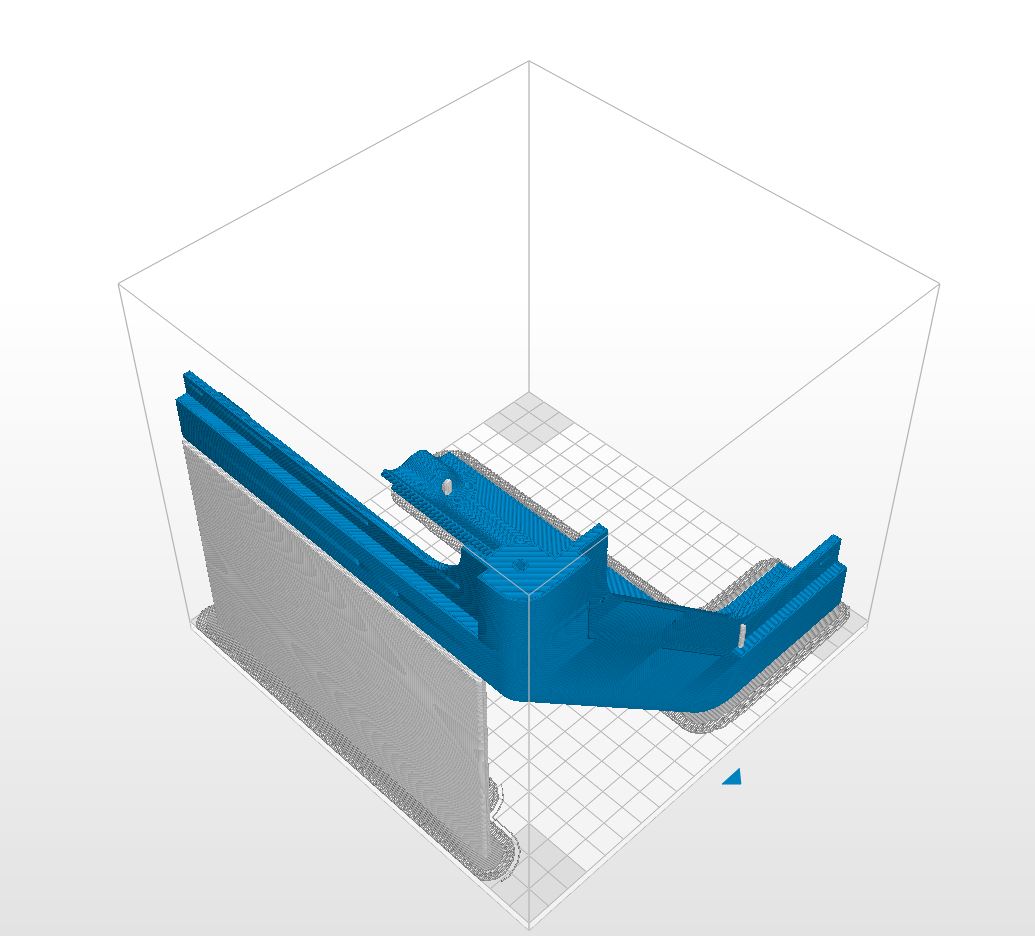
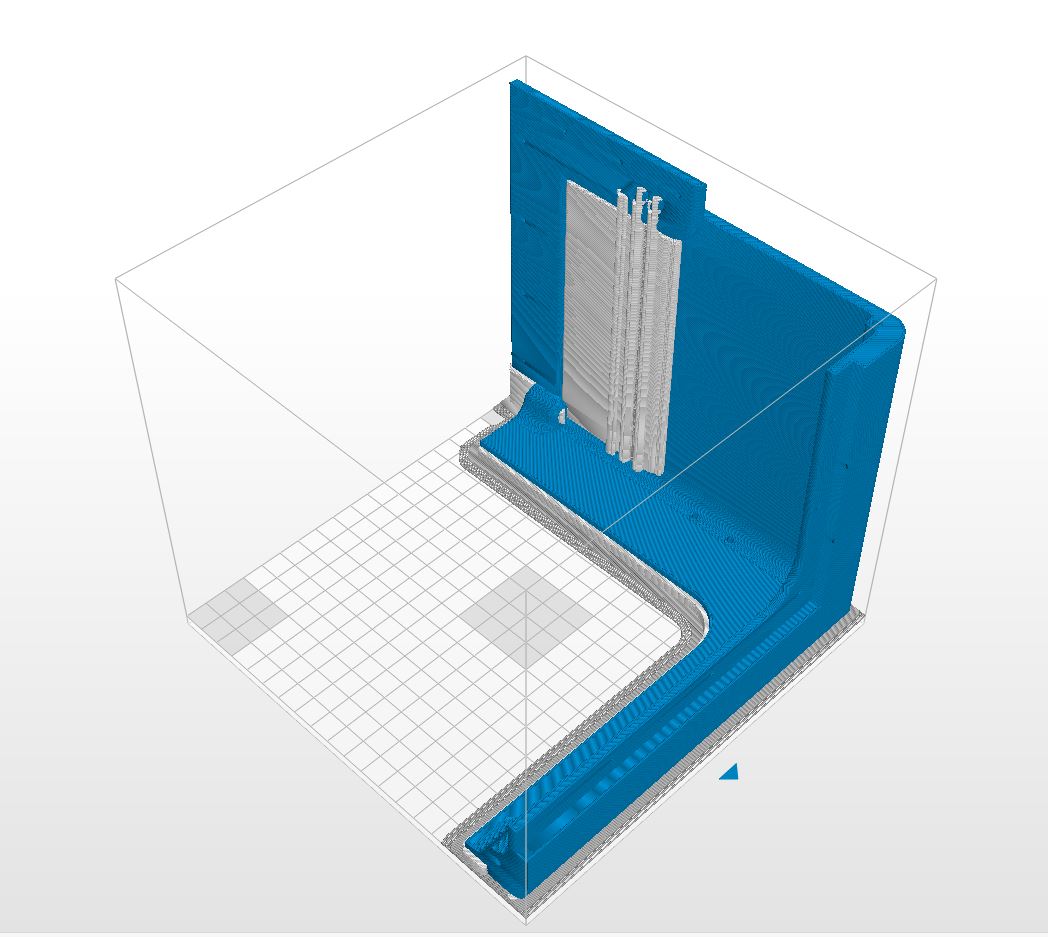
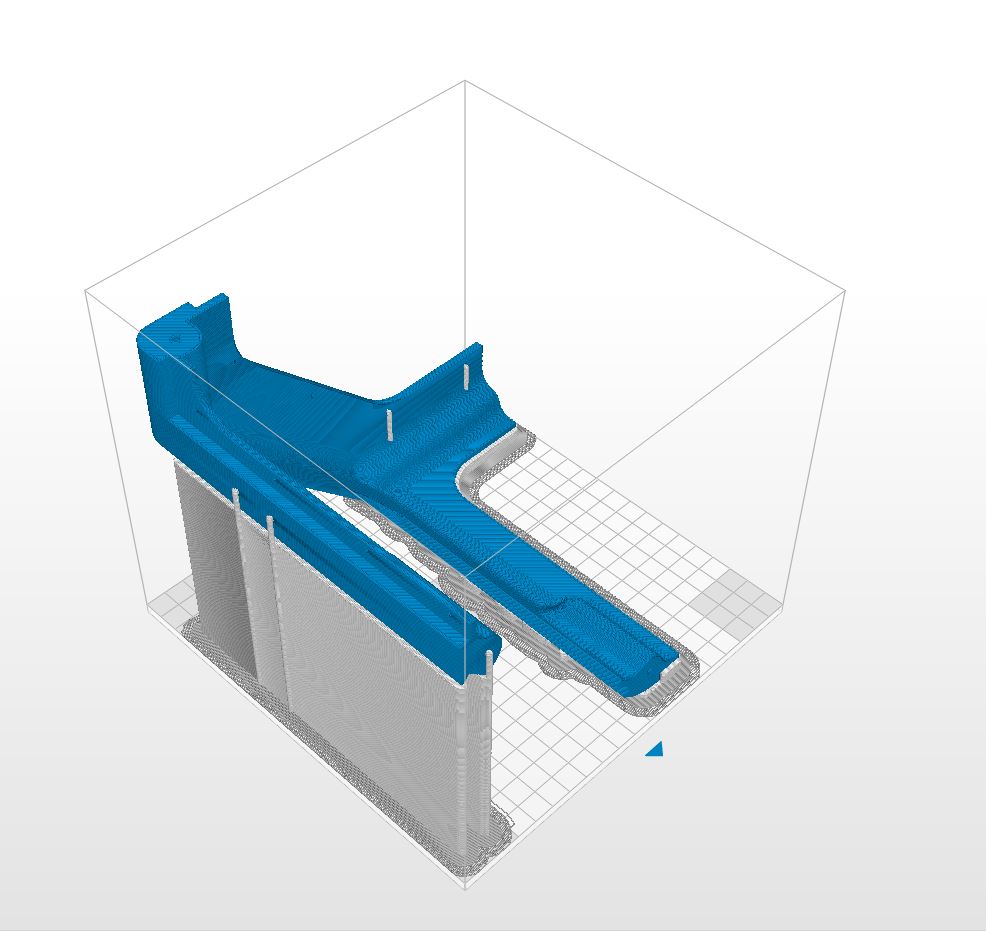
Positionnement conseillé des différentes pièces
|
Les pièces ont été positionnées pour avoir une qualité visuelle après montage la plus propre possible. Comme beaucoup de PLA , quand vous enlevez les supports ,il reste des petites parties blanches disgracieuses. Si vous voulez éviter de passer beaucoup de temps en post impression pour le nettoyage , il faut choisir ce type de positionnement.
|
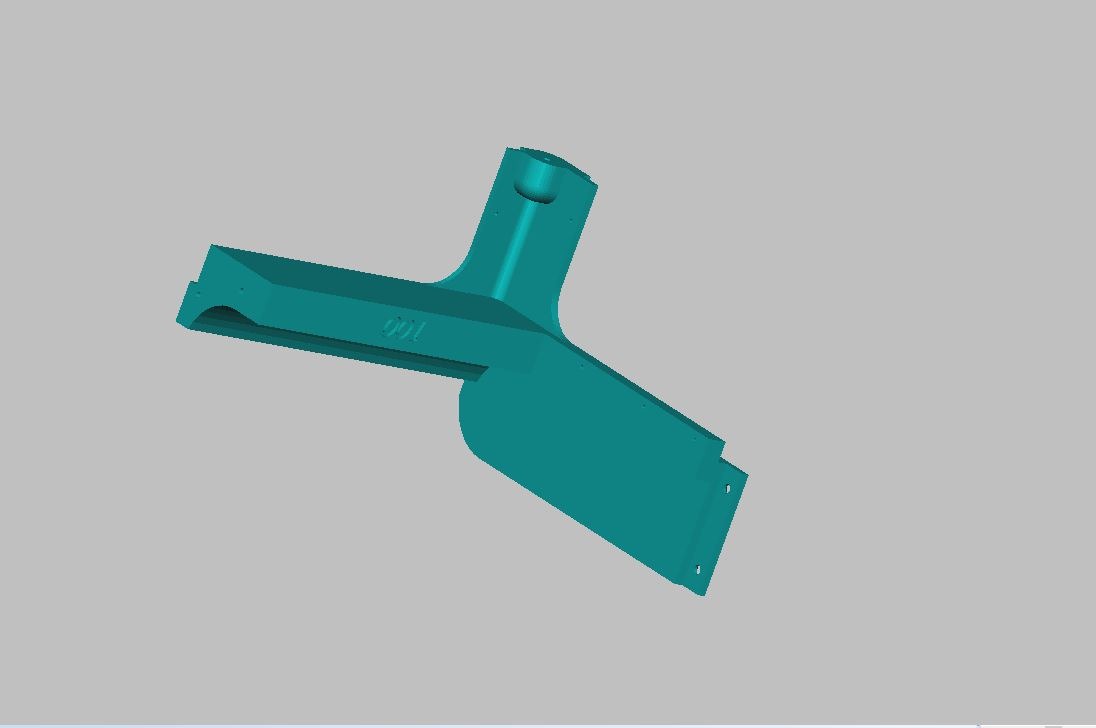
 Position pour la pièce 001 Zortrax – RedOhm |
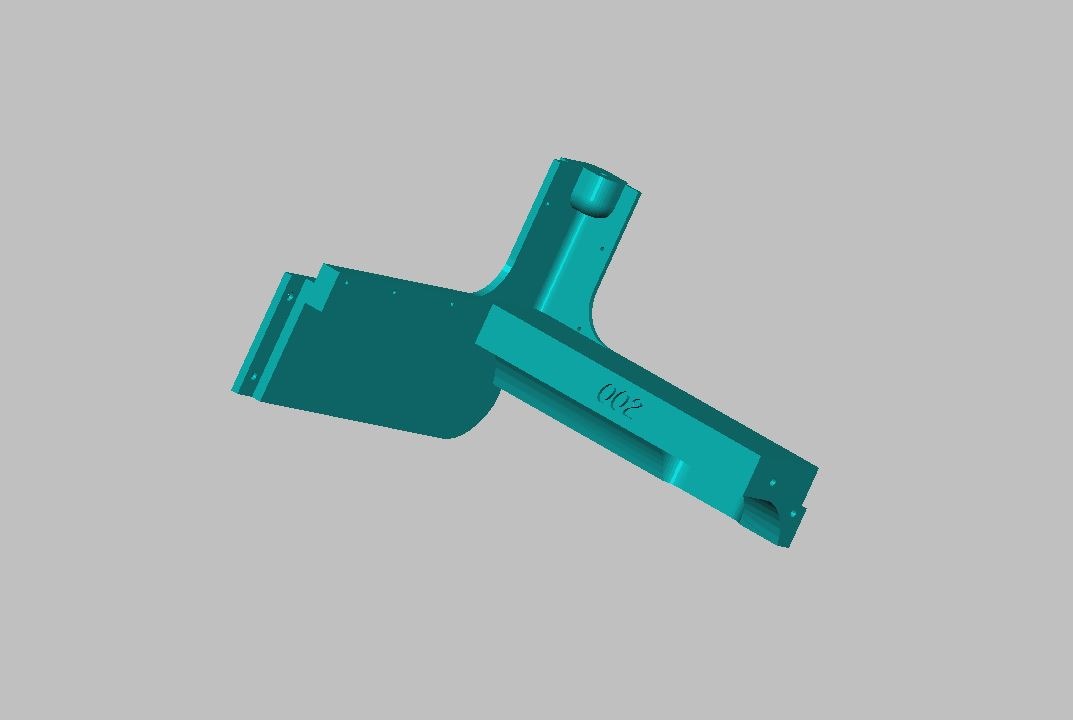
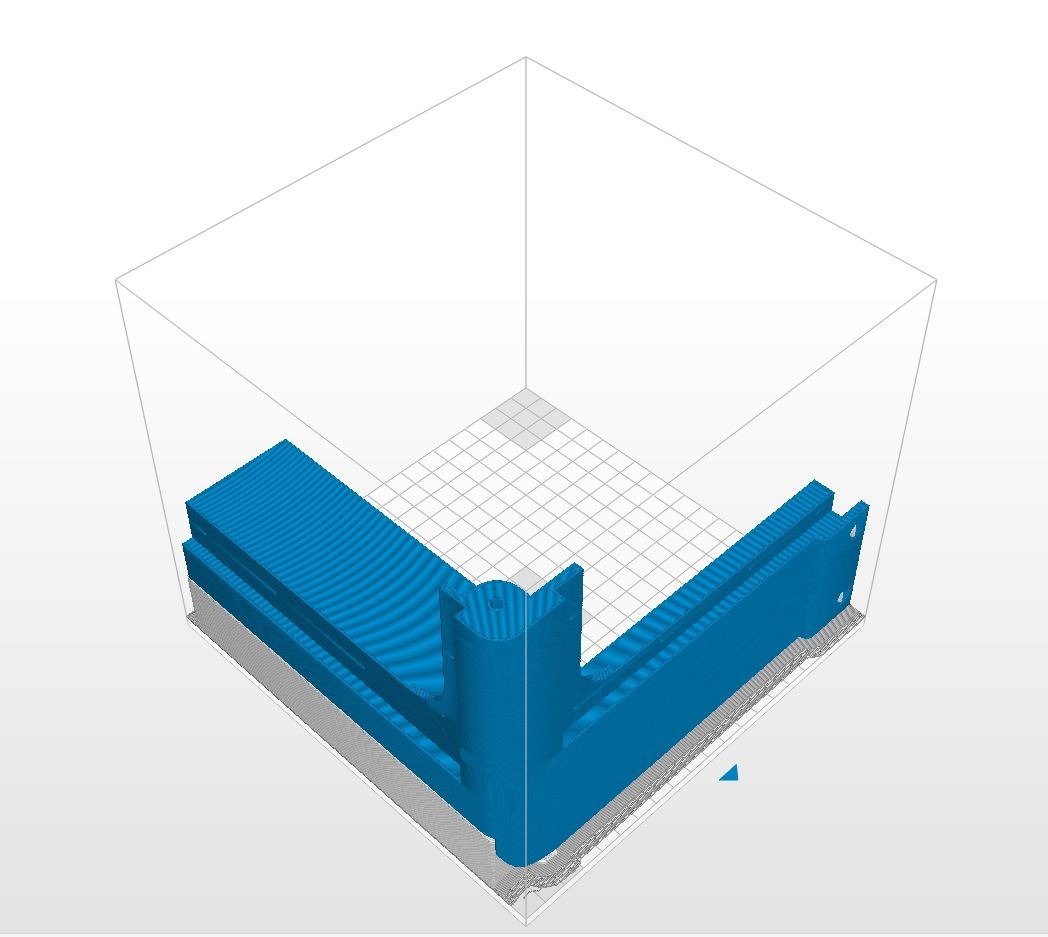 Position pour la pièce 002 Zortrax – RedOhm |
 Position pour la pièce 003 Zortrax – RedOhm |
|
 Position pour la pièce 004 Zortrax – RedOhm |
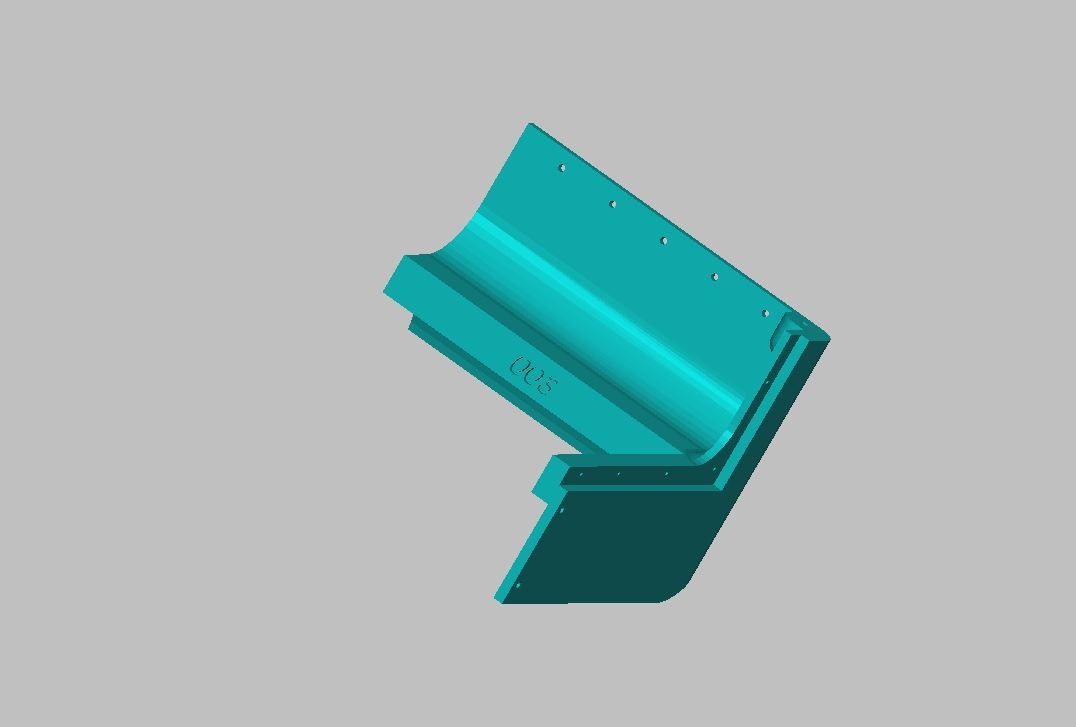
 Position pour la pièce 005 Zortrax – RedOhm |
 Position pour la pièce 006 Zortrax – RedOhm |
|
 Position pour la pièce 007 Zortrax – RedOhm |
 Position pour la pièce 008 Zortrax – RedOhm |
 Position pour la pièce 009 Zortrax – RedOhm |
| Retour au sommaire |
![]()
Impression avec du filament PLA Arianeplast |
Caractéristique des pièces du capot Zortrax M200
|
Attention : Attention seuls les types de filament suivant sont à utiliser dans ce cas bien précis, le PLA rouge , noir et gris métallisé 3D
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé | Gain matière |
| 001 | 199 | 183 | 140 | 383g | 31h | 0g |
| 002 | 199 | 183 | 140 | 359g | 31h | 0g |
| 003 | 193 | 179 | 140 | 418g | 36h30 | 0g |
| 004 | 55 | 84 | 110 | 110g | 8h30 | 15g |
| 005 | 143 | 140 | 140 | 118g | 8h54 | 19g |
| 006 | 185 | 179 | 158 | 251g | 24h | 211g |
| 007 | 195 | 195 | 172 | 297g | 30h | 428g |
| 008 | 195 | 179 | 172 | 369g | 34h | 406g |
| 009 | 185 | 179 | 256 | 266g | 26h | 204g |
| Poids total ⇒ | 2571g | |||||
Estimation du budget avec un prix du PLA type ArianePlast métallisée à 39 € les 2kg
3,854g*19,5€ = 50.13€
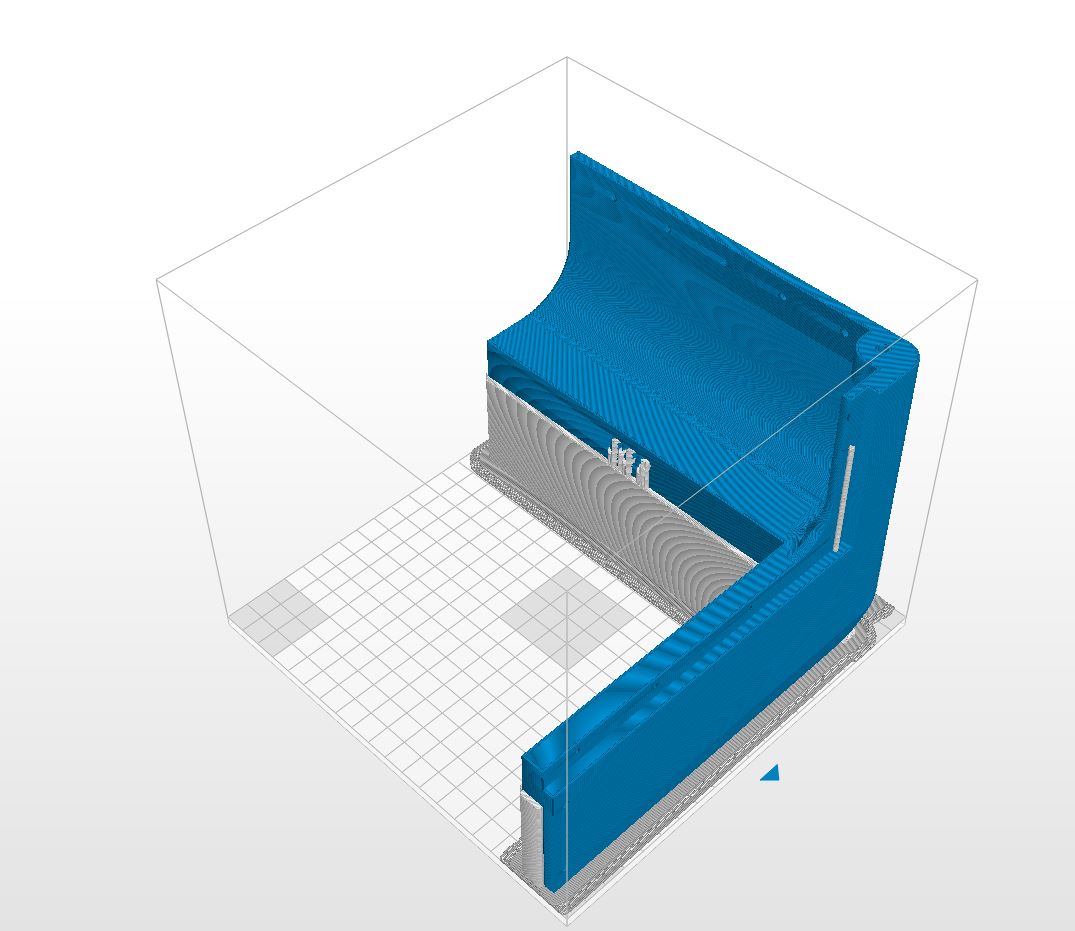
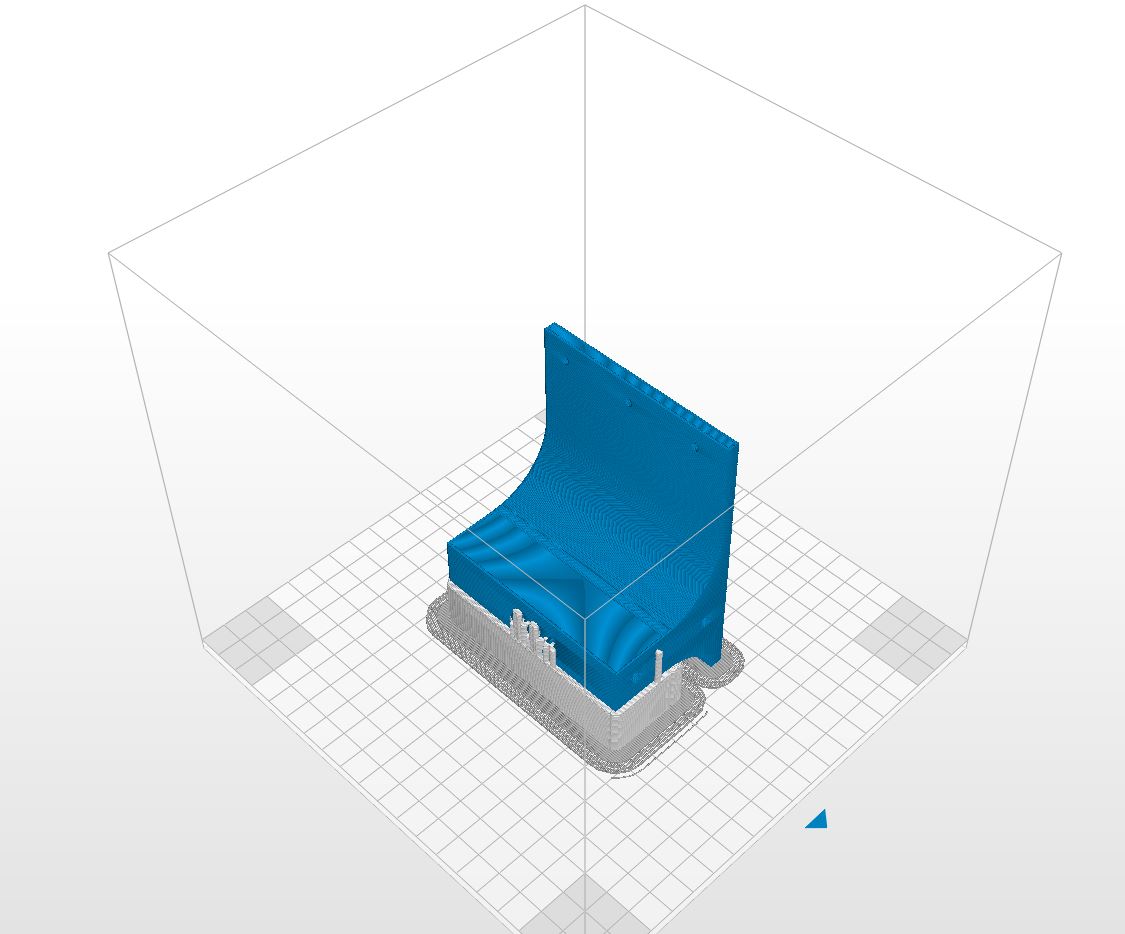
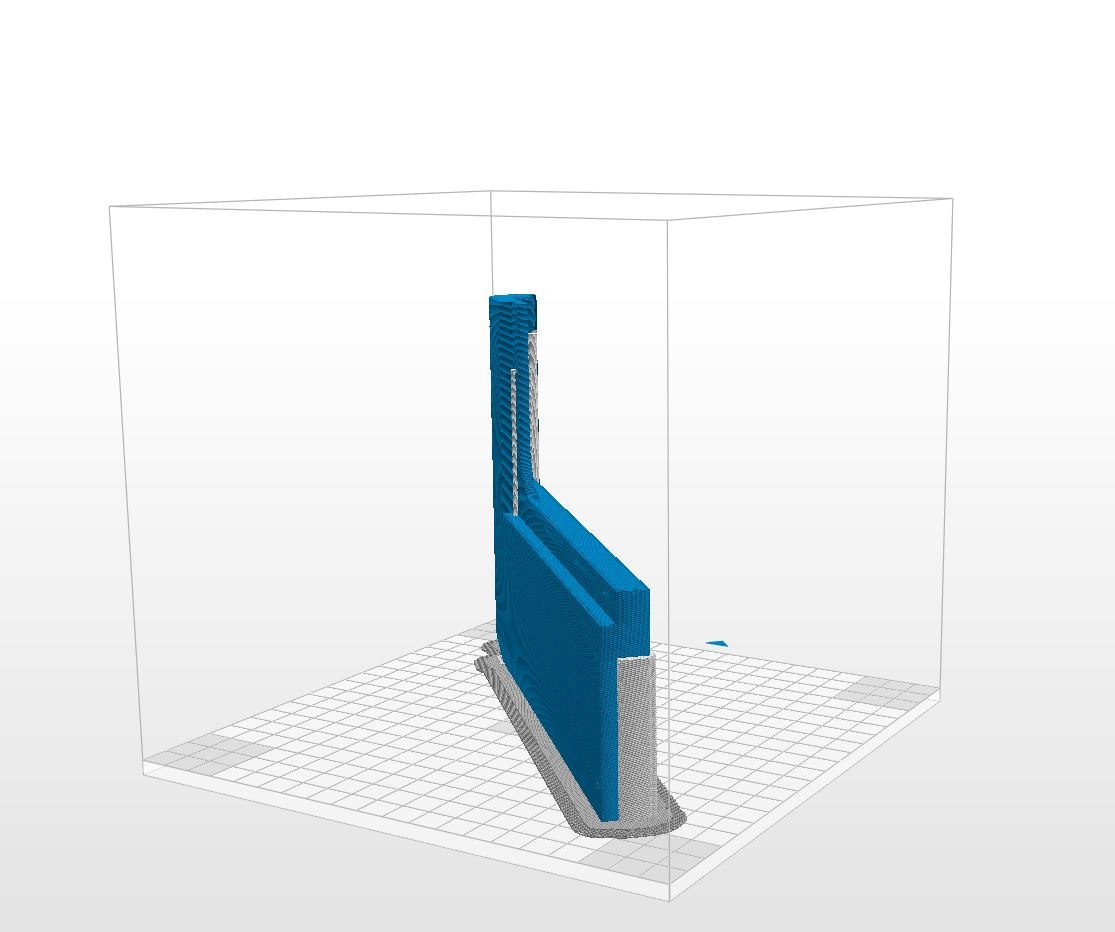
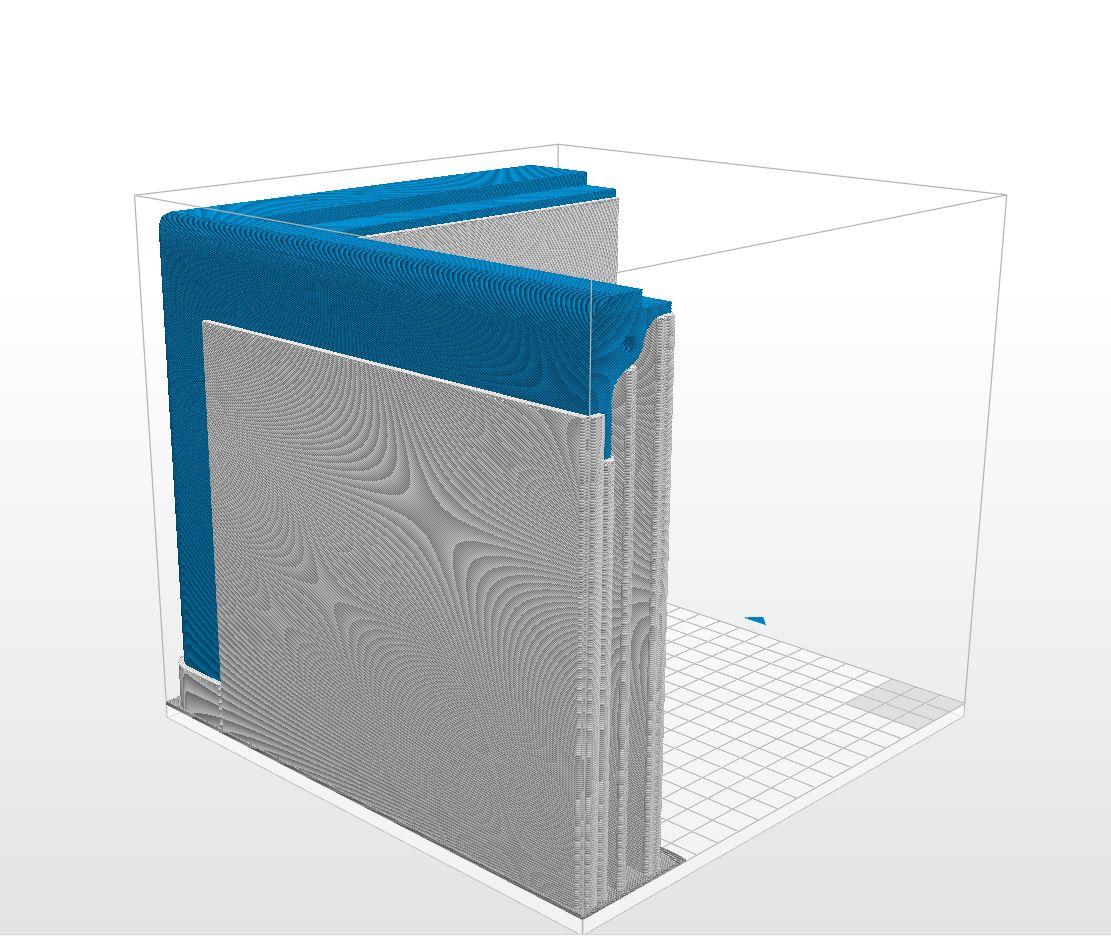
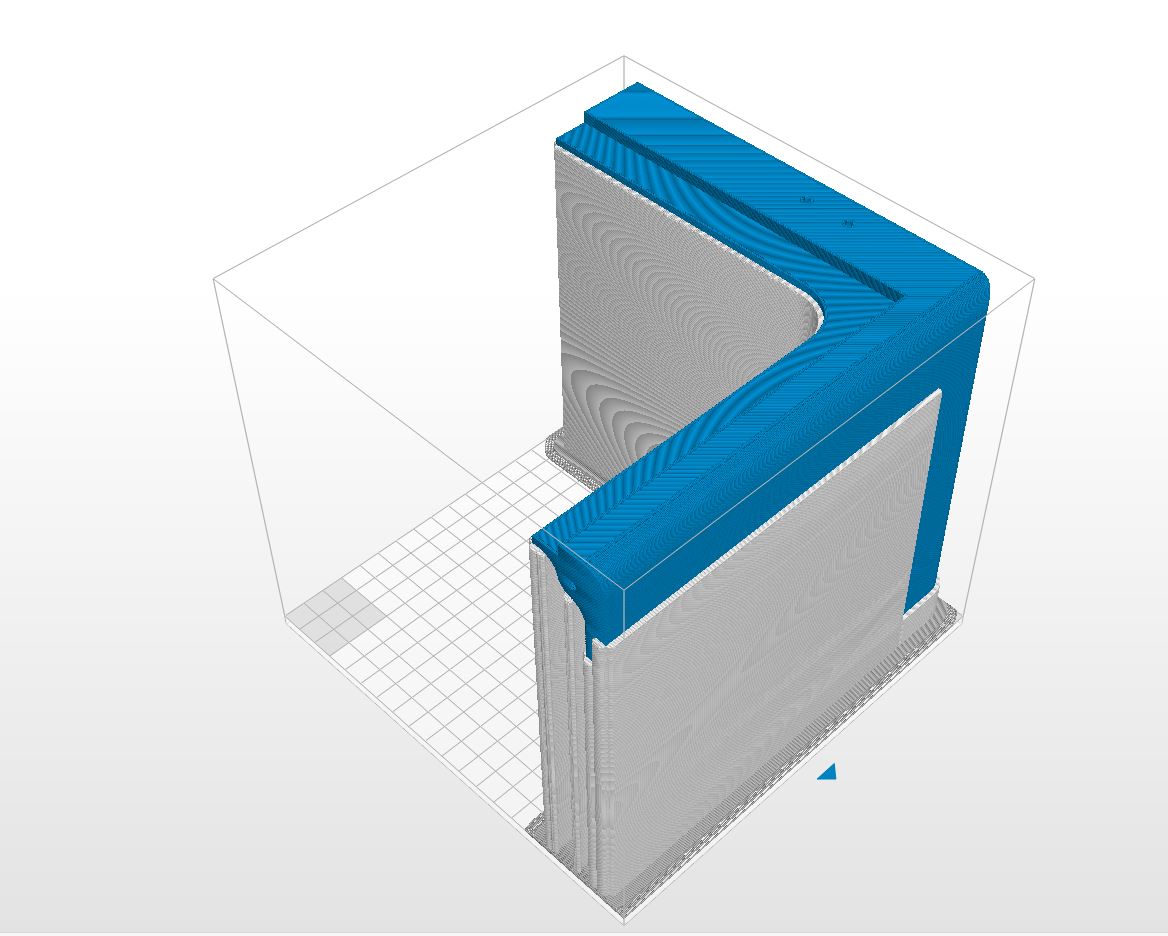
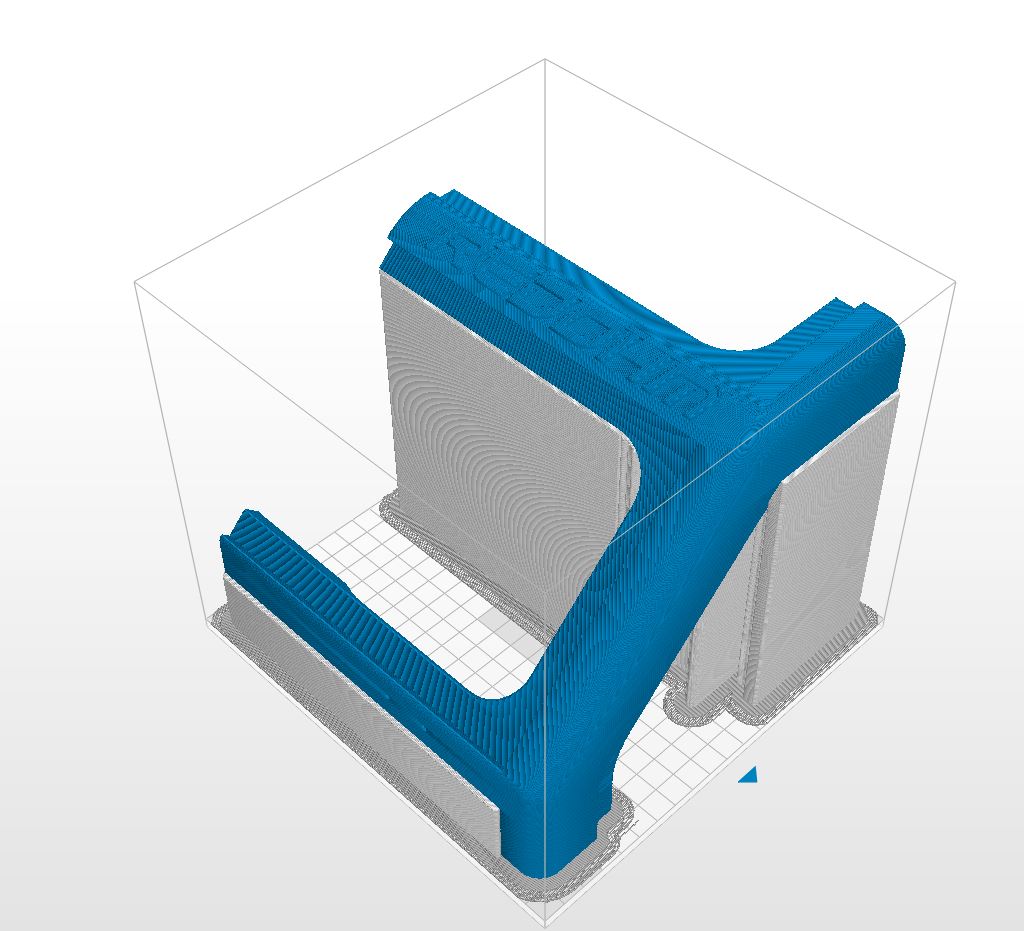
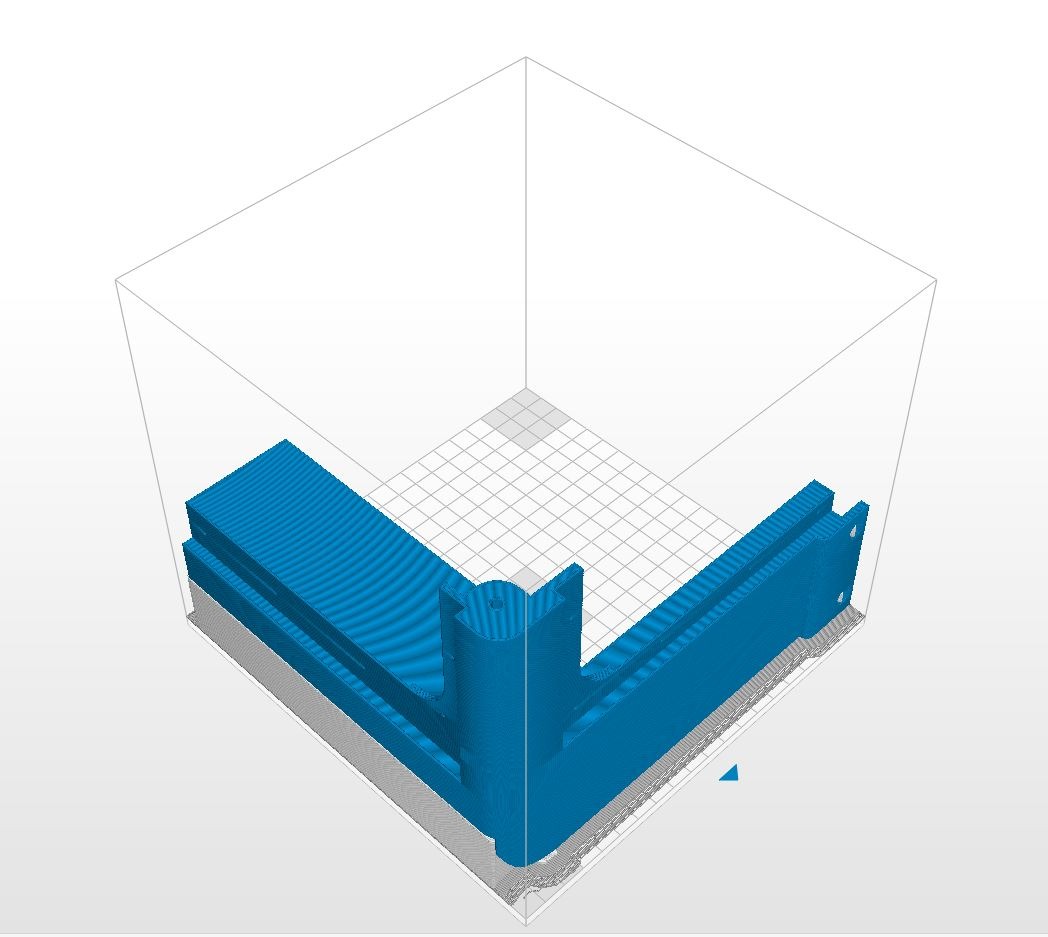
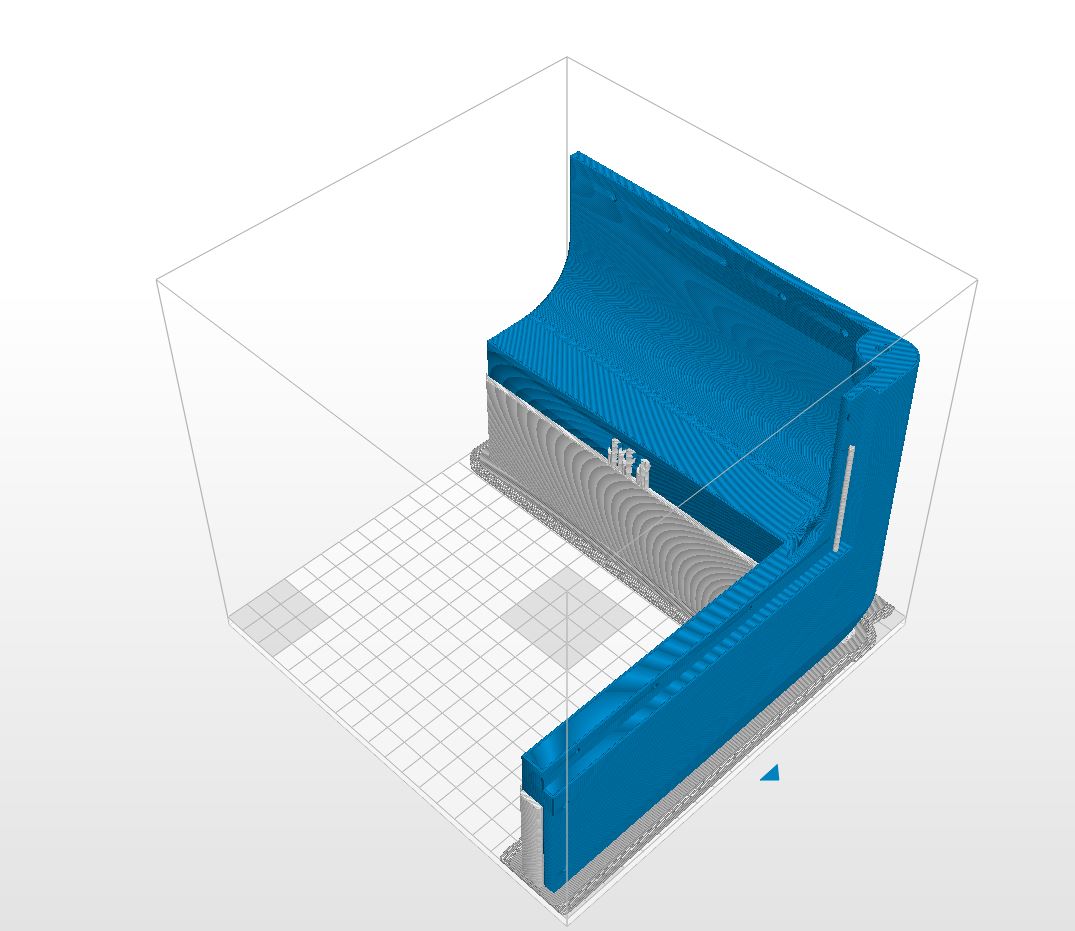
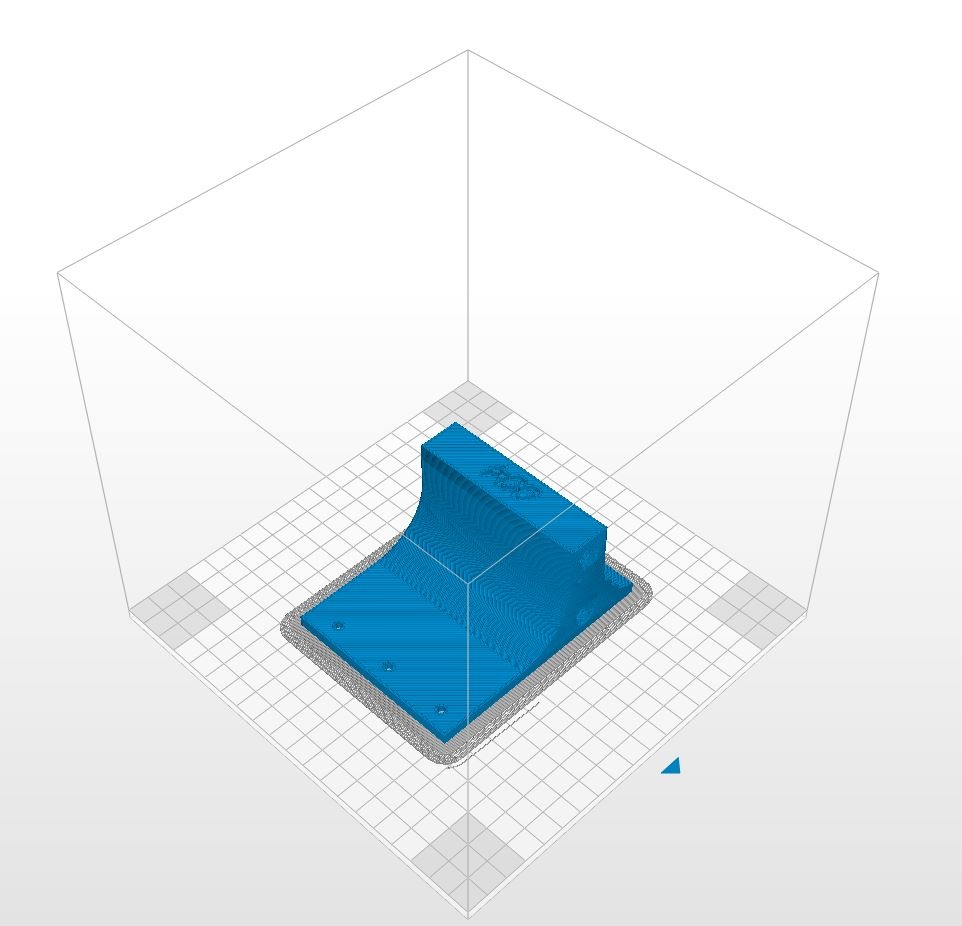
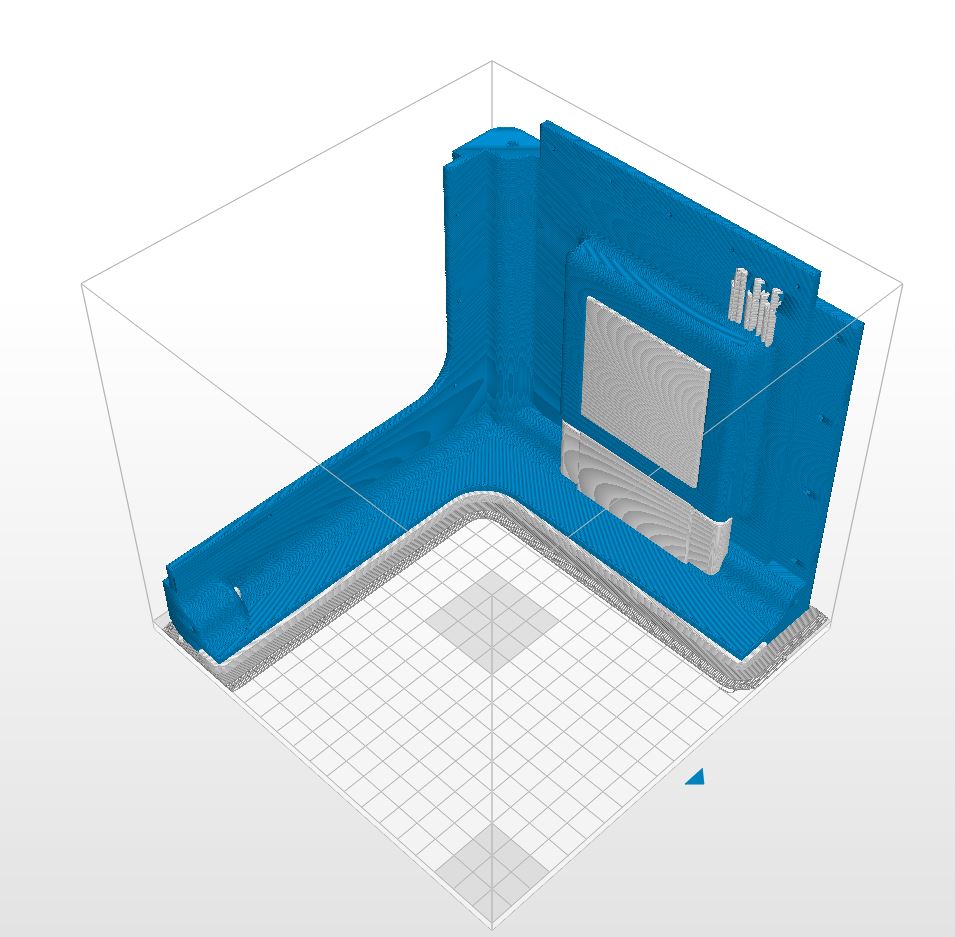
Positionnement conseillé des différentes pièces
|
Ce filament ( filament gris, rouge , noir métallisé exclusivement ) possède la propriété de ne laisser que très peu de traces lors du nettoyage des supports nécessaires à la fabrication de celle-ci. Cela nous permet d’avoir un aspect des plus réussis. C’est pour cette raison que les pièces sont positionnées pour avoir le moins de supports possibles, d’où une consommation de filament plus réduite et un temps d’impression moins long.
|
 Position pour la pièce 001 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 002 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 003 ArianePlast Zortrax M200 – RedOhm |
|
 Position pour la pièce 004 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 005 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 006 ArianePlast Zortrax M200 – RedOhm |
|
 Position pour la pièce 007 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 008 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 009 ArianePlast Zortrax M200 – RedOhm |
| Retour au sommaire |
![]()
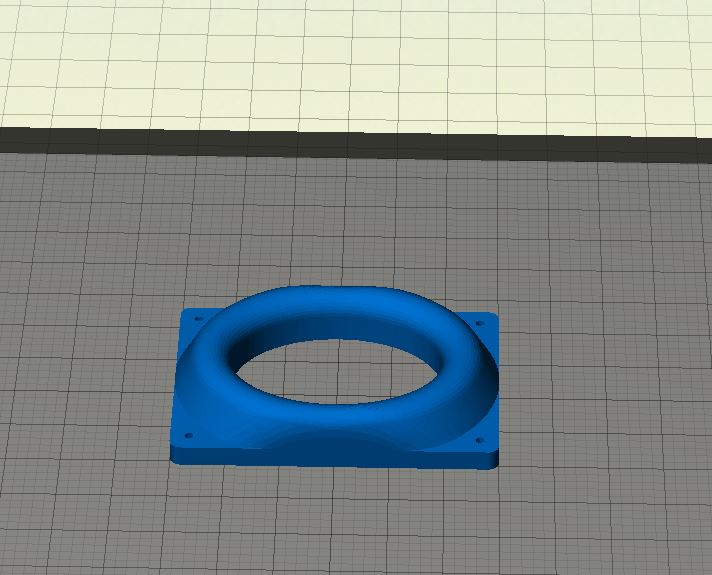
Impression des accessoires pour le capot de la Zortrax M200 |
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé | Matière |
| 020 | 98 | 14 | 119 | 93g | 7h10mm | PLA |
| 021 | 24 | 32 | 10 | 4g | 32mm | ABS ou Hips |
| 022 | 140 | 40 | 30 | 42g | 4h28mm | ABS ou Hips |
| Retour au sommaire |
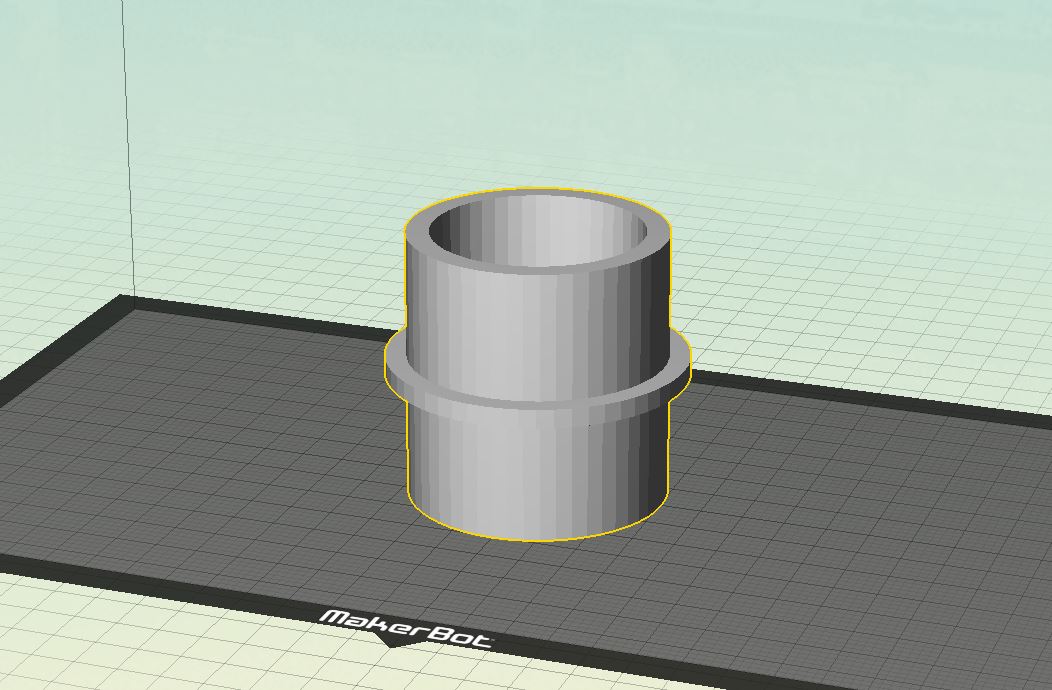
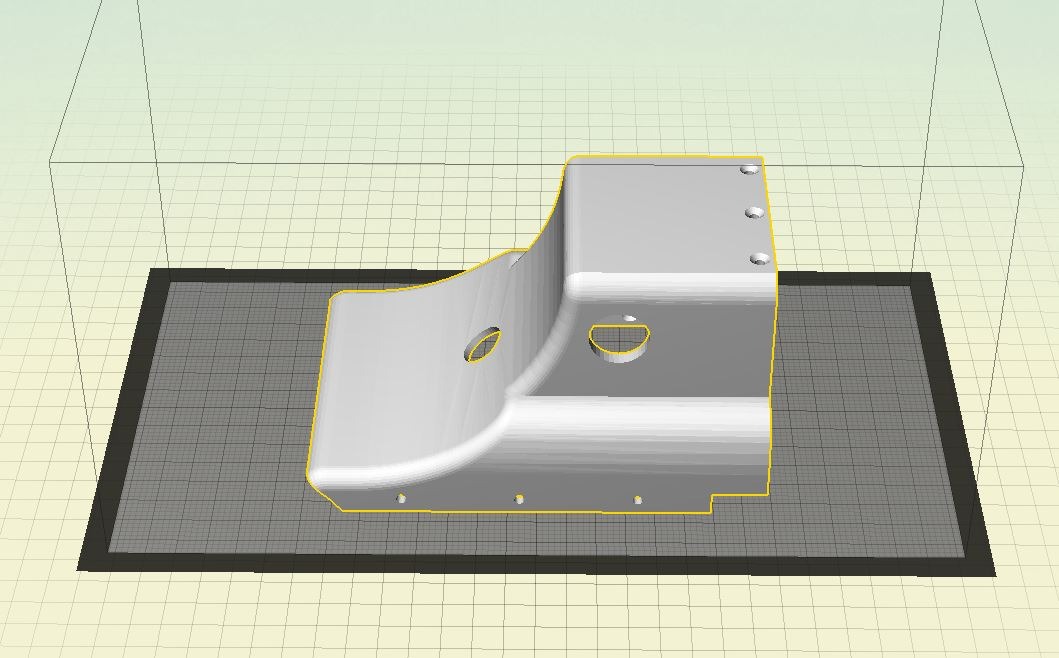
![]()
Les fichiers STL pour l’impression du capot pour l’imprimante Zortrax M200 |
|
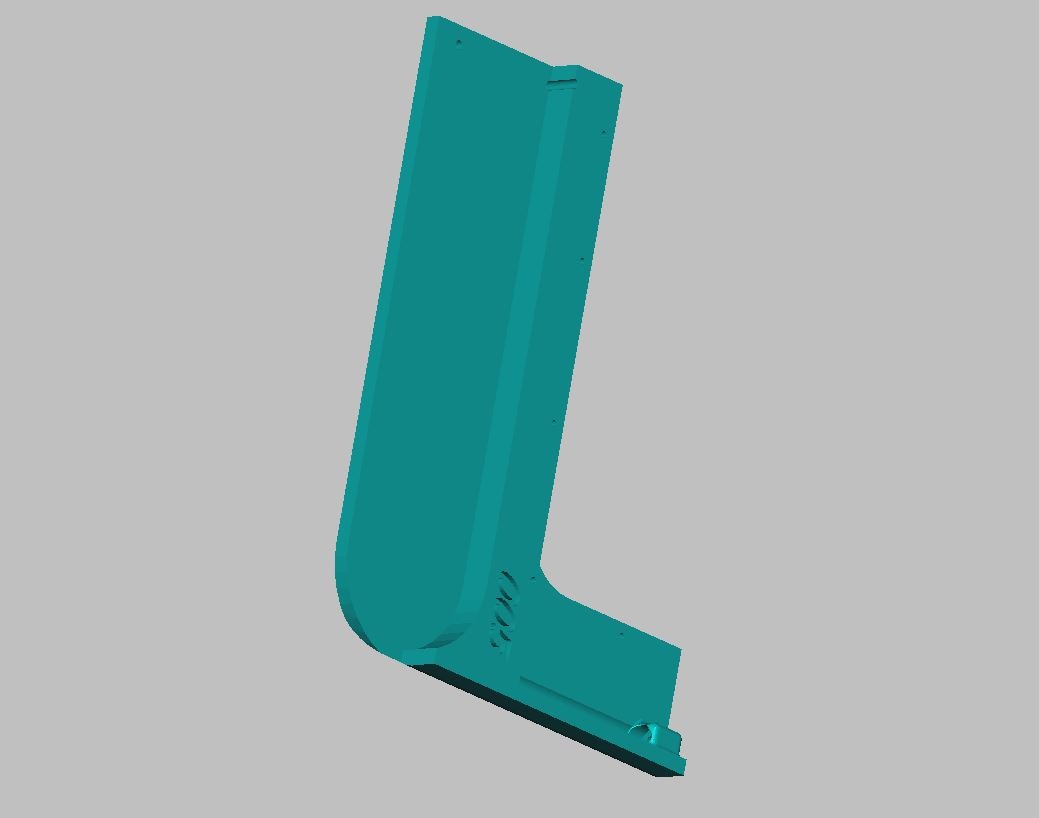
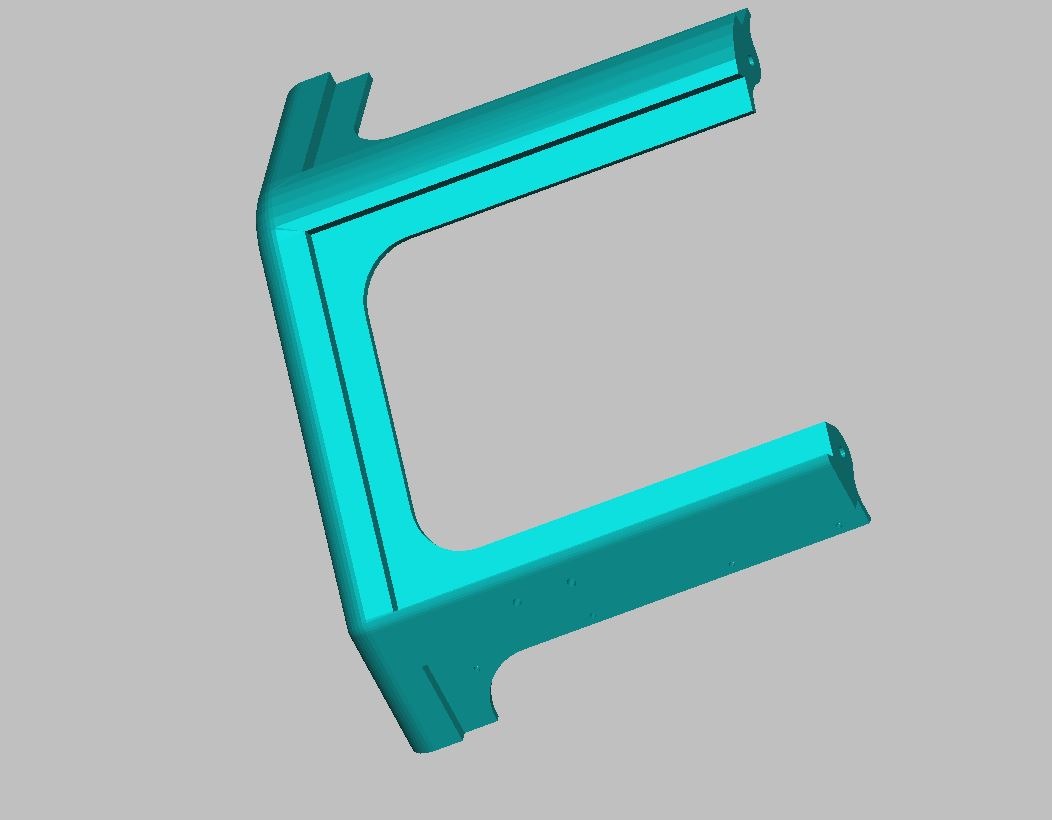
Cliquez sur la pièce pour agrandir la vue |
||
|
 Capot Zortrax piece 001 |
 Capot Zortrax piece 002 |
 Capot Zortrax piece 003 |
|
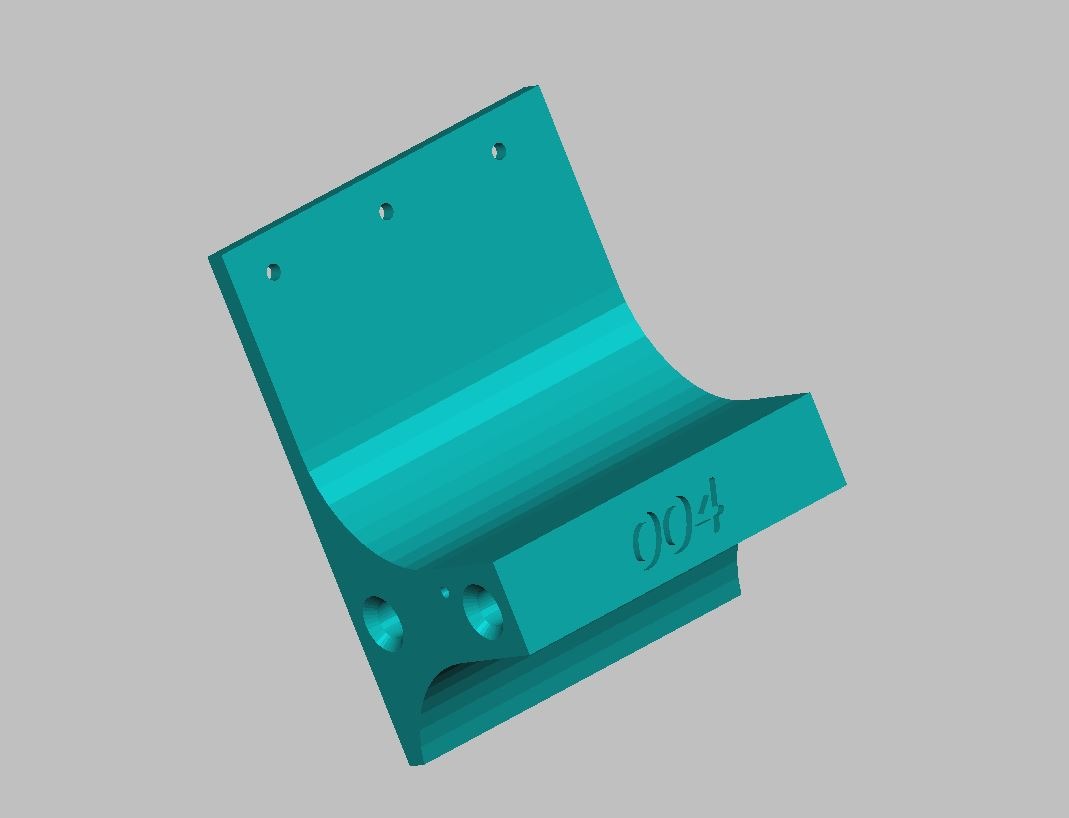 Capot Zortrax piece 004 |
 Capot Zortrax piece 005 |
|
| Retour au sommaire |
|
 Capot Zortrax piece 006 |
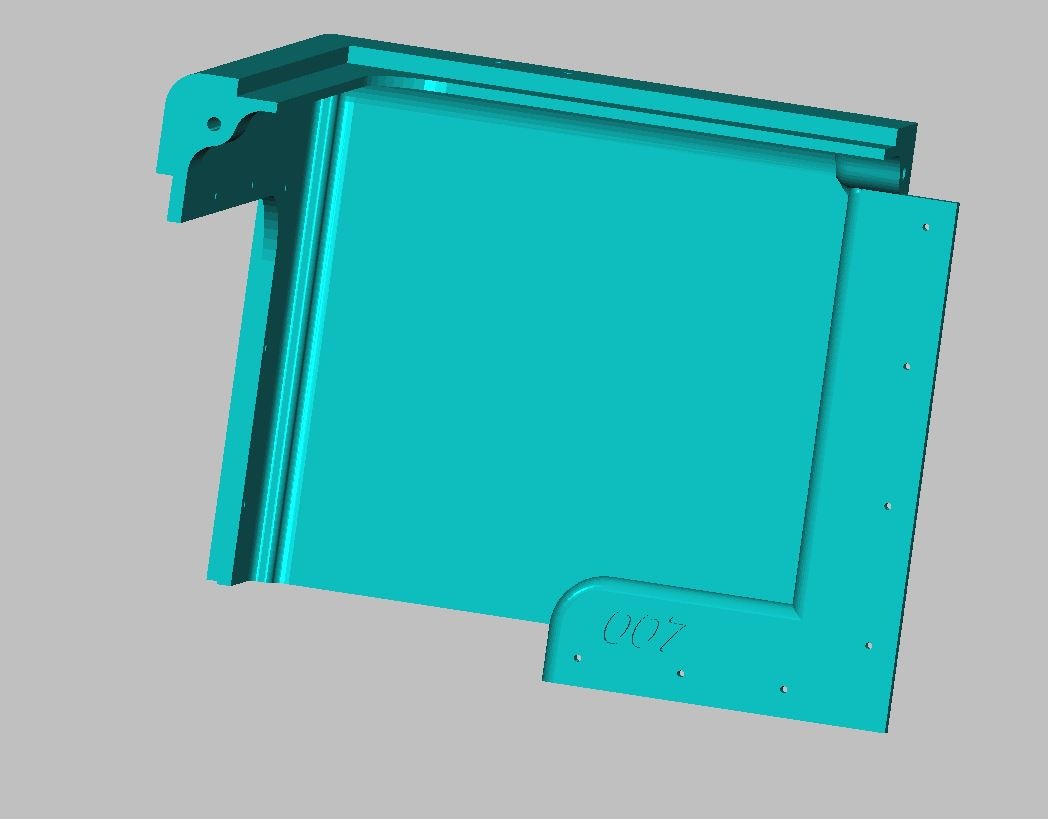 Capot Zortrax piece 007 |
 Capot Zortrax piece 008 |
|
 Capot Zortrax piece 009 |
||
| Retour au sommaire |
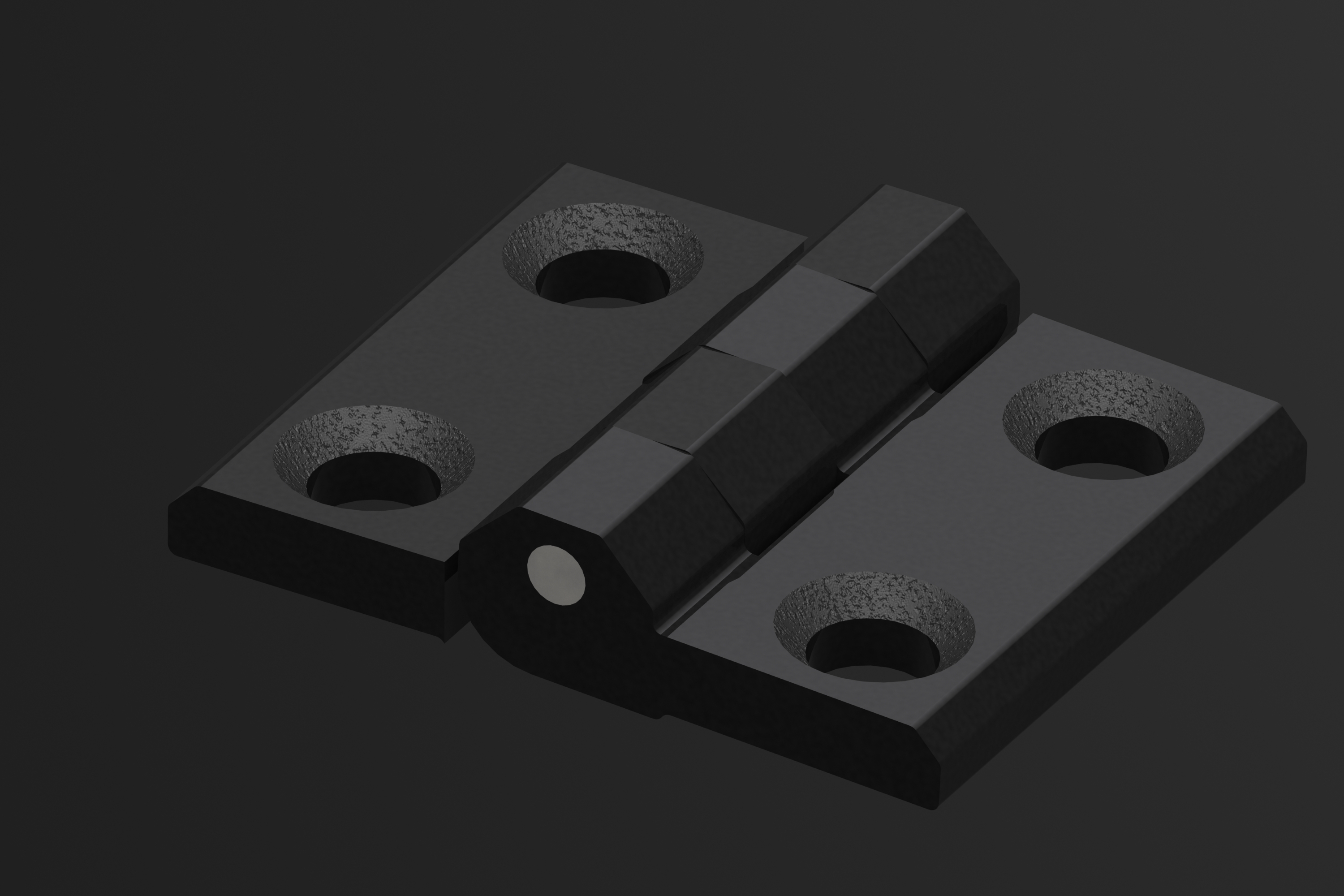
|
 Pièce 020 – Capot câble Zortrax M200 – RedOhm |
 Pièce 021- Charniere Zortrax M200 – RedOhm |
 Pièce 022 -Poignet Zortrax M200 – RedOhm |
| Retour au sommaire |
![]()
Dossier pour le plexiglas |
Le polyméthacrylate de méthyle ou PMMA, plus connu sous le nom de plexiglas, a été inventé par les chimistes Barker et Skinner en 1924.
Il s’agit d’une matière Plastique appartenant à la famille des thermoplastiques, qui a pour propriétés d’être transparente et très résistante.
Ce matériau appartient à la famille des thermoplastiques, c’est-à-dire des matières plastiques qui se déforment et peuvent être façonnées sous l’action de la chaleur.
Source : Gralon.net
Exemple d’approvisionnement : Evonik industries
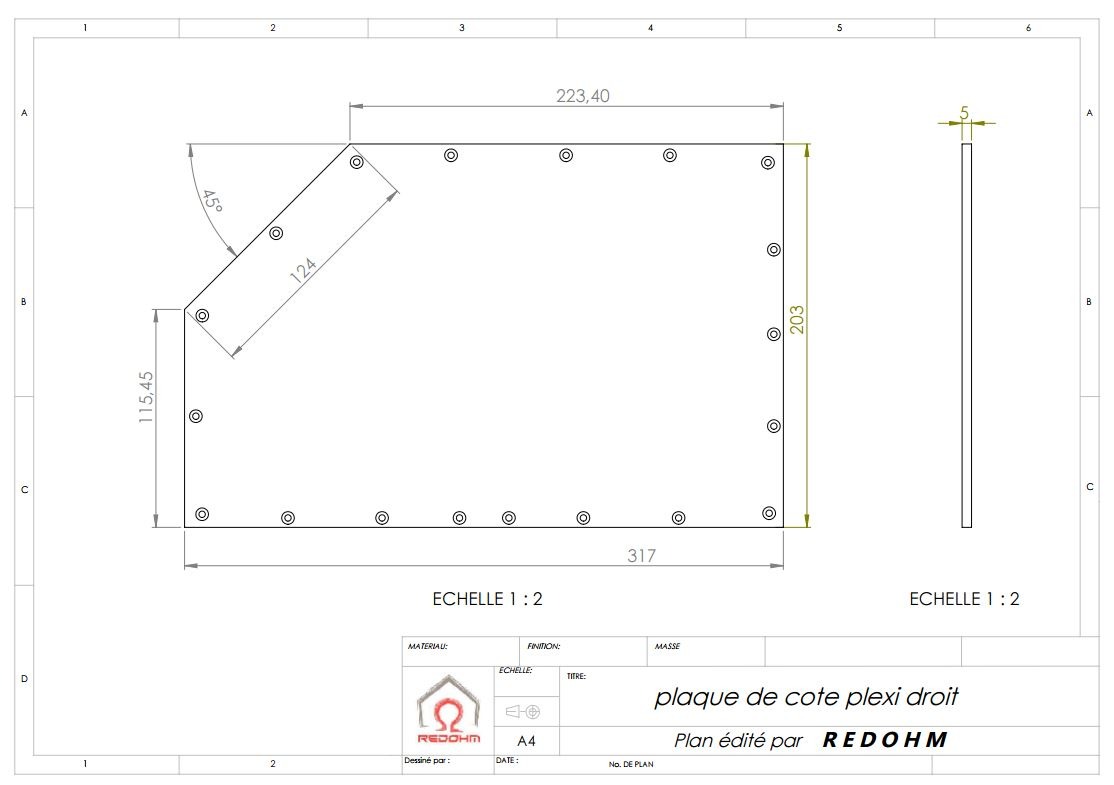
Plaque de cote plexi droit – RedOhm
plaque de cote plexi droit
plaque de cote plexi gauche
plaque dessus
plaque devant bas
plaque devant haut
| Retour au sommaire |
![]()
![]()
Mise à jour le 26/02/2017
| Retour au sommaire |
![]()
Présentation de l’article . |
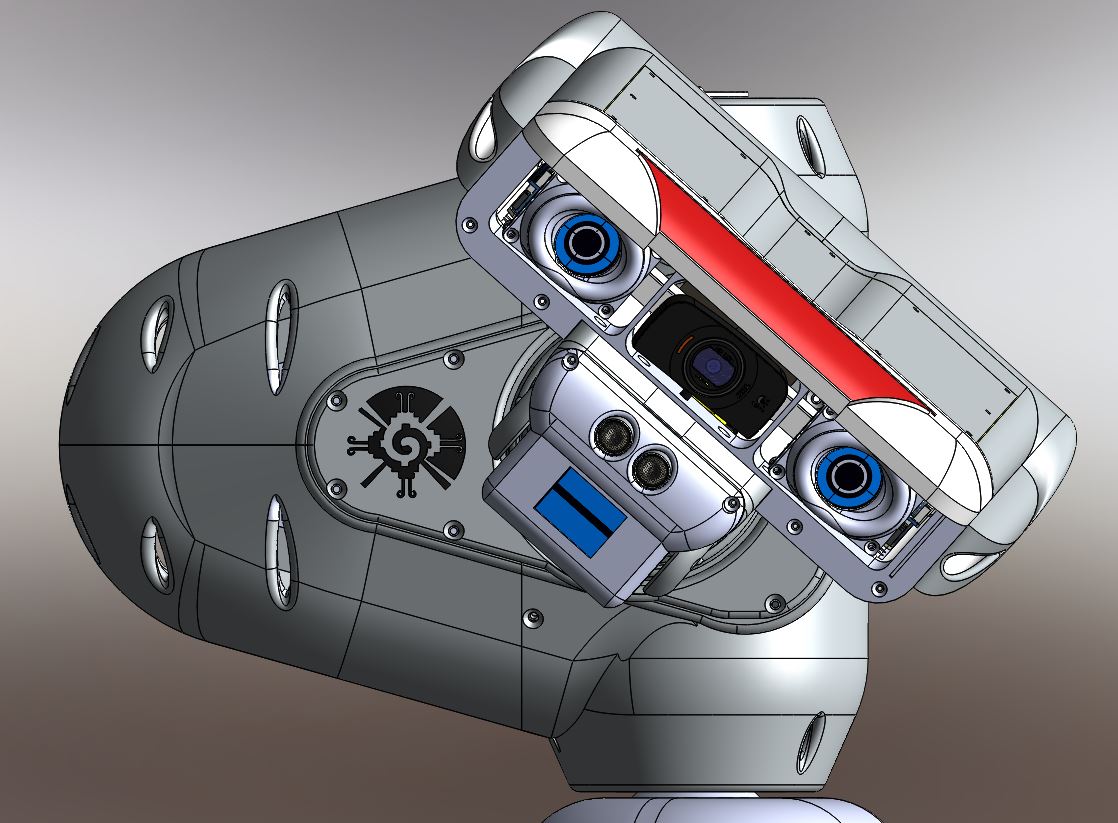
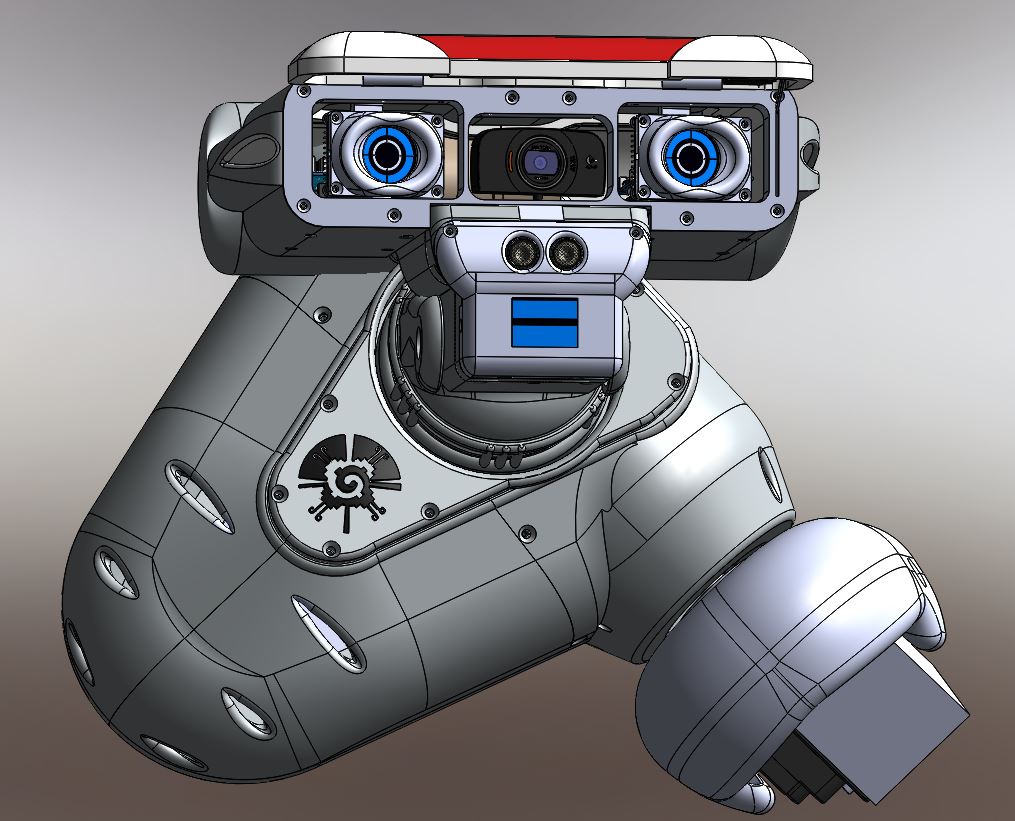
Dans cet article, nous allons étudier comment les yeux et la bouche de Maya sont pilotés, mais je pense qu’il est important de faire un petit rappel des objectifs de fonctionnement et du résultat à obtenir.
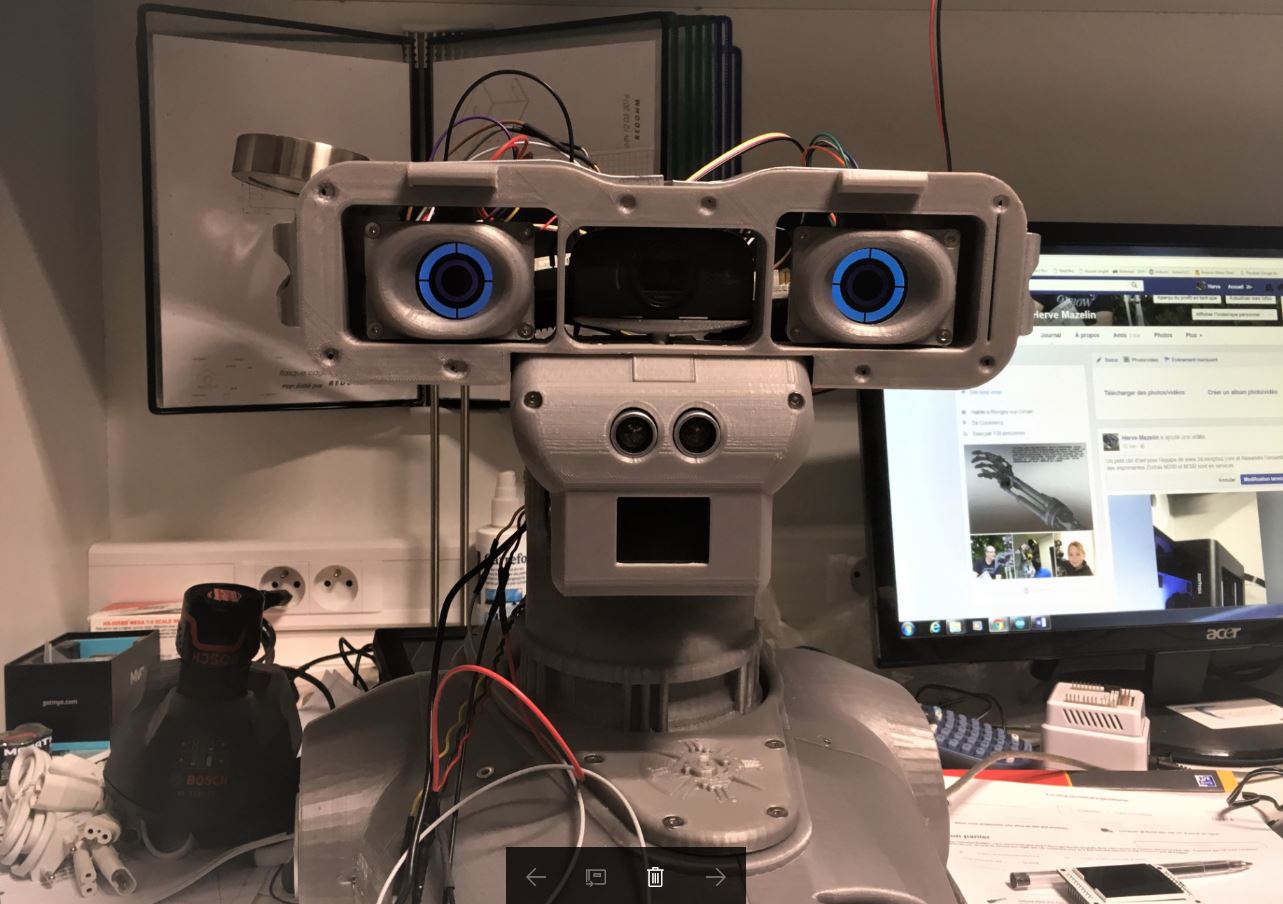
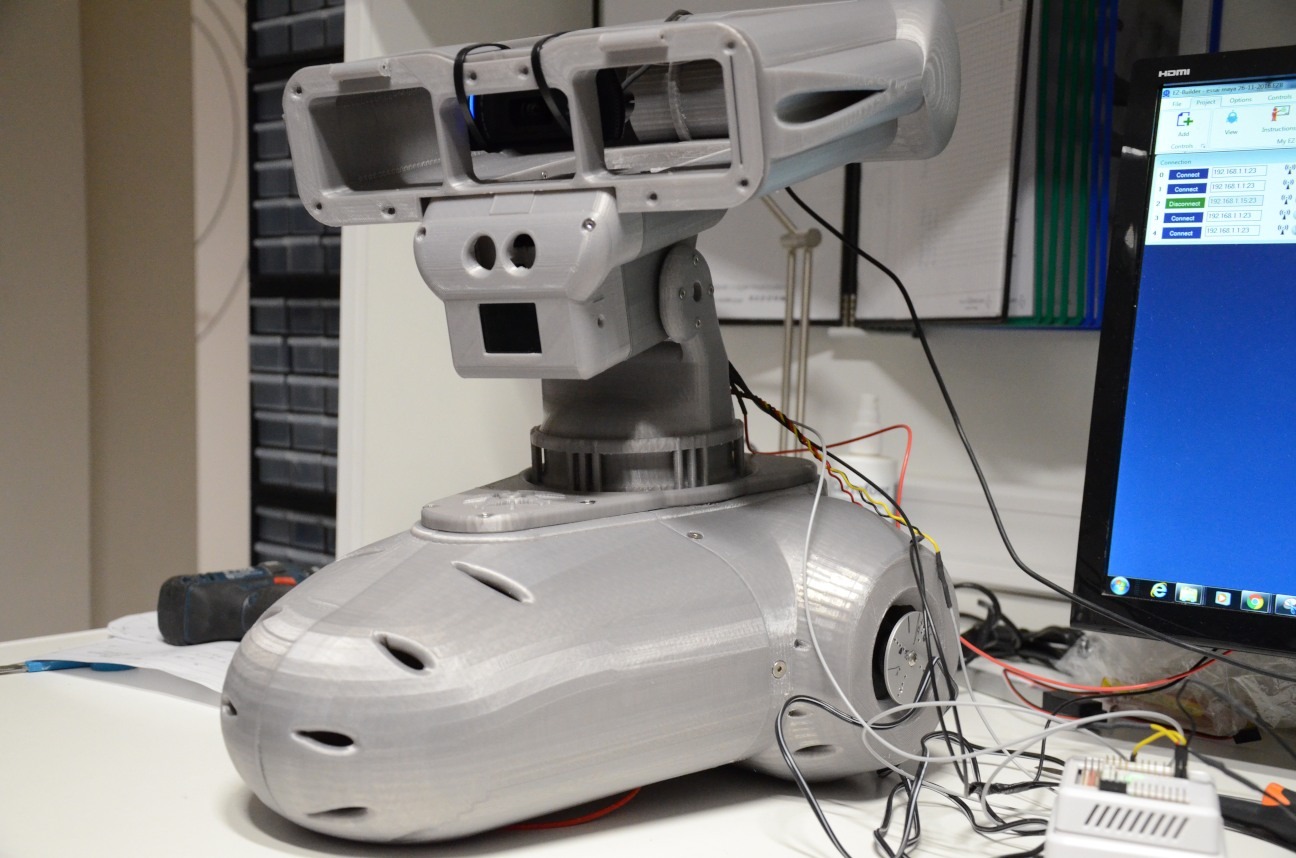
Robot Maya de RedOhm
Comment transposer des expressions humaines à un robot ?
Nous avons donc pensé que les yeux étaient un bon départ pour déterminer des expressions humaines transposées à la machine .Ces expressions seront de plusieurs natures, un regard attentif, penaud, en colère etc. et même quelques expressions comme un clin d’œil .Nous avons donc développé rapidement quelques expressions, puis nous avons mis côte à côte 2 écrans pour imaginer le reste de la tête de Maya. Évidemment au premier coup d’œil il manquait quelque chose, la bouche, eh ! Oui c’est une partie du visage qui peut définir énormément d’expression ne serait-ce que déjà simulé la parole.
Enfin si on regarde l’ensemble de la tête de notre futur robot les deux yeux et la bouche sont d’un couple parfait comme chez l’humain d’ailleurs. Et oui de ce couple on peut créer des expressions un peu plus complexes avec des paliers.
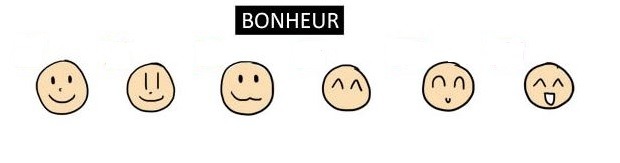
Je m’explique dans la phase bonheur on peut avoir plusieurs types de bonheur comme par exemple être simplement souriant, avoir un petit sourire mignon qui pourrait être par exemple une bouche un peu plus ouverte ou un sourire heureux, ou très heureux.
Dans le désarroi, on peut avoir le boudeur, le déçu, mécontent, très mécontent.
Enfin on peut greffer d’autres types d’expression humaine comme l’admiration, la maladie, blasé, espiègle, une fausse innocente, divers types de gènes, brefs, tout un ensemble que l’on va pouvoir créer. Plus cette machine possédera d’expression humaine, plus sa différence nous surprendra.
Passons maintenant à la configuration de cet ensemble. Chaque œil est représenté par un écran LCD, qui est lui-même relié à une carte Arduino méga 2560 (cette carte a été choisie pour ne pas restreindre les applications futures). Ces deux cartes seront pilotées par une carte mère qui enverra les informations aux deux cartes esclaves par l’intermédiaire d’un bus I2C, cette même carte mère aura aussi la double fonction de piloter le mouvement des lèvres.
Nous allons donc étudier tout au long de cet article comment arriver au fonctionnement final, mais pour cela nous allons passer par des étapes intermédiaires.
| Retour au sommaire |
![]()
Etape n°1 |
Le but est de faire apparaître sur l’écran des mots, le premier étend attentif, le second penaud et enfin d’effacer l’écran. Pour pouvoir passer d’un message à l’autre ou d’effacer l’écran, on devra actionner un potentiomètre et c’est cette valeur analogique qui nous déterminera l’action à entreprendre.
Pour connecter l’écran LCD A000096 à une carte Arduino Mega, utilisez cette configuration de broche.
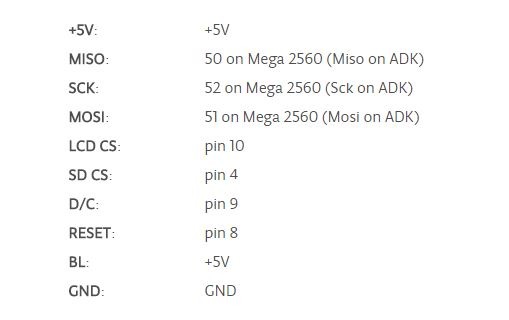
Maya : Pour connecter l’écran LCD A000096 – RedOhm
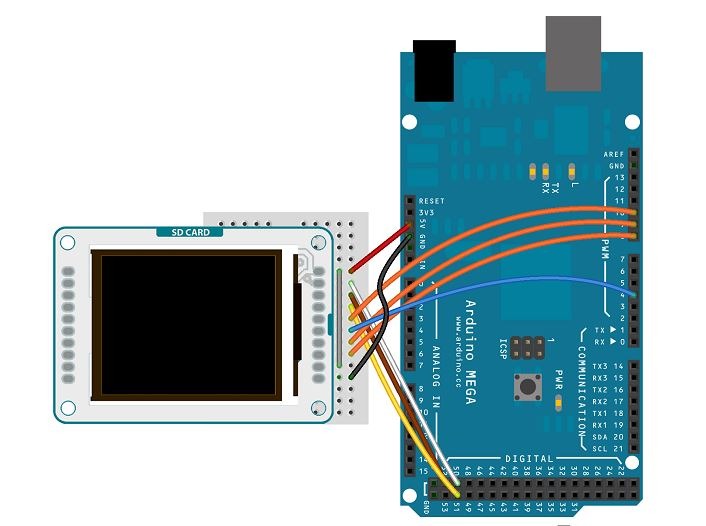
Schéma de raccordement de l’afficheur sur un Arduino 2560 – RedOhm
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 |
/* * * * * le but est de faire apparaître sur l’écran des mots, le premier étend * attentif, le second penaud et enfin d’effacer l’écran. Pour pouvoir * passer d’un message à l’autre ou d’effacer l’écran, on devra actionner * un potentiomètre et c’est cette valeur analogique qui nous déterminera * l’action à entreprendre. * * * code projet : Affichage_texte * * Herve Mazelin - RedOhm * 17/01/2017 */ // je charge la librairie SPI // Cette librairie vous permet de communiquer avec des périphériques SPI // La carte Arduino en tant que "maitre" #include <SPI.h> // je charge la librairie TFT // Cette bibliothèque permet à une carte Arduino de communiquer à // l'écran LCD TFT #include <TFT.h> // Affectation des pins pour la communication Arduino-> afficheur #define cs 10 #define dc 9 #define rst 8 TFT screen = TFT(cs, dc, rst); // déclaration de l'entrée analogique int analogPin = 0; // variable de type int pour stocker la valeur du potentiometre int val = 0; // variable du type int pour stocker la valeur de passage dans le controle // si la valeur val et strictement inférieure à 100 int cont1= 0; // variable du type int pour stocker la valeur de passage dans le controle // si la valeur val et strictement comprise de 105 a 200 int cont2= 0; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de l'écran screen.begin(); // Efface l'écran LCD avec la couleur indiquée. // Peut être utilisée dans loop () pour effacer l'écran. // Couleur du fond noir screen.background(0,0,0); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // lit la valeur de la tension analogique présente sur la broche val = analogRead(analogPin); // si la valeur val et strictement inférieure à 100 // on affiche le texte Attentif if ((val<100) &&(cont1==0)){ // Efface l'ecran couleur du fond noir screen.background(0,0,0); // Dans ce cas defini la couleur du texte screen.stroke(255,255,255); // Définit la taille du texte qui suit. La taille par défaut // est "1". Chaque changement de taille augmente le texte // par 10 pixels en hauteur. Autrement dit, la taille 1 = 10 // pixels, taille 2 = 20 pixels, et ainsi de suite. screen.setTextSize(2); // Écrire un texte à l'écran aux coordonnées données. screen.text("Attentif", 0, 0); // mise de la variable cont1 a 1 pour la confirmation du // passage dans la boucle de test attentif cont1=1; // Remise a zero de la variable de controle Penaud 1 cont2=0; } // si la valeur val et strictement inférieure à 100 // on affiche le texte Penaud 1 else if (((val>105)&&(val<200))&&(cont2==0)){ // Efface l'ecran couleur du fond noir screen.background(0,0,0); // Dans ce cas defini la couleur du texte screen.stroke(255,255,255); // Définit la taille du texte qui suit. La taille par défaut // est "1". Chaque changement de taille augmente le texte // par 10 pixels en hauteur. Autrement dit, la taille 1 = 10 // pixels, taille 2 = 20 pixels, et ainsi de suite. screen.setTextSize(2); // Écrire un texte à l'écran aux coordonnées données. screen.text("Penaud 1 ", 0, 0); // mise de la variable cont2 a 1 pour la confirmation du // passage dans la boucle de test Penaud 1 cont2=1; // Remise a zero de la variable de controle attentif cont1=0; } // si la valeur val et strictement superieure a 1000 // on efface l'ecran avec la commande -> screen.background(0,0,0) else if (val>1000){ // on efface l ecran screen.background(0,0,0); // Remise a zero de la variable de controle attentif cont1=0; // Remise a zero de la variable de controle penaud cont2=0; } } |
![]()
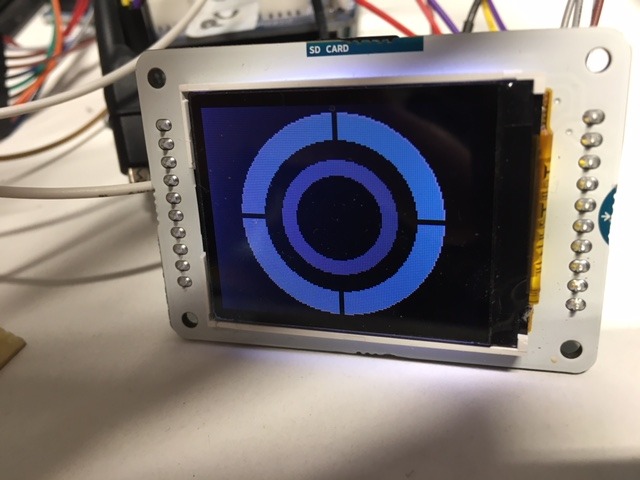
Etape n°2 |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 |
/* * * * * le but est de faire apparaître sur l’écran les yeux suivant : le premier * étend attentif, le second penaud et enfin d’effacer l’écran. Pour pouvoir * passer d’un dessin à l’autre ou d’effacer l’écran, on devra actionner * un potentiomètre et c’est cette valeur analogique qui nous déterminera * l’action à entreprendre. * * * code projet : 0001-Affichage dessin attentif et penaud * * Herve Mazelin - RedOhm * 22/01/2017 */ // je charge la librairie SPI // Cette librairie vous permet de communiquer avec des périphériques SPI // La carte Arduino en tant que "maitre" #include <SPI.h> // je charge la librairie TFT // Cette bibliothèque permet à une carte Arduino de communiquer à // l'écran LCD TFT #include <TFT.h> // Affectation des pins pour la communication Arduino-> afficheur #define cs 10 #define dc 9 #define rst 8 TFT screen = TFT(cs, dc, rst); // déclaration de l'entrée analogique int analogPin = 0; // variable de type int pour stocker la valeur du potentiometre int val = 0; // variable du type int pour stocker la valeur de passage dans le controle // si la valeur val et strictement inférieure à 100 int cont1= 0; // variable du type int pour stocker la valeur de passage dans le controle // si la valeur val et strictement comprise de 105 a 200 int cont2= 0; // variable du type int pour la boucle creation de l'oeil int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de l'écran screen.begin(); // Efface l'écran LCD avec la couleur indiquée. // Peut être utilisée dans loop () pour effacer l'écran. // Couleur du fond noir screen.background(0,0,0); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // lit la valeur de la tension analogique présente sur la broche val = analogRead(analogPin); // si la valeur val et strictement inférieure à 100 // on affiche le dessin de l'oeil attentif if ((val<100) &&(cont1==0)){ // Appel de la fonction -> creation_de_oeil creation_de_oeil(); // Mise a 1 de la variable cont1 qui determine que // l’on a déjà traversé cette instruction enfin // d’éviter le clignotement de l’œil cont1=1; // Remise a zero de la variable de controle Penaud 1 cont2=0; } // si la valeur val et strictement inférieure à 200 // et superieur a 105 on affiche le texte Penaud 1 else if (((val>105)&&(val<200))&&(cont2==0)){ // Appel de la fonction -> creation_de_oeil creation_de_oeil(); // Appel de la fonction -> creation_penaud creation_penaud(); // Mise a 1 de la variable cont2 qui determine que // l’on a déjà traversé cette instruction enfin // d’éviter le clignotement de l’œil cont2=1; // Remise a zero de la variable de controle attentif cont1=0; } // si la valeur val et strictement superieure a 1000 // on efface l'ecran avec la commande -> screen.background(0,0,0) else if (val>1000){ // on efface l ecran screen.background(0,0,0); // Remise a zero de la variable de controle attentif cont1=0; // Remise a zero de la variable de controle penaud cont2=0; } } /* * la creation de la fonction -> creation_de_oeil * * a savoir : la creation d'une fonction est independante du programme * principal.Elle sera donc en dehors du programme principal * */ void creation_de_oeil() { // Efface l'ecran et met le fond en noir screen.background(0,0,0); //defini la couleur pour tracer l'objet a dessiner screen.stroke(255,255,255); // 1 anneau exterieure bleu // définition de la couleur de remplissage exemple bleu -> 128,255,255 screen.fill(128,255,255); // je dessine un annneau exterieur dans le centre de l'écran // je prend la largeur de l'ecran que je divise par 2 // je prend la hauteur de l'ecran que je divise par 2 screen.circle(screen.width()/2, screen.height()/2, 60); //dessine le trait horizontal et vertical //defini la couleur pour tracer l'objet a dessiner en noir screen.stroke(0,0,0); // Trace trois lignes horizontale qui traverse l'ecran for (x=0;x<3;x++) { screen.line(1,63+x,159,63+x); } // Trace une ligne verticale qui traverse l'ecran d'une epaisseur de // 3 pixels for (x=0;x<3;x++) { screen.line (79+x,1,79+x,127); } // 2 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 45); // 3 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(136,136,136); // je dessine un cercle dans le centre de l'écran screen.circle(80, 64, 35); // 4 cercle // définit la couleur de remplissage exemple noir 0.0.0 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 25); } /* * la creation de la fonction -> Dessin de l'oeil penaud * * a savoir : la creation d'une fonction est independante du programme * principal.Elle sera donc en dehors du programme principal * */ void creation_penaud() { // je dessine un triangle // Boucle comptant de 0 a 80 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<80;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,0,160,x); } // je dessine le 2eme triangle je modifie la position verticale // ou la ligne commence // Boucle comptant de 0 a 20 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<20;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,x,160,79); } } |
| Retour au sommaire |
![]()
Rappel : Documentations sur le matériel utile dans nos réalisations.
Mise à jour de 26/11/2019
Retour au sommaire
![]()
Présentation de l’article. |
Nous avons remarqué que pour certains constructeurs, lorsque le materiel devient obsolète , il est difficile de se procurer: drivers, schéma, exemple de programme ou même sous quel système d’exploitation ce materiel fonctionnait, alors que nous en possédons encore dans nos tiroirs . C’est pour cela que nous avons décidé de stocker le maximum d’information sur notre site . Evidemment cela ne concerne que le materiel que nous utilisons .
Vous trouverez donc dans cette page aussi bien du materiel récent mais aussi du matériel d’ancienne génération .
Un ensemble de programme vous sera proposé pour chaque élément que nous utilisons sur nos robots .
Retour au sommaire
![]()
Contrôleur de servomoteurs 6 canaux
|

Micro Maestro 6 canaux Pololu vue de la carte
Les 6 canaux Micro Maestro élèvent les performances des contrôleurs de servo de série, avec des fonctionnalités telles que l’interface USB natif, le TTL et le contrôle de scripts embarqués.
Très performant, il permet un contrôle fin pour la vitesse et l’accélération grâce à sa résolution élevée (0.25µs).
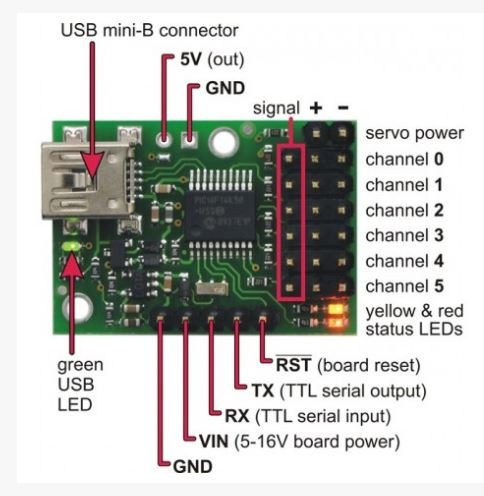
Micro Maestro 6 canaux Pololu repérage des pins de la carte
Alimentation: 5 à 16V ( attention a l’alimentation des servomoteurs )
Consommation : 40 à 50 mA max
Dimensions: 2,15 cm x 3,04 cm
Poids : 4,8 g
Référence fabricant: Contrôleur Micro Maestro 6
Prix moyen entre :15 à 17€
Information à telecharger:
Guide utilisateur Maestro -> [En] Maestro User’s Guide
| Retour au sommaire . |
![]()
Contrôleur de servomoteurs 12 canaux
|
en cours
| Retour au sommaire . |
![]()
Commande de moteur CC MC33926 2,5A .
|
–
Cette commande basée sur le circuit MC33926 permet de contrôler un moteur CC jusqu’à 2,5 A à partir d’une sortie PWM d’un microcontrôleur (Arduino, Seeeduino, etc).
Une tension de feedback permet d’avoir un retour sur la consommation du moteur. Ce module de petites dimensions est protégé contre les inversions de polarité, les surintensités et les échauffements excessifs.
Alimentation:
Partie logique: 2,5 à 5,5 Vcc
Partie moteur: 5 à 28 Vcc
Sortie moteur : 2,5 A (5 A en pointe)
Feedback » retour information » consommation moteur: environ 525 mV/A
Dimensions: 31 x 26 x 12 mm
Référence fabricant: 1212
Prix moyen entre :15 à 18€
Support pour ce module : RedOhm impression 3D
Raccordement du module :
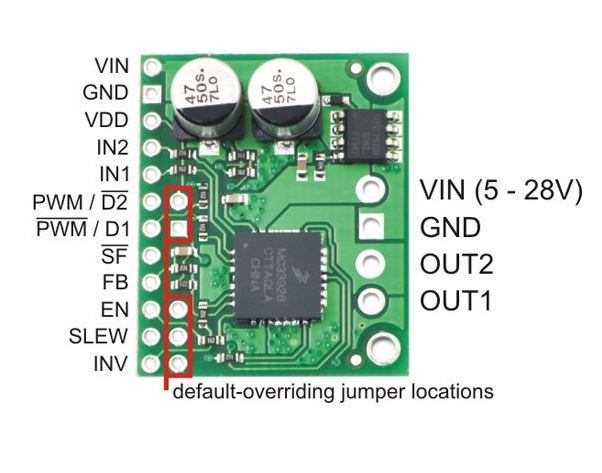
Pololu 1212 raccordement du module
| Retour au sommaire . |
![]()
Capteur de courant à effet hall
|
Le capteur de courant à effet Hall est un type de capteur de courant exploitant l’effet Hall pour produire une tension qui est l’image exacte (avec un facteur de proportionnalité connu) du courant à mesurer ou à visualiser.
L’effet Hall « classique » a été découvert en 1879 par Edwin Herbert Hall qui l’a énoncé comme suit : « un courant électrique traversant un matériau baignant dans un champ magnétique, engendre une tension perpendiculaire à ce dernier ». Sous certaines conditions, cette tension croît par paliers
Information technique supplémentaire
| Retour au sommaire . |
![]()
Capteur de courant à effet hall
|
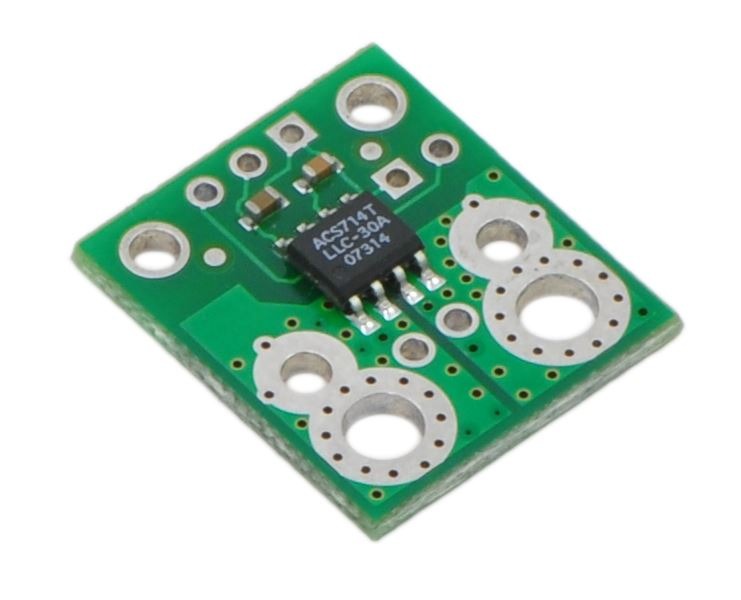
Capteur de courant 30A ACS714 Pololu
Ce capteur de courant basé sur un circuit à effet Hall ACS711EX permet de mesurer un courant de -30 A à +30 A. Une sortie analogique est proportionnelle au courant mesuré (2,5 V pour 0 A sous 5 Vcc). Un connecteur 5 broches est inclus (non soudé).
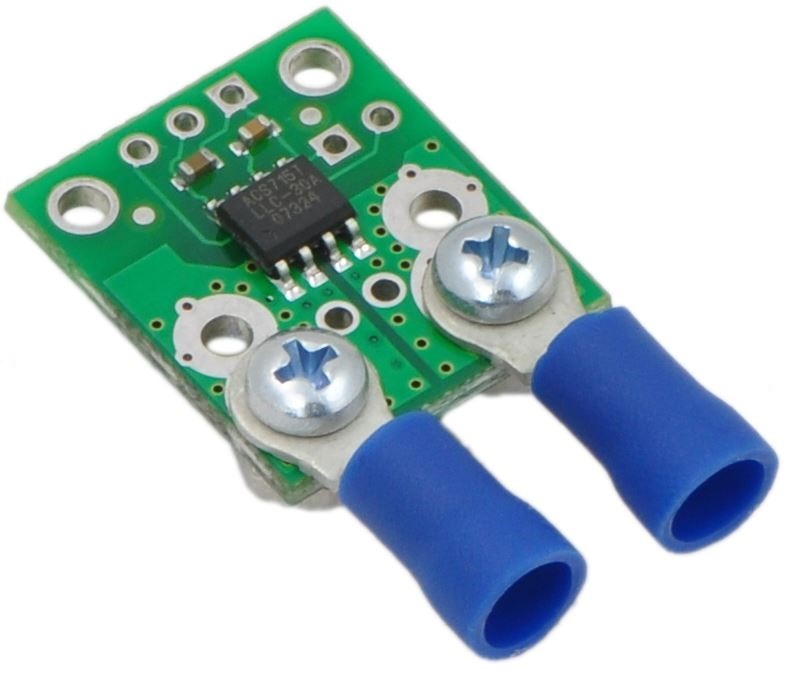
Capteur de courant 30A ACS714 Pololu
Alimentation: 3,3 à 5,0 Vcc
Consommation: 4 mA
Plage de mesure: -30 A à +30 A en AC ou DC
Plage d’utilisation: 30 Volts maxi
Sensibilité: 68 mV/A à 5 Vcc (45 mV/A à 3,3 Vcc)
Précision: ±4 %
Shunt: 0,6 mΩ
Bande passante: 100 kHz
T° de service: -40 à +125 °C
Dimensions: 21 x 18 x 3 mm
Référence fabricant: 2453
| Retour au sommaire . |
![]()
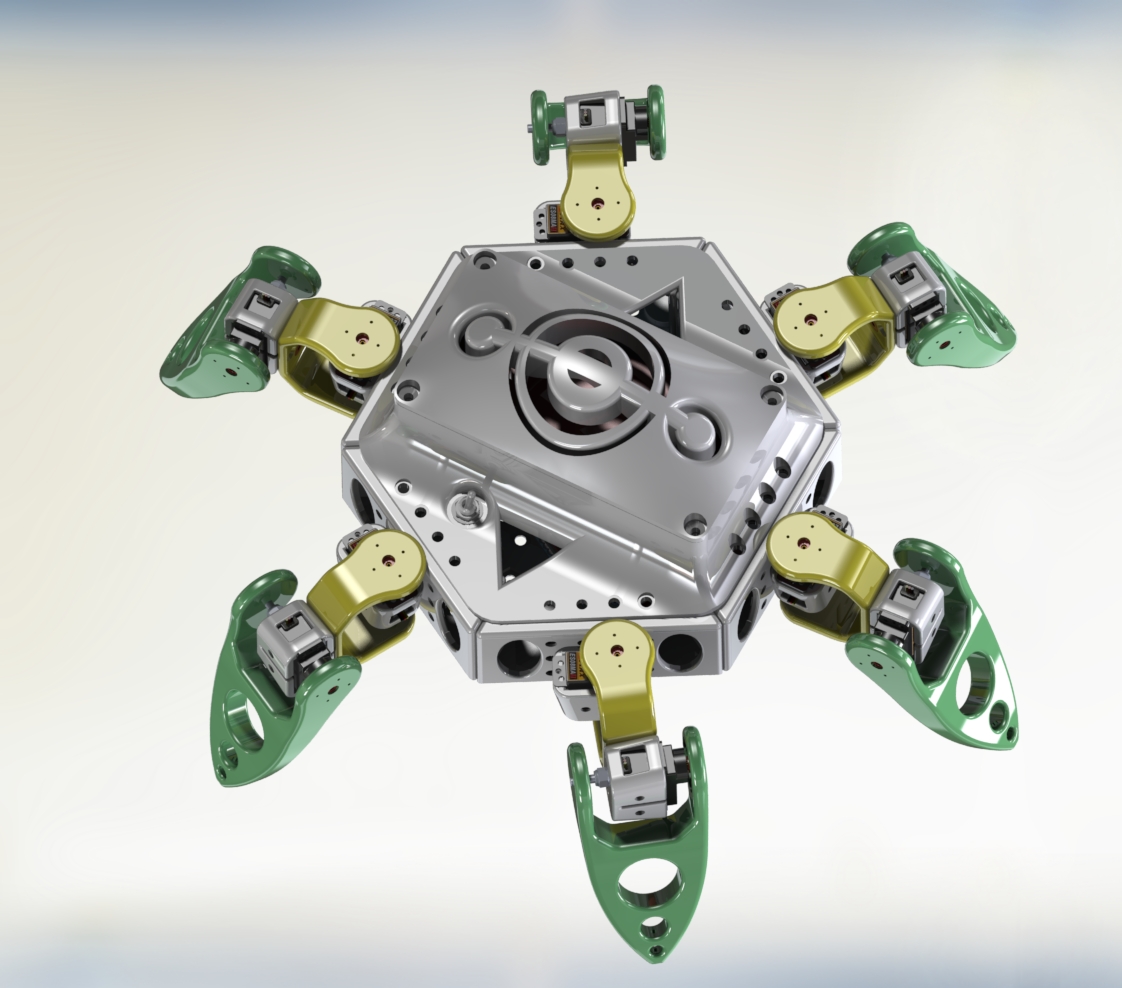
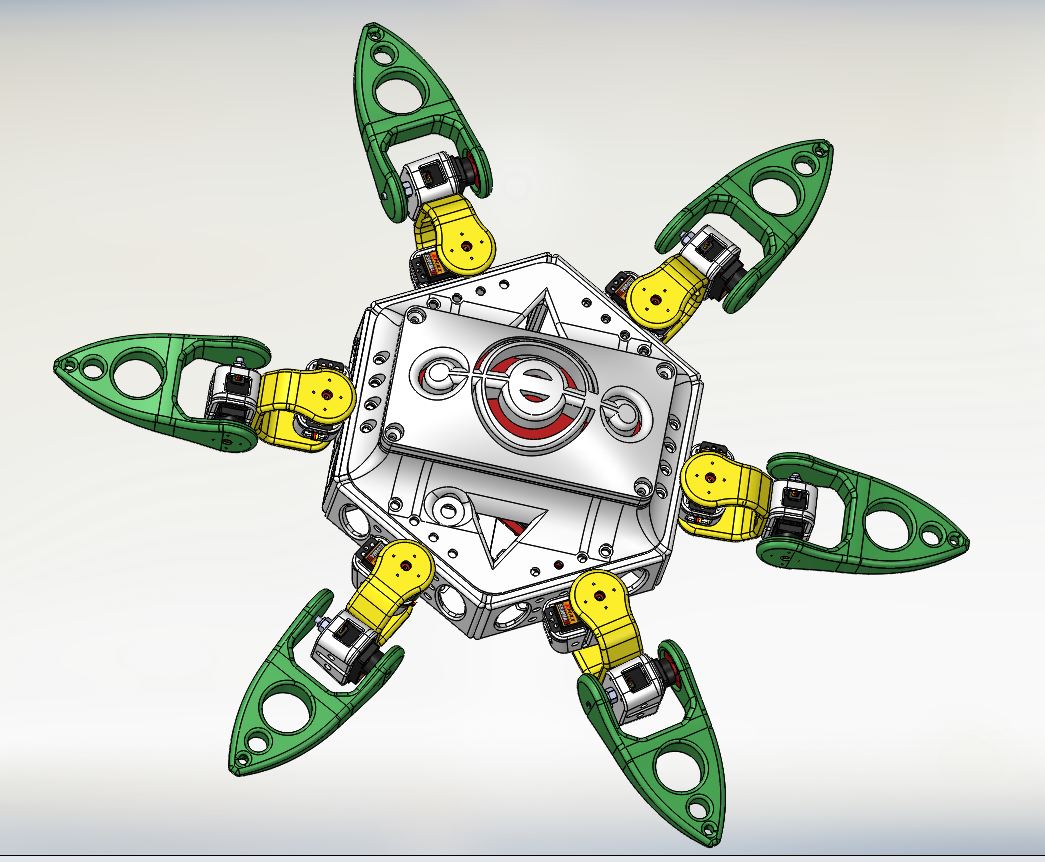
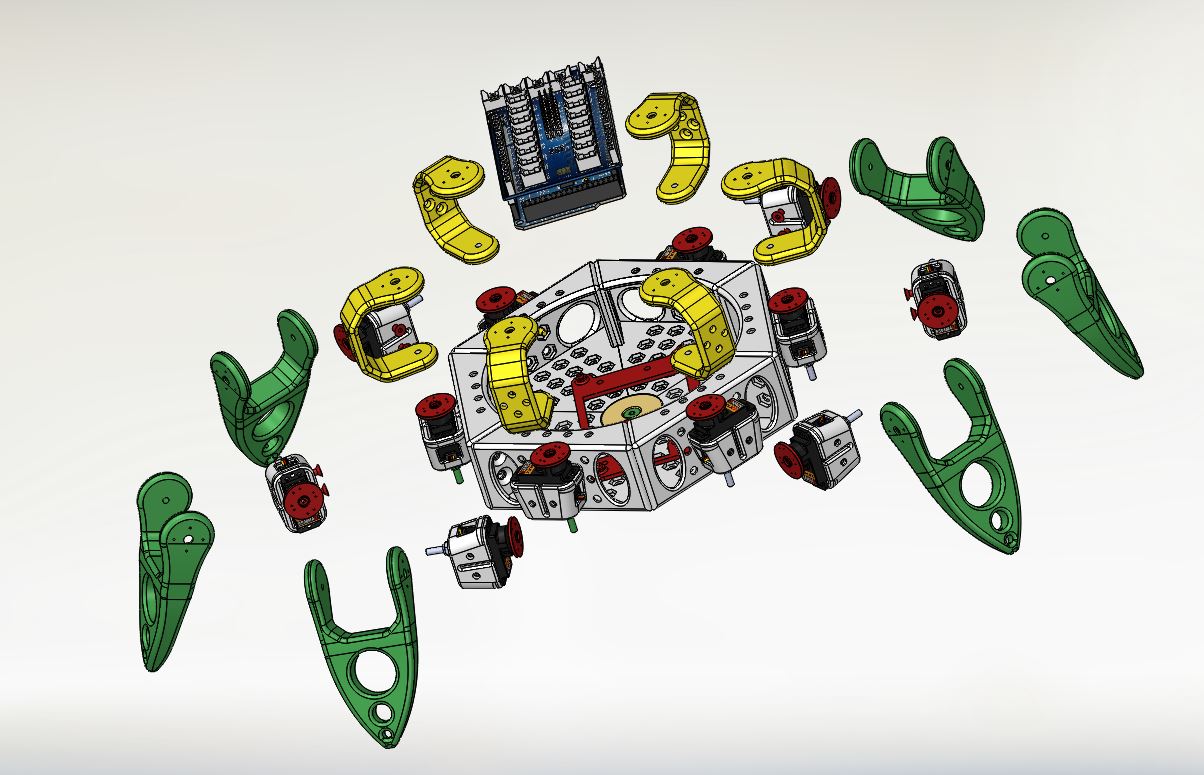
Mise à jour le 29/06/2019: Retrouvez sur cette page l’ensemble des articles concernant le robot Spider S12-PC ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
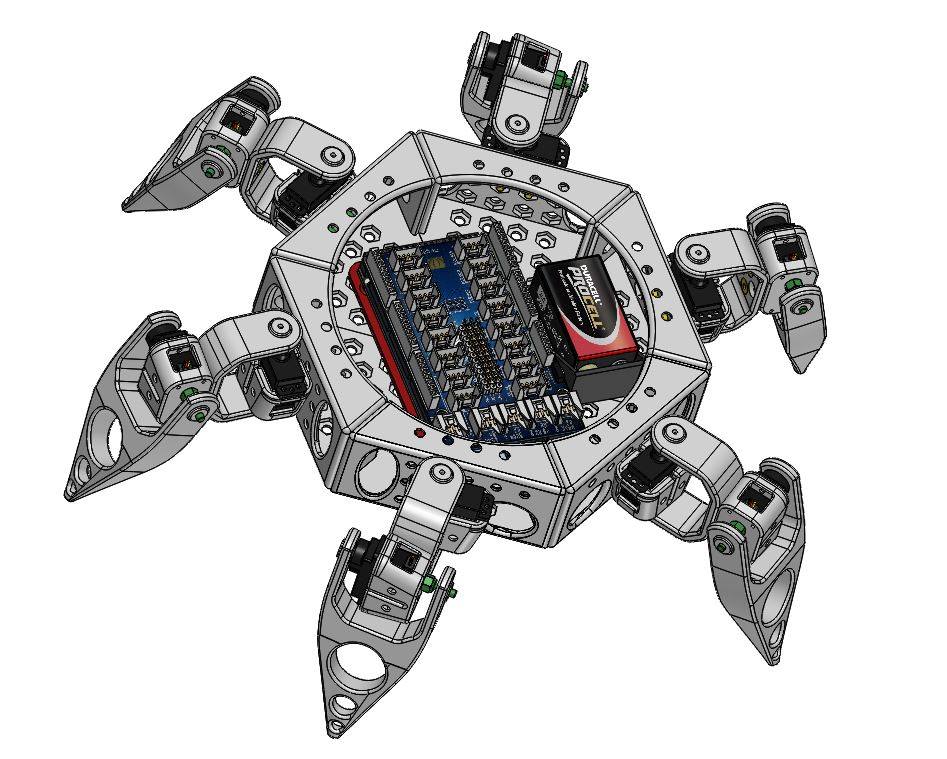
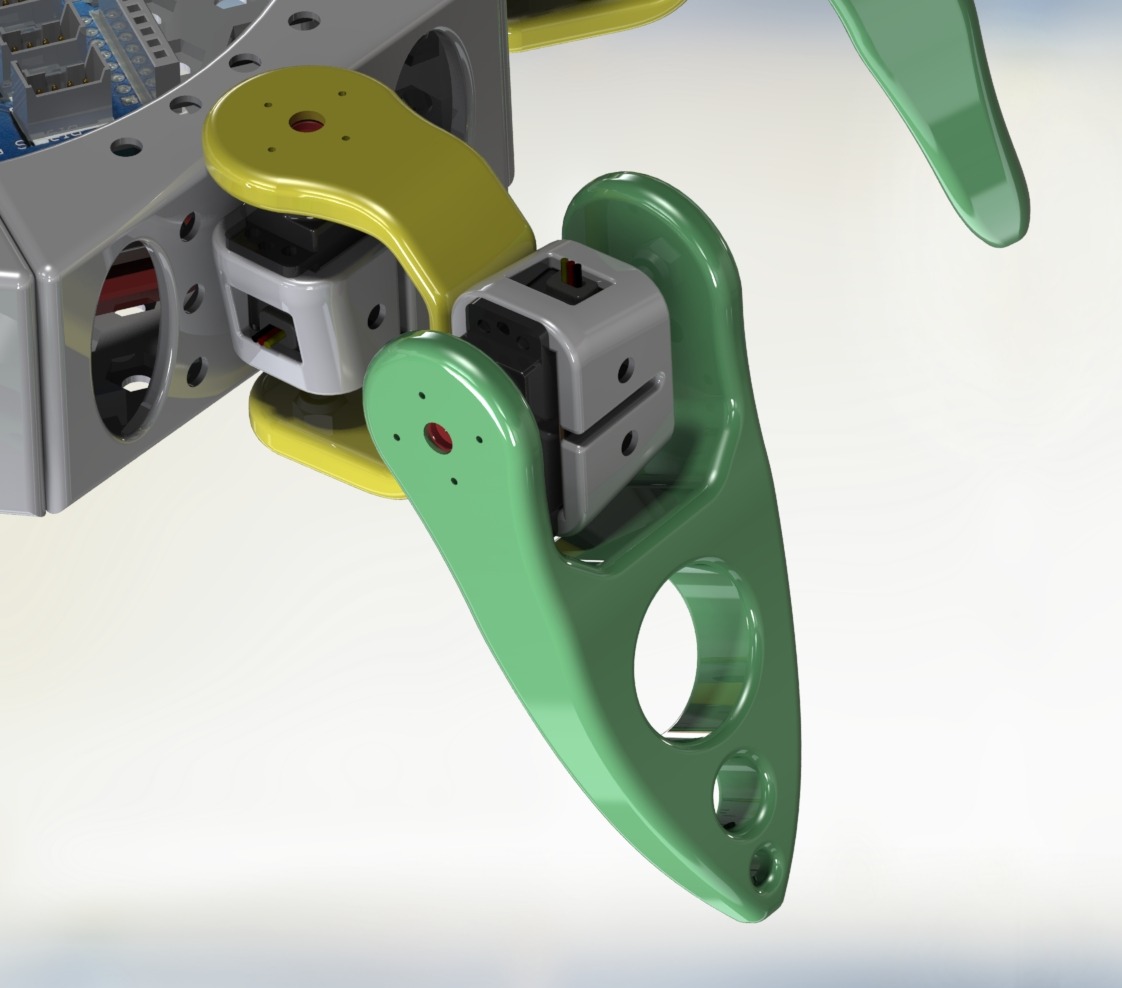
Mini Spider S12 patte courte Version 02022017 – RedOhm
Sommaire :
Vue éclatée de mini Spider S12-PC et l’ensemble des fichiers à télécharger . Version 1.00 |

Vue éclatée de mini Spider S12 Version 1.00 – RedOhm
Vue de la patte et de son servomoteur – RedOhm –
Ensemble des fichiers à télécharger pour imprimer Spider version 1.00
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
![]()
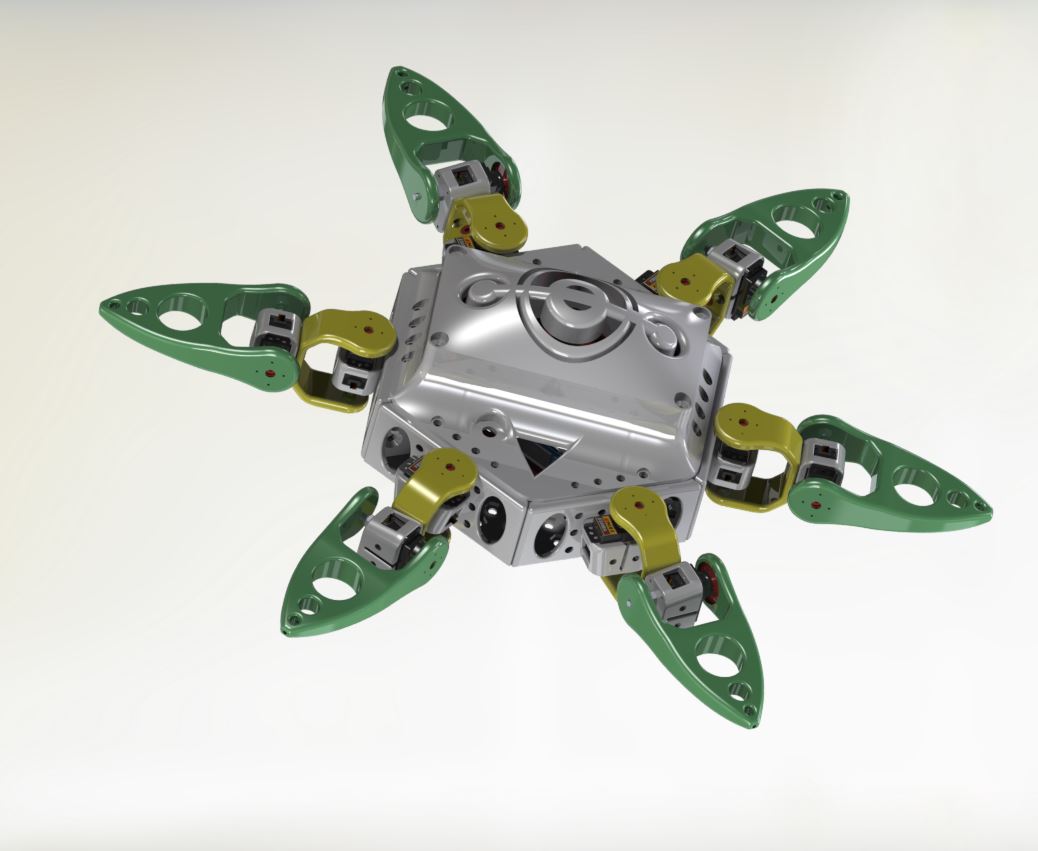
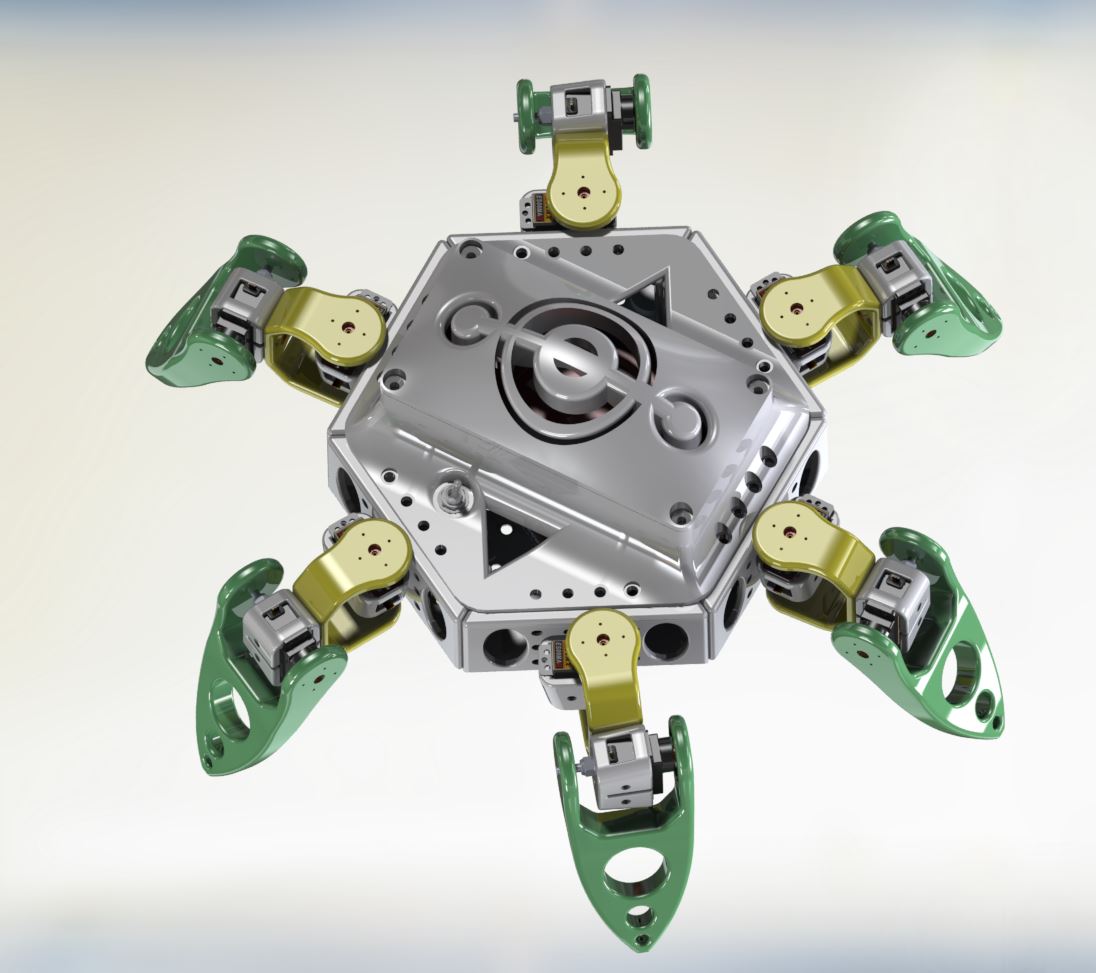
Vue éclatée de mini Spider S12-PC pour le choix des pièce et l’ensemble des fichiers à télécharger Version 09-02-2017 |
Spider version 09-02-2017 RedOhm – 001
Spider version 09-02-2017 RedOhm – 002
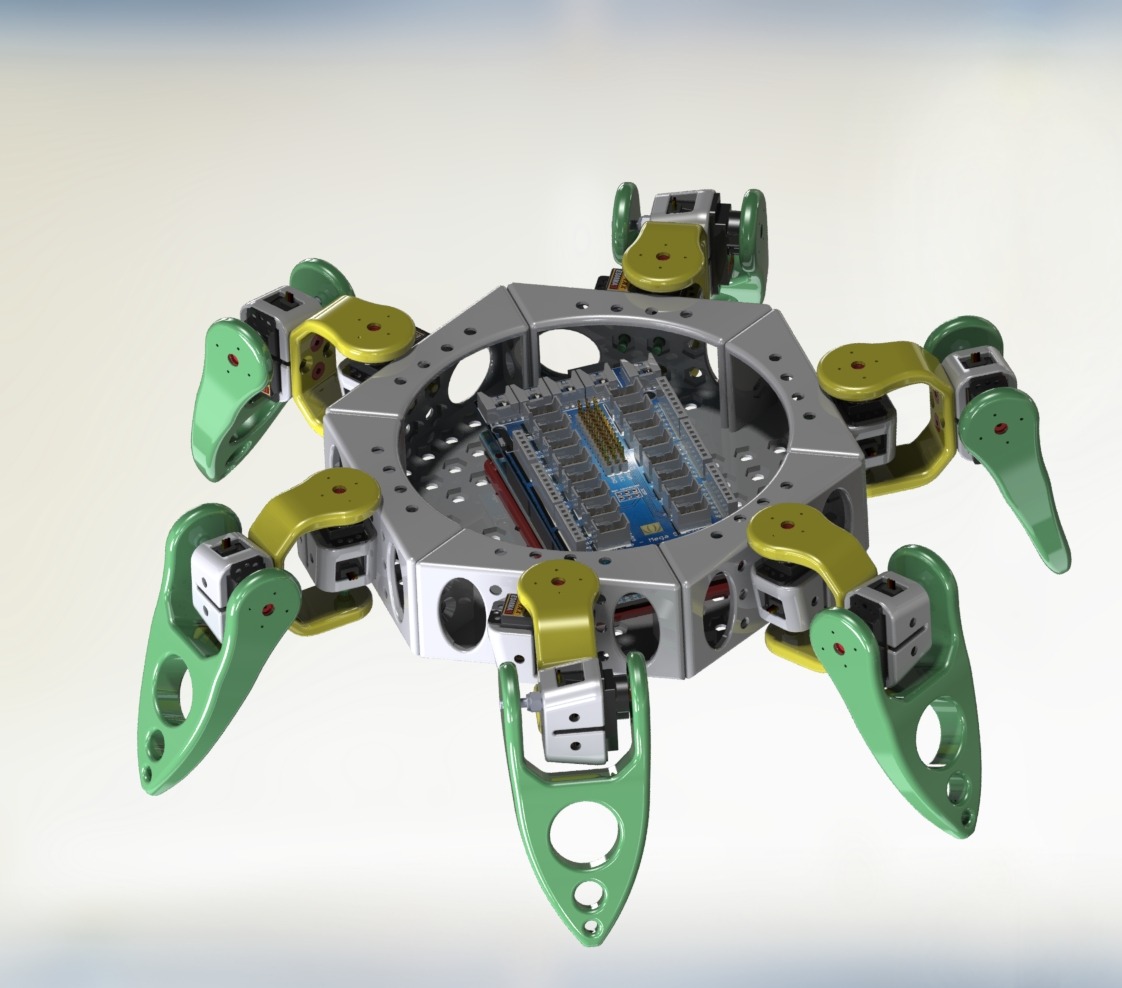
Spider version 09-02-2017 RedOhm – 003
Ensemble des fichiers à télécharger pour imprimer Spider Version 2.00
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
.
![]()
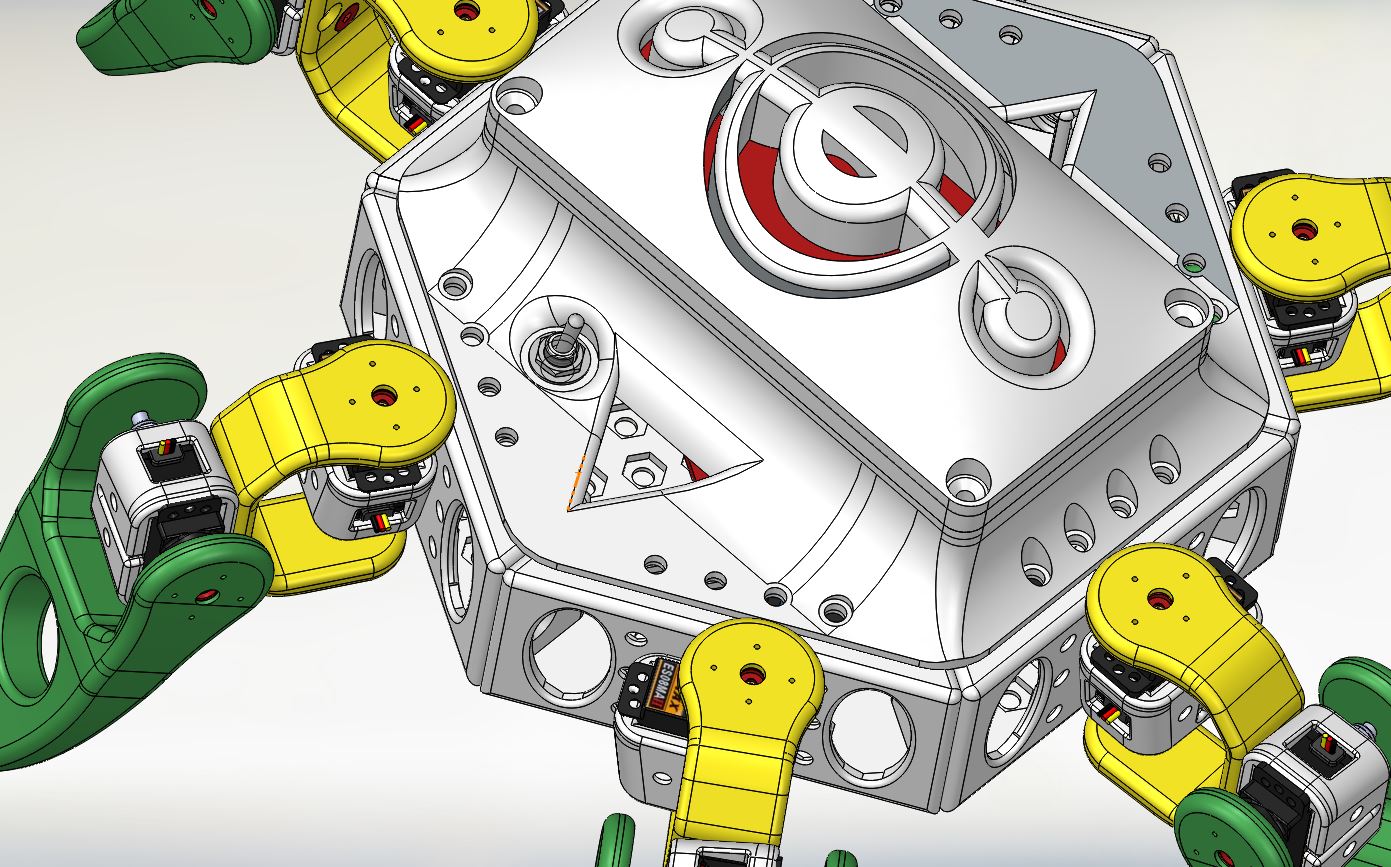
Porte batterie et capot |
.
Ensemble des fichiers à télécharger pour imprimer le capot et le porte batterie
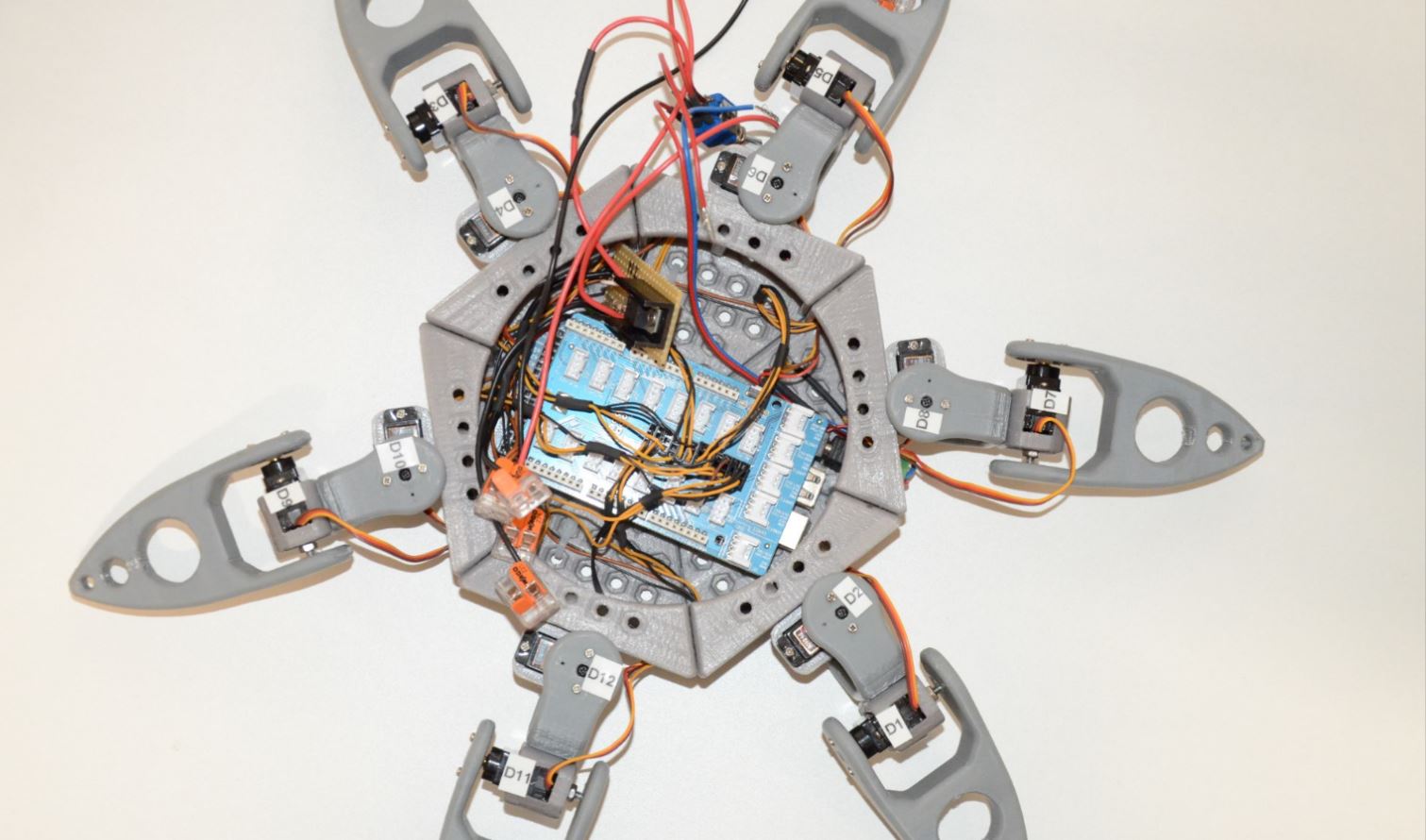
Robot Spider repérage RedOhm
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 |
/* * RedOhm * * * Positionne un servomoteur à son centre * donc à 90° * * Le 06/12/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // le bouton est connecté à la broche 2 de la carte Arduino const int bouton=2; // Variable qui enregistre l'état du bouton int etatdubouton; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { //le bouton est une entrée pinMode(bouton,INPUT); //on initialise l'état du bouton comme "relaché" etatdubouton=LOW; } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de l'etat du bouton etatdubouton=digitalRead(bouton); //test si le bouton a un niveau logique HAUT if (etatdubouton == HIGH) { // associe le servomoteur a la broche 3 monservo.attach(3); // Positionne mon servomteur a 90 monservo.write(90); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } else { // Dissocie la variable monservo de sa broche monservo.detach(); } } |
–
Retour au sommaire![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 |
/* * * * RedOhm * * Initialisation de mini spider * * but : les pattes en bas et droite * enfin un petit bonjour pour nous confirmer * que le robot est en attente * * * Le 28/01/2017 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // lancement d'un petit bonjour servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } // fin du bonjour //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { } // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } |
Retour au sommaire
.
![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 |
/* * * * RedOhm * * Programme enchaînement de divers sous programme * * Initialisation spider * Petit bonjour * Position d'attaque de Spider * Rotation de Spider * * Le 18/02/2017 * H-Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // variable du type int pour le deplacement arriere int arriere =90; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(1500); } //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // appel du sous programme un petit bonjour petit_bonjour(); // temporisation delay(500); // appel du sous programme attaque attaque_spider(); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // temporisation delay(2000); // realisation de 5 pas de rotation for (x=0;x<5;x++){ // appel du sous programme rotation rotation_spider(); delay(300); } } /* * ============================================= * * ensemble de sous programme * * ============================================= */ // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } //========== sous programme petit bonjour ========== void petit_bonjour() { servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } //==================fin du bonjour ====================== //========= position d'attaque de Spider ================ void attaque_spider() { initd=55; initg=125; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); delay(1000); servo_d8.write (40); servo_d10.write (140); delay(1000); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(1000); for (x=0;x<5;x++){ initd=135; servo_d1.write (initd); servo_d11.write (initd); delay(300); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(300); } } //====== position d'attaque de Spider ======= void rotation_spider() { //===== rotation de spider ================== //patte 1 servo_d1.write (25); delay (200); servo_d2.write (50); delay (200); servo_d1.write (5); delay (200); //patte 2 servo_d11.write (25); delay (200); servo_d12.write (50); delay (200); servo_d11.write (5); delay (200); //patte3 servo_d9.write (25); delay (200); servo_d10.write (50); delay (200); servo_d9.write (5); delay (200); //patte4 servo_d3.write (150); delay (200); servo_d4.write (50); delay (200); servo_d3.write (175); delay (200); //patte 5 servo_d5.write (150); delay (200); servo_d6.write (50); delay (200); servo_d5.write (175); delay (200); //patte6 servo_d7.write (150); delay (200); servo_d8.write (50); delay (200); servo_d7.write (175); delay (200); // position des pattes en arriere arriere=130; // position des pattes au centre servo_d2.write (arriere); servo_d4.write (arriere); servo_d6.write (arriere); servo_d8.write (arriere); servo_d10.write (arriere); servo_d12.write (arriere); delay(500); } //=====Fin de rotation de spider ===================== |
![]()
La série de régulateurs à trois broches LM78XX est disponible dans de nombreuses valeurs de tensions de sortie fixes et est très utile dans nombre d’applications. Bien que conçus pour fournir des tensions de sortie fixes, ces circuits peuvent également délivrer des tensions et courants réglables à l’aide de quelques composants extérieurs
La série LM78XX est disponible en boîtier aluminium TO-220 et peut délivrer jusqu’à 1 A si on utilise un refroidisseur approprié. Ce boîtier possède une limitation en courant interne pour ne pas dépasser les limites de sécurité en courant de pointe. Une plage de sécurité est prévue pour le transistor de sortie permettant de limiter la puissance interne dissipée. Si celle-ci devient trop importante pour le refroidisseur utilisé, le circuit de disjonction thermique est activé pour éviter une surchauffe du circuit intégré.
Archive de l’article : ROBOT MAYA – Module Ez-Robot pour le pilotage de Maya avec Arduino derniere remise à jour le 11/02/2017 . Chez RedOhm , nous avons pris l’habitude de consever les anciennes notices de logiciel ou de matériel .Voici donc une version que nous utilisions pour la période 2016 à septembre 2017. Cette version est la version logiciel 2016–06–11–00.
Retrouvez sur cette page l’ensemble des articles concernant le robot Maya ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
Maya version 1.00 – RedOhm
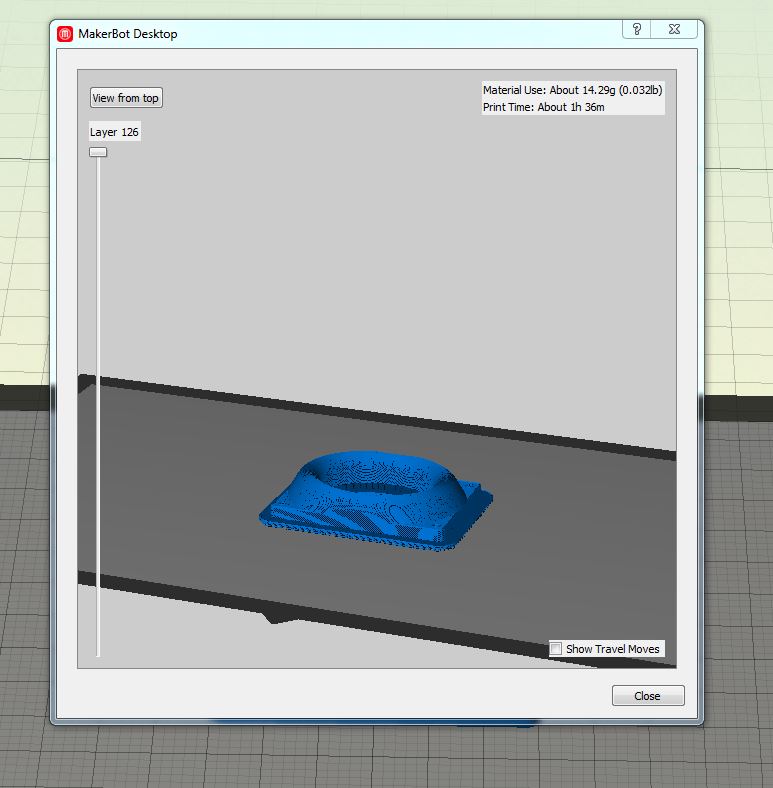
![]()
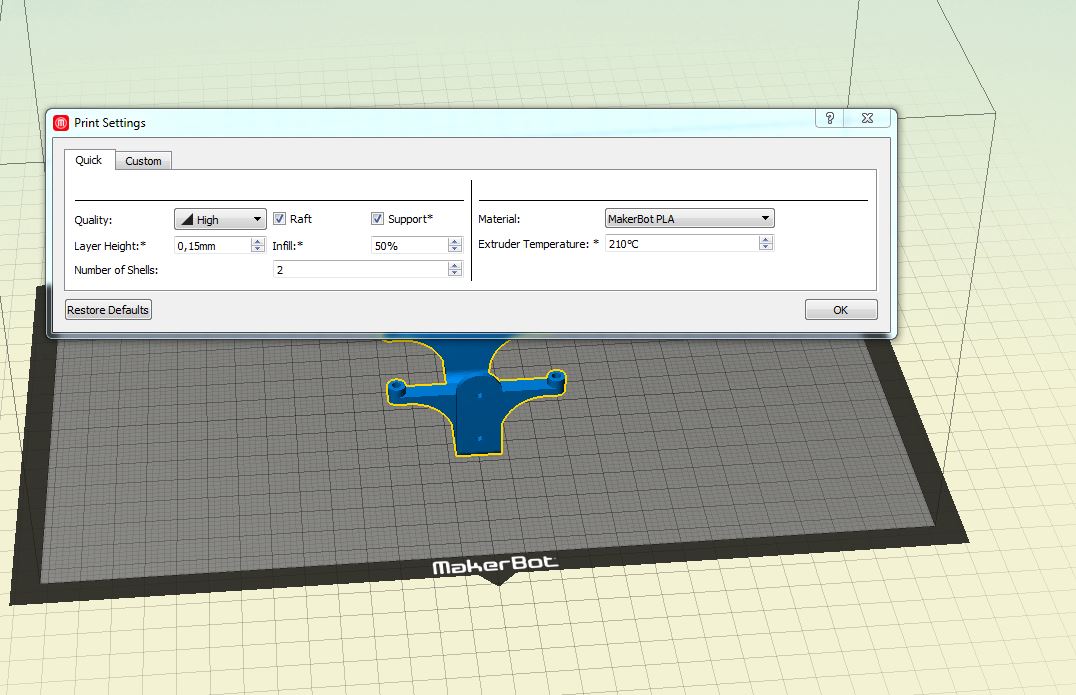
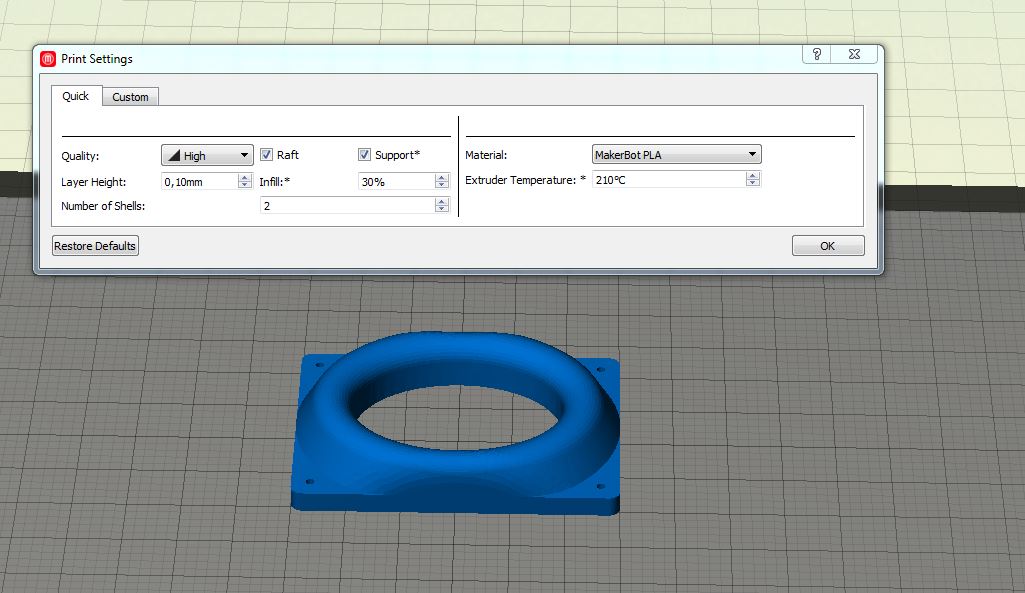
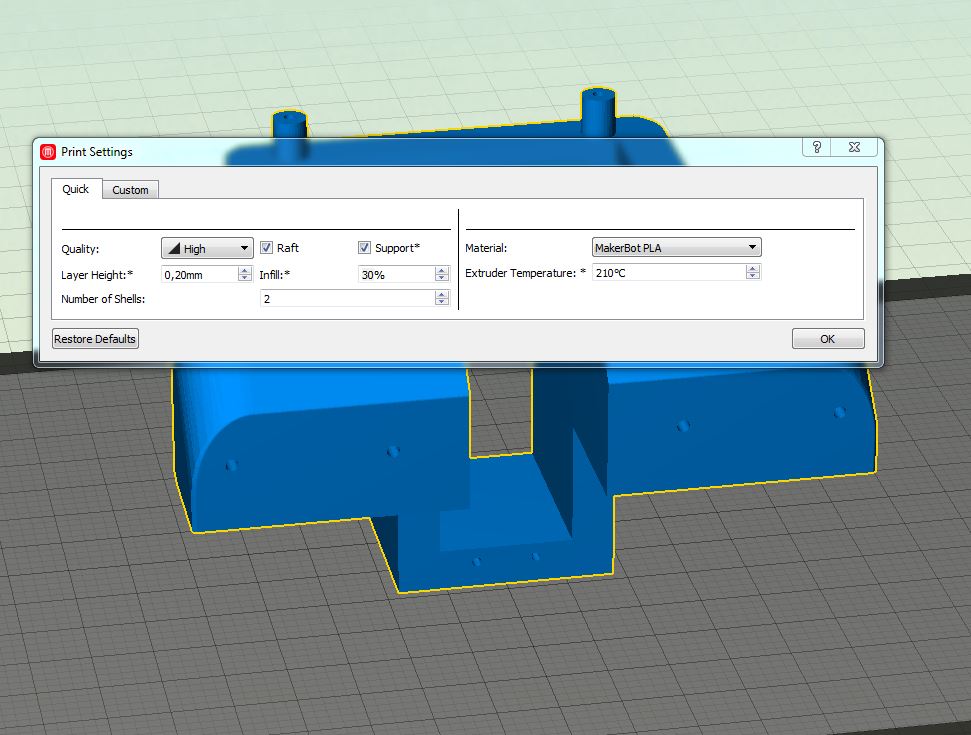
Information |
Vous avez sur cette page les principaux paramètres entre autre, la vitesse ,la température , la qualité d’impression ainsi que le poids de la matière et le temps pour réaliser votre pièce .L’ensemble de ces paramètres est applicable pour l’imprimante Replicator 2 en version PLA (il suffira d’adapter ces paramètres pour un autre type d’imprimante 3D ) .
Pour ses impressions nous avons utilisé du fil PLA 1.75 de chez Verbatim. Voir La liste pour les imprimantes compatibles . Voici le lien -> Verbatim imprimante.
Note : Pour ABS
Nous avons testé ces pièces en impression pour l’ABS
Utilisez une imprimante carénée avec une chambre d’impression chauffée de préférence .
Nous obtenons de bon résultat avec une température d’extrudeur de 220°C et avec un lit chauffé à 80°C ( si l’imprimante est carénée ) afin d’éviter les déformations dues au refroidissement du plastique lors de l’impression.
Pour les imprimantes non carénée la température du plateau chauffant recommandé (80 à 120°C).
Vérifiez si votre plateau est de niveau .
Vérifiez que votre plateau soit bien droit et l’espace buse plateau soit respecté en tous points , sinon, mettez-le de niveau et réglez votre espace buse plateau .Ne lancez l’impression que lorsque l’imprimante et le plateau sont calibrés correctement.
Vérifiez que vous avez assez de filament .
Vérifiez que votre filament soit bien chargé sur son support à bobine , et contrôlez le poids de votre bobine moins la tare + 20% correspondant au poids total de la pièce à imprimer en fonction des paramètres joints sur le tableau récapitulatif.
Contrôle de l’extrudeur .
Il est important de vérifier si l’extrudeur et la buse sont propres surtout avant d’imprimer de grosse pièce.
| Retour au sommaire |
![]()
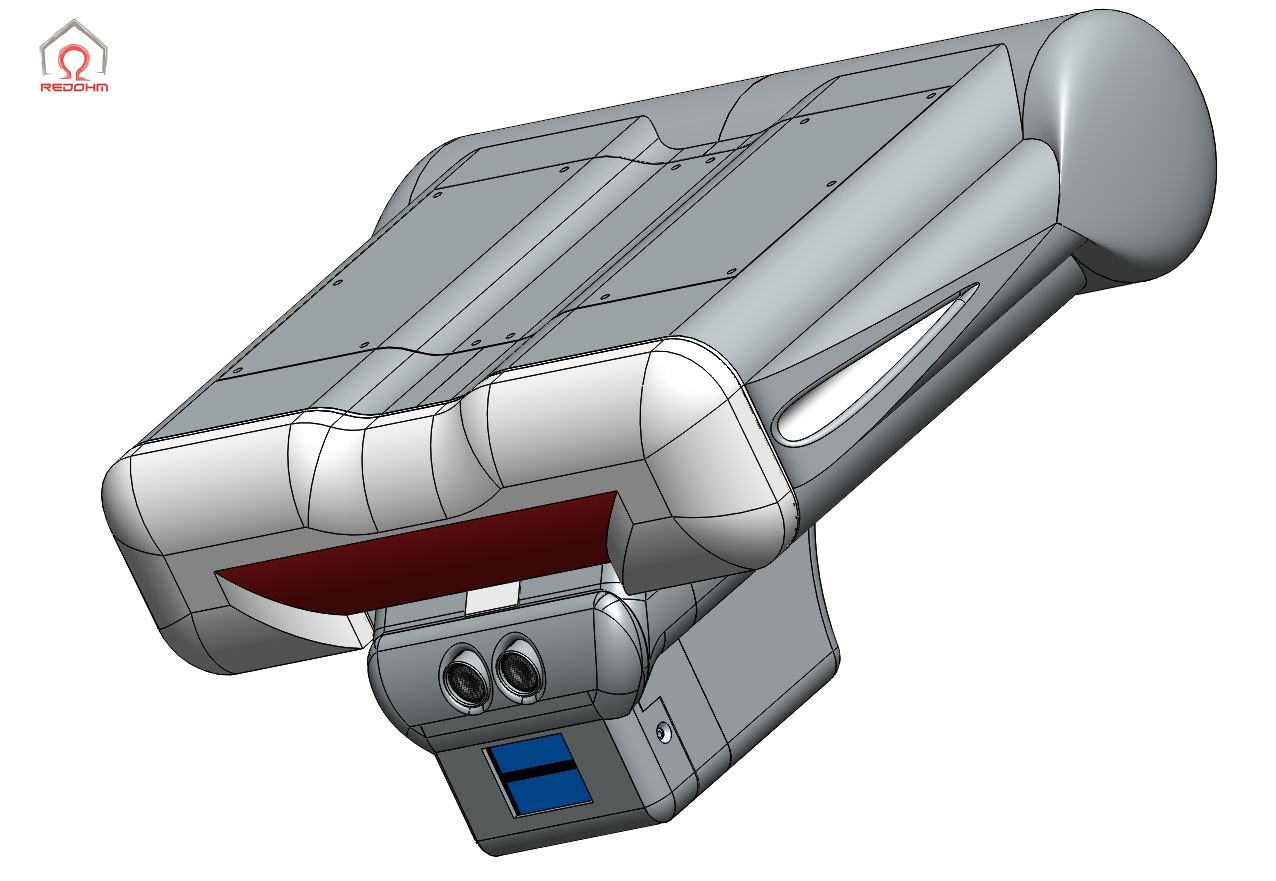
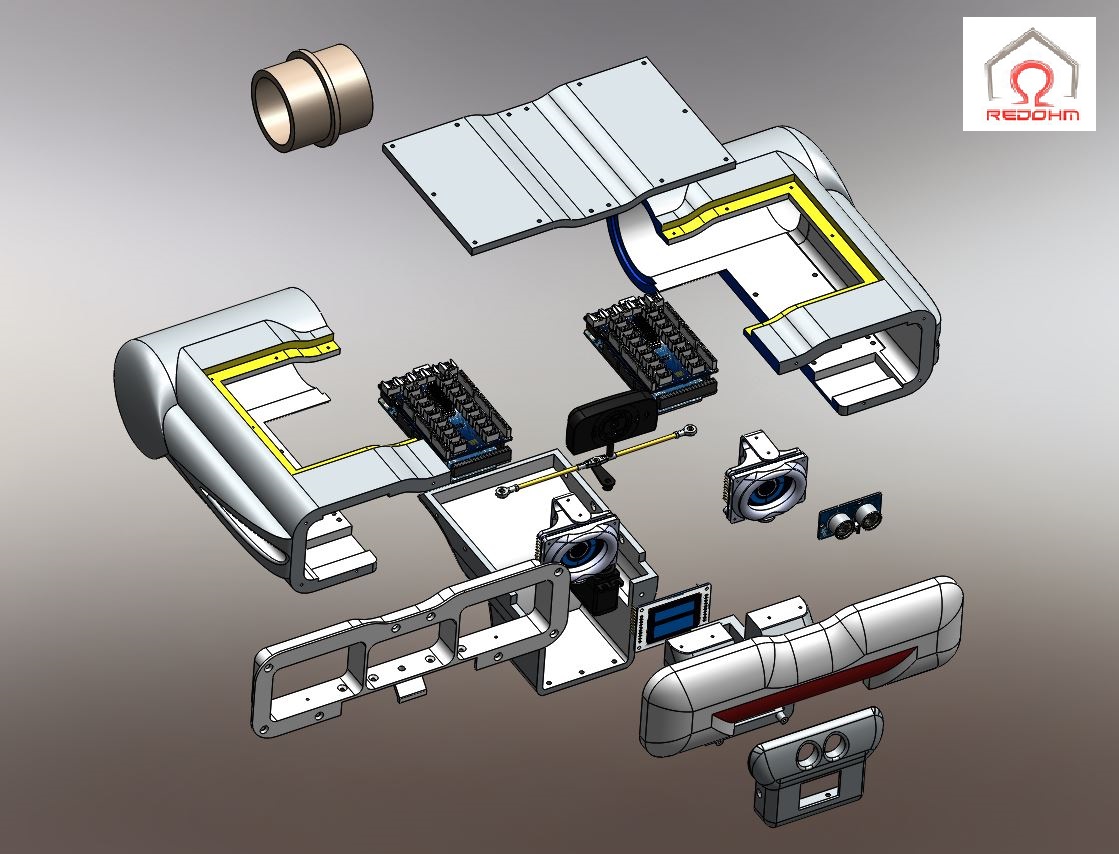
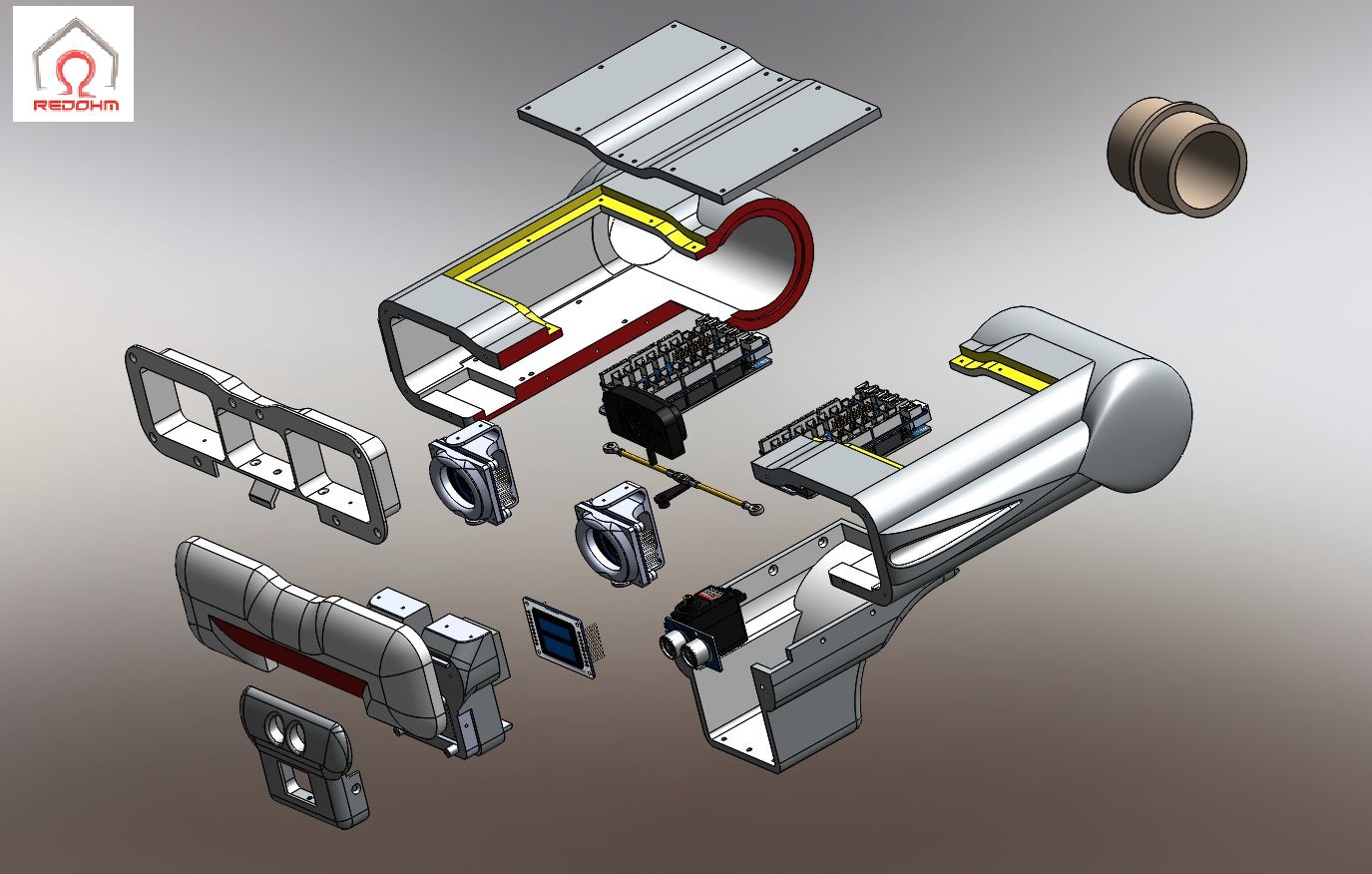
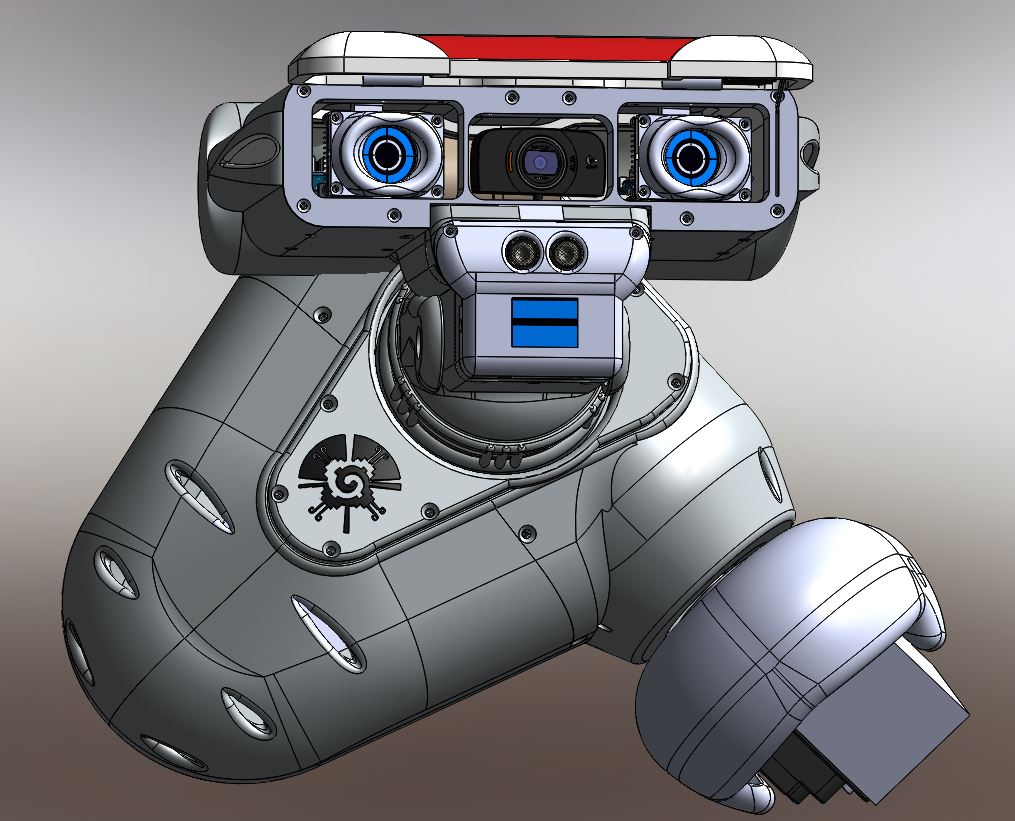
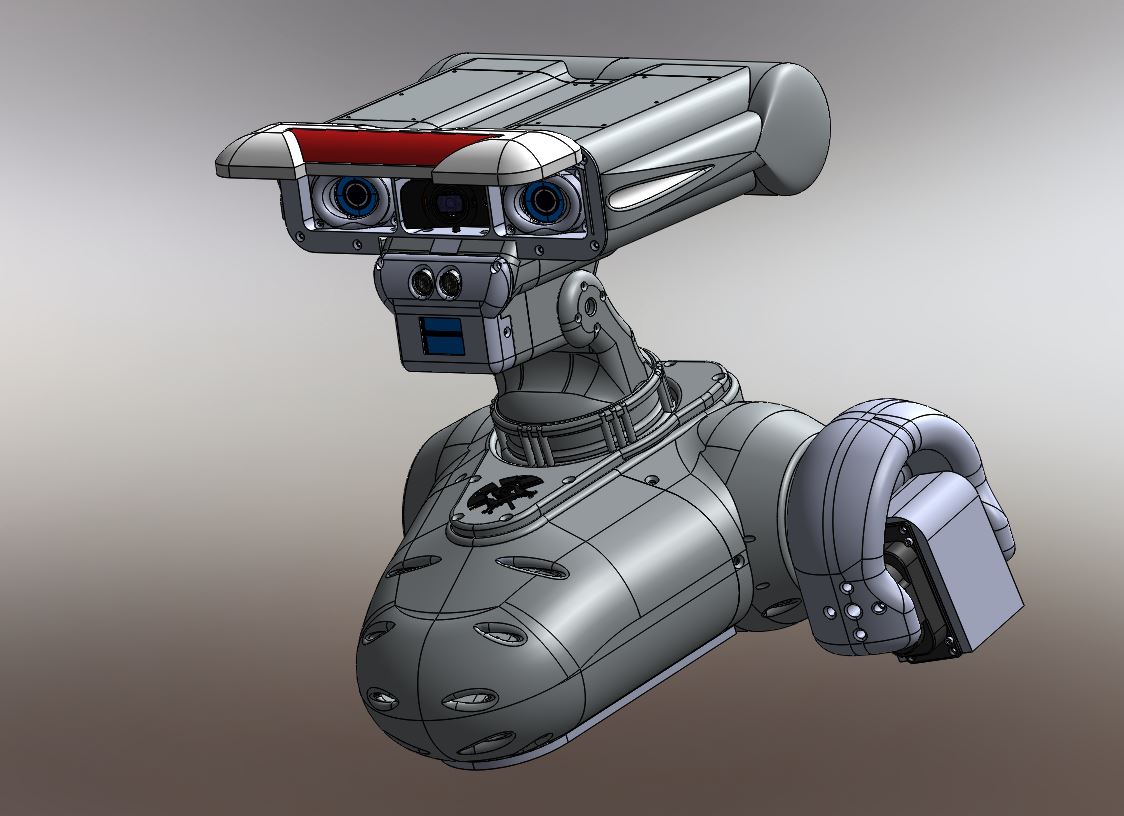
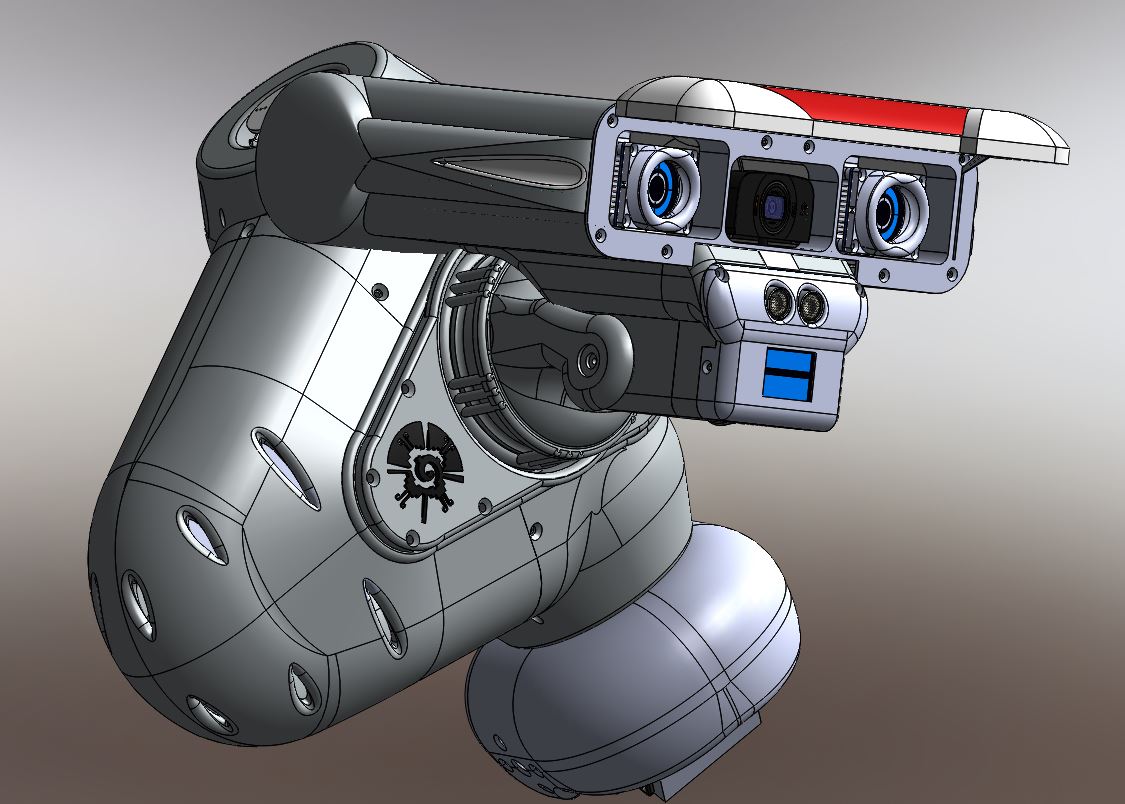
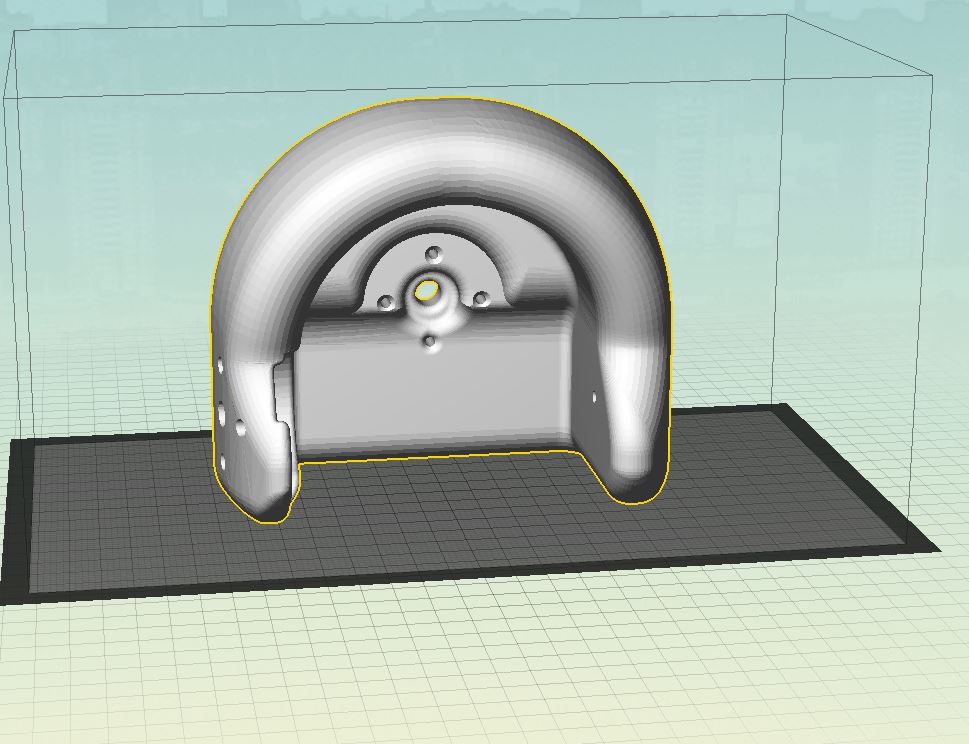
Vue éclatée de la tête de Maya pour le choix des pièces |
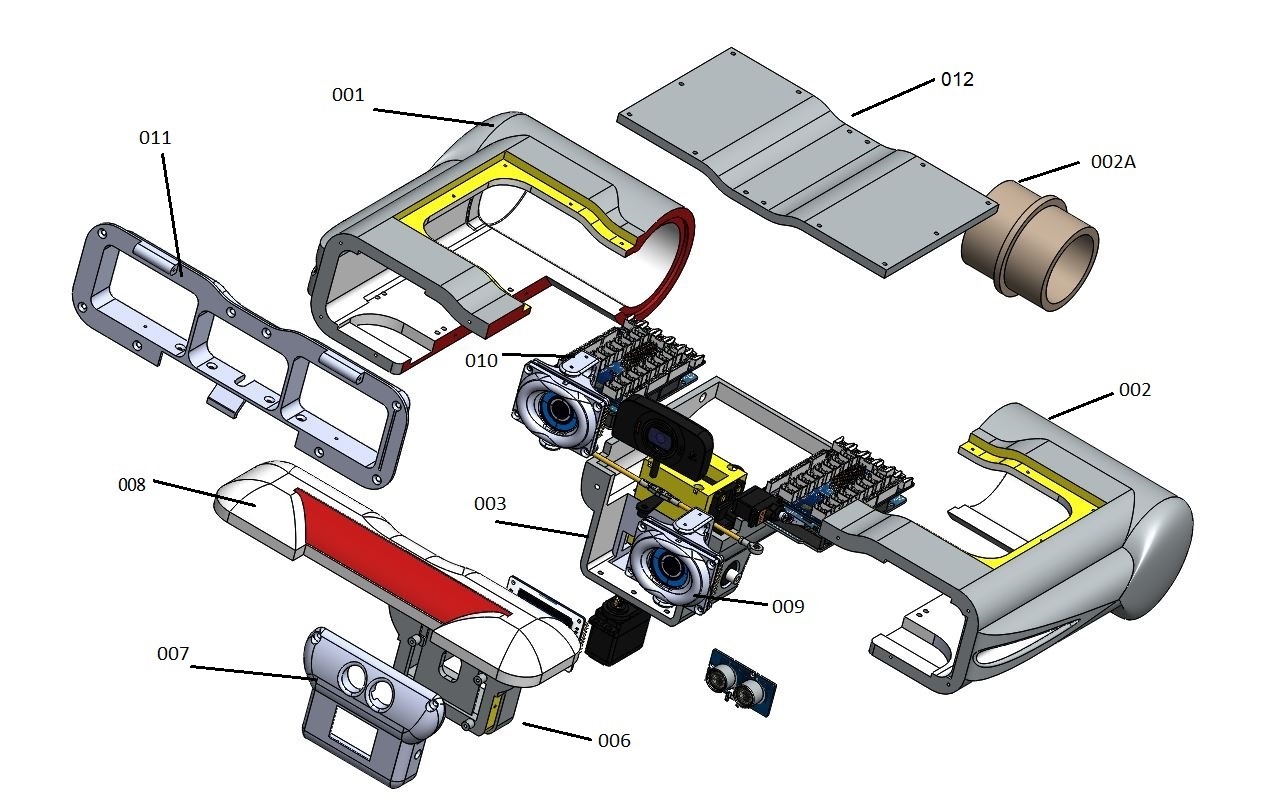
Vue éclatée de la tête de Maya pour le choix des pièces – RedOhm
| Retour au sommaire |
![]()
Ensemble des fichiers à télécharger
|
Robot Maya encéphale gauche pièce 001 – RedOhm
Information pour l’impression :
– Temps de réalisation : 68h20mm
– Matière : 830 g
– Type de Matière : PLA dans ce cas
– Remplissage : 40%
– Définition : Haute
– Température : configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour PLA : Un lit chauffé à 40°C
| Remarque et modification : Préféré l’utilisation du PLA pour les objets de grande surface . Réalisation de la pièce sur imprimante Zortrax M200 Le temps de réalisation de la pièce dépend en grand partie du type de finition , exemple pour une finition normal le temps sera de 46h43mm et en matière 557g . A savoir sur l’imprimante Replicator 2 nous étions à 32 h10mm pour un remplissage de 20% et un poids de 490 g |
||
| Volume utile sur l’imprimante : 724 cm3 | ||
| Longueur : 242 mmm | Largeur : 85 mm | Hauteur : 148 mm |
| Retour au sommaire |
![]()
Robot Maya encéphale droit pièce 002 – RedOhm
Information pour l’impression :
– Temps de réalisation :68h25mm
– Matière : 845g
– Type de Matière : PLA dans ce cas
– Remplissage : 40%
– Définition : Haute
– Température : configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour PLA : Un lit chauffé à 40°C
| Remarque et modification : Même commentaire que ci-dessus . Préféré l’utilisation du PLA pour les objets de grande surface . Réalisation de la pièce sur imprimante Zortrax M200 Le temps de réalisation de la pièce dépend en grand partie du type de finition , exemple pour une finition normal le temps sera de 46h52mm et en matière 570g . A savoir sur l’imprimante Replicator 2 nous étions à 32 h10mm pour un remplissage de 20% et un poids de 490 g |
||
| Volume utile sur l’imprimante : 726cm3 | ||
| Longueur : 242 mm | Largeur : 85 mm | Hauteur : 148 mm |
Maya ensemble des 2 encéphales RedOhm ( Reproduit par Davy en PLA de chez Ariane-plas )
Fournisseur pour la réalisation ci-dessus : Ariane-plas
| Retour au sommaire |
![]()
Robot Maya raccord tête 002A – RedOhm
Information pour l’impression :
– Temps de réalisation :3h58mm
– Matière : 60.84 g (0.134ib)
– Type de Matière : ABS ou PLA ou HIPS
– Remplissage : 30%
– Définition : Haute
– Température : 250°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : Préféré l’utilisation de l’ABS ou du HIPS. L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles . |
||
| Volume utile sur l’imprimante : 65cm3 | ||
| Longueur : 71mm | Largeur : 71mm | Hauteur :64 |
| Retour au sommaire |
![]()
Robot Maya mâchoire pièce 003 – RedOhm
Information pour l’impression :
– Temps de réalisation :12h20mm
– Matière : 193.72 g (0.427ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : 178 cm3 | ||
| Volume utile sur l’imprimante : | ||
| Longueur : 155 mm | Largeur : 110 mm | Hauteur : 85 mm |
| Retour au sommaire |
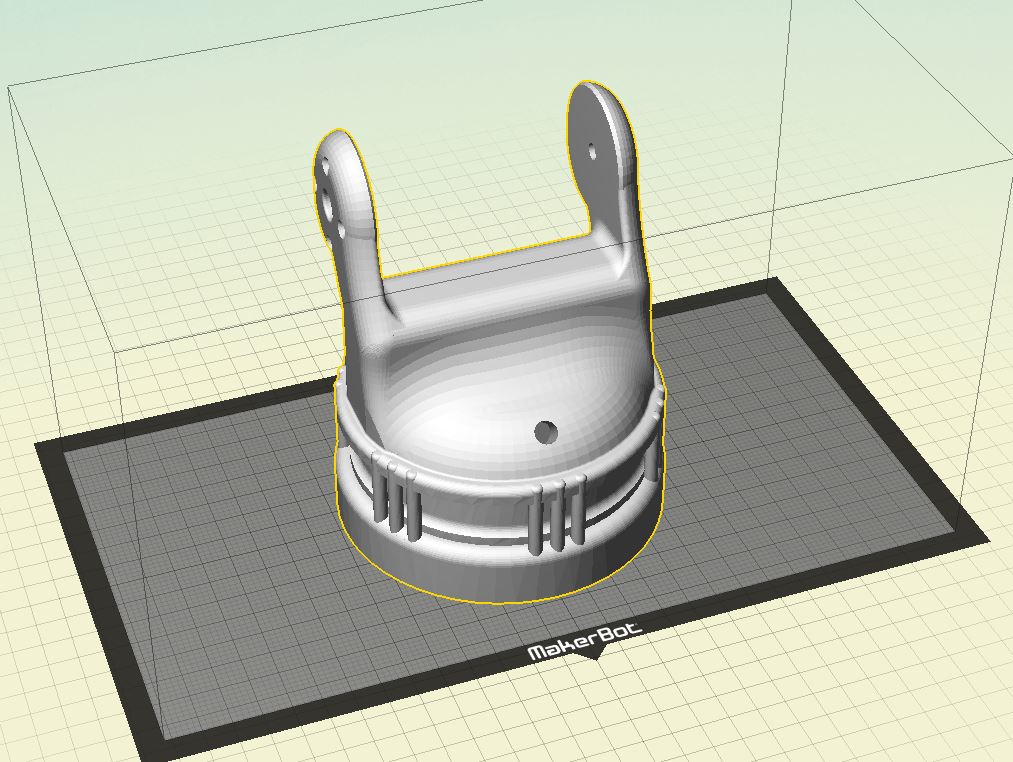
![]()
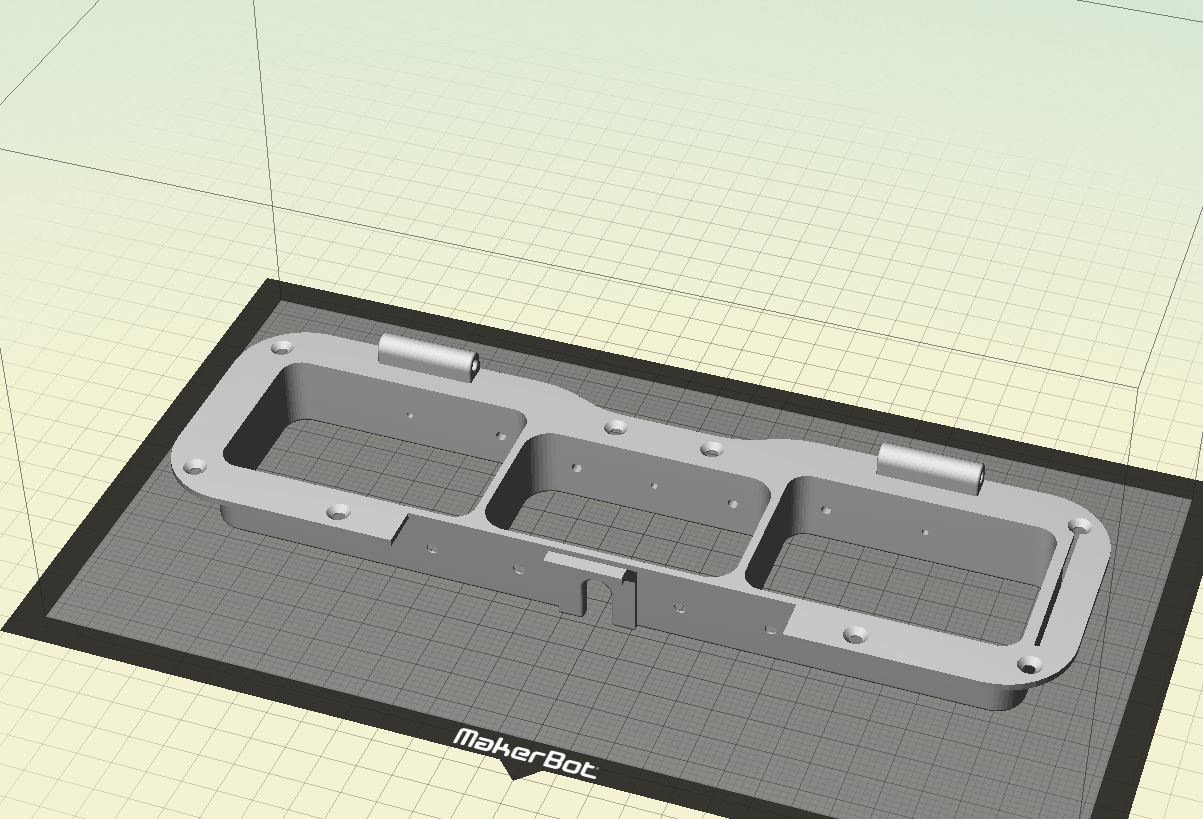
Robot Maya base de cou plat pièce 025 – RedOhm
Information pour l’impression :
– Temps de réalisation :14h50mm
– Matière : 262.31 g (0.578ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : 03/12/2016 : Sur la version 1.00 , nous avons modifié la portée de la butée à billes, et nous avons ajouté une décoration à la base du support (papillon galactique symbole Maya) |
||
| Volume utile sur l’imprimante : 304 cm3 | ||
| Longueur : 225 mm | Largeur : 150 mm | Hauteur : 30 mm |
| Retour au sommaire |
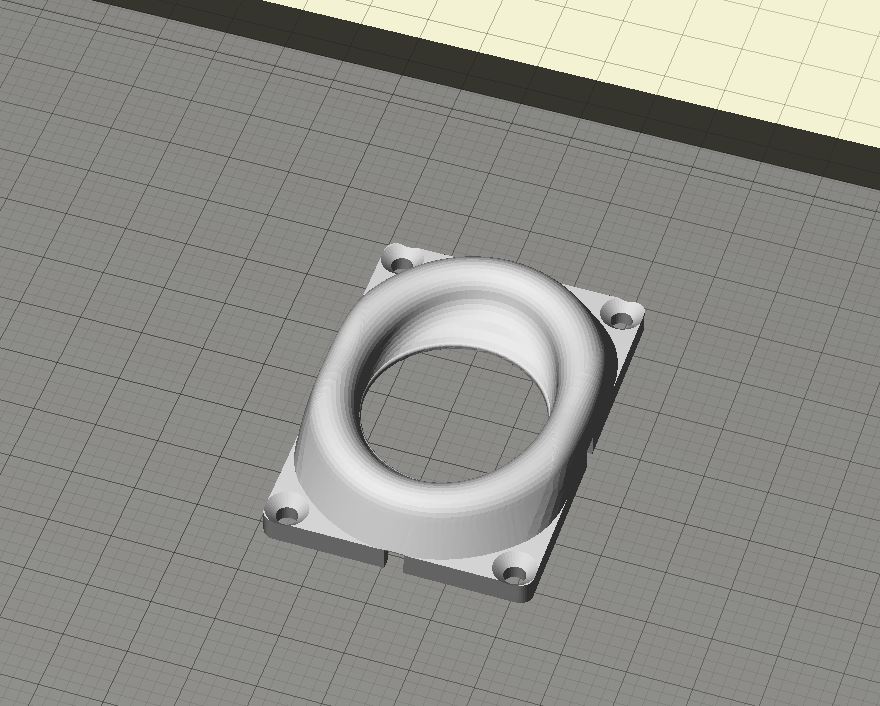
![]()
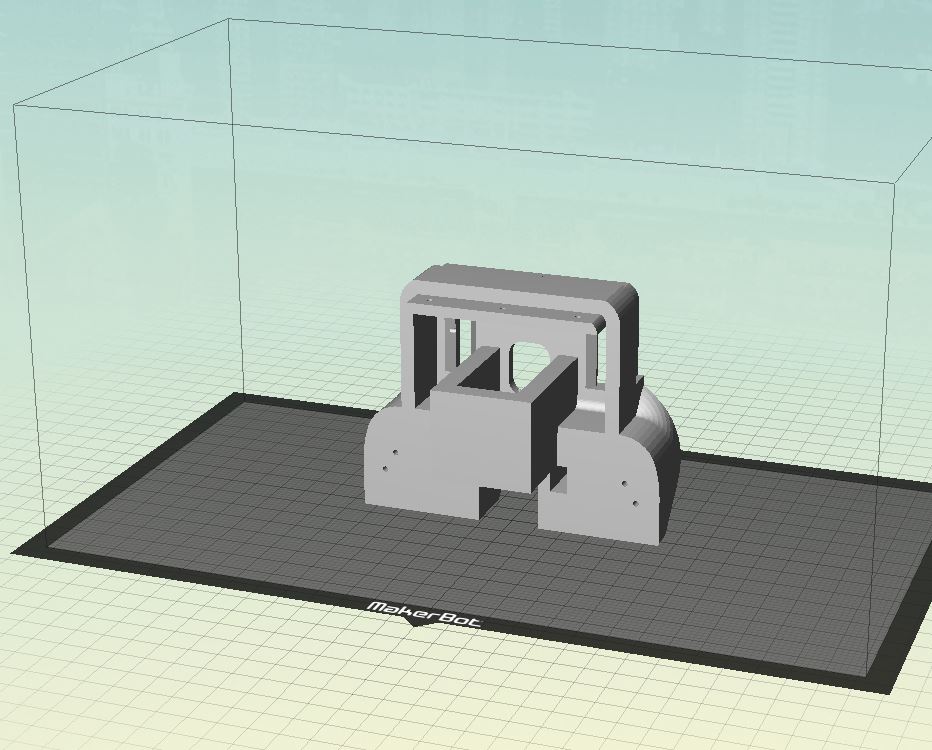
Robot Maya cou pièce 026 – RedOhm
Information pour l’impression :
– Temps de réalisation :15h59mm
– Matière : 263.49 g (0.581ib)
– Type de Matière : ABS ou PLA ou HIPS
– Remplissage : 30%
– Définition : Haute
– Température : configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : Préféré l’utilisation de l’ABS ou du HIPS. L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles . |
||
| Volume utile sur l’imprimante : 533 cm3 | ||
| Longueur : 117 mm | Largeur : 117 mm | Hauteur : 144 mm |
| Retour au sommaire |
![]()
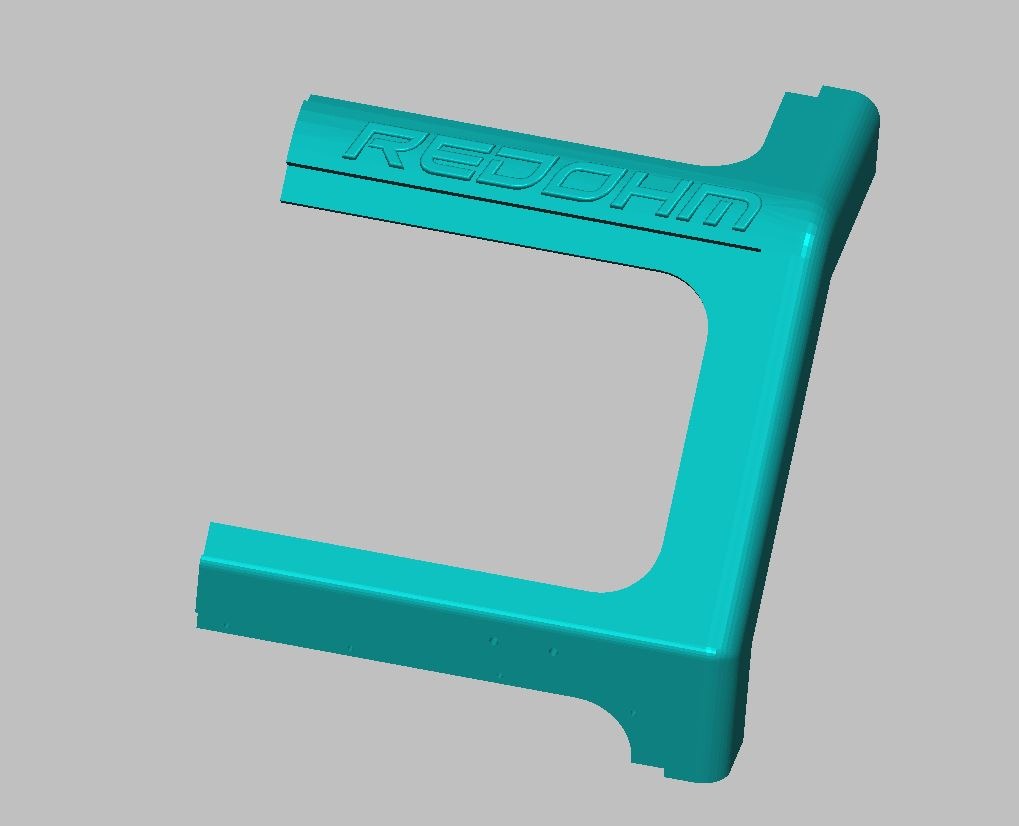
Robot Maya masque avant pièce 006 – RedOhm
Information pour l’impression :
– Temps de réalisation :7h18mm
– Matière : 114.66 g (0.253b)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : Le 09/12/2016 : Version 3.00 . Préféré l’utilisation de l’ABS ou du HIPS. L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles . |
||
| Volume utile sur l’imprimante : 152cm3 | ||
| Longueur : 110 mm | Largeur : 80 mm | Hauteur : 62 mm |
| Retour au sommaire |
![]()
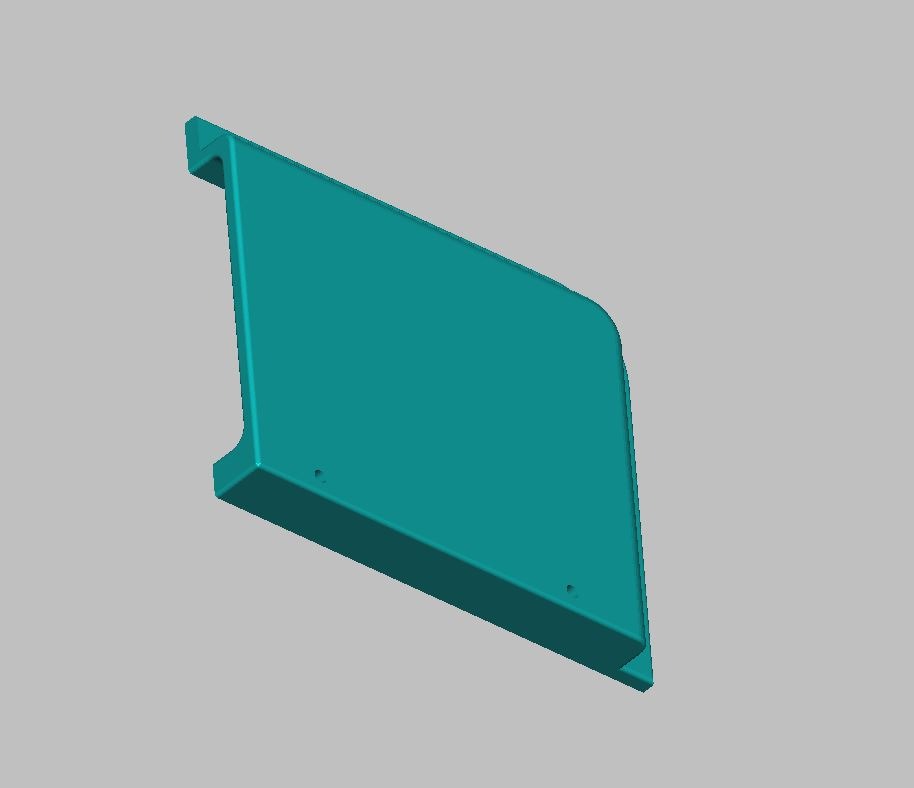
 Information pour l’impression :
Information pour l’impression :
– Temps de réalisation :5h18mm
– Matière : 63 g
– Type de Matière :ABS ou PLA ou HIPS
– Remplissage : 40%
– Définition : Haute
– Température :configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour PLA : Un lit chauffé à 40°C
| Remarque et modification : 18 cm3 Dans notre cas la réalisation à était effectuée en PLA . L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles |
||
| Volume utile sur l’imprimante : | ||
| Longueur : 108 mm | Largeur : 77mm | Hauteur : 23 mm |
| Retour au sommaire |
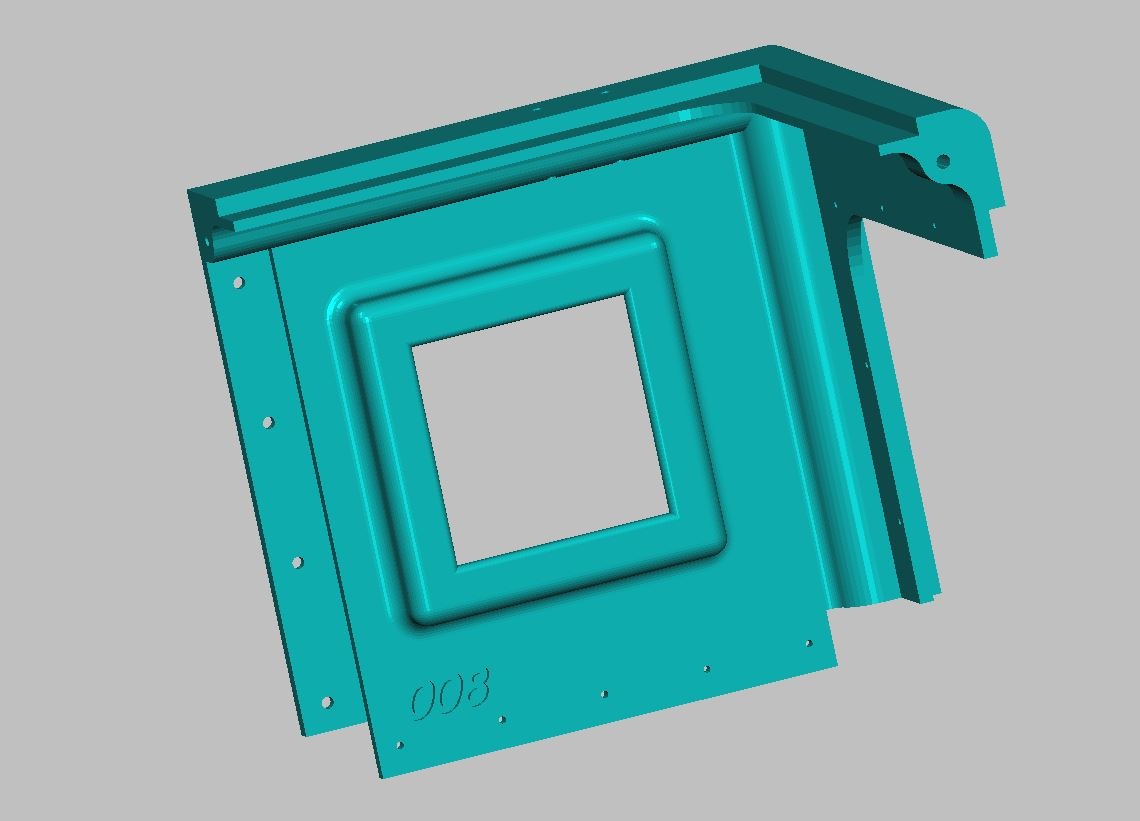
![]()
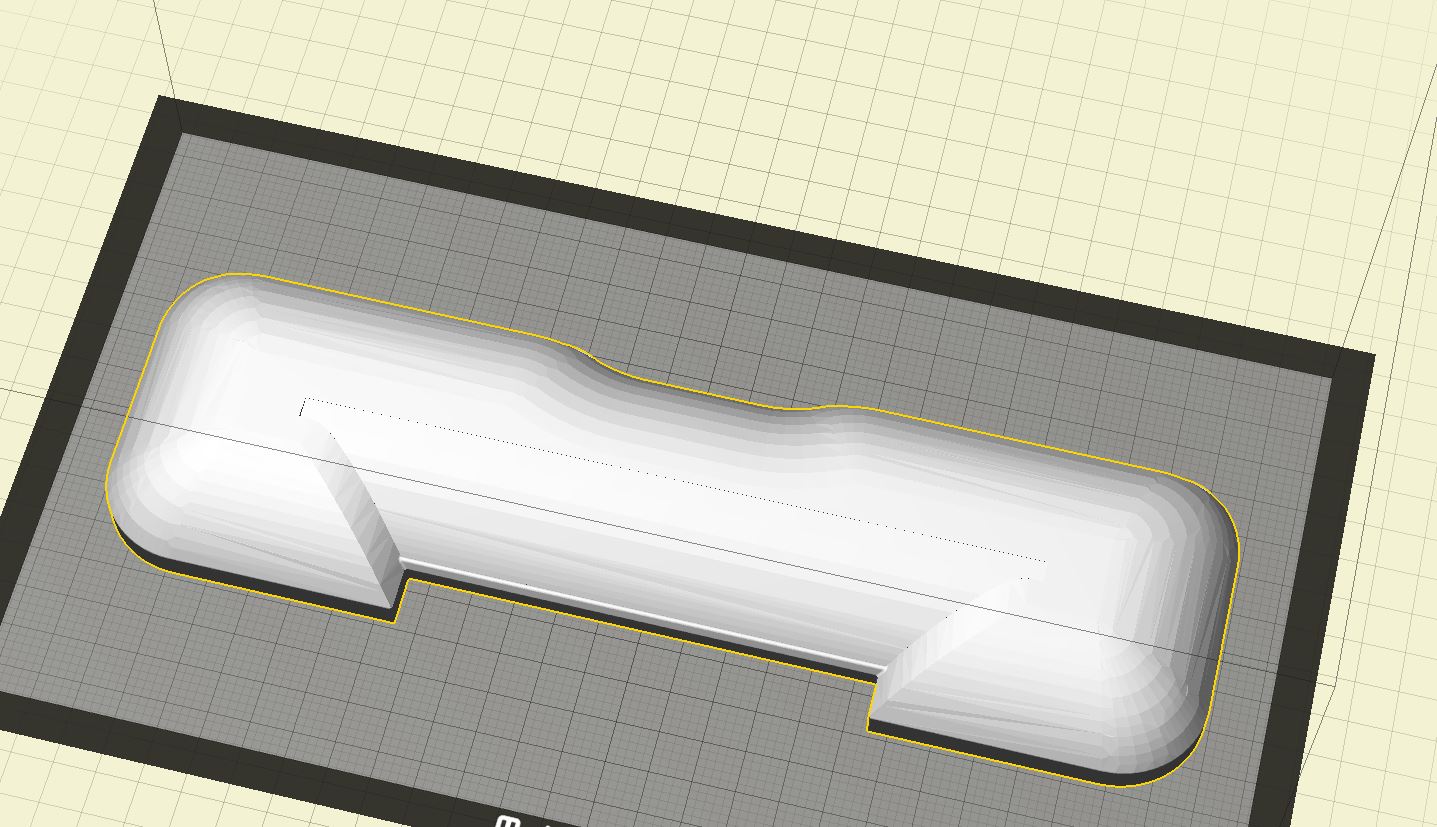
Maya : Paupière pièce 008 – RedOhm
Information pour l’impression :
– Temps de réalisation :14h17mm
– Matière : 152 g
– Type de Matière :ABS ou PLA ou HIPS
– Remplissage : 20%
– Définition : Haute
– Température :configuration sur Z-GLASS pour du PLA pour imprimante Zortrax ou sur Replicator 210°C
– Note pour PLA : Un lit chauffé à 40°C
| Remarque et modification : Dans notre cas , la réalisation a était effectuée en PLA . L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles |
||
| Volume utile sur l’imprimante : 140 cm3 | ||
| Longueur : 257 mm | Largeur : 77mm | Hauteur : 23 mm |

Maya paupiere piece 008 RedOhm ( Reproduit par Davy en PLA de chez Ariane-plas )
| Retour au sommaire |
![]()
Robot Maya globe fermé piéce 009 – RedOhm
Information pour l’impression :
– Temps de réalisation :0h50mm
– Matière : 13 g (0.029ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : L’ensemble des valeurs est donné à titre indicatif , hormis bien évidemment le volume et les dimensions utiles |
||
| Volume utile sur l’imprimante : 7 cm3 | ||
| Longueur : 60 mm | Largeur : 42 mm | Hauteur : 12 mm |
| Retour au sommaire |
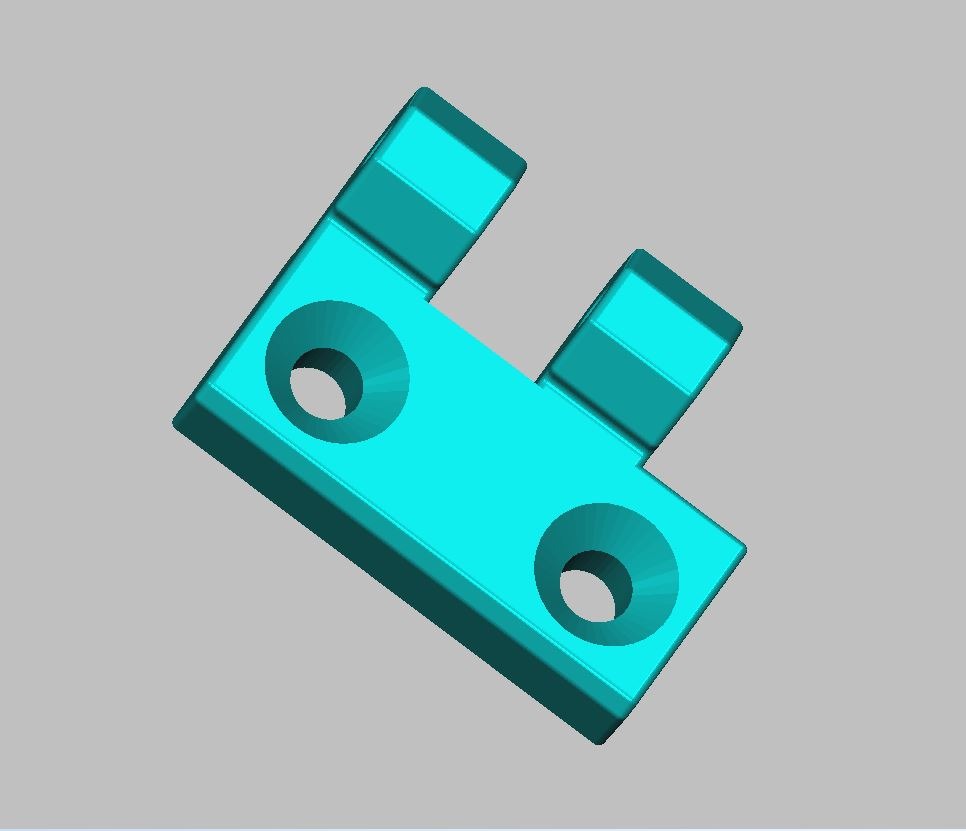
![]()
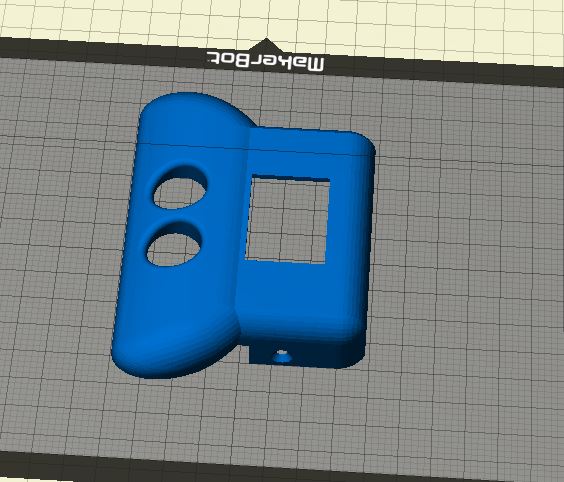
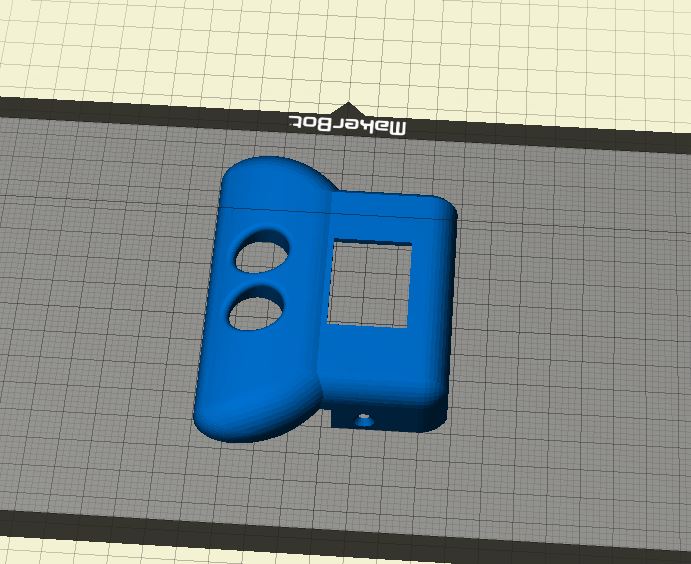
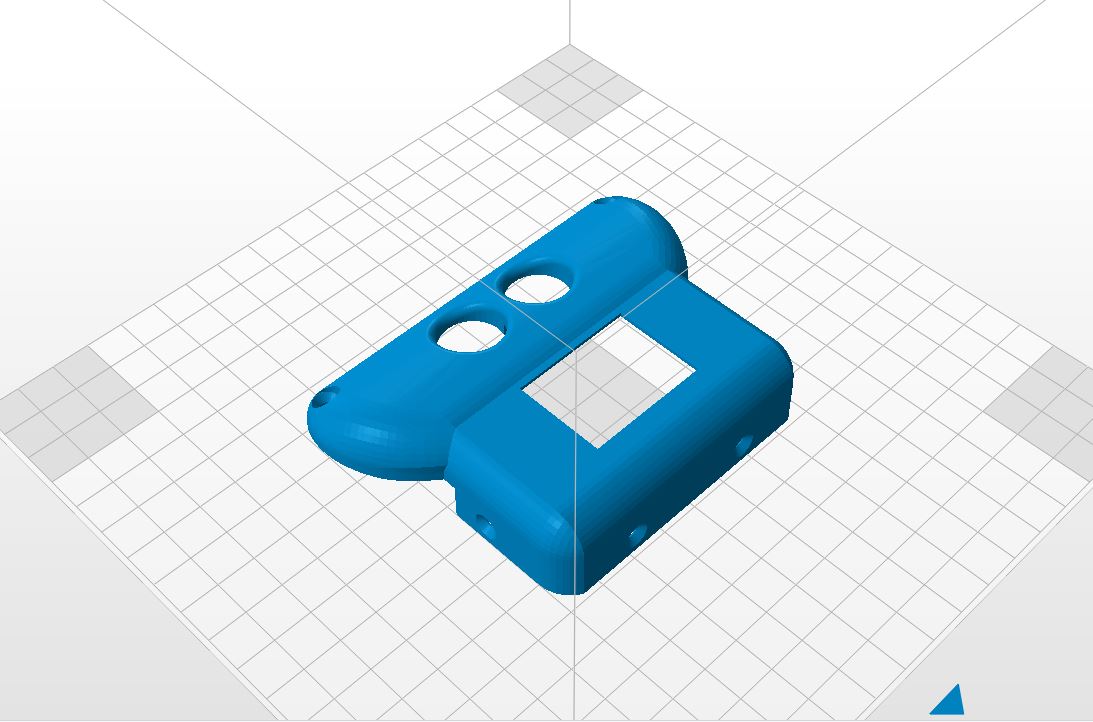
Écrin pour écran pièce 010 Version 5.00 – RedOhm
Information pour l’impression :
– Temps de réalisation :1h09mm
– Matière : 16.21 g (0.036ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
|
Remarque et modification : |
||
| Volume utile sur l’imprimante : 15 cm3 | ||
| Longueur : 60mm | Largeur : 60mm | Hauteur : 35mm |
| Retour au sommaire |
![]()
Robot Maya support yeux piece 011 – RedOhm
Information pour l’impression :
– Temps de réalisation :6h30mm
– Matière : 103.27 g (0.228ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
| Remarque et modification : | ||
| Volume utile sur l’imprimante : | ||
| Longueur en cm | Largeur en cm | Hauteur en cm |
| Retour au sommaire |
![]()
Vue éclatée du cou et de la base du cou de Maya
|
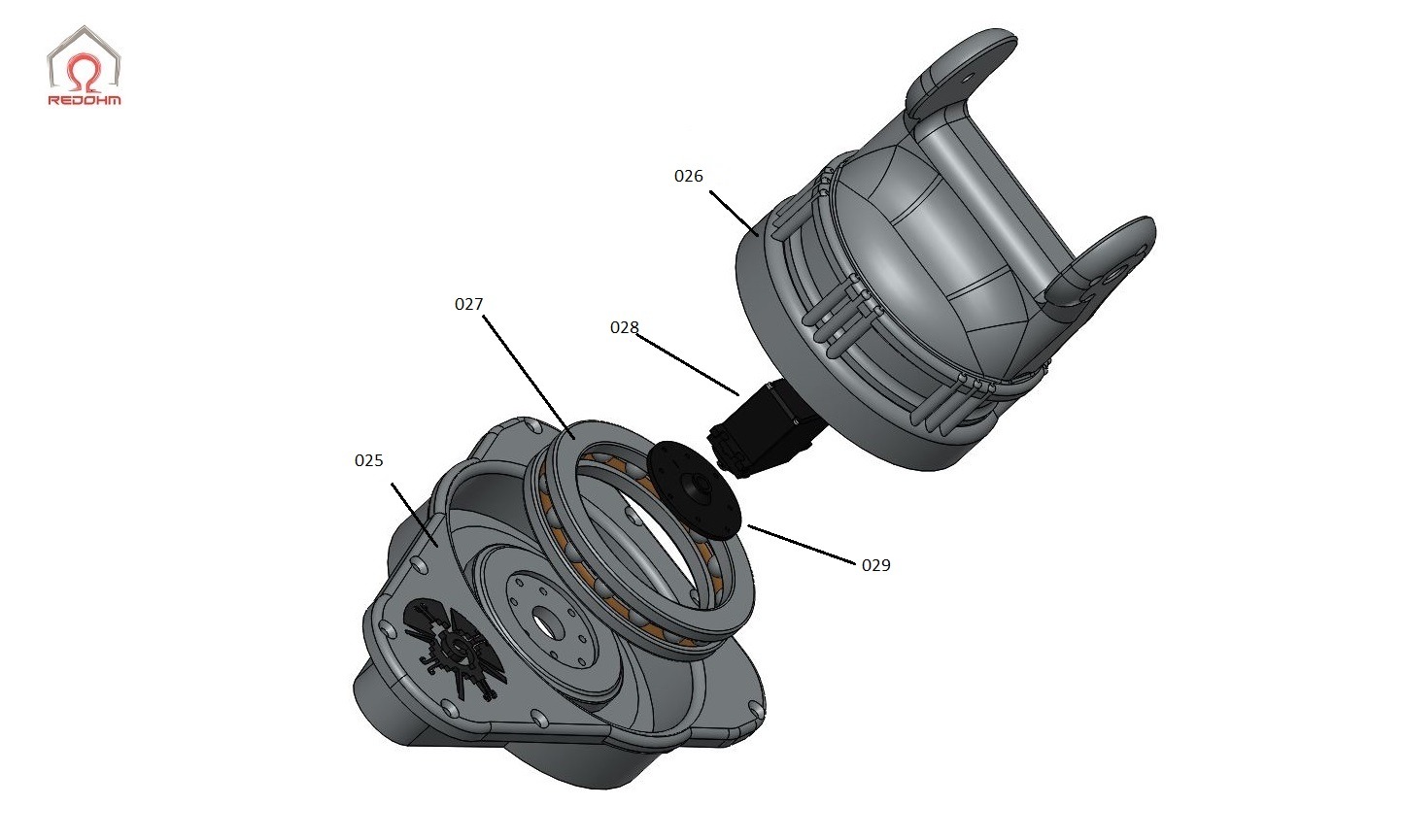
Vue éclatée du cou et de la base du cou de Maya
Information :Le 07-04-2017 : Le numéro des pièces a changé mais celle-ci reste identique à ce jour |
| Retour au sommaire |
![]()
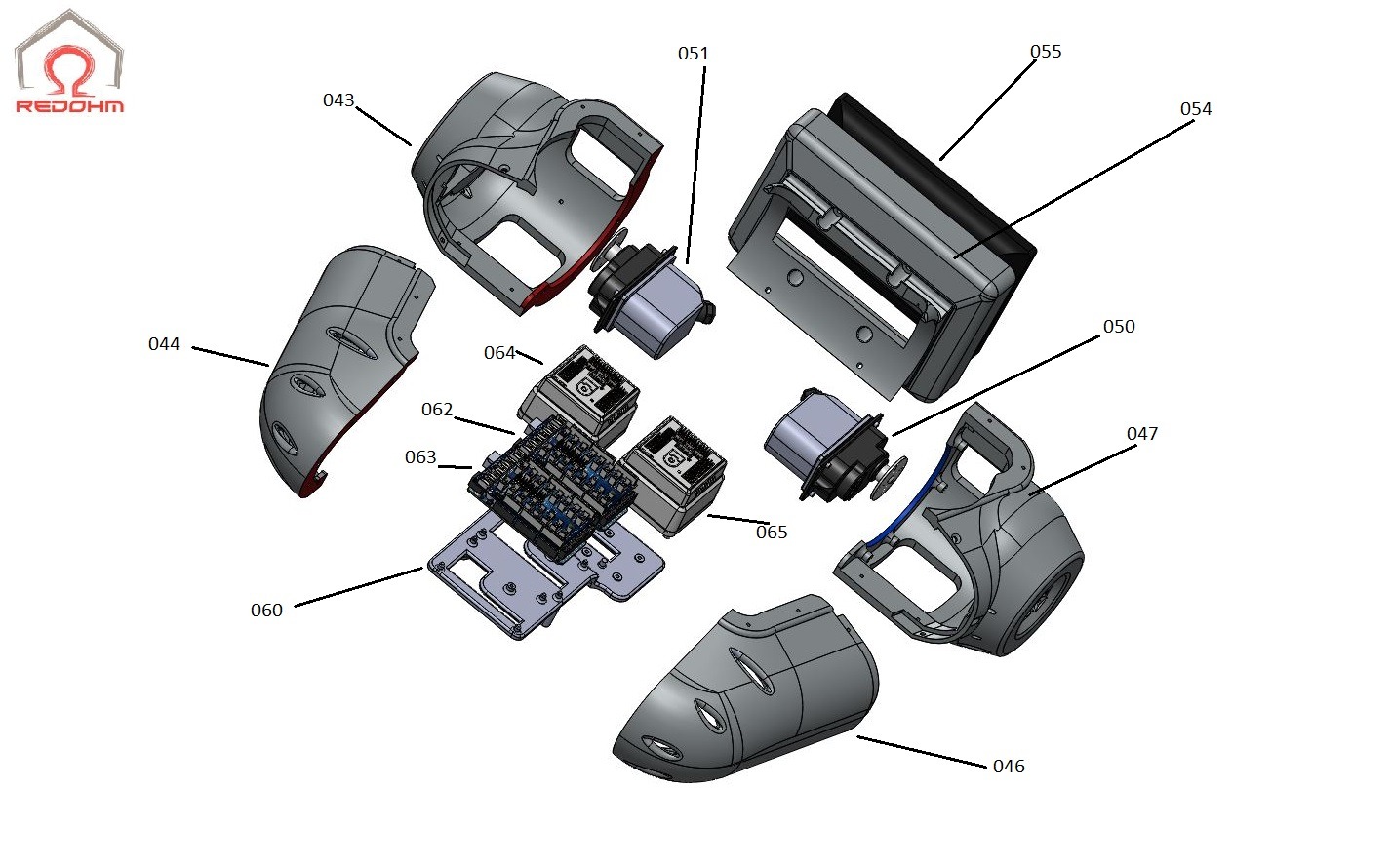
Vue éclatée du thorax et des épaules de Maya
|
Après une série d’essais sur le fonctionnement des épaules Maya, nous nous sommes aperçus qu’il fallait limiter les charges verticales sur l’axe du moteur de l’épaule. Nous avons donc opéré une modification des épaules de Maya, afin d’y insérer une butée à rouleaux pour limiter les contraintes.
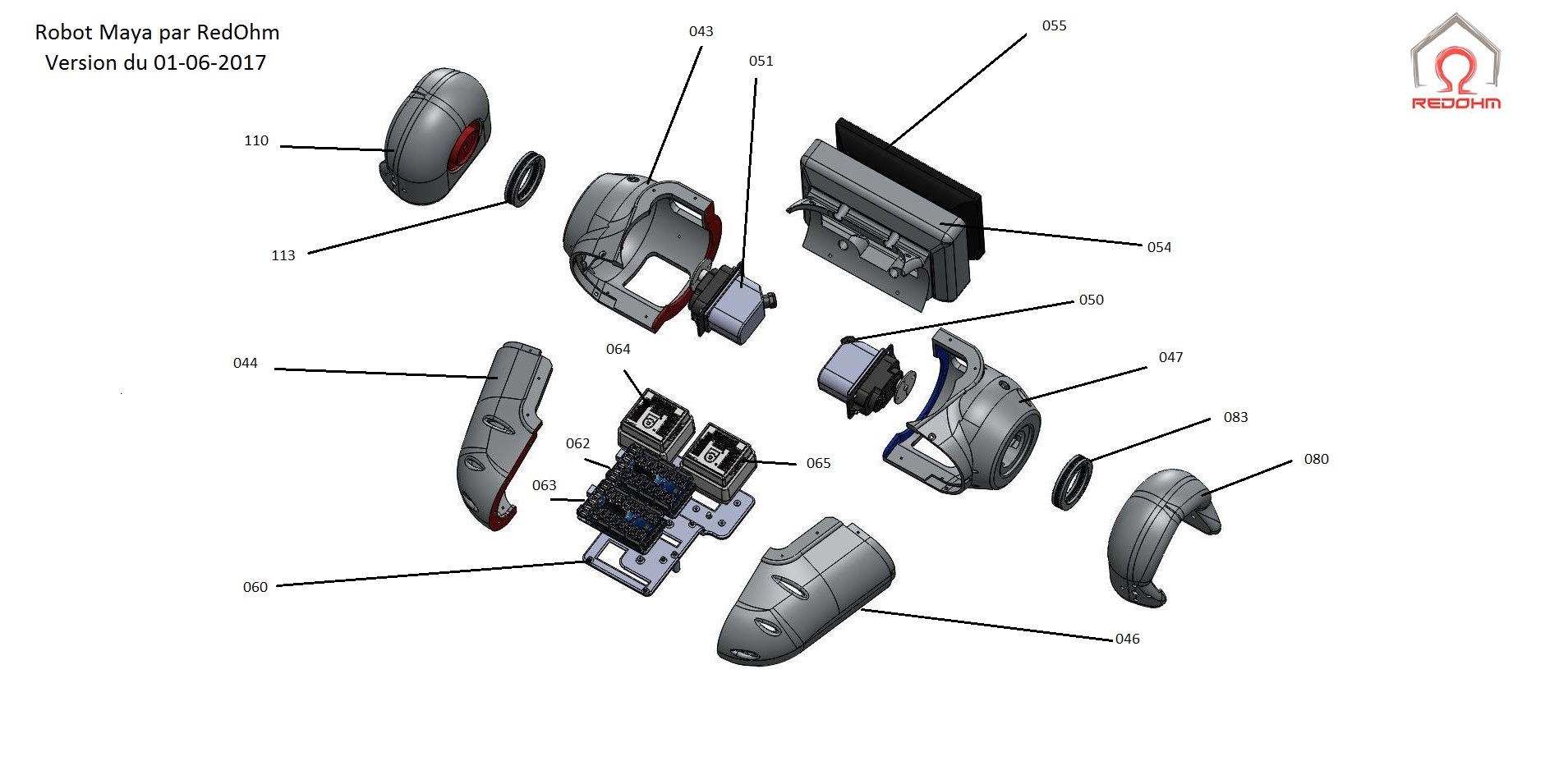
Maya vue éclatée du thorax et des épaules version 01-06-2017 – RedOhm
Nomenclature des pièces :
| Retour au sommaire |
![]()
Ensemble des fichiers à télécharger du thorax |
 Maya version rouge de Davy . Pla de chez Arianeplast Rouge métallisé |
 Maya version rouge de Davy . Pla de chez Arianeplast Rouge métallisé |
 Maya le thorax chez RedOhm . Pla de chez Arianeplast Aluminium métallisé |
| Numéro de pièce | Poids | Temps d’impression | Volume de la pièce | Longueur de la pièce | Largeur de la pièce | Hauteur de la pièce |
| 043 | 212g | 40h20mm | 530 cm3 | 150 mm | 149.9 mm | 150 mm |
| 044 | 139 g | 41h32mm | 342 cm3 | 210.59 mm | 123.38 mm | 126 mm |
| 046 | 139 g | 41h17mm | 340 cm3 | 210.59 mm | 123.38 mm | 126 mm |
| 047 | 211 g | 40h23mm | 534 cm3 | 150 mm | 149.9 mm | 150 mm |
| Remarque et modification : | ||||||
| Profile sur Zortrax : Z-Glass sans utilisation de Z-temp Layer : 0.19 mm |
||||||
| Retour au sommaire |
![]()
| Retour au sommaire |
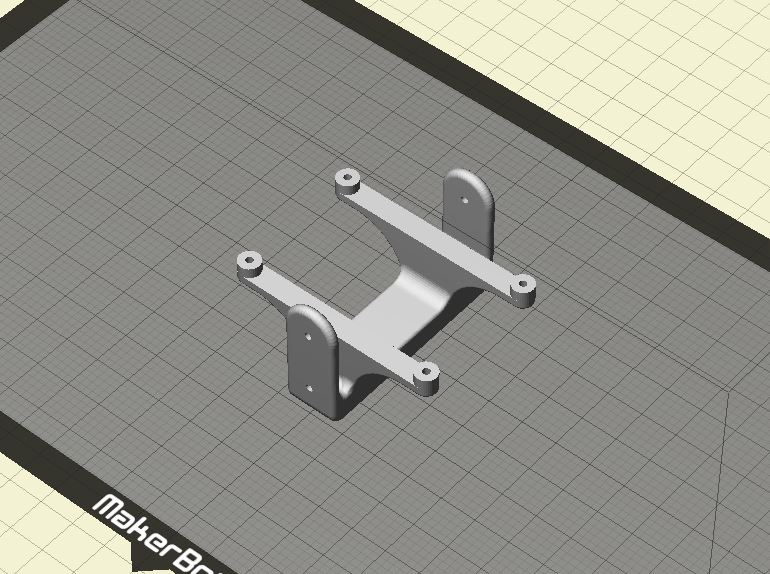
![]()
 Maya support carte thorax – RedOhm 001 . Pla de chez Arianeplast Aluminium métallisé |
 Maya support carte thorax – RedOhm 002 . Pla de chez Arianeplast Aluminium métallisé |
| Remarque et modification : | ||
|
Poids de la pièce en : Pla de chez Arianeplast Aluminium métallisé 112 g |
||
| Longueur en mm | Largeur en mm | Hauteur en mm |
| 158.8 mm | 192.98 mm | 37mm |
| Retour au sommaire |
Archive pour les construction avant le 01/06/2017Vue éclatée du thorax et des épaules de Maya
|
||
|
Nous laissons à disposition les anciens fichiers avant la modification validée du 01/06/2017. Dans ce dossier archives, vous retrouverez l’ancien éclaté ainsi que les fichiers de la même époque pour la réalisation du thorax. |
||
Ensemble des 4 pièces composant le buste 043, 044 , 046 , 047 pour la version avant le 01/06/2017
|
||
| Retour au sommaire |
![]()
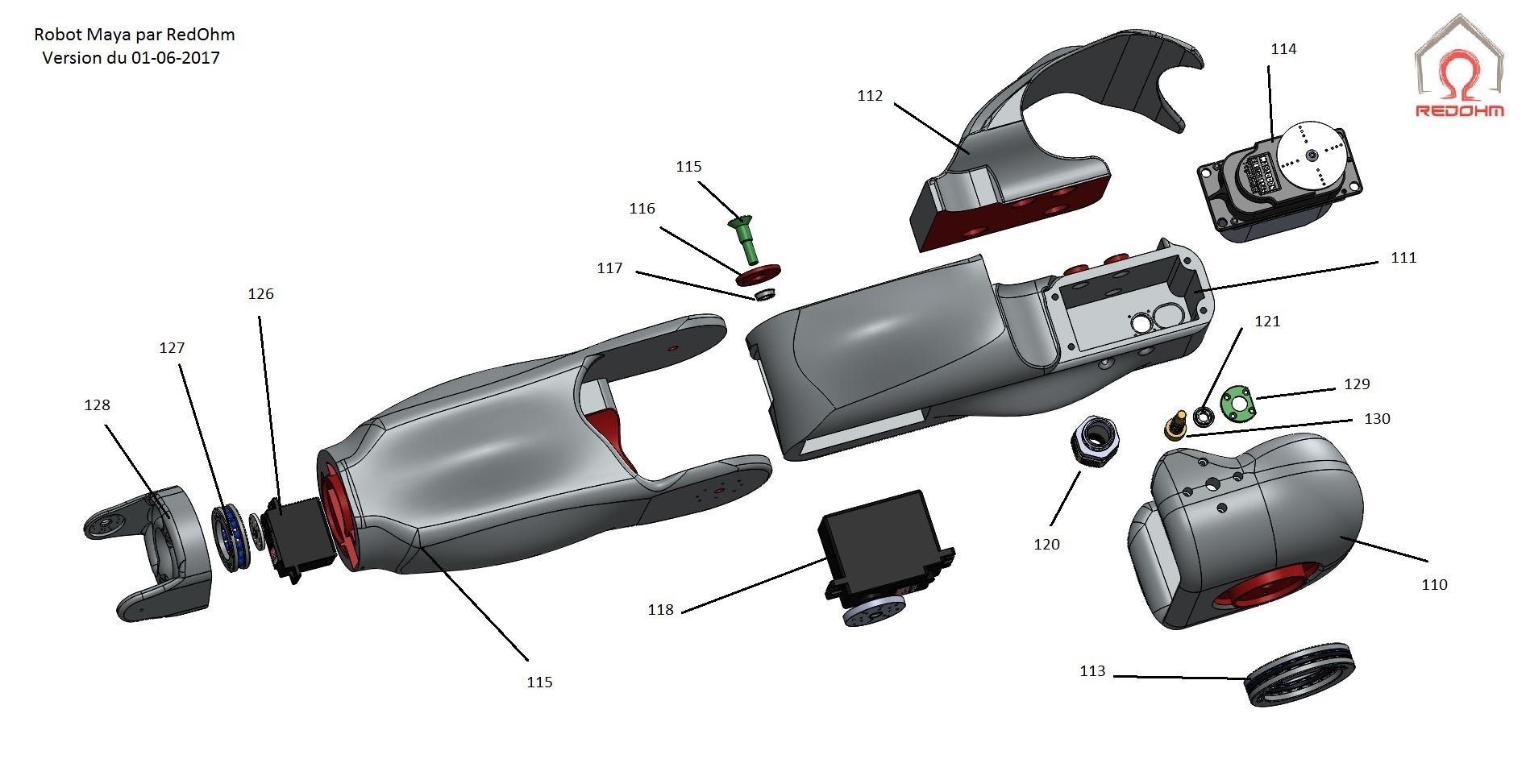
Vue éclatée du bras droit pour le choix des pièces |
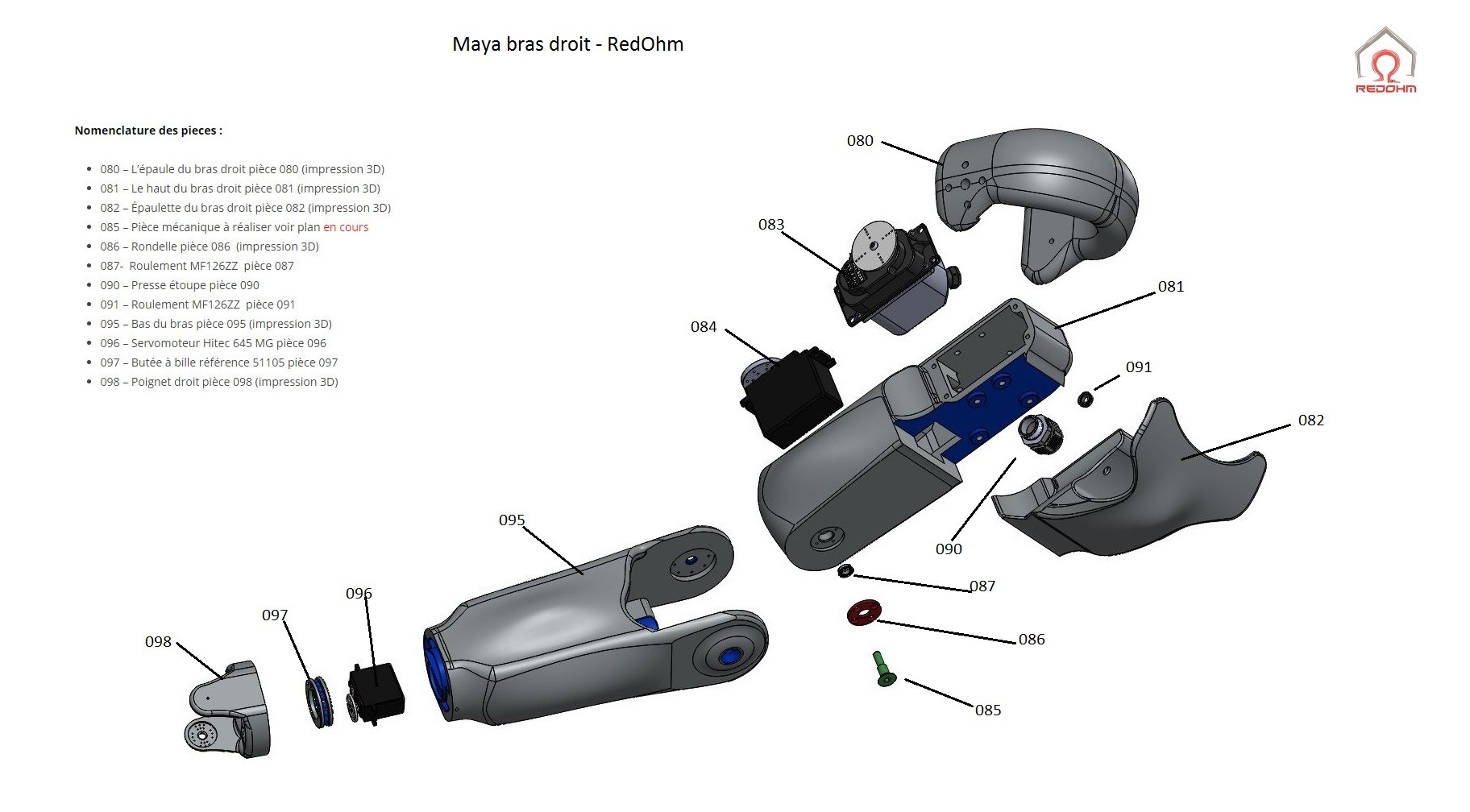
Maya éclaté du bras droit pour le choix des pièces – RedOhm 003
Nomenclature des pieces :
| Retour au sommaire |
![]()
Ensemble des fichiers à télécharger du bras droit |
Robot Maya épaule droite pièce 080 – RedOhm
Information pour l’impression |
||||||
| Numéro de pièce | Poids | Temps d’impression | Volume de la pièce | Longueur de la pièce | Largeur de la pièce | Hauteur de la pièce |
| 080 | 331g | 19h17mm | 725 cm3 | 159 mm | 92 mm | 138 mm |
| 081 | 792g | 65h45mm | 1019 cm3 | 98 mm | 290 mm | 123 mm |
| 082 | 127g | 32h23mm | 425 cm3 | 165 mm | 192 mm | 92 mm |
| 086 | 3g | 0h24mm | 1.54 cm3 | 28 mm | 3 mm | 29 mm |
| 095 | 819g | 71h41mm | 954 cm3 | 123 mm | 277 mm | 106 mm |
| 098 | 60g | 6h | 55 cm3 | 79 mm | 71 mm | 61 mm |
| 099 | 2g | 0h15mm | 0.59 cm3 | 24 mm | 2 mm | 24 mm |
| Type de matière : Pla de chez Arianeplast Aluminium métallisé Qualité paramètre Zortrax : Haute Profile sur Zortrax : Z-Glass sans utilisation de Z-temp ( la matière à un aspect plus foncé ) Profile sur Zortrax : Z-Glass avec utilisation de Z-temp avec un offset de -20 ° ( la matière à un aspect plus brillant ) |
||||||
| Retour au sommaire |
Vue éclatée du bras gauche pour le choix des pièces
|
Maya vue du bras gauche éclatée Version du 01-06-2017 RedOhm
| Retour au sommaire |
![]()
 Avant bras type Terminator Version 2.00
Avant bras type Terminator Version 2.00
Mise à jour le 10/07/2019 : Retrouvez sur cette page l’ensemble des articles concernant le projet type Terminator ( album photos , plan mécanique , fichier à télécharger pour l’impression 3D etc. ).
Mise à jour le 19/06/2018
Définition alliage à mémoire de forme |
Un alliage à mémoire de forme (AMF) est un alliage possédant plusieurs propriétés inédites parmi les matériaux métalliques : la capacité de garder en mémoire une forme initiale et d’y retourner même après une déformation, la possibilité d’alterner entre deux formes préalablement mémorisées lorsque sa température varie autour d’une température critique, et un comportement superélastique permettant des allongements sans déformation permanente supérieurs à ceux des autres métaux. Parmi les principaux alliages à mémoire de forme, on retrouve toute une variété d’alliages de nickel et de titane comme constituants principaux, en proportions presque égales. Bien que « nitinol » ne soit en fait que le nom de l’un de ces « alliages quasi-équiatomiques nickel-titane », cette appellation est devenue couramment utilisée dans la littérature pour désigner l’ensemble de ces alliages, qui ont des propriétés fort semblables. Afin d’alléger le texte, il en sera fait ici le même usage. Dans une moindre mesure, le laiton et certains alliages cuivre-aluminium possèdent également des propriétés de mémoire de forme.
Présentation du fil Flexinol |
A température ambiante, un fil FLEXINOL peut être étiré facilement sans grand effort. Cependant, le fait de le porter à une température supérieure à sa température de transition modifie sa structure ce qui a pour effet de le faire revenir de lui-même à sa taille initiale en fournissant une force considérable.
– Taux de rétreint en longueur : 3 à 5 % (indépendant du diamètre du fil)
– Nombre de manœuvres : >1million de cycle (si utilisés conformément aux instructions).
– Temps de rétreint très court : aussi vite qu’il chauffe !
– Temps de relaxation (retour à la longueur initiale) : dépend de la T° ambiante.
– Assistance possible par un moyen externe (ressort , etc.).
Plus la T° est élevée, plus il faut de puissance pour le chauffer mais plus le temps de relaxation sera court.
– fil “70 °C” : 9 à 40.
– fil “90 °C” : 13 à 65.
| Référence | Température en degrés | Force en gr | Temps de réaction en seconde | Courant de contraction / s | Résistance en Ohms/m | Diamètre en mm |
| 5765 | 90 | 36 | 0.3 | 85mA | 500 | 0.05 |
| 5722 | 70 | 321 | 2 | 415mA | 55 | 0.15 |
Utilisation du produit |
Dans les montages ou nous utilisons le fil Flexinol, un contrôle du courant est essentiel pour obtenir des résultats satisfaisants. S’il y a trop de courant, le fil ne parviendra pas à se contracter à l’inverse un excès de courant et le fil surchauffera, et dans ce cas il peut perdre ses propriétés de mémoire de forme. On s’aperçoit que les variations de courant auront une incidence sur le temps de chauffage et de refroidissement. Il est important avant de faire quoique ce soit, au niveau du montage, de bien intégrer les paramètres électriques du fil utilisé, voir le tableau ci-dessous.
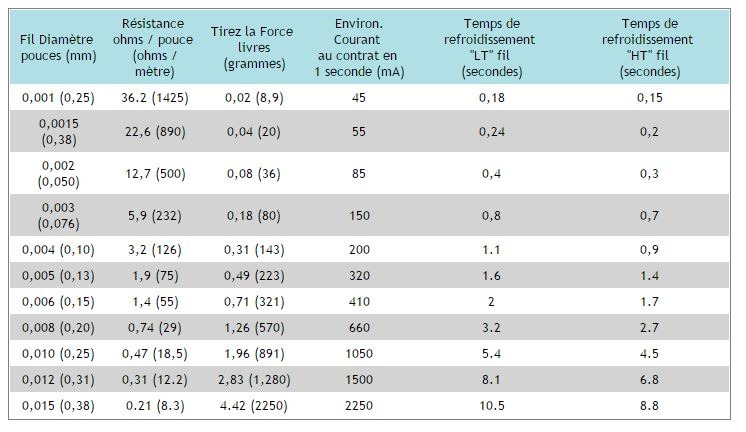
Flexinol tableau de paramètres
Quelques vidéos |
le saviez-vous ,flexinol a été utilisé pour faire fonctionner un capteur de poussière installé sur le Rover Sojourner qui a atterri sur Mars dans le cadre de la mission mars Pathfinder le 4 juillet 1997.

Référence technique : robotics.hobbizine.com/
Information sur les alliage à mémoire de forme : Wikipédia
Information produit :
Nos fournisseurs :
![]()
 Etude du robot Maya pas à pas
Etude du robot Maya pas à pas
RedOhm Maya le 26/11/2016
Mise à jour le 29/01/2016
| Retour au menu principal |
Expression des yeux de Maya |
La question est la suivante comment donner une expression à un robot .Nous avons donc pensé que les yeux étaient un bon départ pour déterminer des expressions humaines transposées à la machine .Ces expressions seront de plusieurs natures , un regard attentif , penaud , en colère etc et même quelques expressions comme un clin d’œil .Nous avons donc développé rapidement quelques expressions , puis nous avons mis côte à côte 2 écrans pour imaginer le reste de la tête de Maya
Construction de l’oeil de Maya
| Retour au sommaire |
![]()
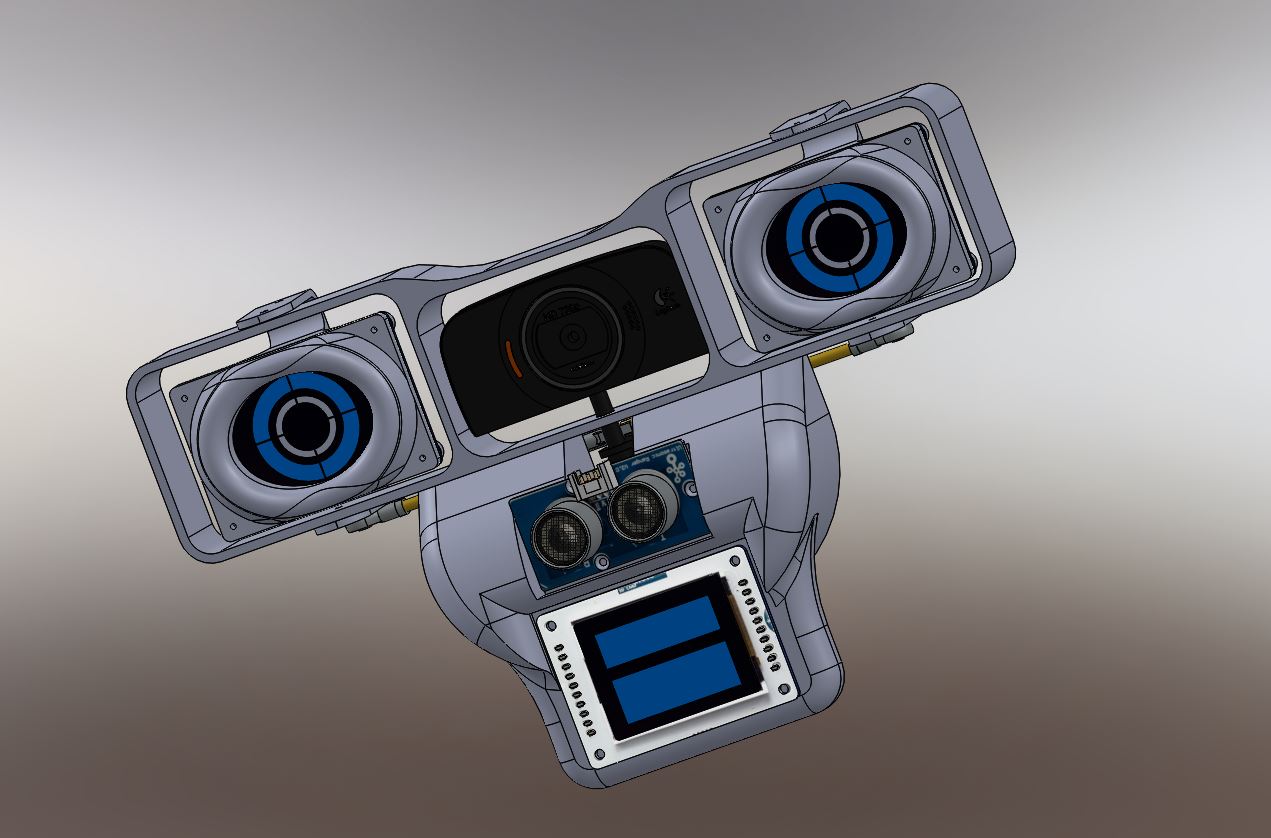
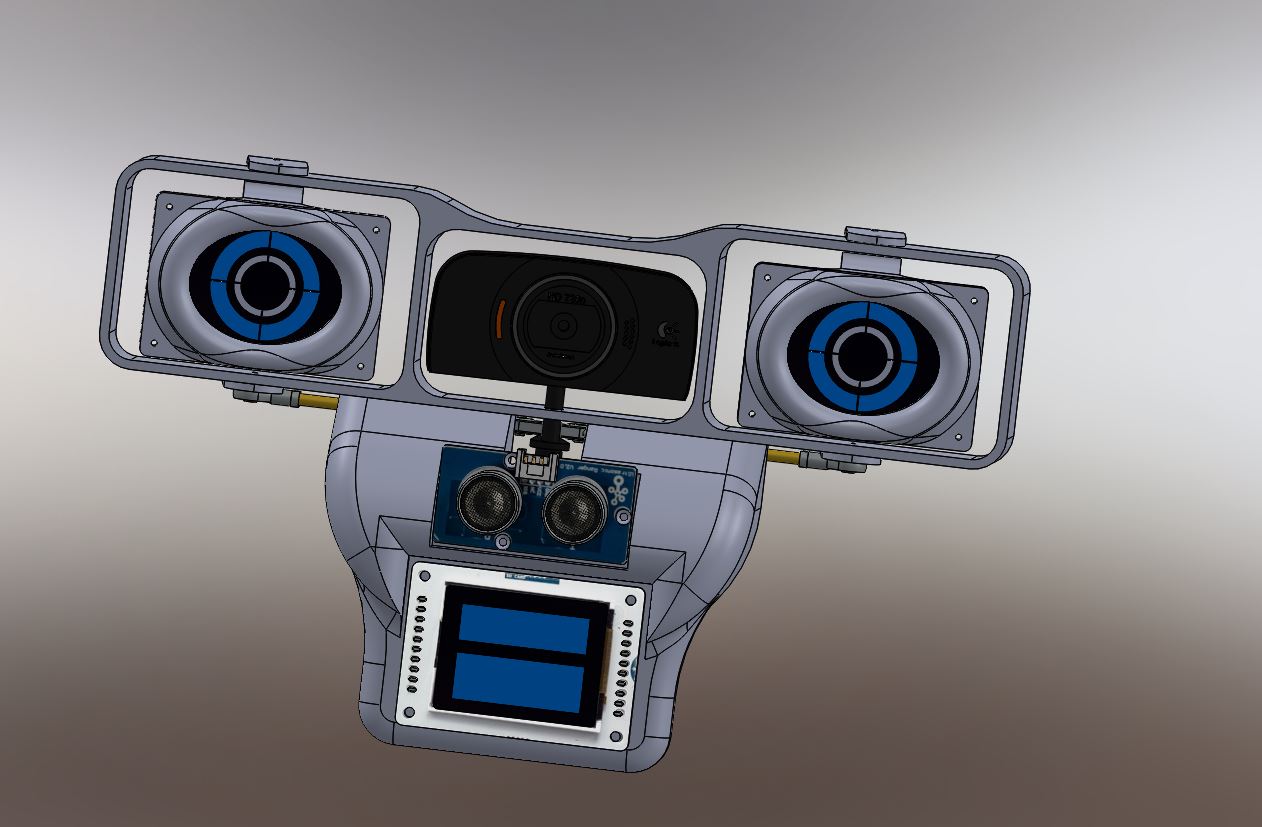
10-10-2016 Assemblage des yeux et de la bouche de Maya |
| Retour au sommaire |
22-10-2016 avancement de la tète de Maya . |
22-10-2016 avancement de la tète de Maya .
La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs.
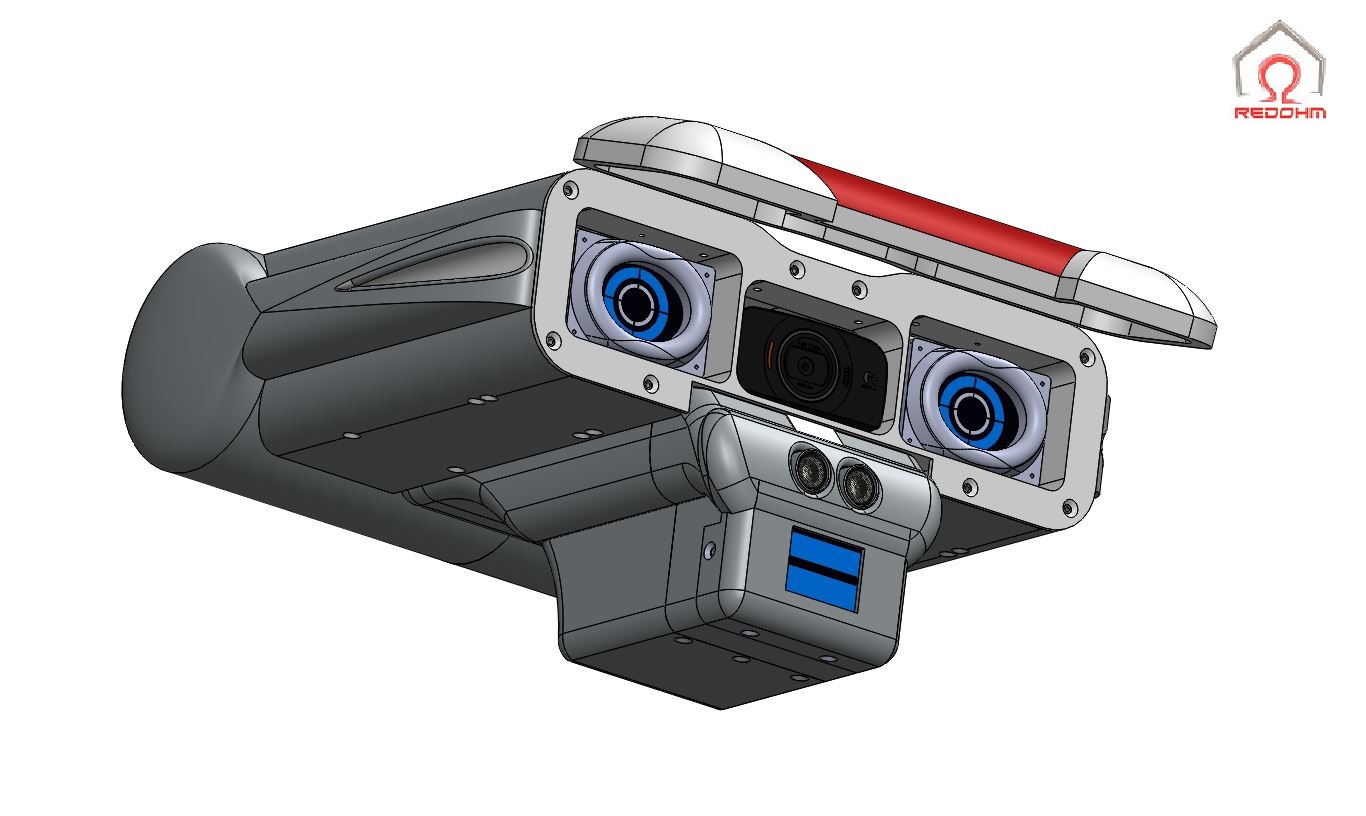
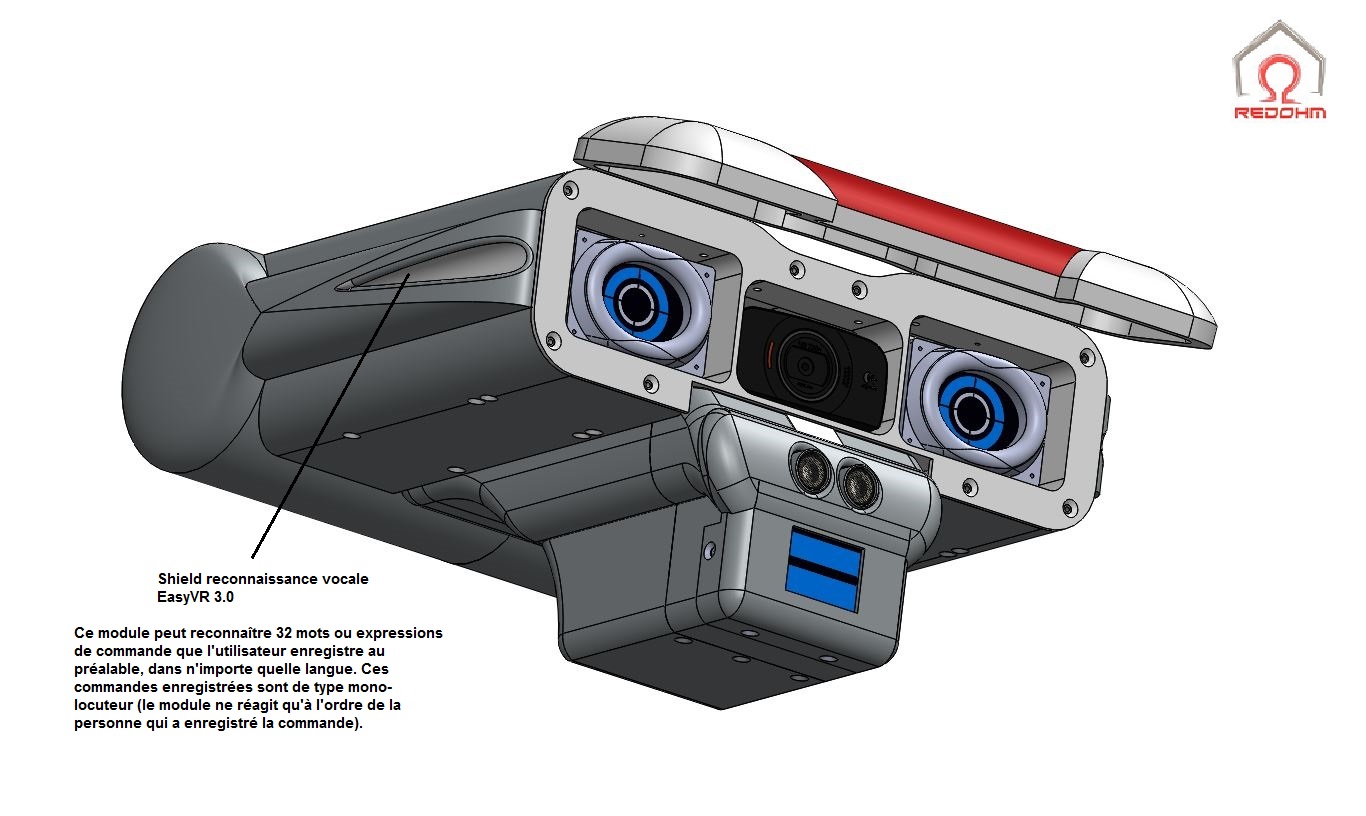
Ce module peut reconnaître 32 mots ou expressions de commande que l’utilisateur enregistre au préalable, dans n’importe quelle langue. Ces commandes enregistrées sont de type mono-locuteur (le module ne réagit qu’à l’ordre de la personne qui a enregistré la commande).
Le shield EasyVR dispose également de 26 commandes pré-enregistrées pour chaque langage supporté. Ces expressions sont reconnues quelle que soit la personne qui les prononce. Ces expressions sont: robot, action, bouge, tourne, cours, regarde, attaque, arrête, salut, à gauche, à droite, vers le haut, vers le bas, en avant, en arrière, zéro, un, deux, trois, quatre, cinq, six, sept, huit, neuf, dix)
Le module peut être utilisé avec des cartes équipées d’une interface UART alimentée en 3,3 – 5 Vcc. Le logiciel est téléchargeable gratuitement et le module est livré avec un micro séparé.
Diaporama de la journée du 23/10/2016
| Retour au sommaire |
22-10-2016 Une petite vidéo pour découvrir l’ensemble des pièces qui composent la tête |
| Retour au sommaire |
26/10/2016 – Impression 3d des premières pièces du robot Maya |
| Retour au sommaire |
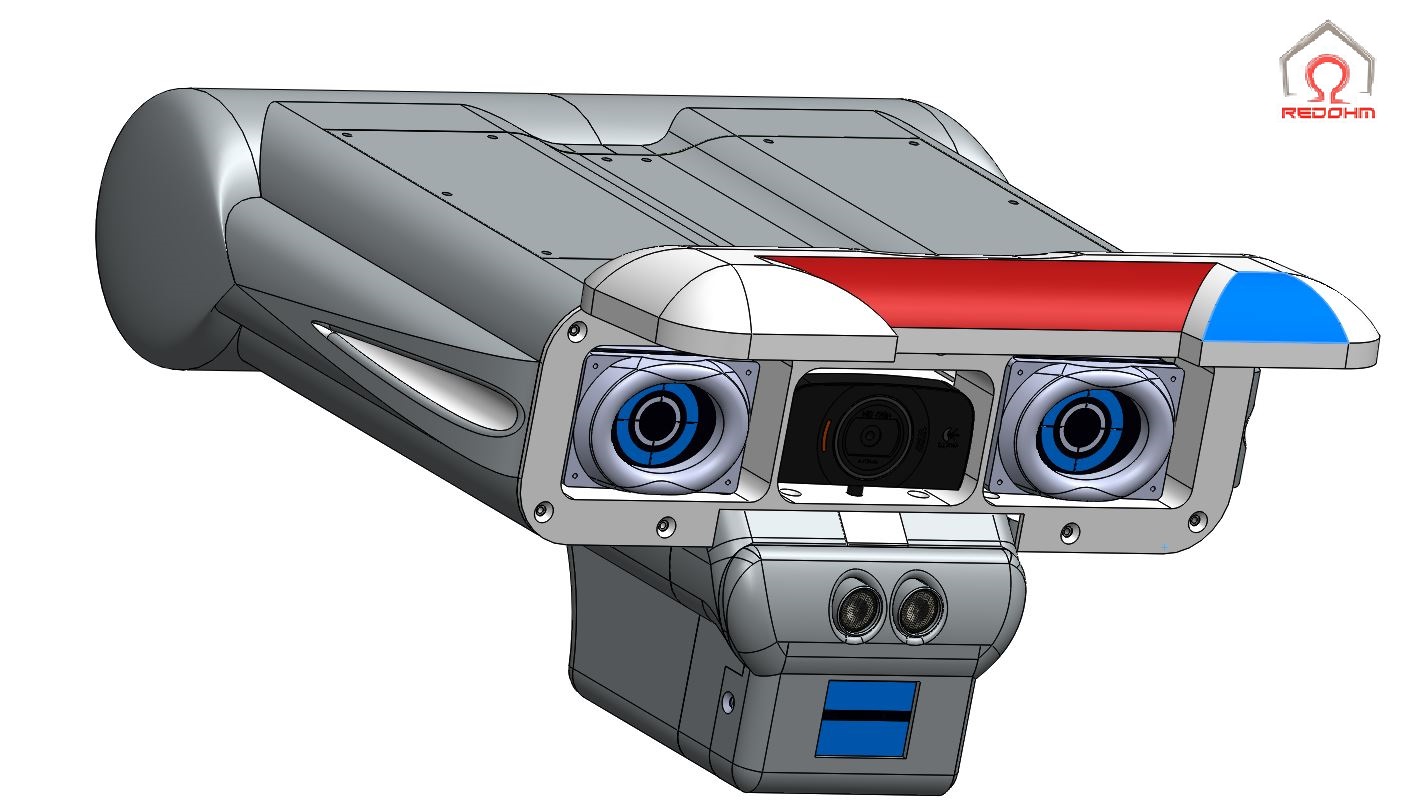
27/10/2016 Montage de la partie inférieure du visage |
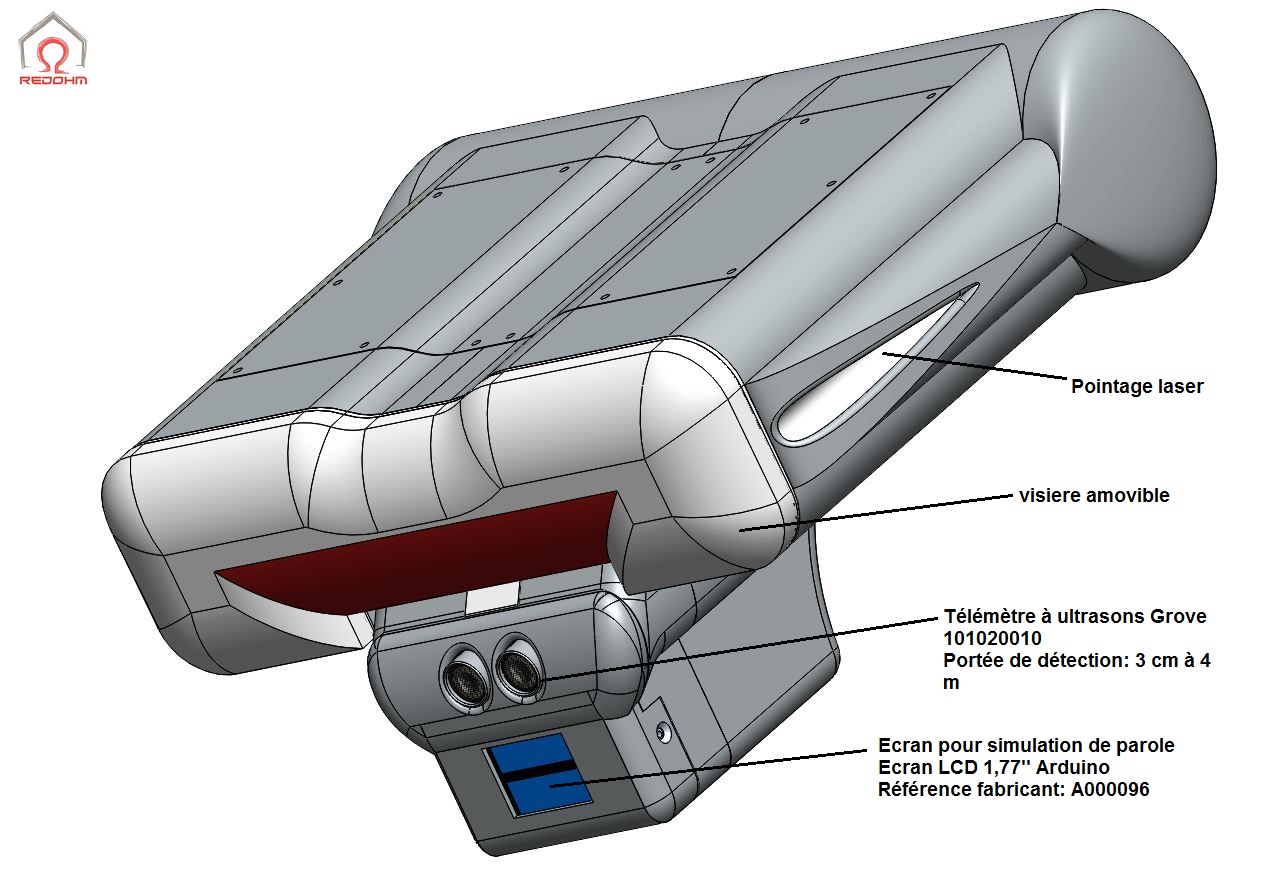
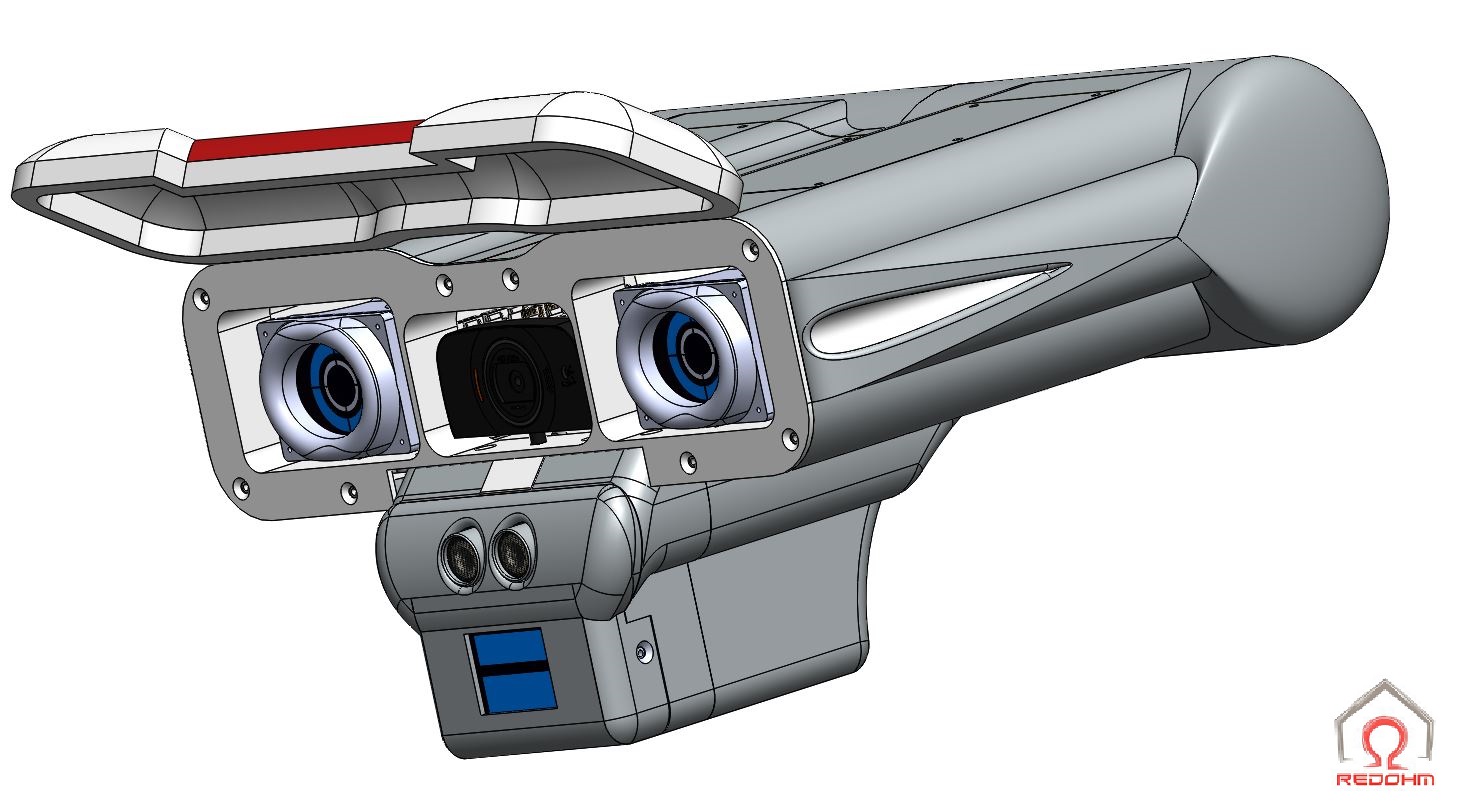
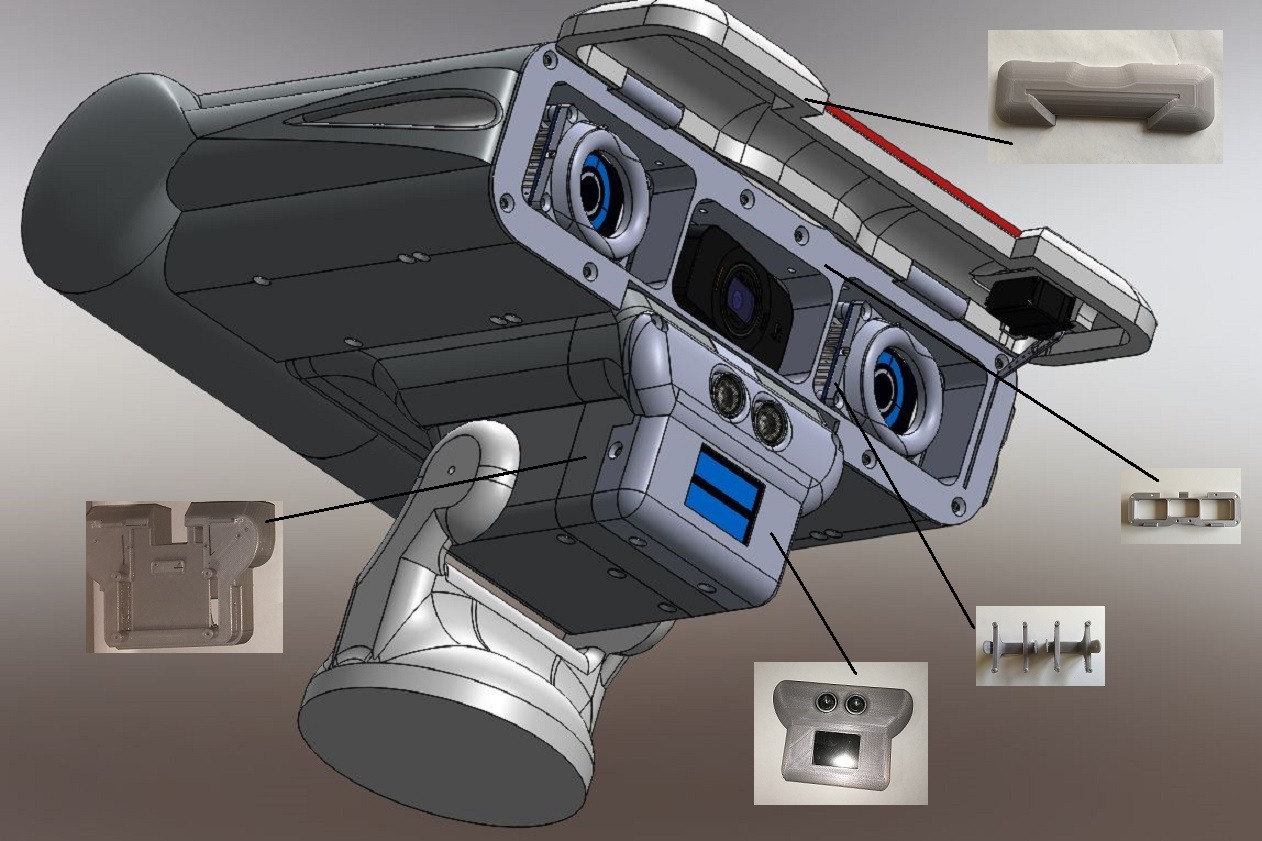
Les essais de montage sur le robot Maya continuent .Nous avons essayé le montage de l’écran qui fait office de bouche et le montage du capteur ultrasonique.
Ecran couleur LCD TFT 1,77″ Arduino spécialement prévu pour être raccordé sur la carte Arduino Esplora via 2 rangées de connecteurs. Cet afficheur peut également fonctionner avec les cartes UNO, Leonardo, Due, etc.
Le module est équipé d’un port micro-SD, ce qui permet notamment de stocker et afficher des images bitmap et il communique avec la carte Arduino via le port SPI. La librairie contenue dans la version Arduino 1.5.8 beta est nécessaire au bon fonctionnement de cet afficheur.
Alimentation: 5 Vcc
Ecran: 1,77″
Couleurs: 262000
Résolution: 160 x 128 pixels
Port: SPI
Support carte: micro-SD
Température de service: -20 à +70°C
Dimensions: 60 x 42 x 15 mm
Référence fabricant: A000096
Utilisation pratique de l’afficheur : RedOhm le regarde attentif
Prix moyen entre : 22 à 30€
Fournisseur : generationrobots
Ce télémètre compatible Grove permet de mesurer la distance sans contact à l’aide de transducteurs à ultrasons.Il se raccorde sur une entrée analogique du Grove Base Shield ou du Mega Shield via un câble 4 conducteurs .
Interface: compatible Grove
Alimentation: 5 Vcc
Consommation: 15 mA
Fréquence: 40 kHz
Sortie digitale:
– état HAUT: ligne noire détectée
– état BAS: couleur blanche détectée
Led: rouge si détection d’une ligne noire
Portée de détection: 3 cm à 4 m
Résolution: 1 cm
Dimensions: 43 x 25 x 15 mm
Référence Seeedstudio: 101020010 (remplace SEN10737P)
Prix moyen entre : 13 à 16€
Fournisseur : gotronic.fr
| Retour au sommaire |
29/10/2016 Modifications du robot Maya avec la pose du cou |
| Retour au sommaire |
![]()
02/11/2016 Impression des pièces Version 2.00 |
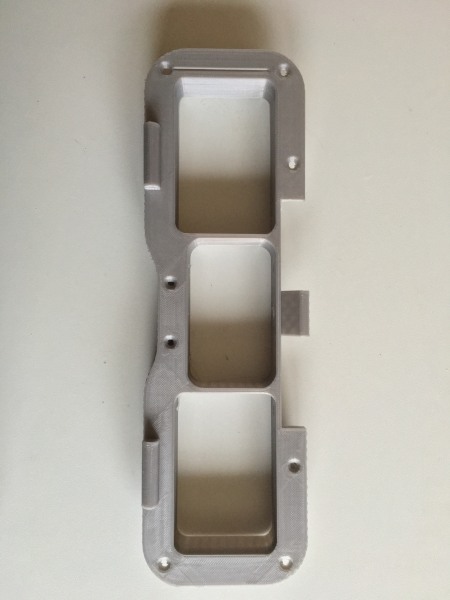
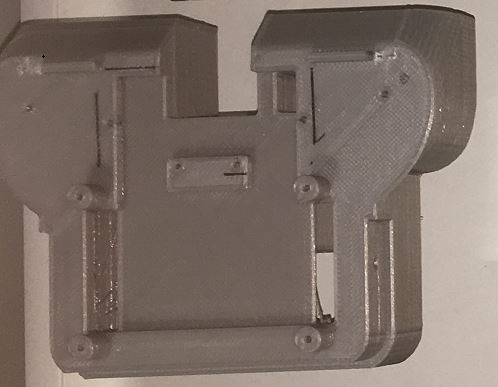
Nous avons sorti l’ensemble des pièces principales du système de vision ainsi que la partie de la mâchoire inférieure et le carter. L’ensemble de ces pièces ont déjà subi quelques modifications. Nous sommes déjà à la version 2.00
***
Visualisation des pièces ci-dessus
| Retour au sommaire |
![]()
17/11/2016 Vidéo de l’ensemble tête , thorax, épaule |
Présentation de l’ensemble tête , thorax , épaule de notre robot Maya . Cette vidéo à pour but de vous donner un aperçu du rendu de l’ensemble ainsi qu’une vision des mouvements de la tête .
| Retour au sommaire |
![]()
20/11/2016 Premiers essais du robot Maya |
La carte EZ-B V4 permet de contrôler et commander un robot ou autre application de votre choix pilotée par PC via une liaison Wifi. Il suffit d’utiliser une plateforme de base ou de construire vous-même un robot de base et d’ajouter la carte EZ-B.
L’utilisation du logiciel EZ-Builder sur votre ordinateur vous permet de contrôler les sorties de la carte de commande EZ-B. Ajoutez des capteurs, caméras, leds, servomoteurs, afficheurs digitaux, contrôleurs de moteurs, etc pour réaliser le projet.
Le logiciel graphique EZ-Builder est prévu pour ceux qui ne souhaitent pas programmer. Il suffit de connecter les capteurs, servomoteurs, leds, afficheurs LCD et bouton à la carte EZ-B et d’utiliser le logiciel graphique pour commander le robot à partir de votre PC.
| Retour au sommaire |
![]()
26/11/2016 Etude du montage des épaule sur le thorax |
Le servomoteur digital Mastodon 9944 est idéal pour les gros modèles de modèle réduit . Son boîtier en aluminium parfaitement étanche, usiné dans la masse, ses pignons en métal et son axe de sortie à roulement à billes vous offrent de belles performances.
Caractéristiques :
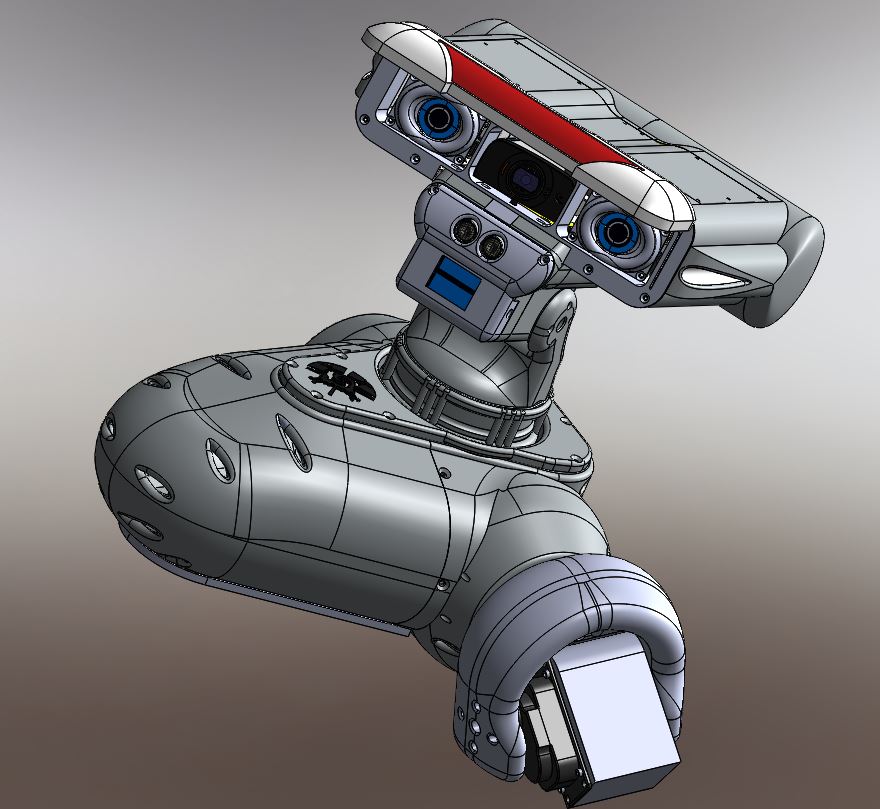
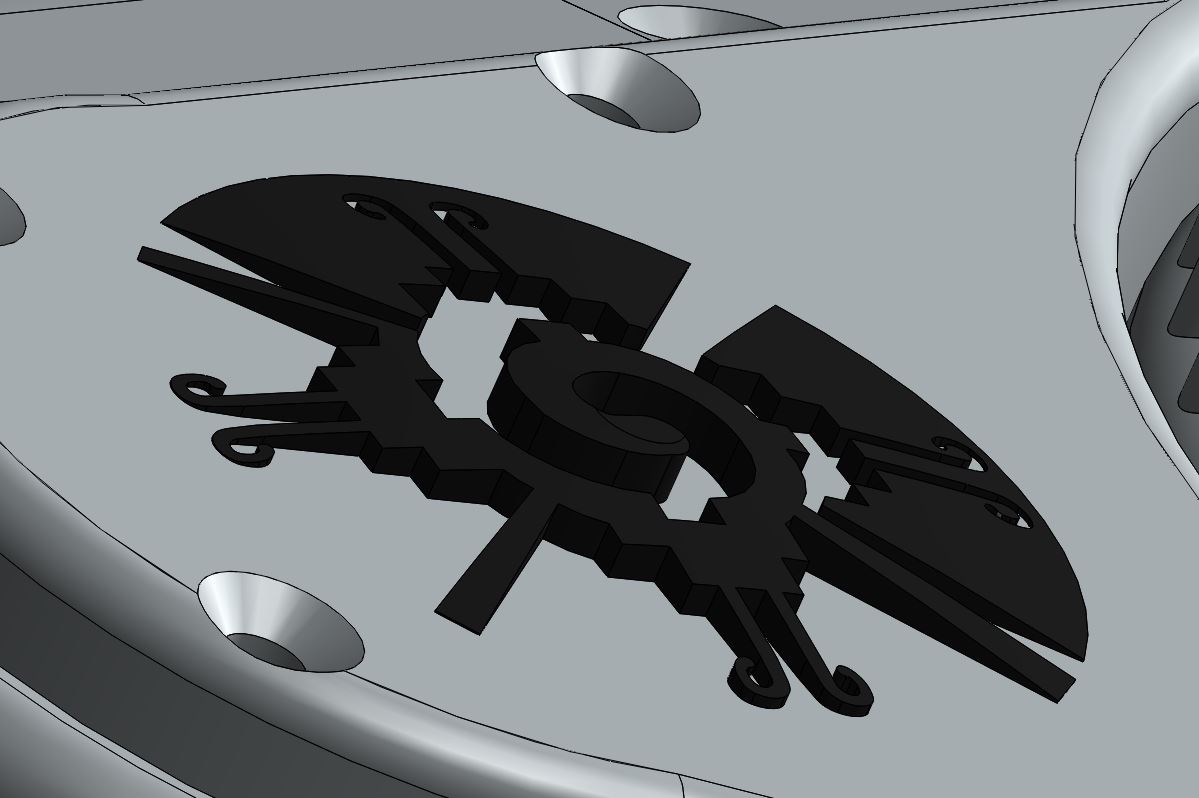
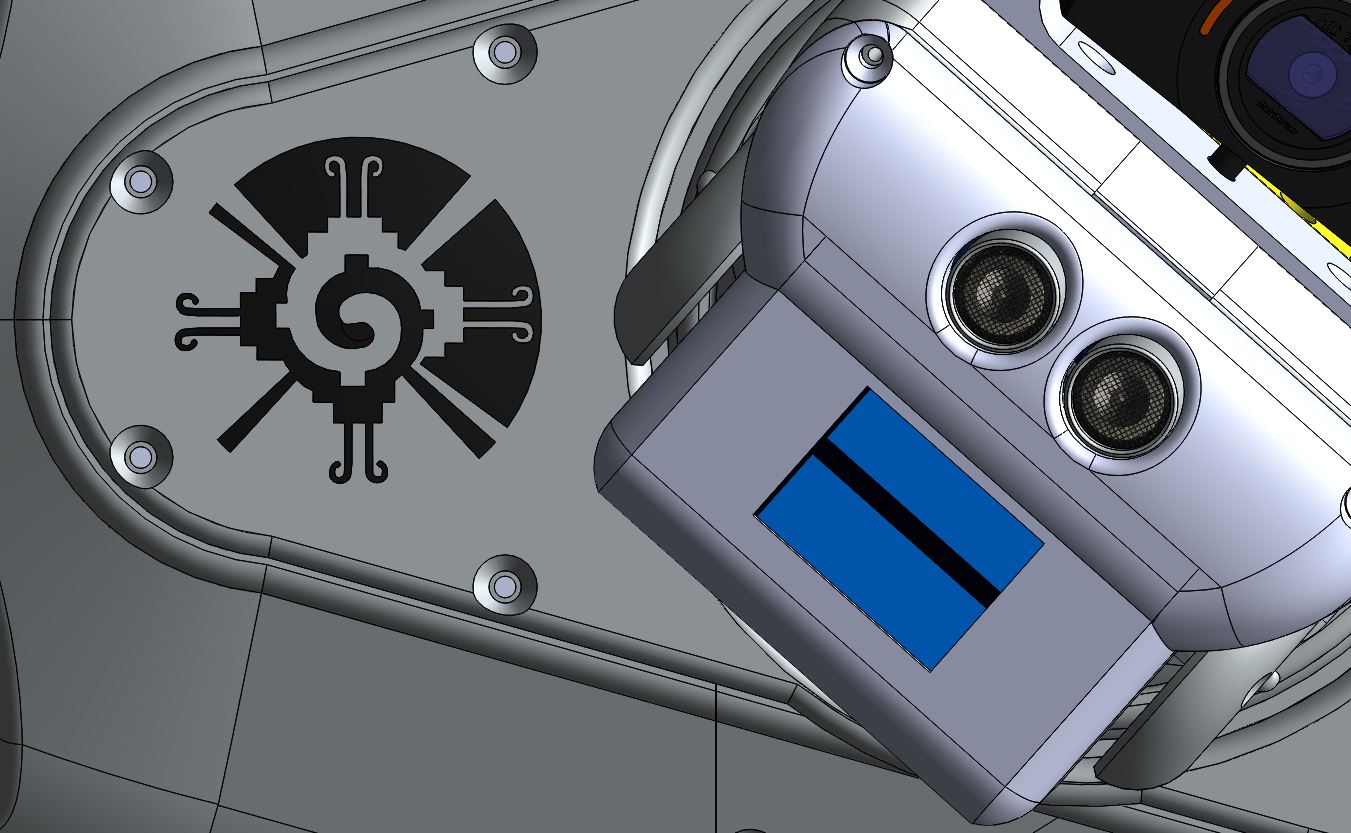
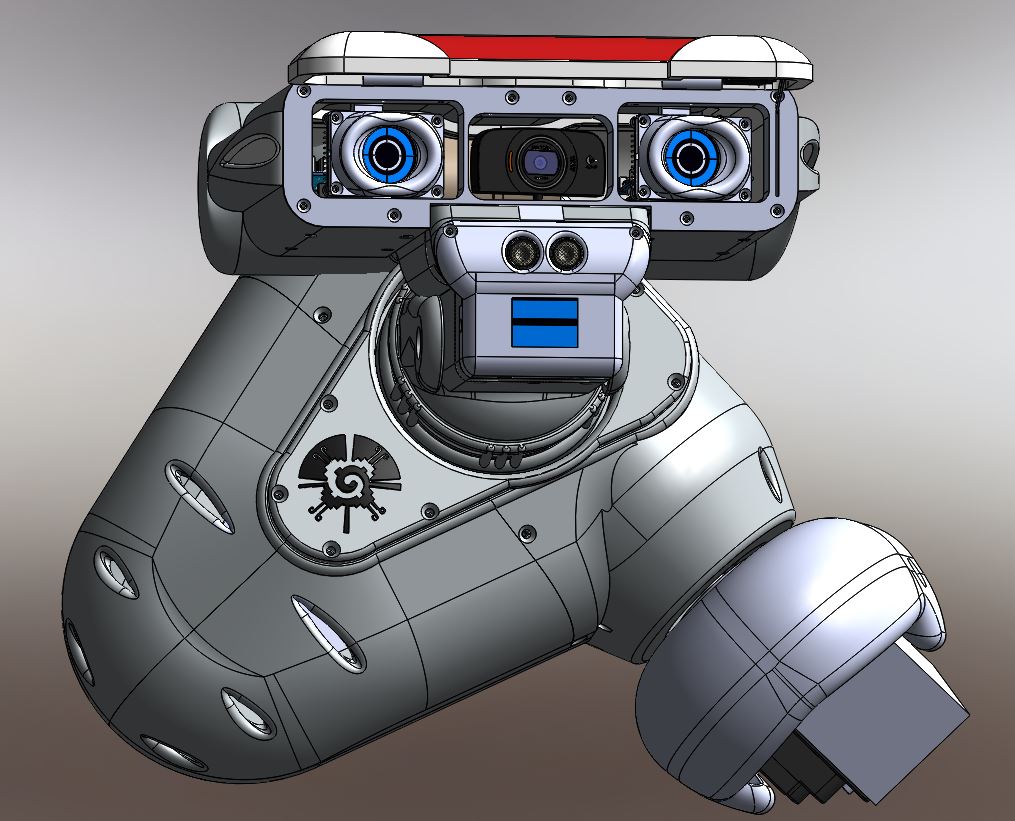
Nous avons aussi ajouté des symboles Maya sur la carcasse du robot comme décoration, par exemple sur le support porte coup le papillon galactique .
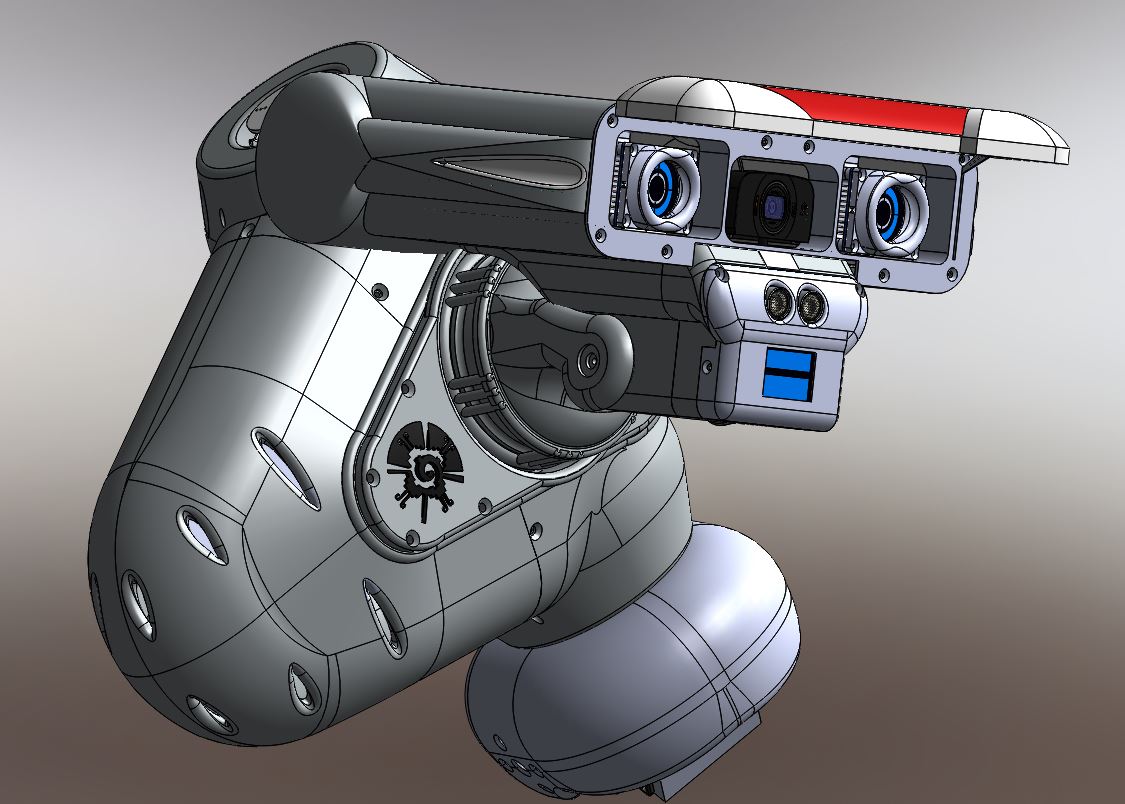
RedOhm le robot Maya : sur la base du porte cou le symbole du papillon galactique
Ce symbole est appelé Hunab Ku ou Papillon Galactique dans la mythologie Maya ; il est dit qu’il représente toute la Conscience ayant jamais existé dans cette galaxie. Il englobe la totalité de nos ancêtres sur le plan physique, les humains, les animaux, les reptiles, les poissons, les crustacés et également les plantes en tant que conscience qui organise toute matière à l’état brut à partir d’un disque tournoyant dans les étoiles, les planètes et les systèmes solaires. Ceci possède une grande signification. Si grande que les Mayas d’origine ne possédaient aucun symbole pour cela. Dans leur civilisation il n’y avait pas de nom pour « Dieu ». La connaissance du concept était suffisante.
Pour plus d’information sur le papillon Galactique :
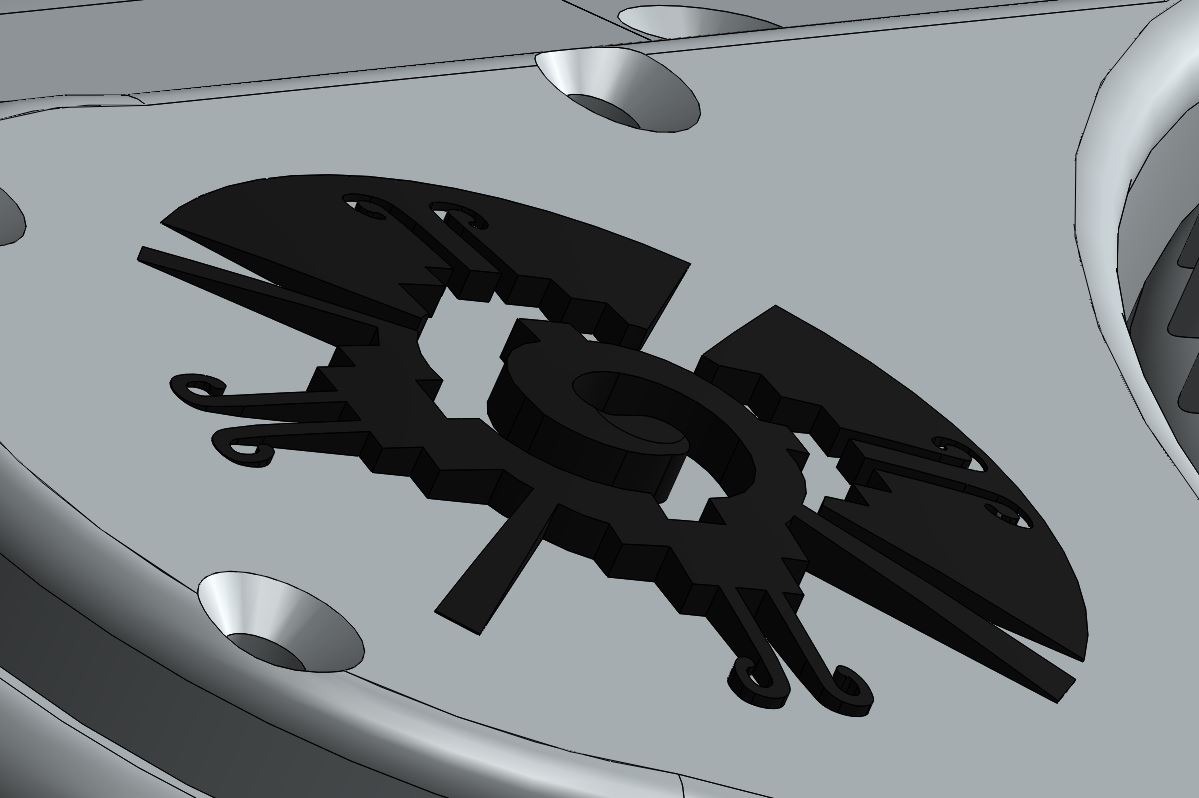
Ce symbole est appelé Hunab Ku ou Papillon Galactique dans la mythologie Maya . RedOhm
| Retour au sommaire |
![]()
03/12/2016 Montage du thorax , du cou , de la tête et essai de l’ensemble |
Maya construction du thorax , du cou ,de la tête RedOhm
| Retour au sommaire |
![]()
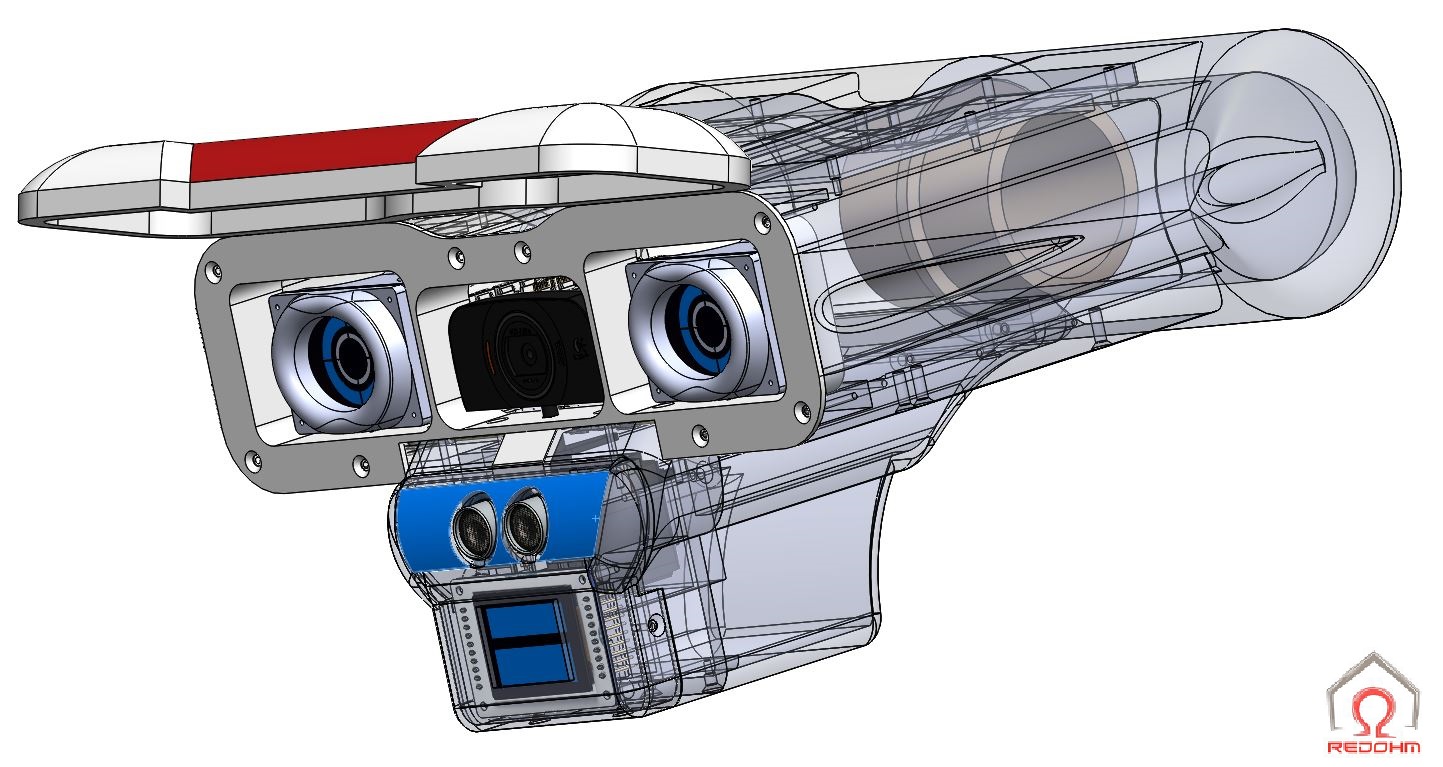
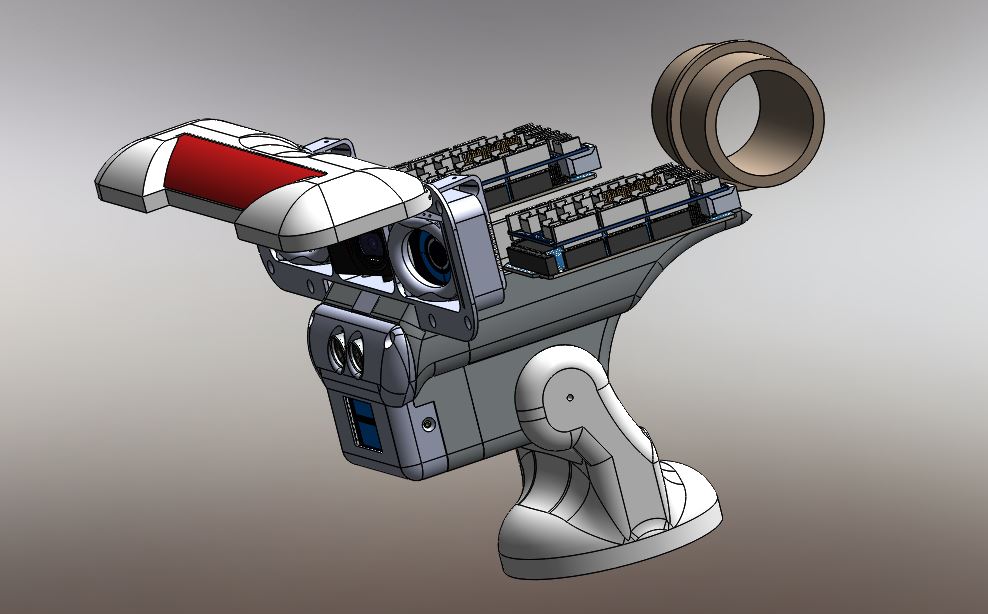
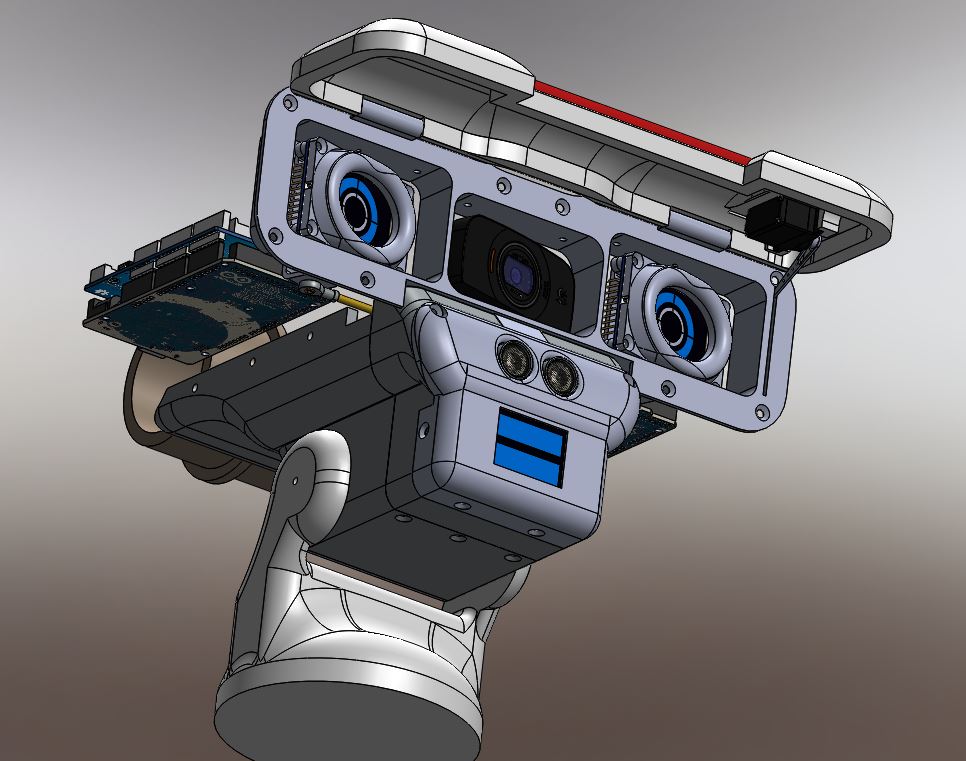
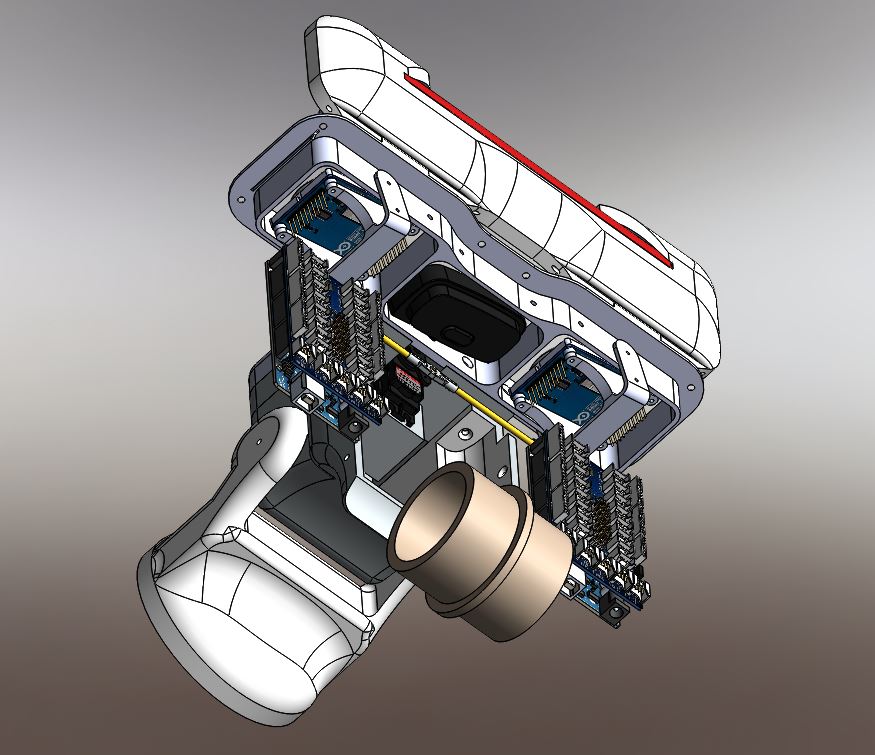
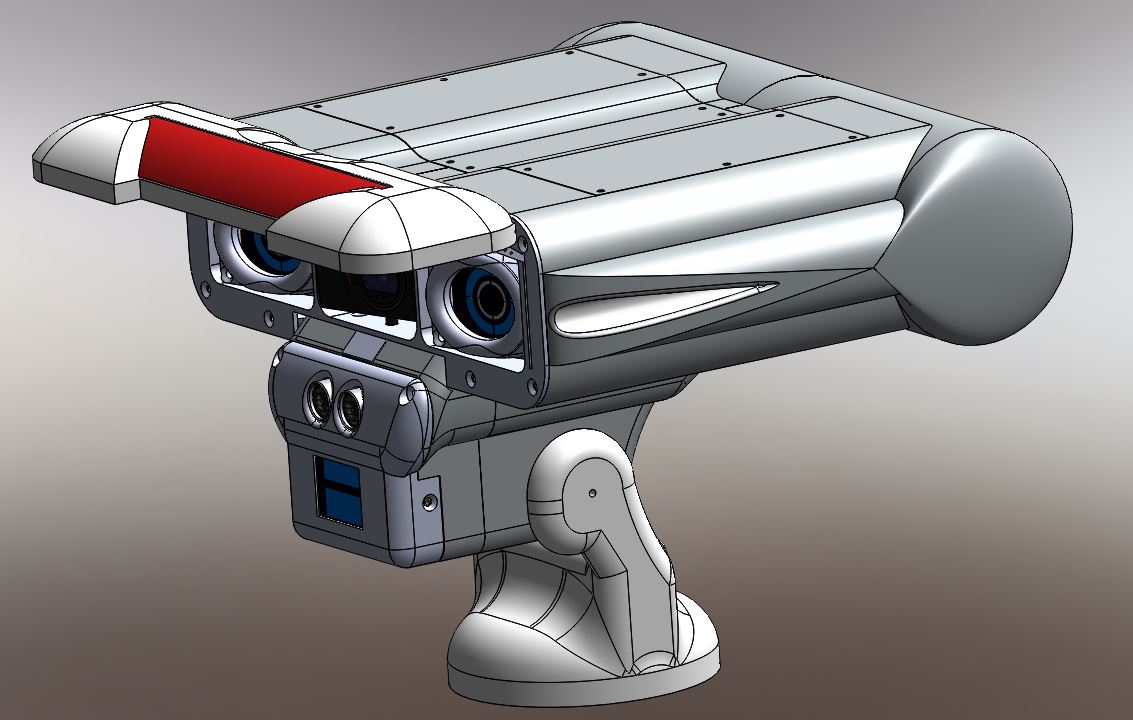
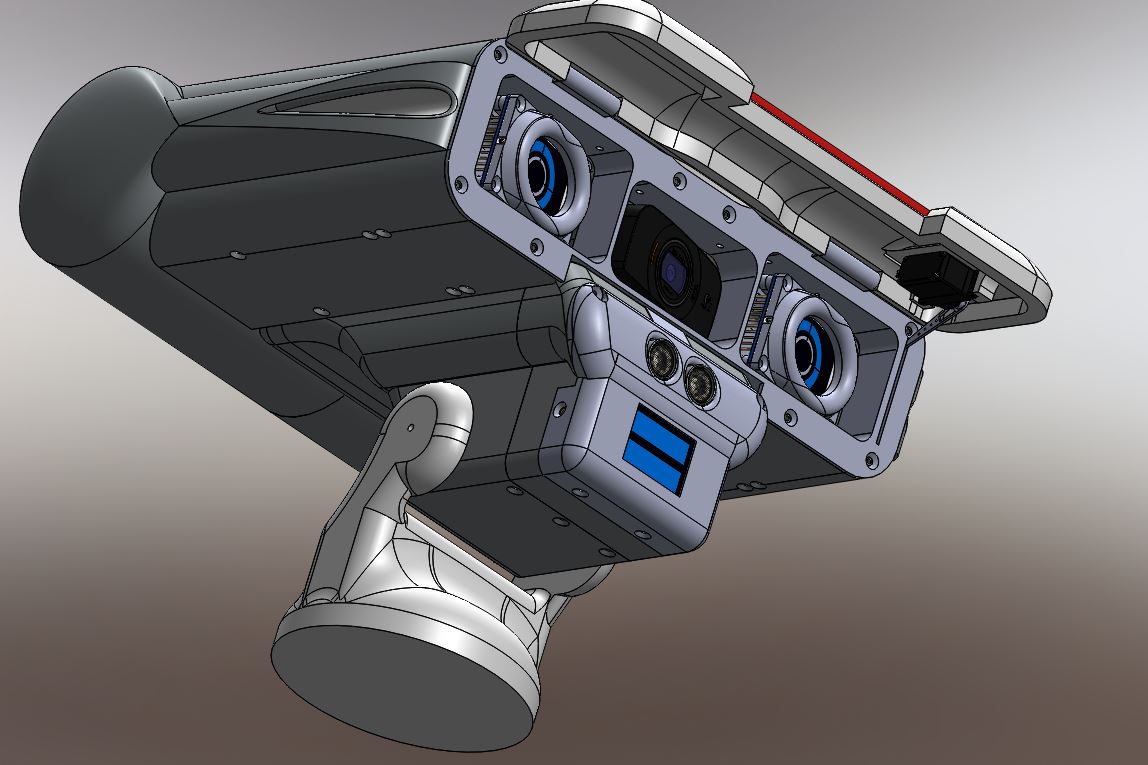
10/12/2016 Mise au point du système de vision pour la partie mécanique |
| Retour au sommaire |
![]()
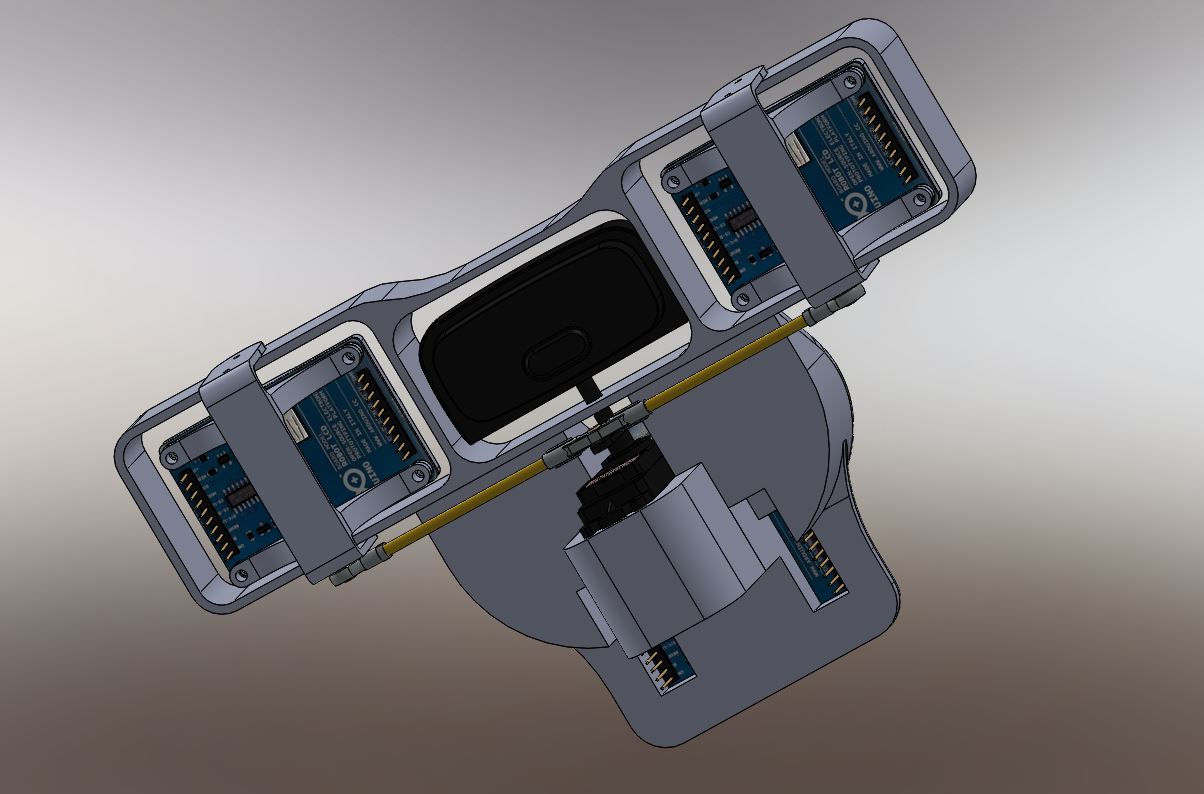
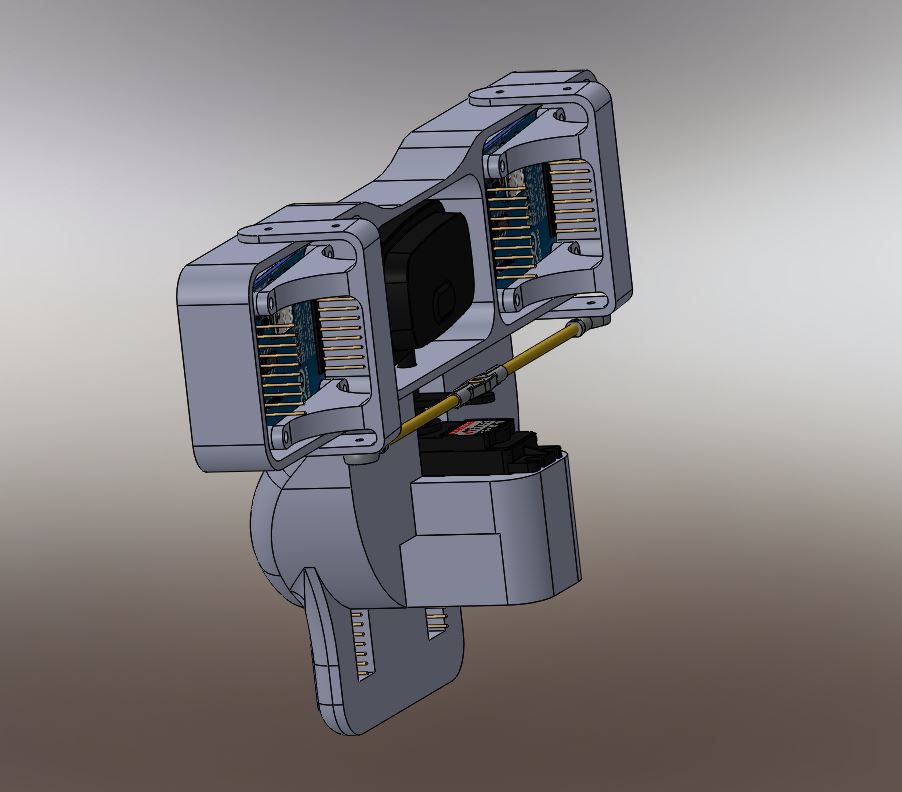
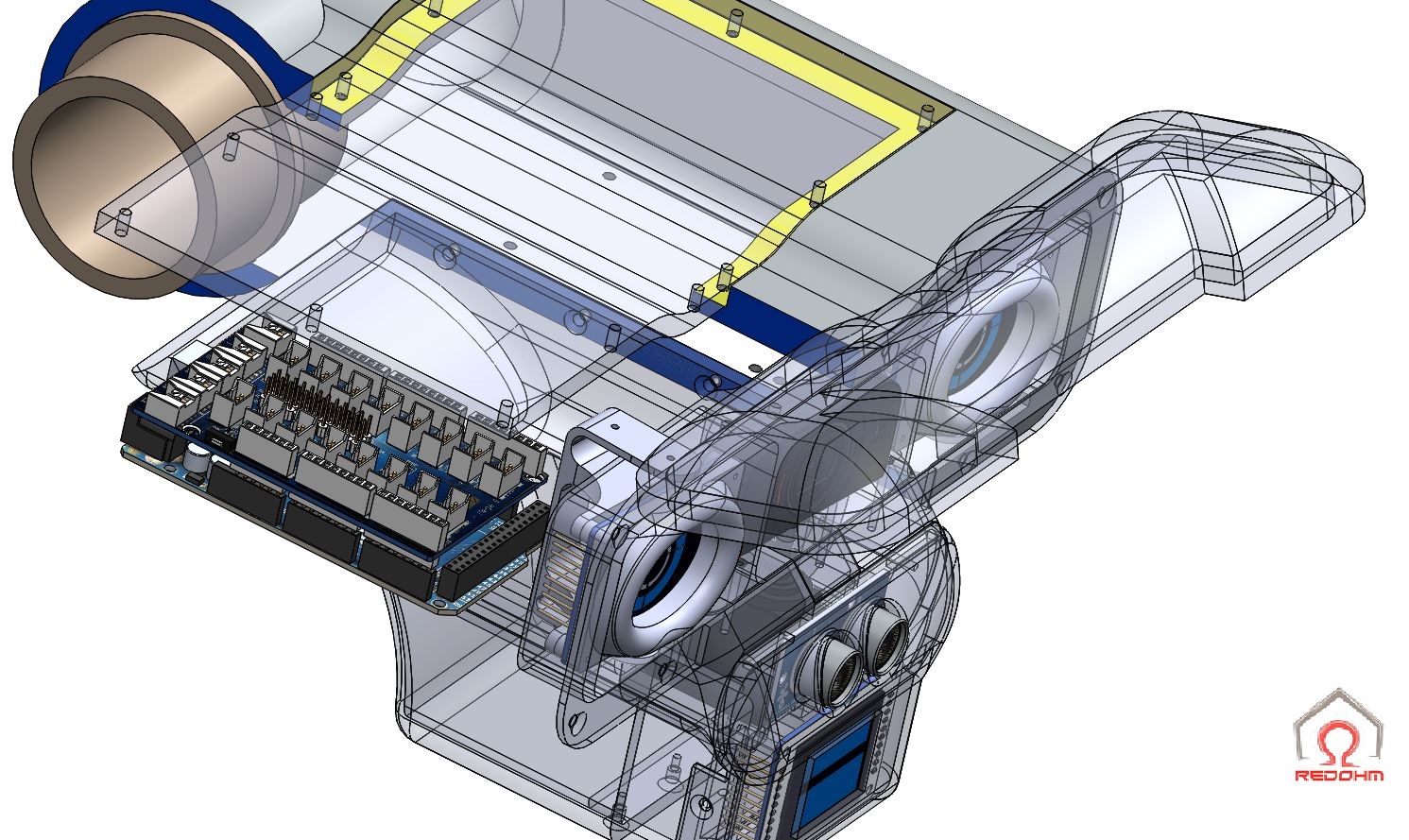
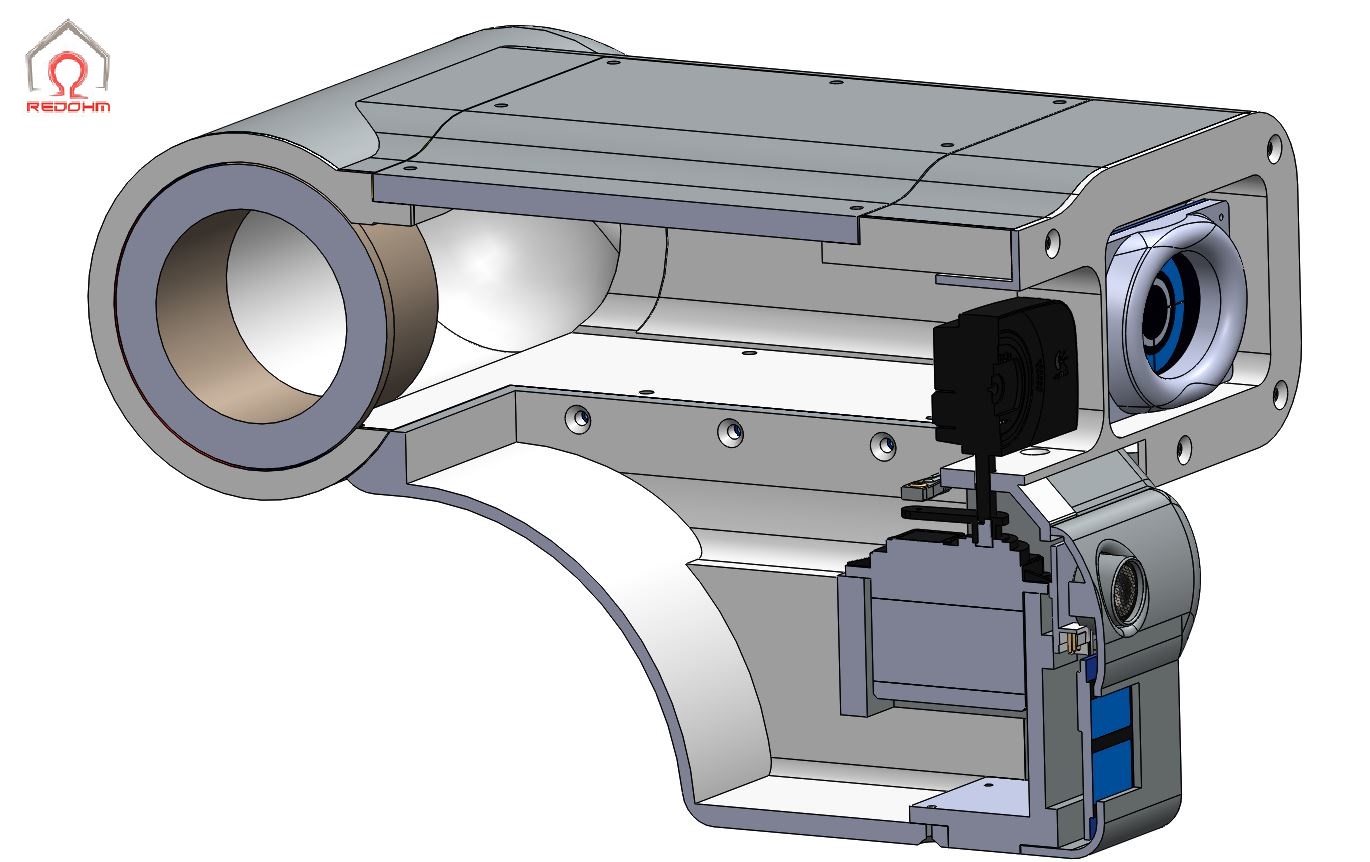
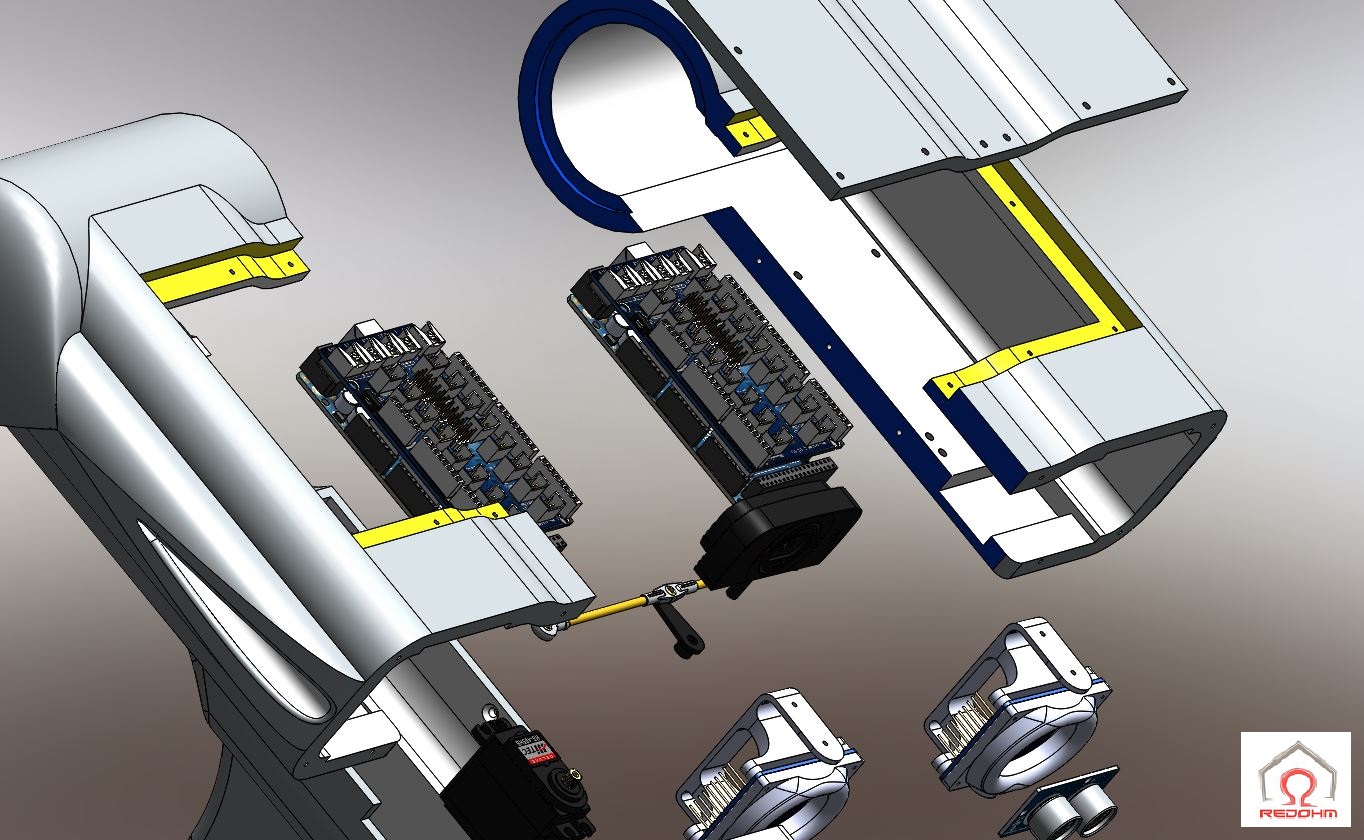
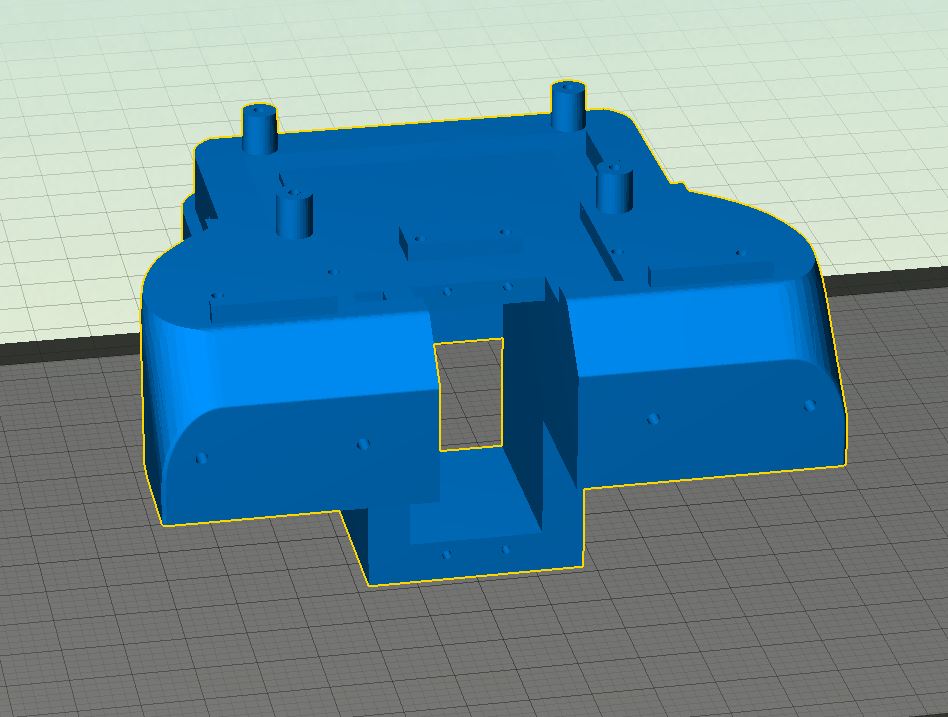
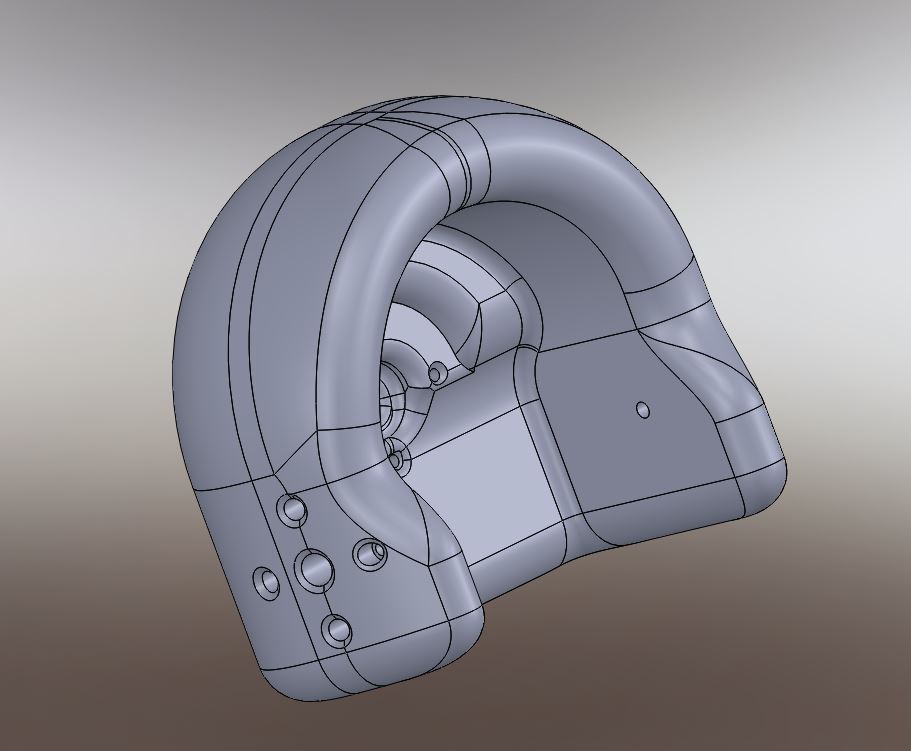
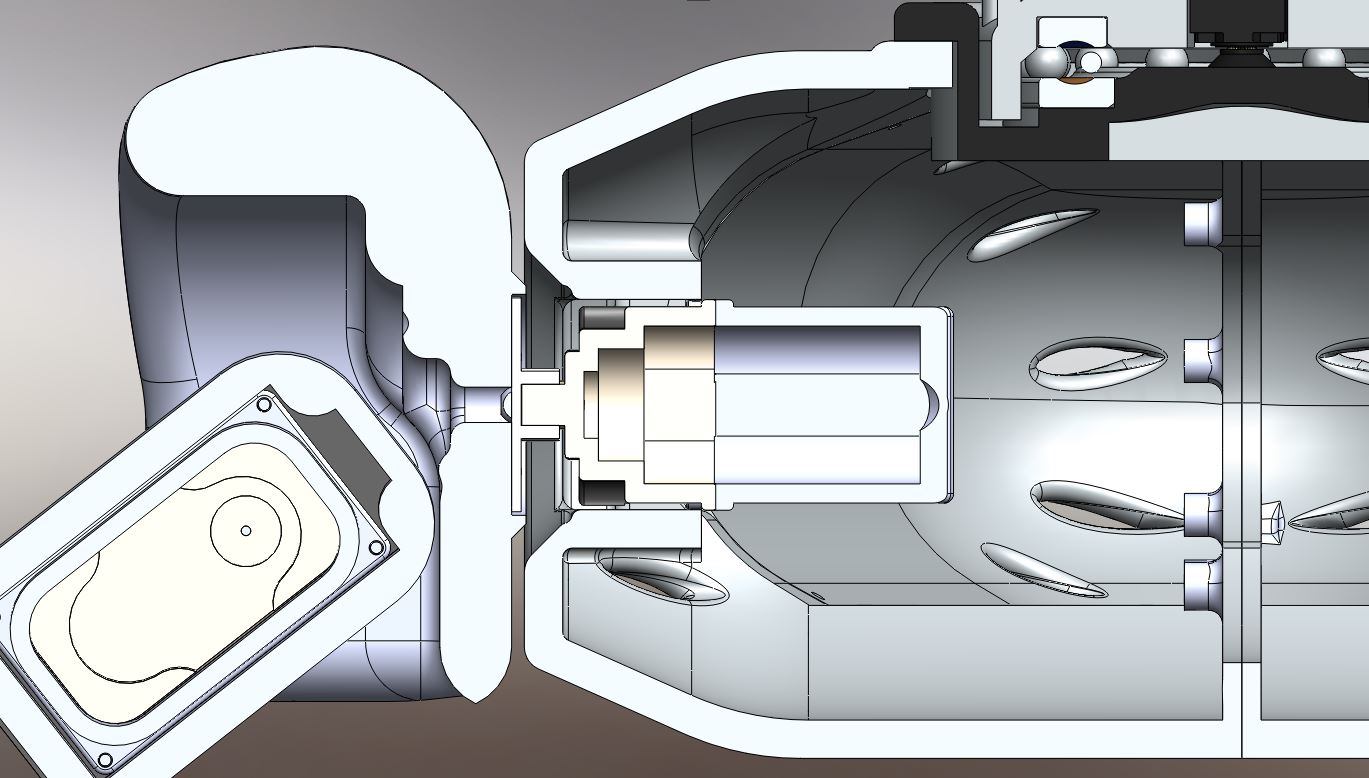
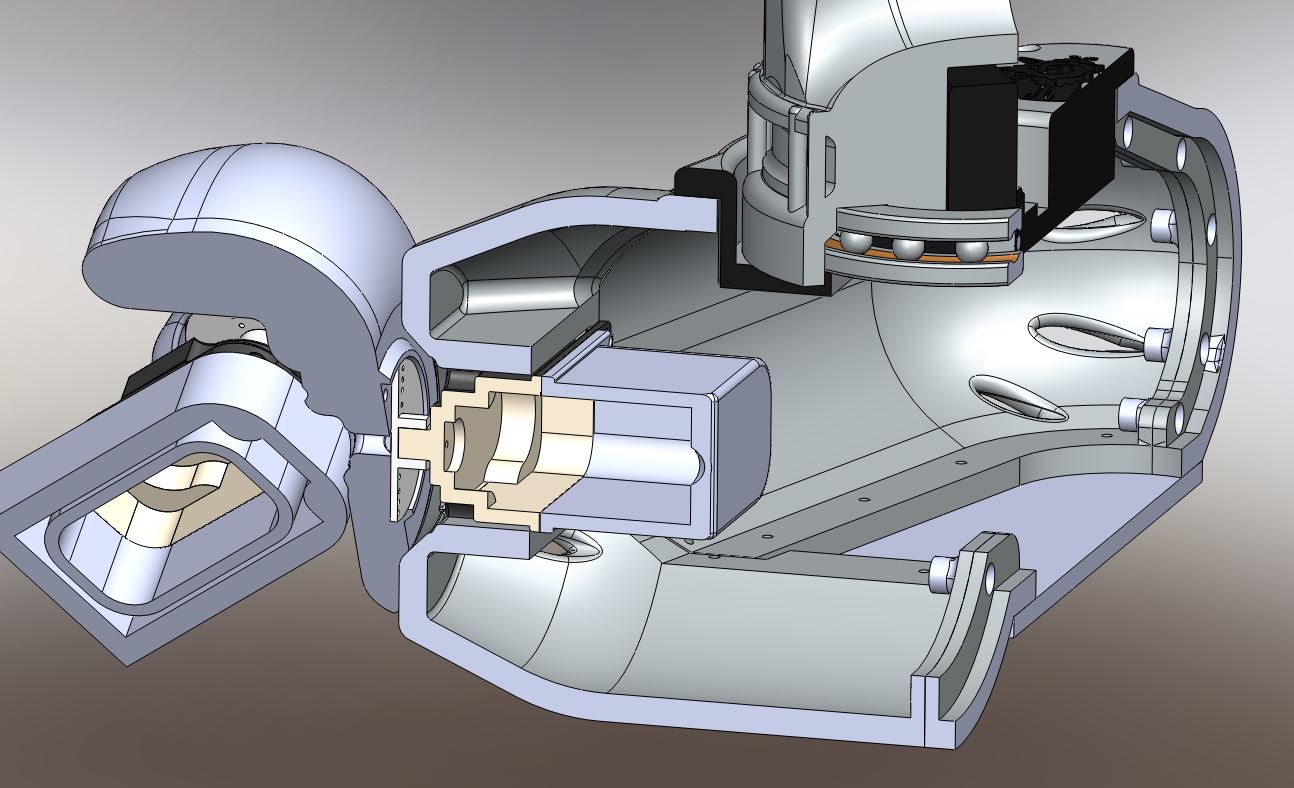
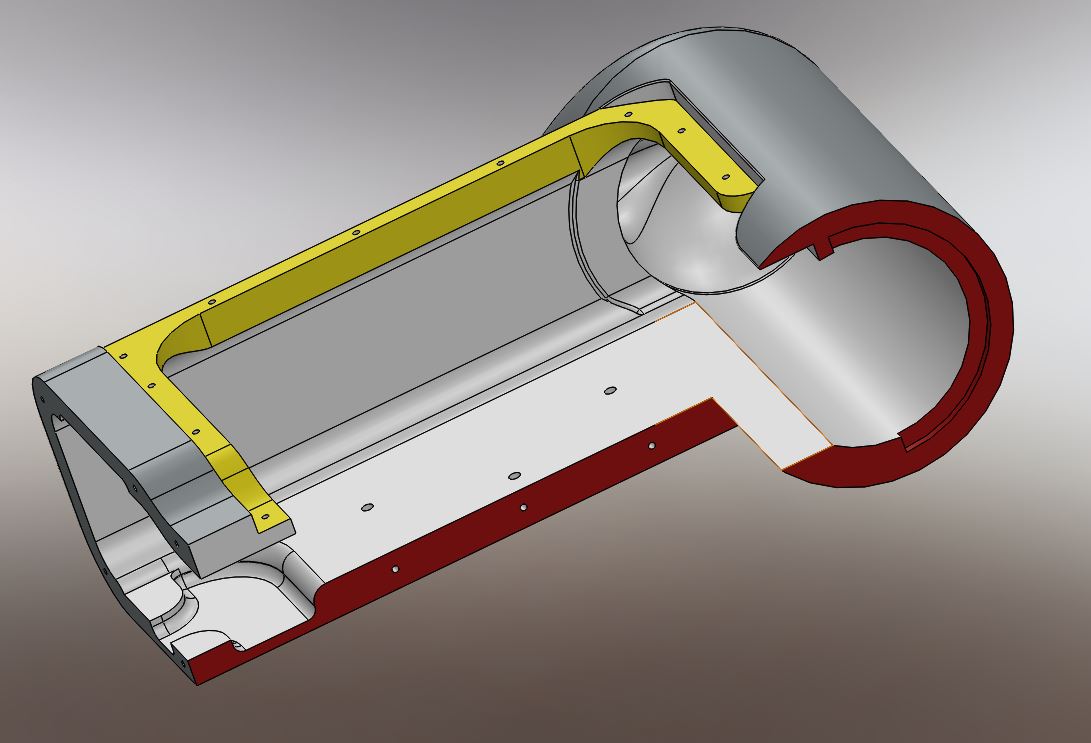
18/01/2017 Modification de l’encéphale |
Nous avons modifié la partie de l’encéphale mais il faut savoir que les versions 1.00 ou 2 .00 sont compatibles avec le reste des ensembles du robot Maya .Ces modifications ont pour but d’améliorer la pose des cartes ainsi que le câblage de celle-ci. Les personnes qui ont déjà démarré la version 1.00 ne doivent pas s’inquiéter, l’ensemble de la version 1.00 est opérationnelle.
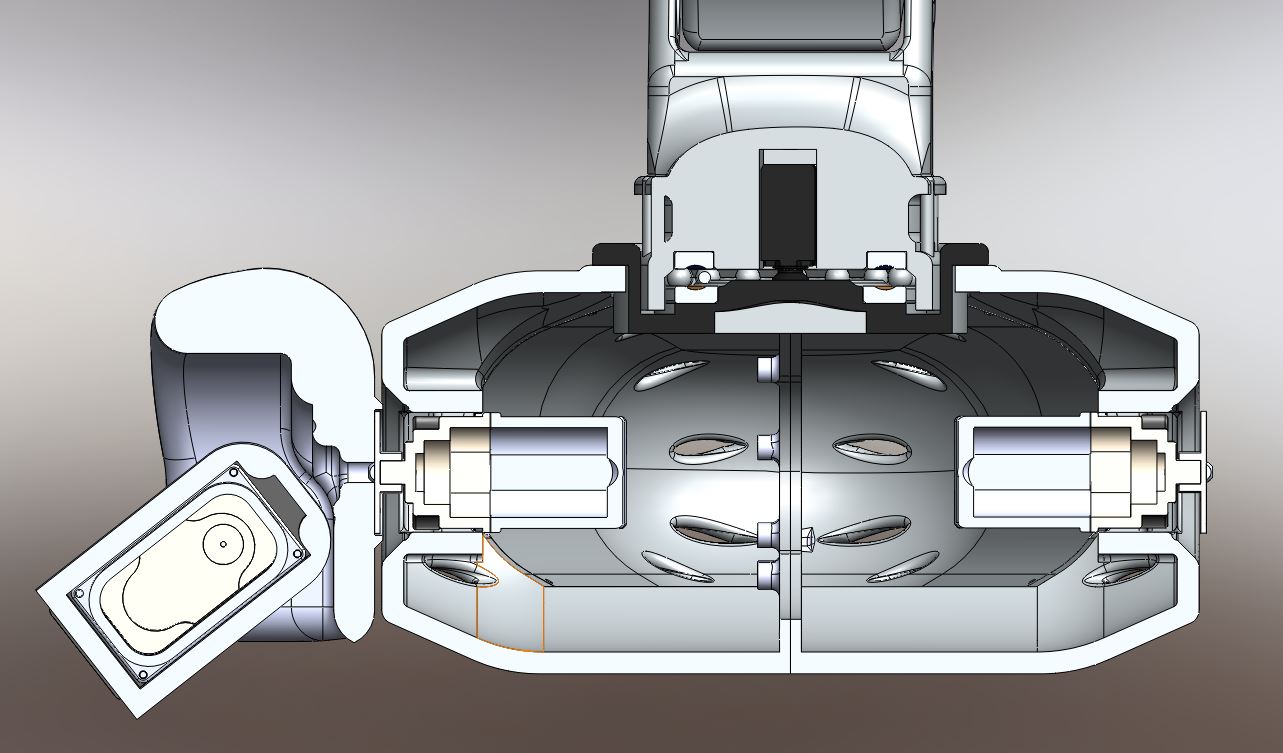
Ci-dessous une photo en coupe pour vous montrer le support carte Arduino , alors que dans la version 1.00 les cartes étaient visées sur les côtés de la boite crânienne
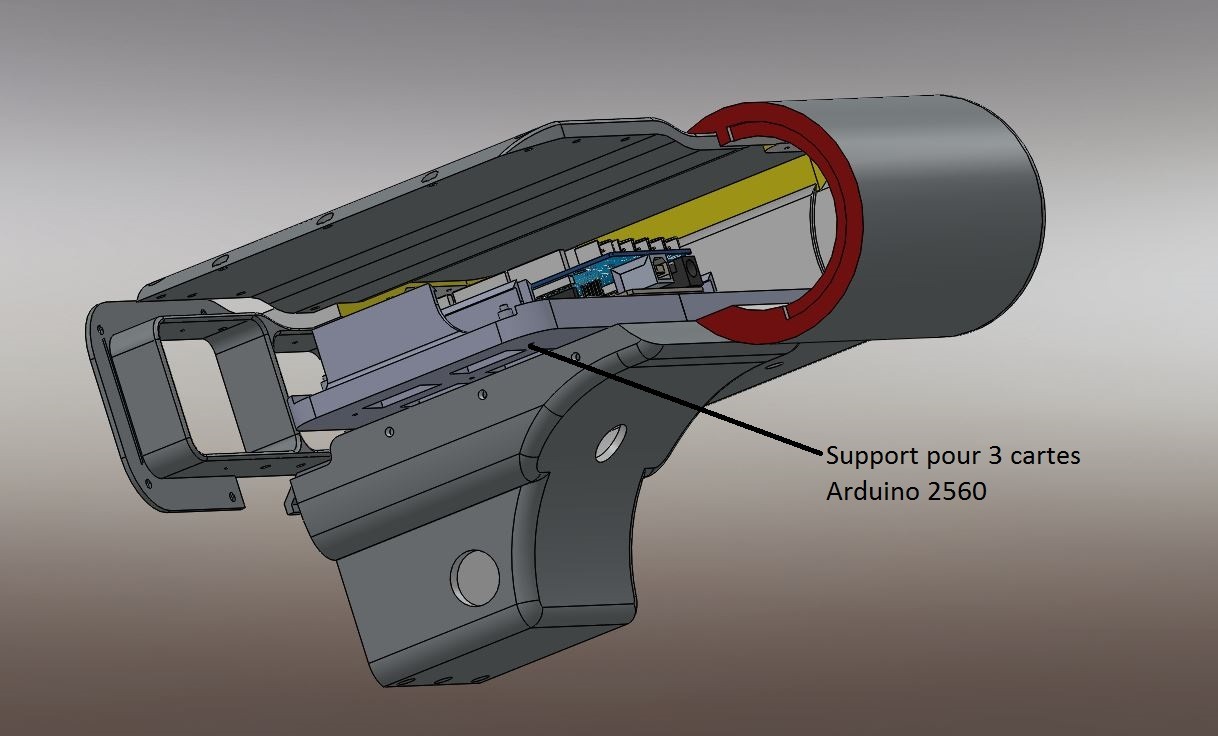
Encéphale avec support carte pour Arduino – RedOhm
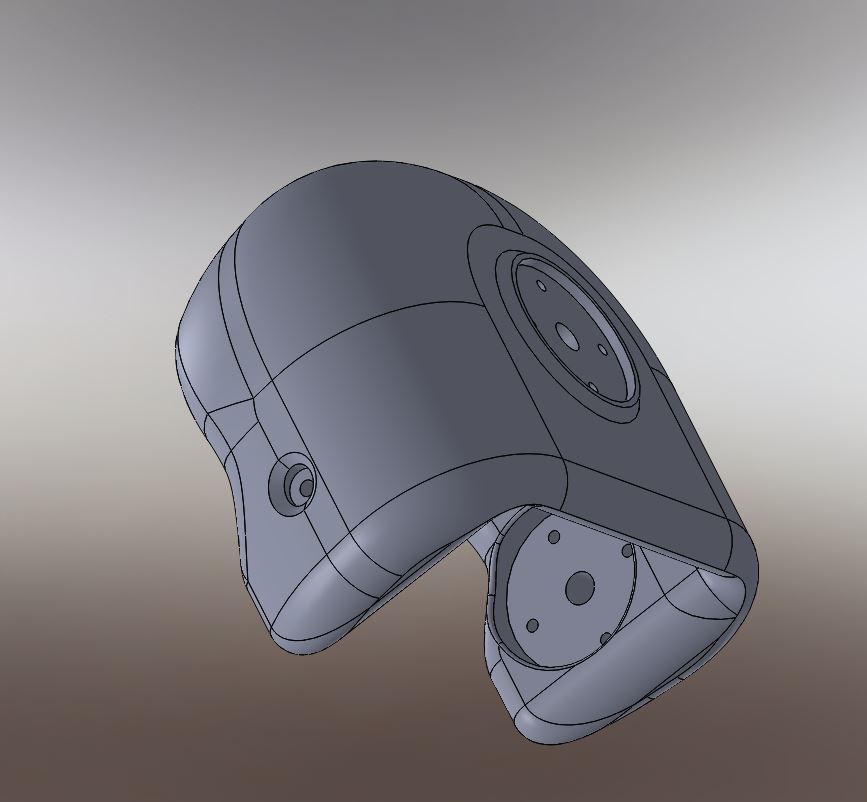
Modification et renforcement de la partie fixation de la face avant
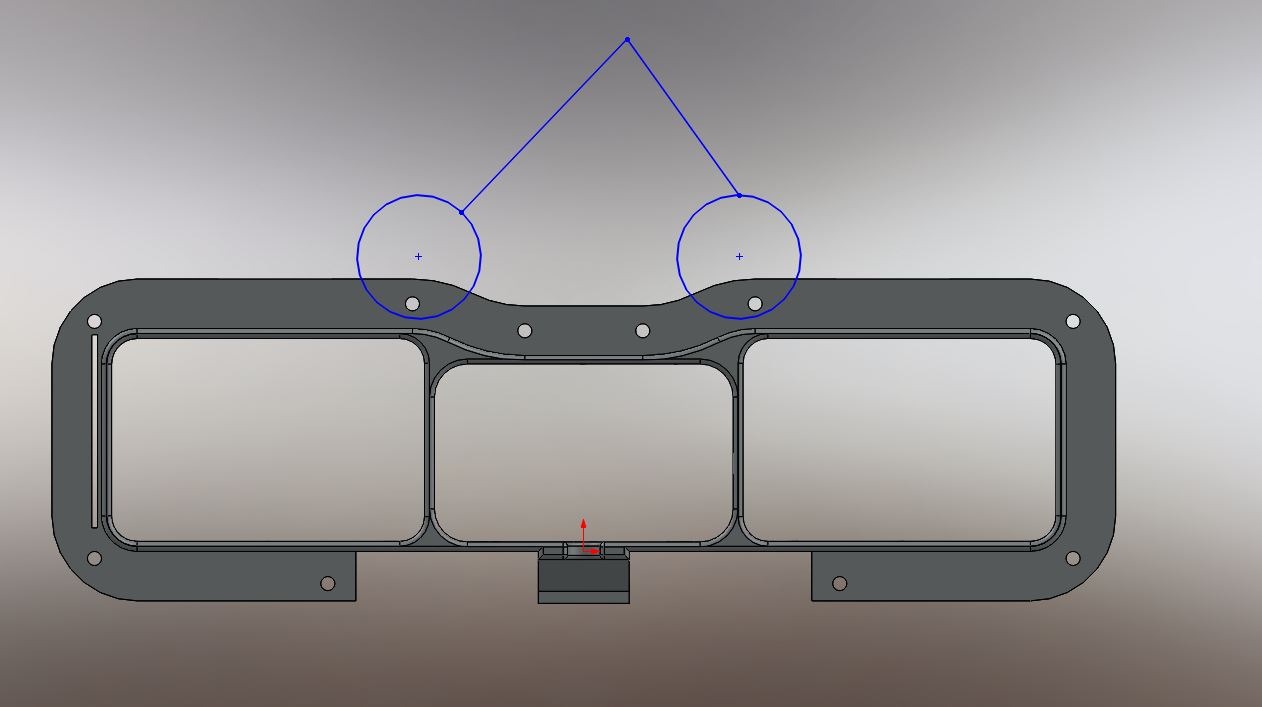
Robot Maya cache face avant renfort de la partie fixation RedOhm
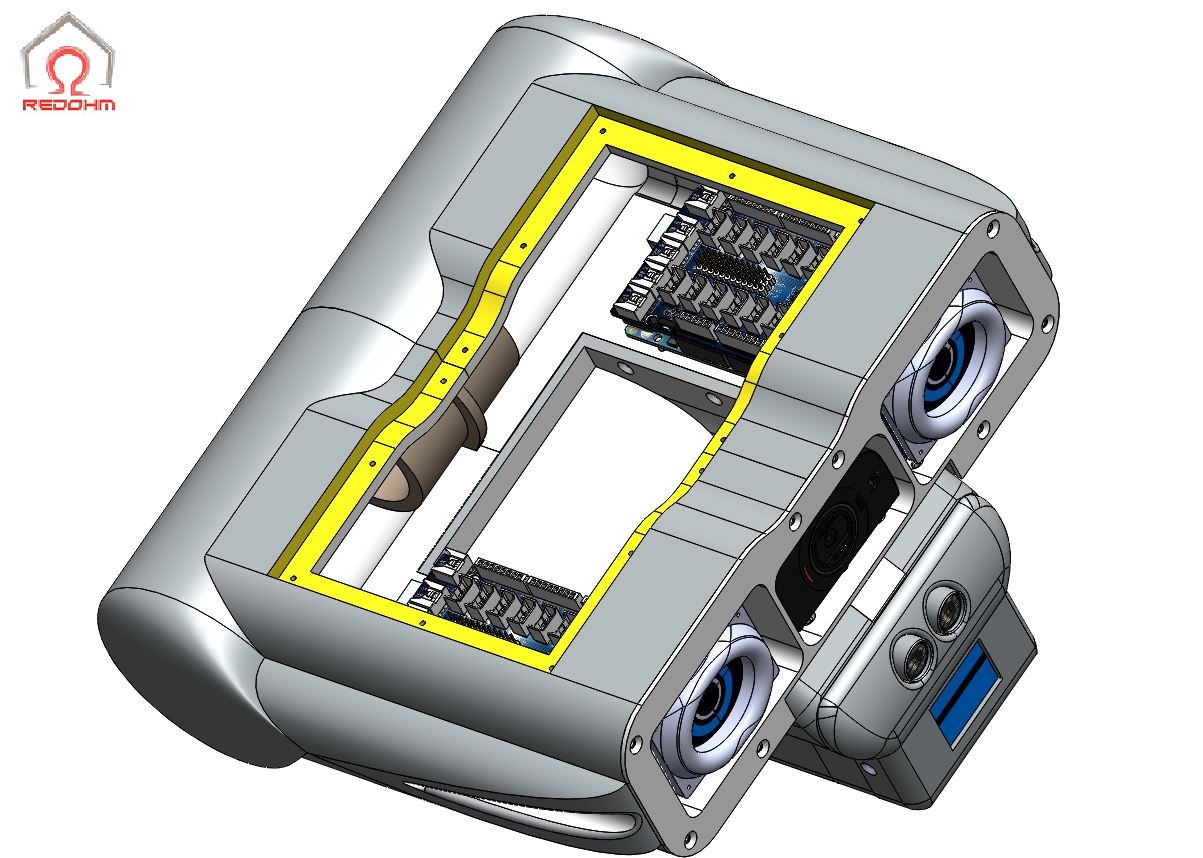
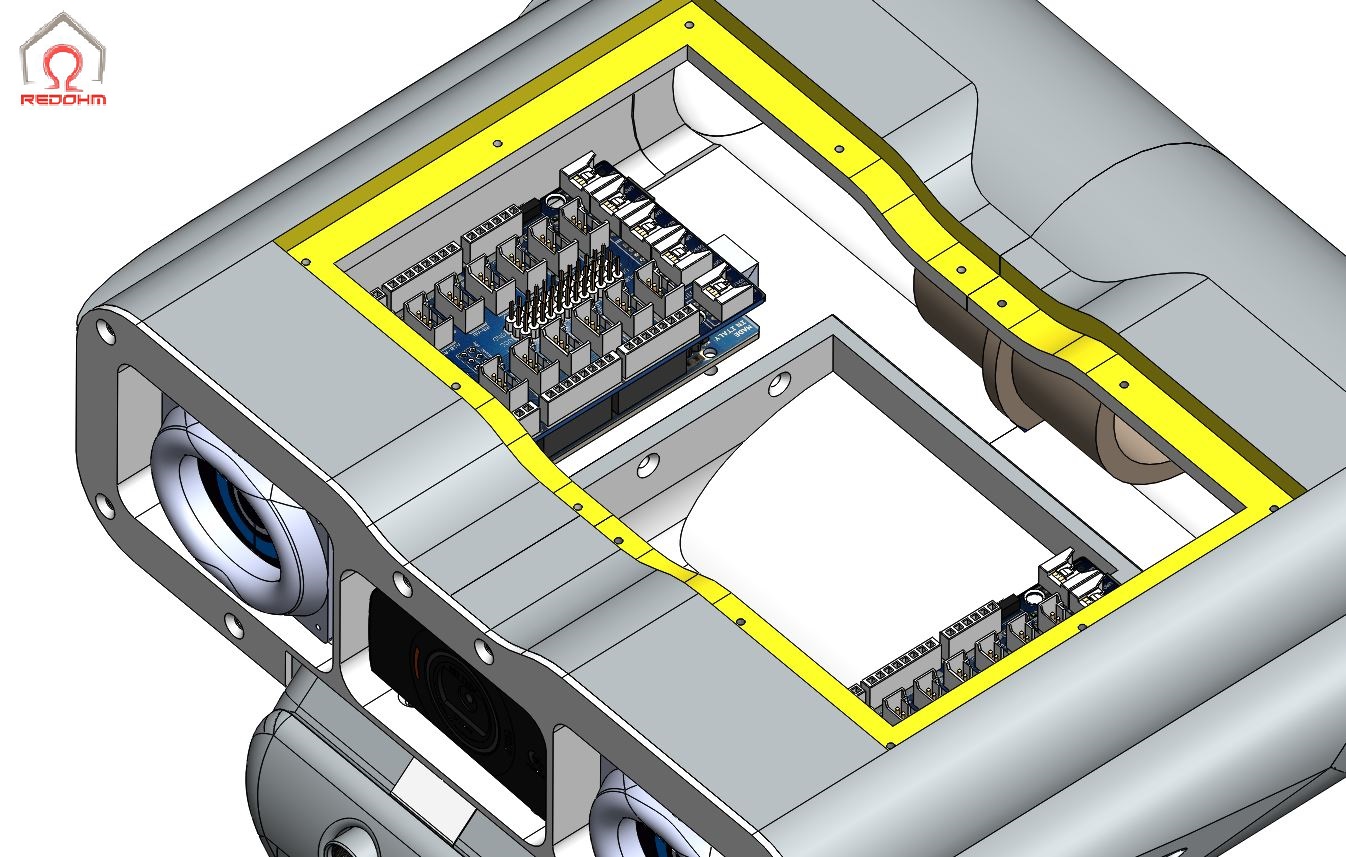
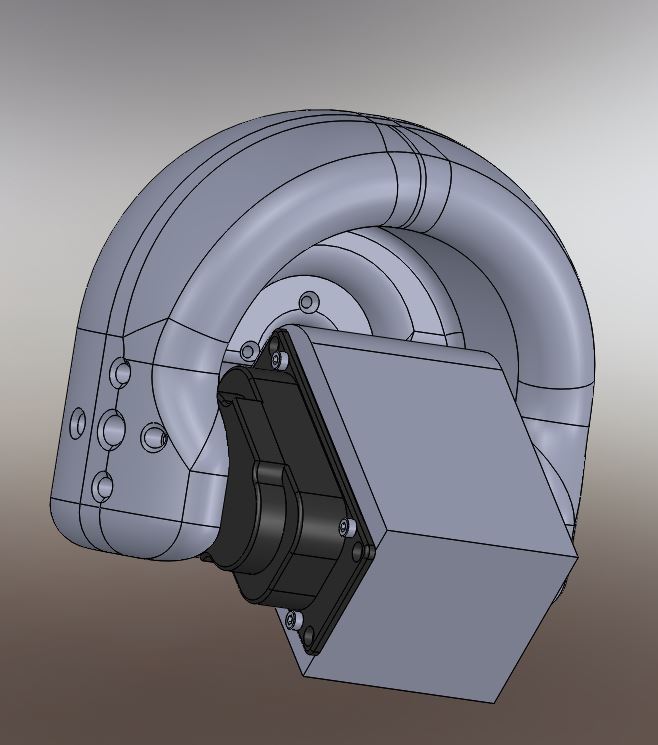
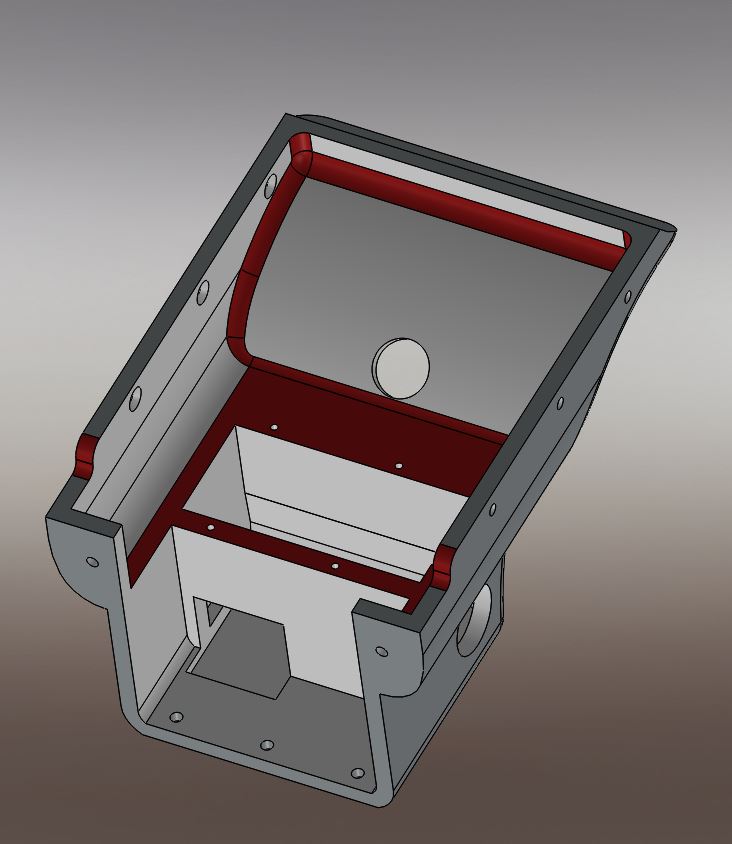
L’ouverture d’accès de l’encéphale agrandit de Maya pour la pose et le câblage des cartes Arduino
L’ouverture d’accès de l’encéphale agrandit de Maya – RedOhm
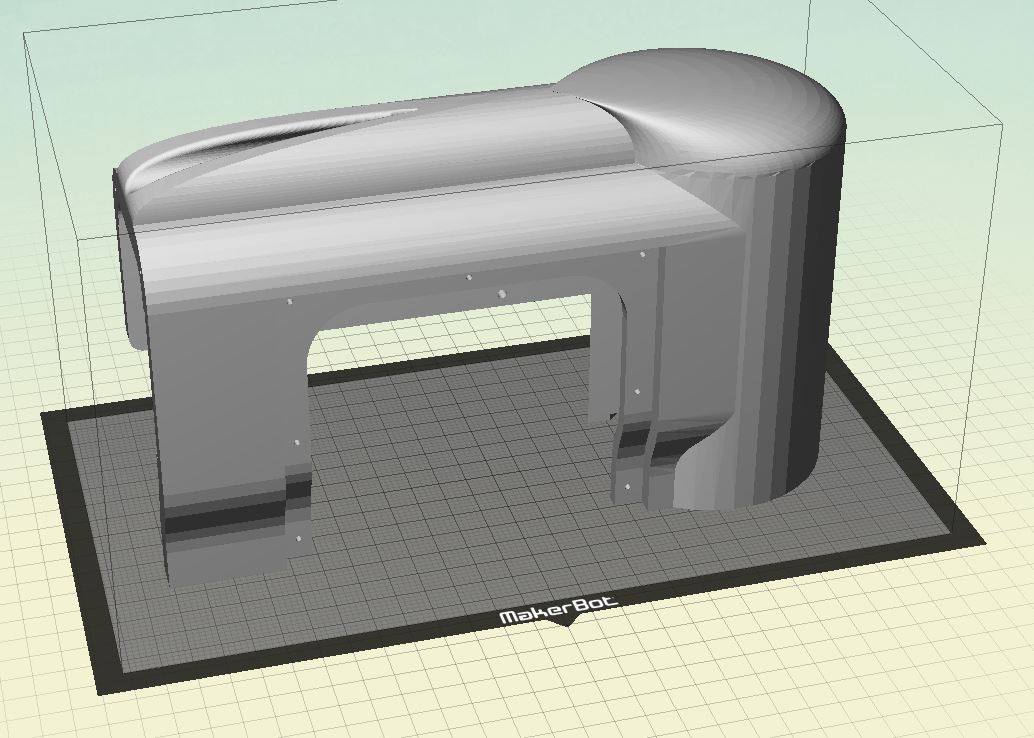
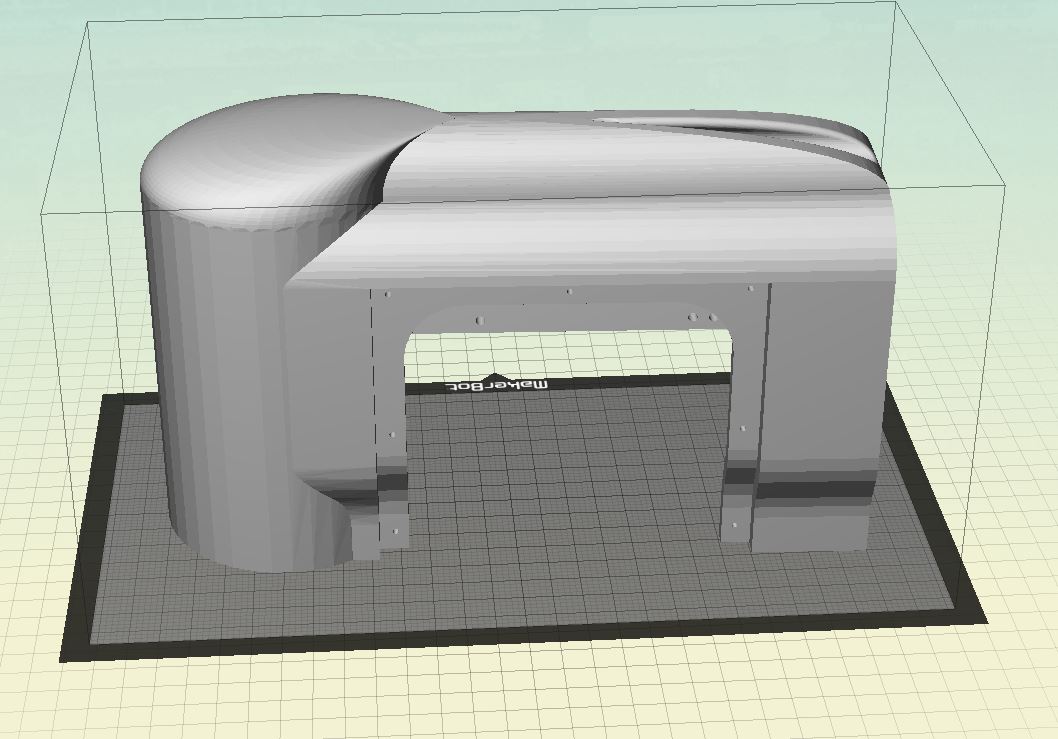
Nouveau capot suite aux modifications de l’ouverture. 2 versions de ce capot seront disponibles. Une pour les imprimantes 200*200*200 et une version pour les imprimantes avec un espace supérieur à celui précité.
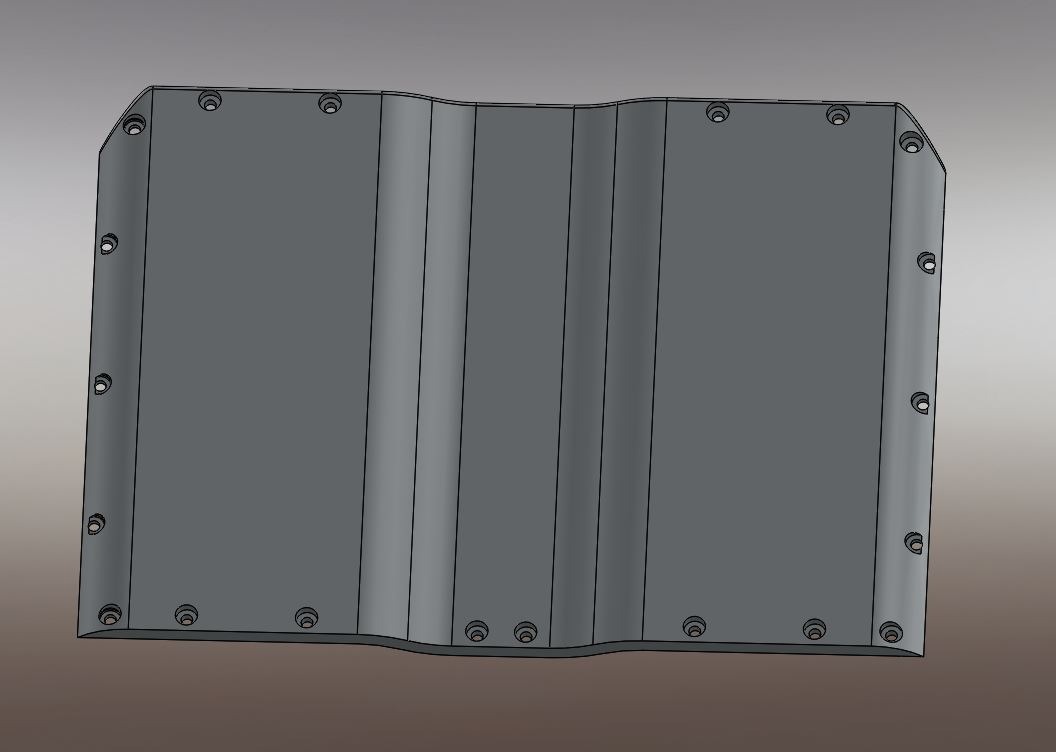
Nouveau capot suite aux modification de l’ouverture – RedOhm
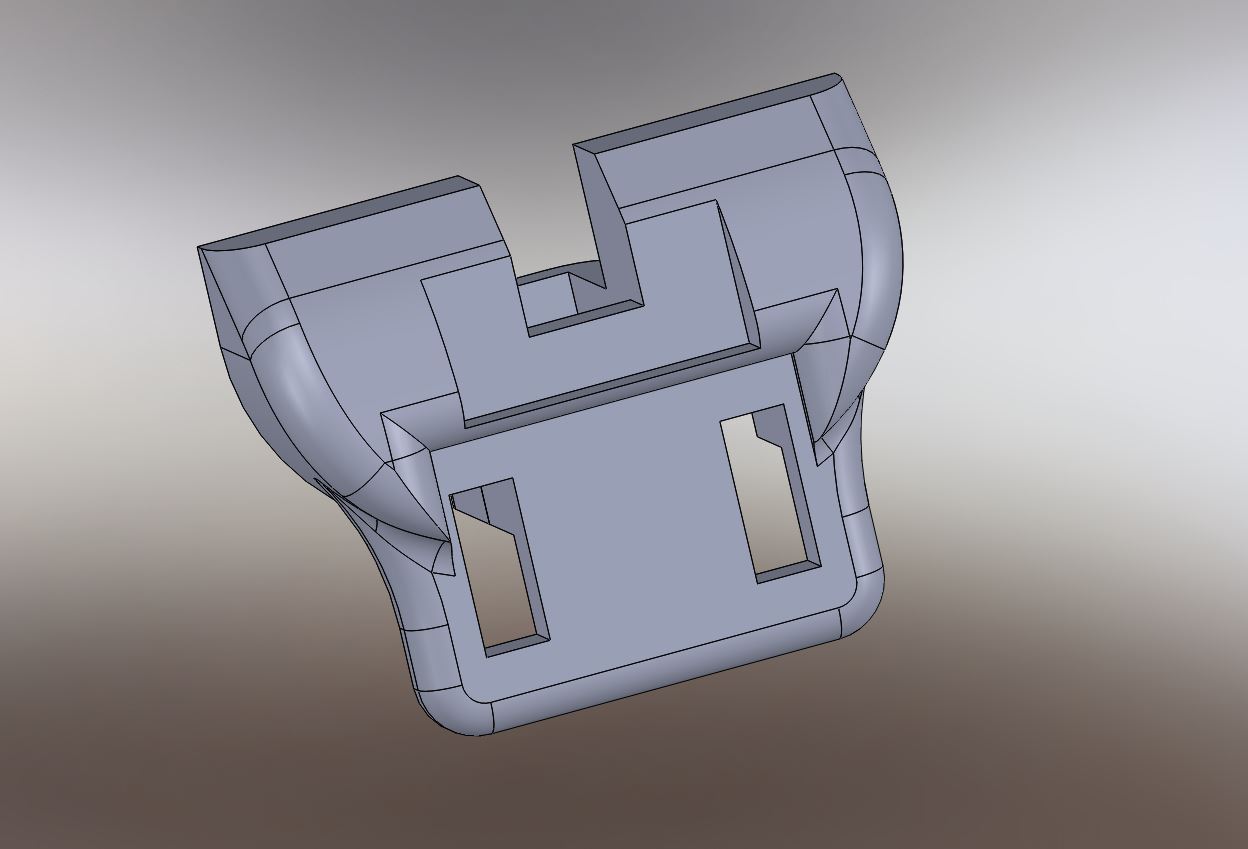
Pièce d’assemblage modifiée pour gagner de la place en vue du câblage des cartes électroniques
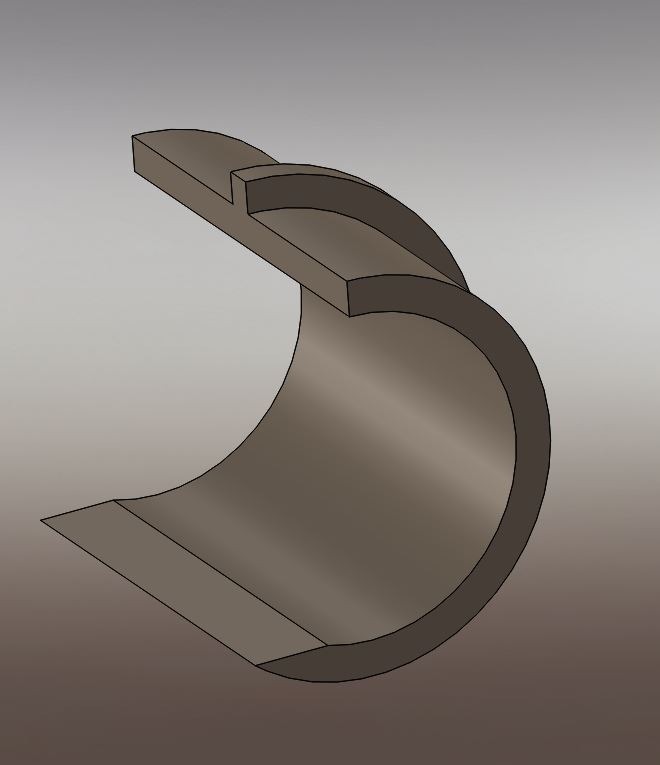
Pièce d’assemblage modifiée robot Maya – RedOhm
Modification seulement pour le rendu de la pièce
Modification seulement pour le rendu de la pièce – RedOhm
Aperçu de l’ensemble des modifications du robot Maya
Aperçu de l’ensemble des modifications – RedOhm
| Retour au sommaire |
![]()
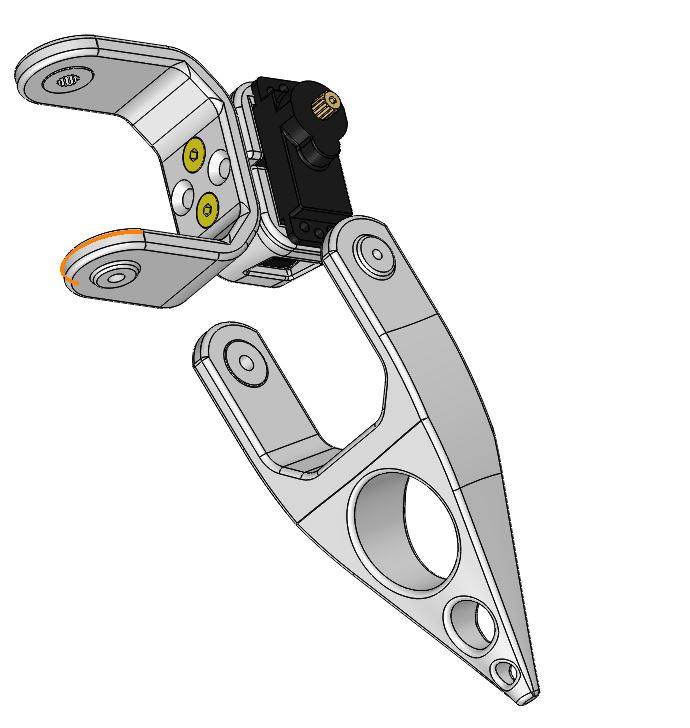
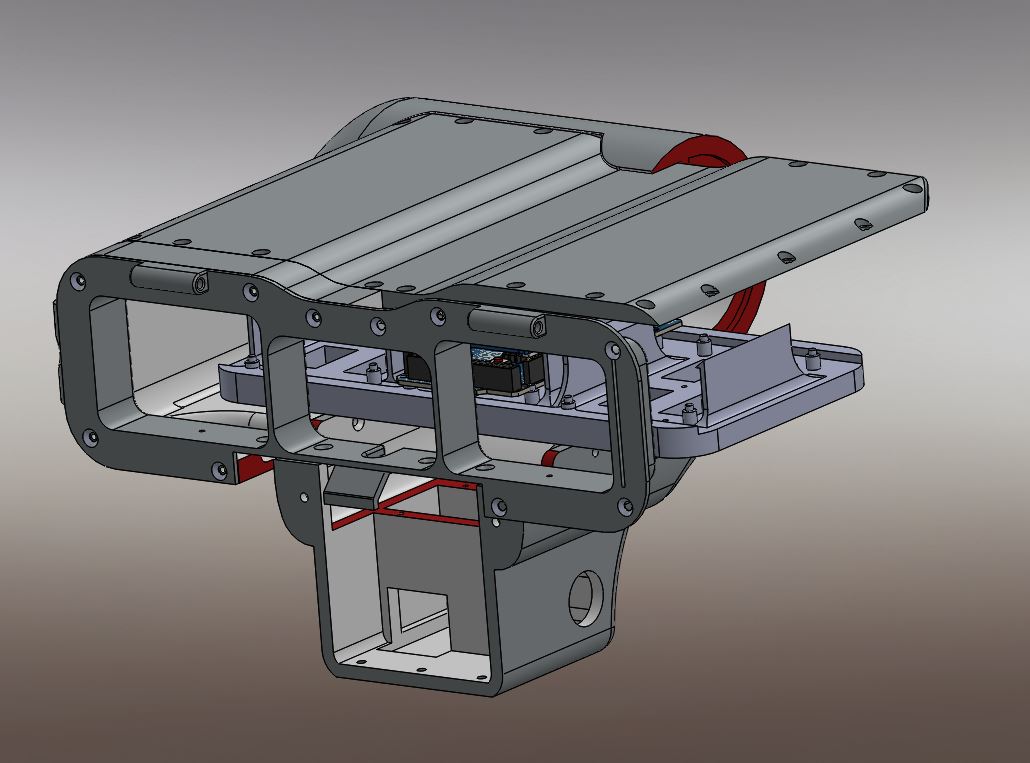
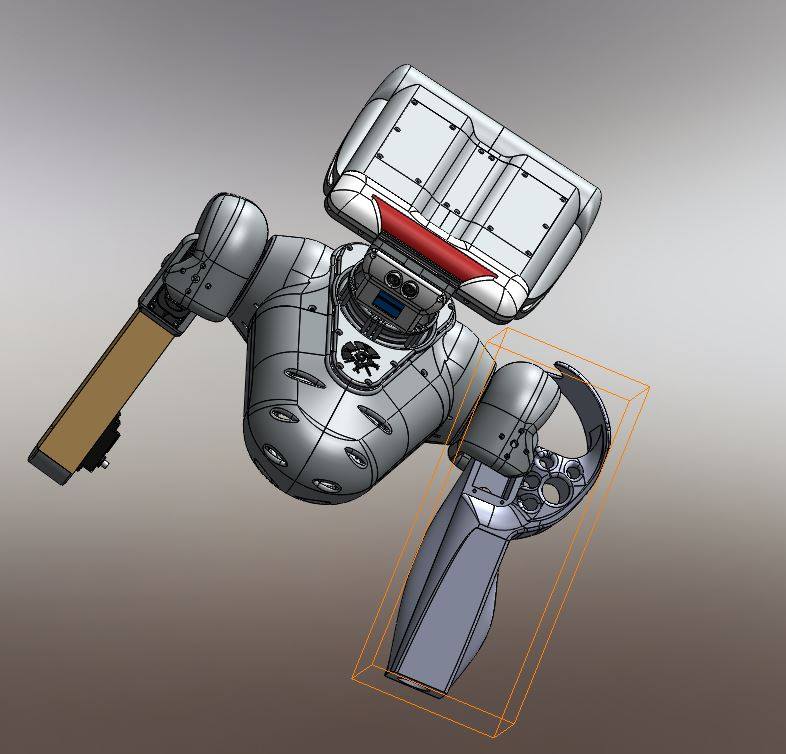
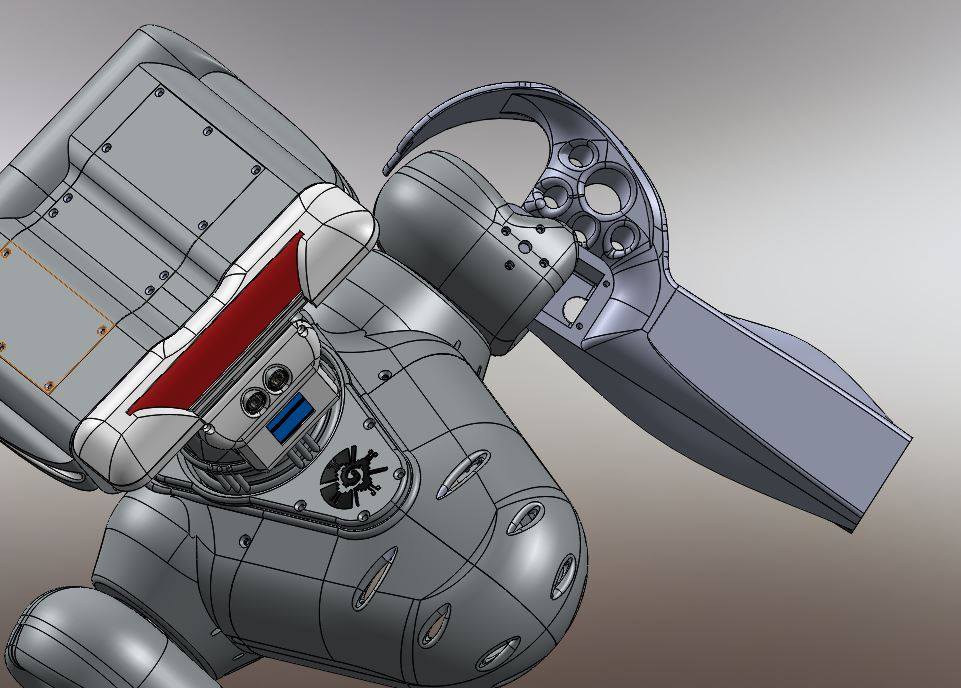
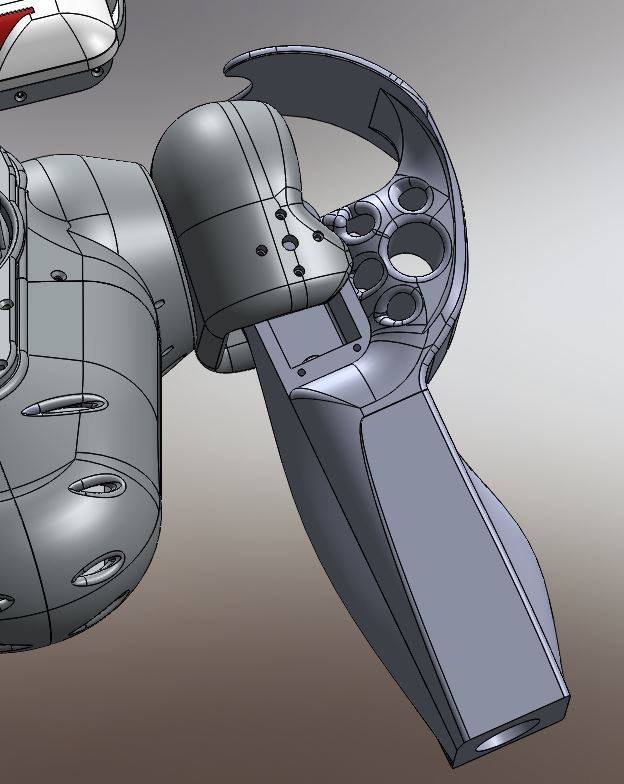
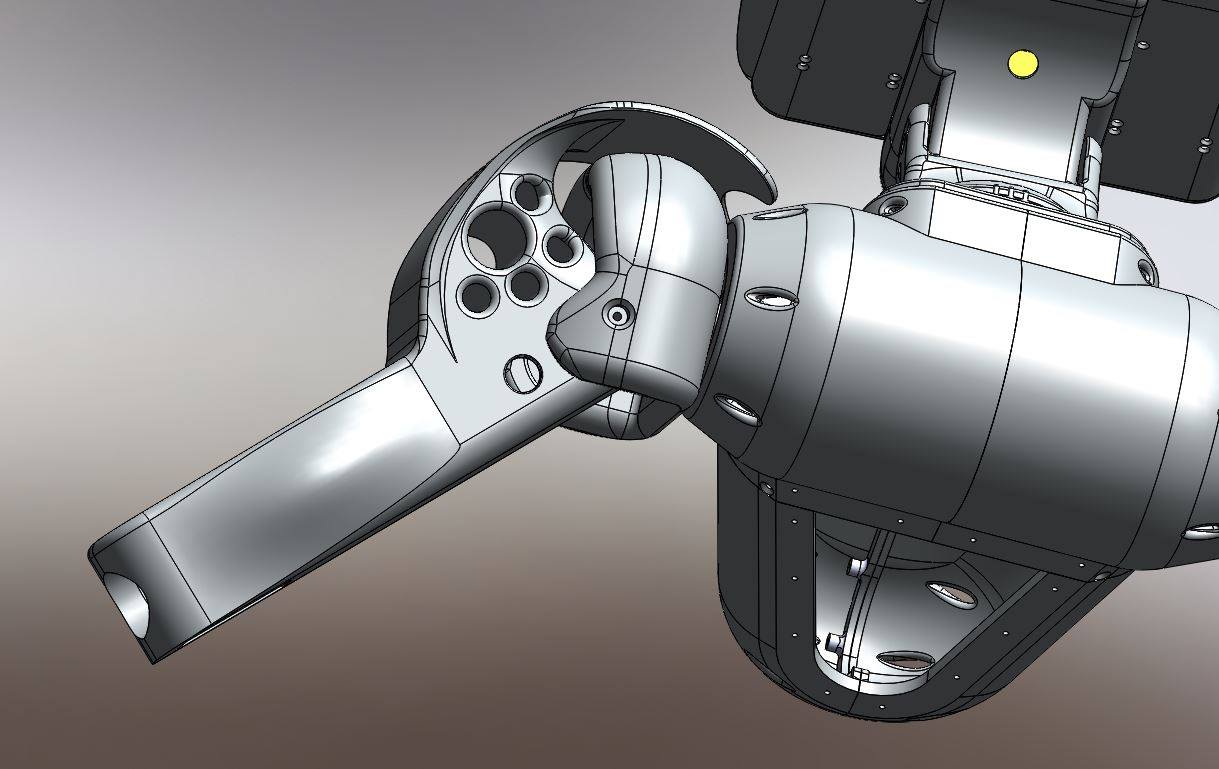
29/01/2017 Etude du bras Phase n-1 |
Voici une première étude de la partie du bras de Maya. Comme vous avez pu l’observer sur le dessin les servomoteurs sont en entraînement direct. Le bras est rattaché à l’épaule par un servomoteur en entraînement direct (les seules démultiplications sont à l’intérieur du servomoteur).Celui-ci assurera la rotation de l’épaule, un second servomoteur monté dans la cage de l’épaule assurera l’élévation du bras. Le type de servomoteur choisi nous permettra de porter des charges relativement conséquentes (les tests nous confirmeront le poids des charges déplacées)
Etude des bras de Maya – RedOhm -001
Etude des bras de Maya – RedOhm -002
Etude des bras de Maya – RedOhm -003

Etude des bras de Maya – RedOhm -004
Etude des bras de Maya – RedOhm -005

Etude des bras de Maya – RedOhm -006
| Retour au sommaire |
![]()
![]()