–
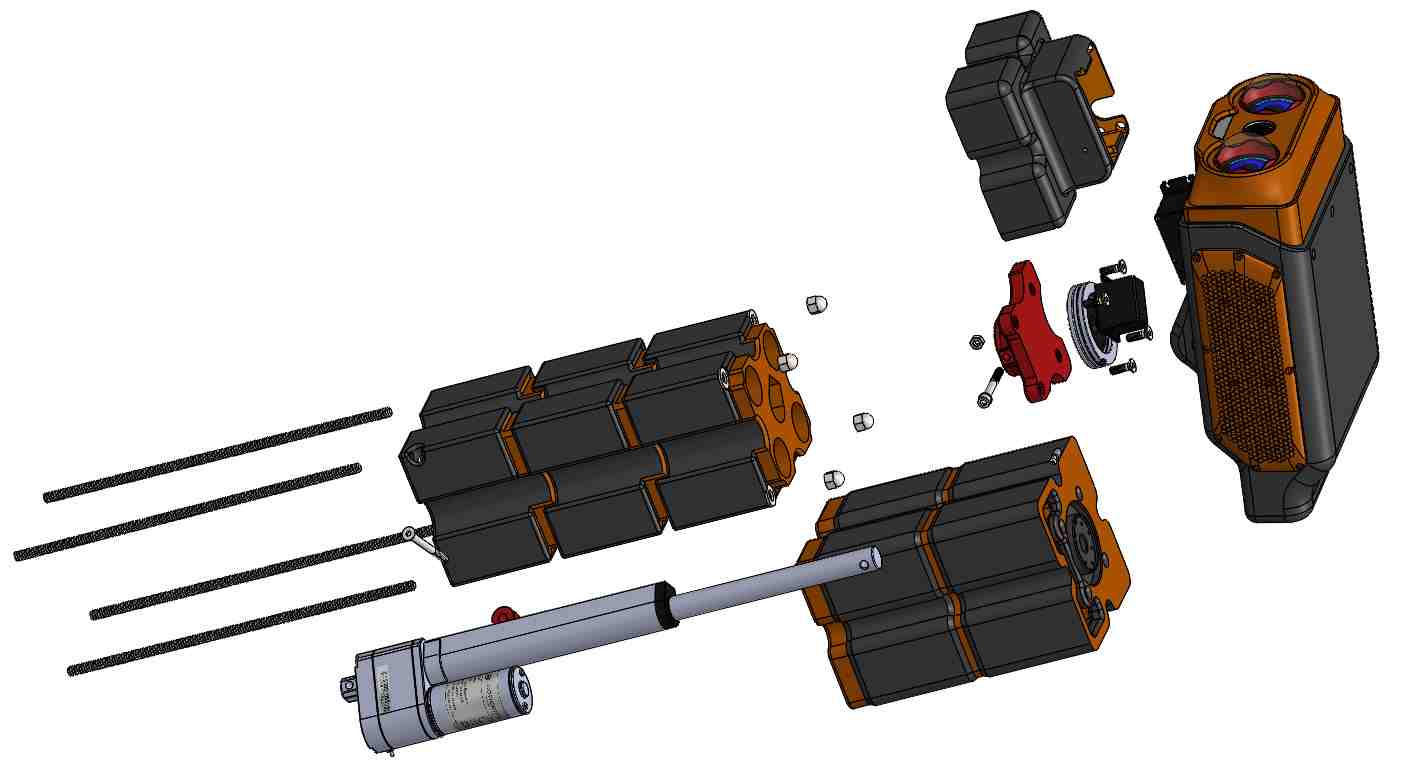
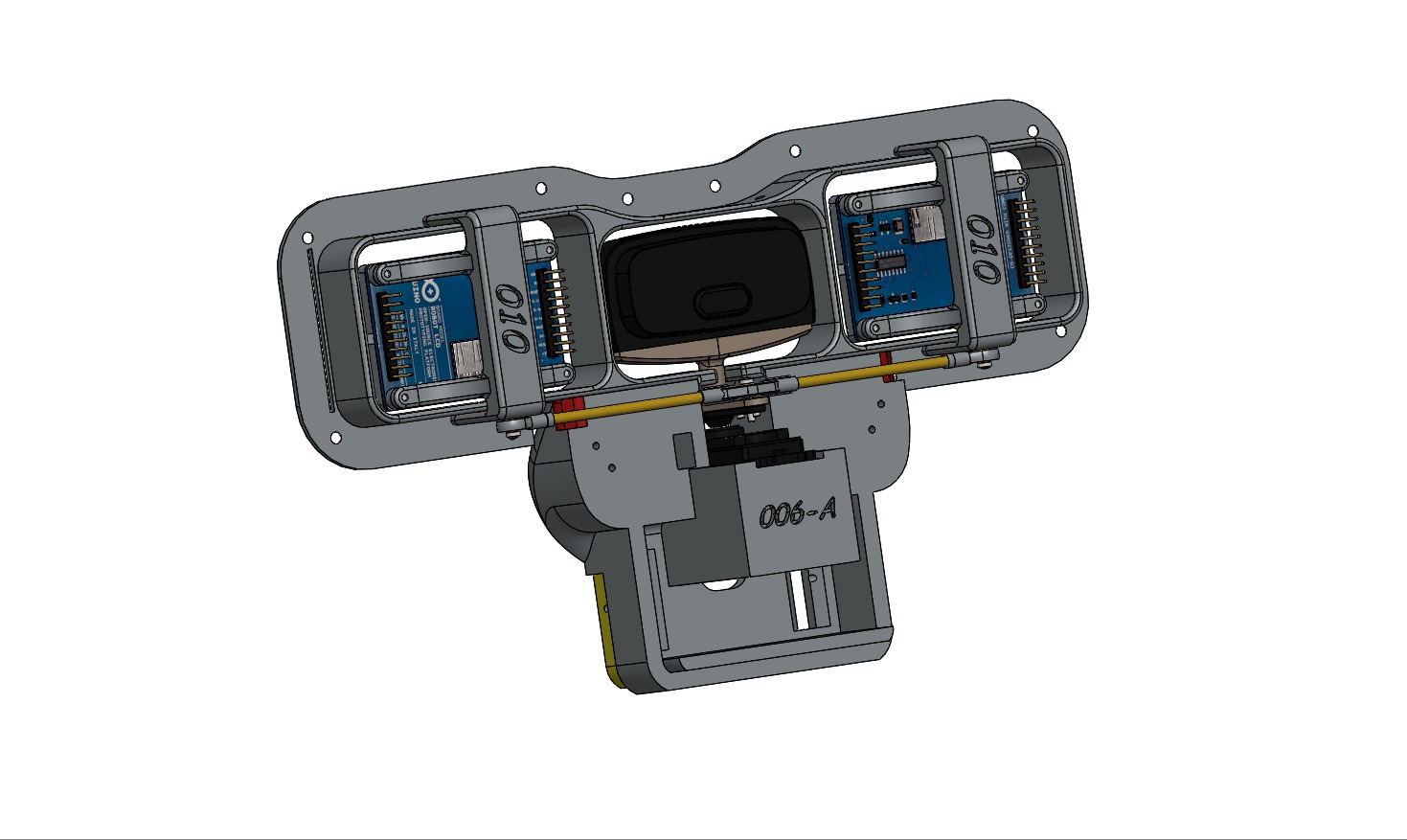
Mise à jour le 08/05/2018 : Dans le souci d’améliorer notre robot Maya, nous avons opéré une modification sur le moteur d’élévation de la tête de Maya. Cette modification a pour but d’augmenter la durabilité du matériel sur le long terme, il va de soi que si vous utilisez notre robot à des fins ludiques ou pédagogiques cette modification n’est absolument pas nécessaire .