
Mise à jour le 13/01/2021 : Un servomoteur est un appareil qui a pour but de reproduire un mouvement. Dans cet article nous traitons de tout ce qui gravite autour de cet appareil comme, leur principe de fonctionnement, le couple, comment le piloter avec un microcontrôleur etc.

Sommaire :
- Les servomoteurs,explication.
- Apparence générale.
- Principe de fonctionnement d’un servomoteur.
- Différentes connectiques et de couleurs pour le raccordement d’un servomoteur.
- Différente technologies de gestion des servomoteurs.
- Trois grands types de servomoteur.
- Coupe d’un servomoteur
- Différents types de construction mécanique pour les pignons.
- Information sur les Splines Servo.
- Hitec fabrique des servos avec 5 splines différentes.
- Futaba fabrique des servos avec 4 splines différentes.
- Comment définir la vitesse d’un servomoteur?
- Comment définir le couple ?
- Article dédié aux servomoteurs à rotation continue
- Article dédié aux servomoteurs équipés d’un retour d’information (Feedback)
- Servomoteur à rétroaction analogique étude de la calibration
- Quelques conseils utiles
- Différents types de raccordement électrique .
- Une alimentation et plusieurs servomoteurs sur une carte Arduino.
- Connexion d’un servomoteur de type Mammoth 38055.
- Connexion de 2 servomoteurs possédant chacun une tension d’alimentation différentes.
- Alimentation de puissance pour servomoteur gourmand .
- Quelques programmes utiles pour vos réalisations sur Arduino
- Positionnement à 90°d’un servomoteur.
- Positionnement du servomoteur et réglage de la vitesse de déplacement.
- Programme de test pour la calibration des servomoteurs à rotation continue.
- Positionnement du servomoteur par potentiomètre.
- Programme d’évaluation d’une rampe d’accélération pour servomoteur à rotation continue.
- Tableau de différents servomoteurs utilisés par RedOhm.
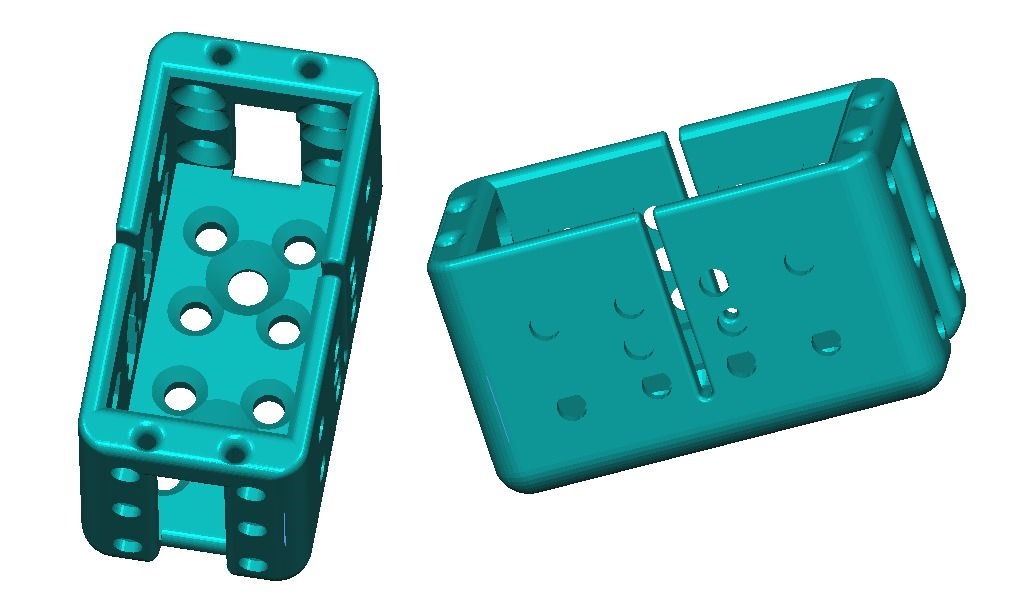
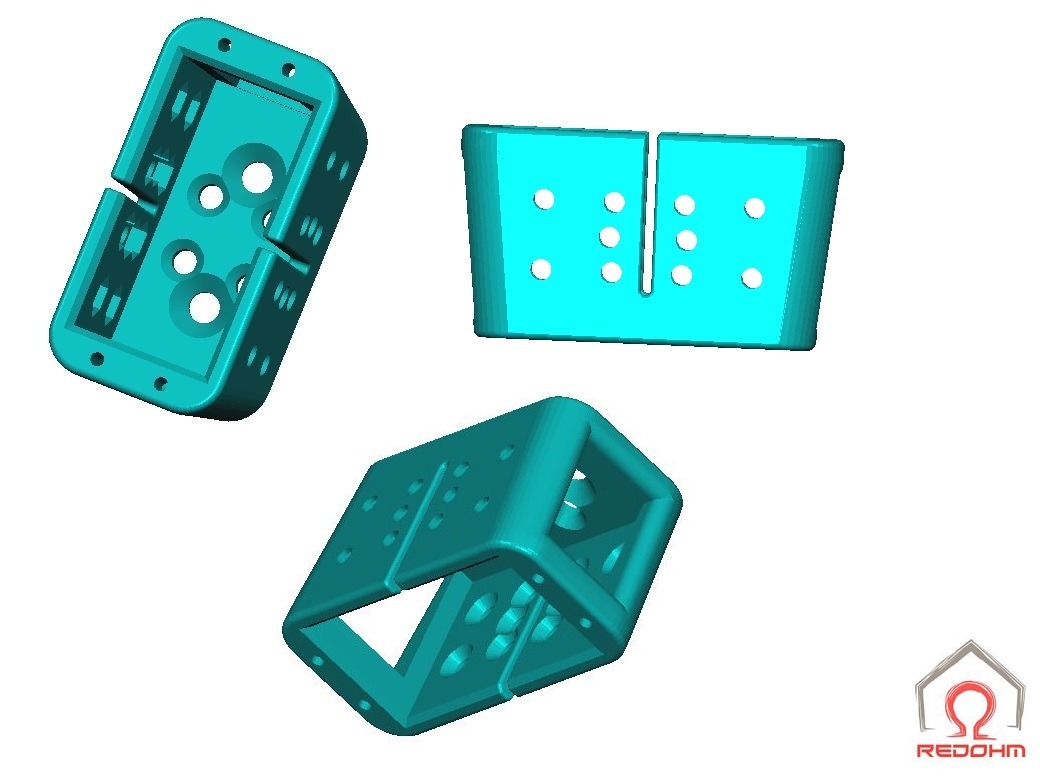
- Voici la liste des servomoteurs utilisés . Les références avec les liens correspondent à des fichiers STL de cage à télécharger ou bien des applications de chez RedOhm .
- Tableau d’aide a la recherche de servomoteur classés par taille.
- Information technique des servomoteurs suivant .
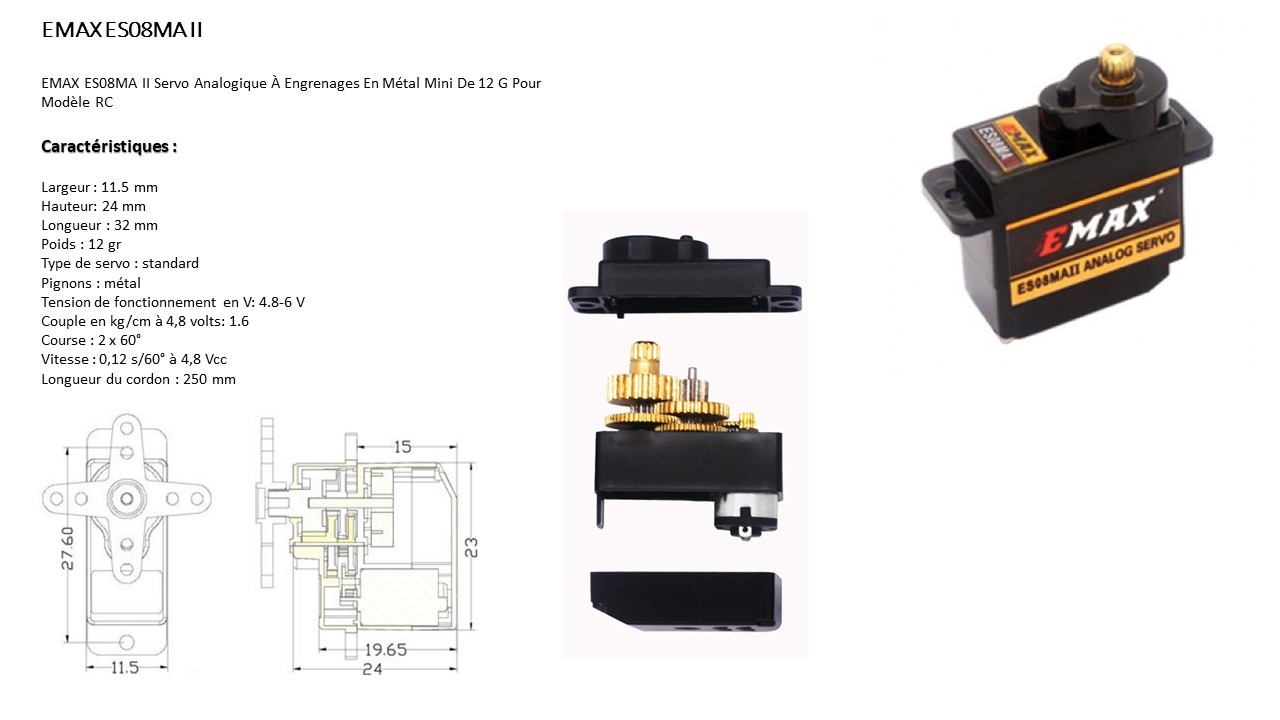
- Emax : ES08MA II -1.6kg/cm
- Adafruit : SM1449 –1.6kg/cm
- Hitec : HSR1425CR – 3.1kg/cm ( rotation continue )
- Hitec : HSB-9380TH – 34kg/cm
- Savox : SW-0241MG – 40kg/cm
- Hitec : D845WP – 50kg/cm
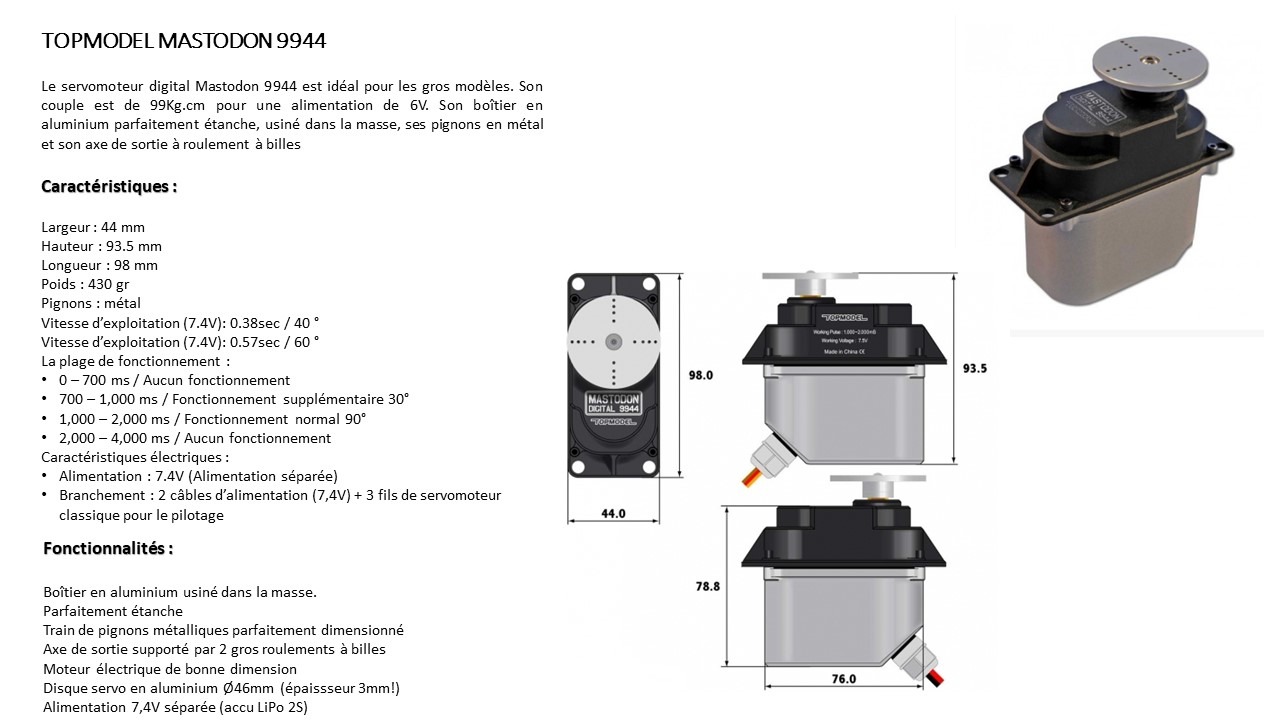
- Topmodel : 9944– 99kg/cm
- Hitec : HSG-1000 SGT – 110kg/cm
- Hitec : HSG1005SGT – 110kg/cm.
- Torxis i00600 – Couple 115 kg/cm
- Topmodel 38055 – 400kg/cm.
- Informations collectées
- A savoir sur l’utilisation des informations de cette article .
- Pour tout probléme.
- Retour au menu tutoriel sur les actionneurs
Les servomoteurs explications. |
On en trouve de toutes les tailles et de toutes les puissances. La plupart du temps la sortie varie entre 0 et 180°.Les servomoteurs contiennent un petit moteur connecté via des engrenages à un axe de sortie. L’axe de sortie qui pilote le bras du servomoteur est aussi connecté à un potentiomètre afin de fournir une rétroaction (feedback en Anglais) de la position à un circuit de contrôle interne.
.
Retour au sommaire
![]()
Apparence générale de quelques servomoteurs |

Servomoteur HS-422 – Puissance : 4.1Kg.cm

Servomoteur Hitec HS755MG- Puissance 11Kg.cm

Servomoteur MASTODON 9944-Puissance 99Kg.cm

Servomoteur MAMMOTH 38055- Puissance 400kg/cm
.
Retour au sommaire
![]()
Principe de fonctionnement d’un servomoteur |

Servomoteur MAMMOTH Alimentation avec 2 fils de puissance plus 3 fils pour le pilotage
La partie électrique d’un servomoteur ne dispose que de 3 fils codés par couleur, pour des servomoteurs type modélisme, et 5 fils pour des servomoteurs de grosse puissance genre Mastodon 9944 et Mammoth 38055 de chez Topmodel, qui permettent d’alimenter le moteur et de lui transmettre des ordres de positions sous forme d’un signal codé en largeur d’impulsion plus communément appelés PWMou RCO. Cela signifie que c’est la durée des impulsions qui détermine l’angle absolu de l’axe de sortie et donc la position du bras de commande du servomoteur. Le signal est répété périodiquement, en général toutes les 20 millisecondes, ce qui permet à l’électronique de contrôler et de corriger continuellement la position angulaire de l’axe de sortie, cette dernière étant mesurée par le potentiomètre.
Lorsque le moteur tourne, l’axe du servomoteur change de position, ce qui modifie la résistance du potentiomètre. Le rôle de l’électronique est de commander le moteur pour que la position de l’axe de sortie soit conforme à la consigne reçue : c’est un asservissement
PWM : La modulation de largeur d’impulsions (MLI ; en anglais : Pulse Width Modulation, soit
PWM)
RCO : Rapport Cyclique d’Ouverture
.
.
.
![]()
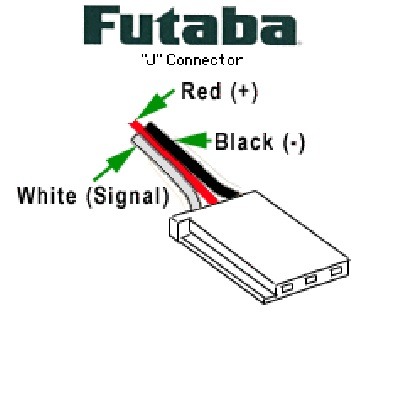
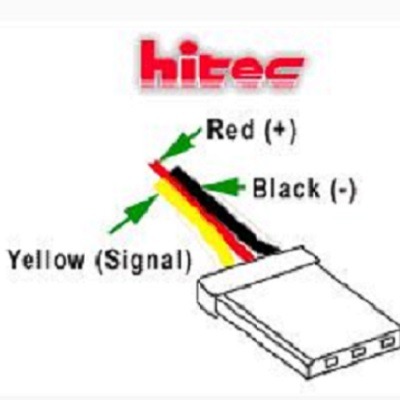
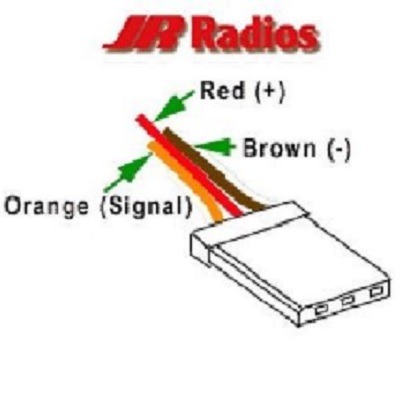
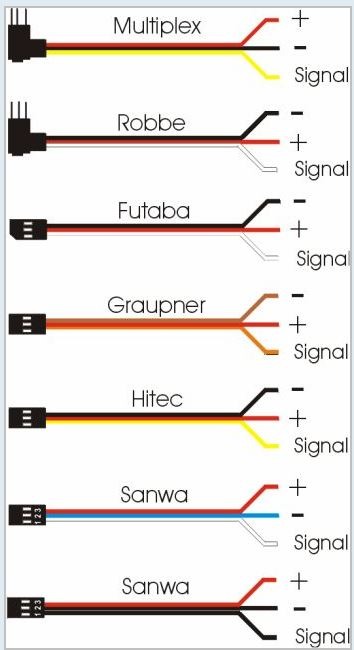
Différentes connectiques et de couleurs pour le raccordement d’un servomoteur. |
.
 |
 |
 |
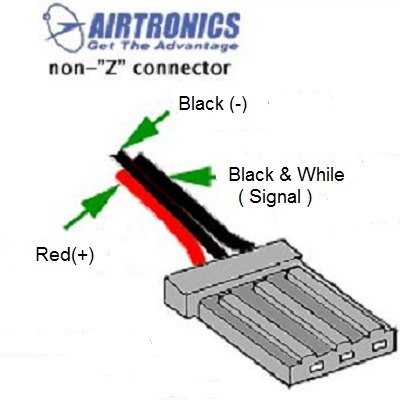 |
Cablage des nappes
.
Retour au sommaire.
![]()
Différente technologie de gestion des servomoteurs |
- Analogique.
- Numérique :La commande est identique, tout se passe dans le boitier du servo. Un servomoteur analogique est asservis avec un circuit analogique d’une fréquence faible, alors qu’un servo numérique est asservis par un microcontrôleur avec une fréquence élevée. Un système numérique a donc un temps de réponse plus rapide et une plus grande précision mais une consommation électrique plus importante .
.
![]()
3 grands types de servomoteur |
Servomoteur standard . Déplacement de 0° A 180°.
.
Servomoteur a rotation continu. A la différence du servomoteur standard, le servomoteur à rotation continue tourne comme un moto-réducteur à courant continu : c’est l’impulsion de commande qui définit le sens et la vitesse de rotation.
Servomoteur analogique avec signal de feedback. Un signal analogique dépendant de la position du servomoteur permet de connaître la position réelle de celui-ci.Ce signal permet d’améliorer la précision et la stabilité.
Applications: robotique, apprentissage de mouvement, enregistrement de positions, etc. Le signal de retour analogique est disponible sur un quatrième fil.
Pourquoi utiliser ce type de servomoteur ?
Le problème avec le contrôle d’un servomoteur RC standard à partir d’un microcontrôleur est qu’il s’agit d’une «boucle fermée» dans le boîtier du servomoteur, mais d’une «boucle ouverte» par rapport à votre microcontrôleur (carte Arduino par exemple). Vous pouvez indiquer au servo la position souhaitée de l’arbre, mais vous n’avez aucun moyen de confirmer si cela se produit réellement.
Les servomoteurs à retour de position vous permettent de fermer cette boucle externe en transmettant également le signal de retour au microcontrôleur!
Les servos RC font généralement ce qu’on leur dit de faire, mais dans de nombreux cas, un servomoteur peut ne pas le faire.
Comme par exemple :
- Taille du moteur insuffisante
- Alimentation électrique insuffisante
- Interférence physique
- Interférence électrique
- Défaut de connexion
- Ou une recopie d’un mouvement fait à la main sur ce même servomoteur
- Etc …..
Dans ces cas, les informations venant du retour de position pourraient vous alerter sur un éventuel problème.
Mais s’il faut aussi intégrer que même si le servo est correctement dimensionné et fonctionne normalement, il faut encore un certain temps pour répondre à une commande de position. Dans de nombreuses applications, il est tout aussi important de savoir quand la position est atteinte.
Sans retour d’information, la plupart des programmes de servocommande doivent émettre des hypothèses sur la durée d’un mouvement particulier. L’ajout de retards temporels fixes au code du servo convient aux applications simples, mais peut entraîner des performances lentes et / ou saccadées lorsque vous essayez de coordonner plusieurs mouvements d’asservissement ou des interactions entre des servos et d’autres capteurs ou actionneurs.
Ou pire: si les délais ne sont pas assez longs, vos servos risquent de ne pas atteindre la position souhaitée à temps. Cela peut provoquer des dysfonctionnements et / ou endommager votre projet. Les problèmes de minutage sont un gros problème dans les projets alimentés par batterie, car les moteurs fonctionneront plus lentement à mesure que la batterie faiblira.
Le signal de retour brut est une tension. Afin de convertir cette tension en une position significative, nous devons l’étalonner sur le servo. En lisant les valeurs de retour à deux positions connues, nous pouvons interpoler les valeurs de retour attendues pour chaque position intermédiaire.
Voilà donc une utilité de ce type de servomoteur
.
Coupe d’un servomoteur |
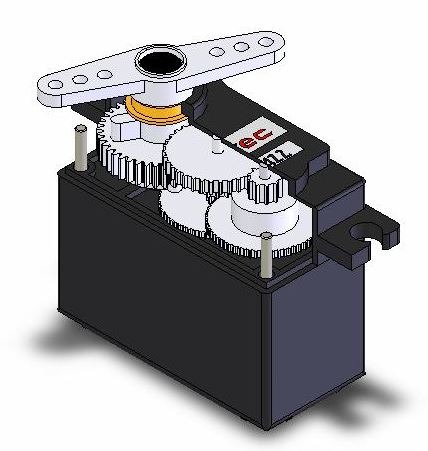
Différents types de construction mécanique pour les pignons |
.
Le nylon est prévu pour les applications standard et offre une excellente résistance à l’usure et dans le temps
Karbonite est 5 fois plus fortes que le nylon et offre une meilleure résistance à l’usure (la Karbonite : matériau composite plastique renforcé utilisé dans les servomoteurs Hitec.
Le métal est parfait pour les applications difficiles et est 16 fois plus fort que le nylon
Le titane n’offre pratiquement pas d’usure après des années d’utilisation et 48 fois plus fort que les engrenages en nylon.
.
![]()
Information sur les Splines Servo |
Hitec fabrique des servos avec 5 splines différentes.
Spline sub-micro A1 (15 dents)
HS-50, HS-55
B1 Mini Spline (25 dents)
HS-125MG, HS-56HB, HS-65HB ….. beaucoup d’autres mini servos.
Spline standard C1 (24 dents)
N’importe quel servo Hitec de taille standard. Même les servos HS-755HB, HS-755MG, HS-765HB et HS-785HB utilisent cette spline de taille standard.
H25T Servomoteurs Hitec standard Spline (25 dents)
HS-83XXTH et HSB-93XXTH.
REMARQUE: cette spline est identique à la spline standard Futaba 25T (3F).
Servos D1 Spline Heavy Duty (15 dents) HS-805BB et HS-815BB
Futaba fabrique des servos avec 4 splines différentes.
À l’heure actuelle (31/12/2018), Futaba fabrique des servos à 4 cannelures différentes. Lors du choix des composants à attacher à votre servo, il est important de connaître la taille de spline utilisée par votre servo.
Servos Futaba 1F Spline (15 dents) tels que les modèles S3111, S3114 et S3154.
Spline 2F (21 dents) Les
micro-servos tels que S3153, S3107, S117 et similaires ont la spline de taille 2F.
Cannelure standard 3F (25 dents)
La plupart des servos Futaba de taille standard possèdent une cannelure 3F.
Cannelure 4F (25 dents)
Cette cannelure se trouve sur la plupart des servos à l’échelle Giant comme les modèles S3306 et S9154.
.
.
![]()
Comment définir le vitesse d’un servomoteur |
La vitesse d’un Servomoteur est indiquée en secondes , tout comme pour une voiture pour la référence de vitesse est de 0 à 100 km/h , un servomoteur a une vitesse exprimée de 0 à 60 degrés /s.
.
Retour au sommaire![]()
Comment définir le couple d’un servomoteur |
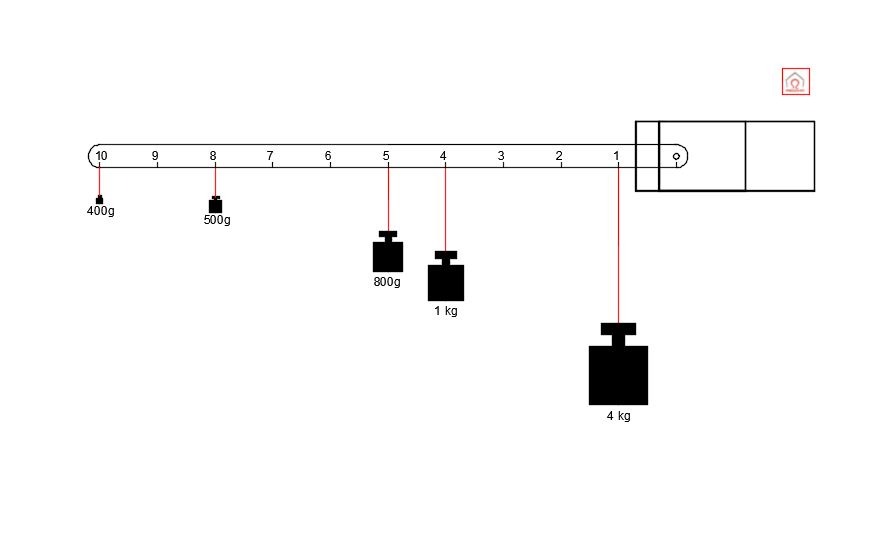
Le couple d’un servomoteur a pour unité le kg.cm (kilogramme-centimètre )
Rappel : La formule du couple est la suivante : C= F*r la relation entre le couple C du servomoteur ( en kilogramme mètre ), F la force exercée sur le bras du servomoteur ( en kilogramme ) et r la distance ( en mètre ) à laquelle s’exerce cette force par rapport à l’axe de rotation du servomoteur
Le servomoteur x peut fournir un couple de 4kg.cm .Ce même servomoteur pourra soulever une charge de 4kg si la tige fait 1 cm en revanche pour une tige de 5cm il ne pourra soulever une masse de 800g et enfin pour une tige de 10cm la charge sera de 400g.
Explication en dessin ( c’est mieux qu’un long discours ) 😉
Cliquez dessus pour agrandir la photo
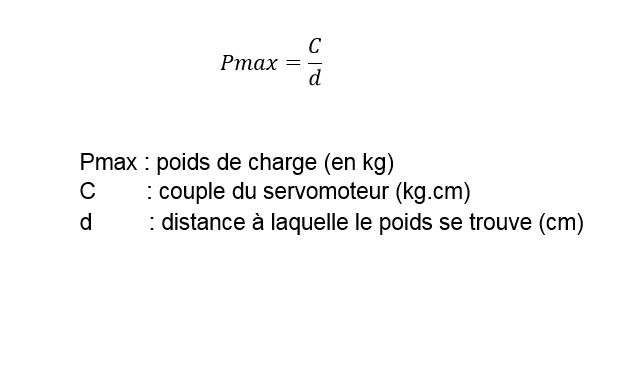
Voici la formule pour définir le poids maximum à une distance donnée
![]()
Quelques conseils utiles |
Ne surchargez pas vos servomoteurs
Lors de la surcharge d’un servomoteur , la consommation de courant de celui-ci augmente énormément , si cette état se prolonge trop longtemps cela risque de détruire votre servomoteur.
Sélectionner le servomoteur en fonction de l’application .
N’hésitez pas de le surdimensionner.
Veillez à obtenir un déplacement sans contrainte des tringles
Vérifiez régulièrement que les tringles glissent sans problèmes dans les gaines ( en les décrochant du servomoteur ) .Les contraintes induisent une consommation de courant plus grande et réduisent sensiblement la précision du positionnement .
Les servomoteurs de doivent pas bloquer en permanence .
Évitez que le servomoteurs doit forcer en permanence .
Protéger vos servomoteurs contre les vibrations.
Assurez une protection au servomoteur par des douilles en caoutchouc.
Retour au sommaire
![]()
Différents types de raccordement électrique pour les servomoteurs |
Une alimentation et plusieurs servomoteurs sur une carte Arduino
Ne pas oublier l’alimentation de l’arduino
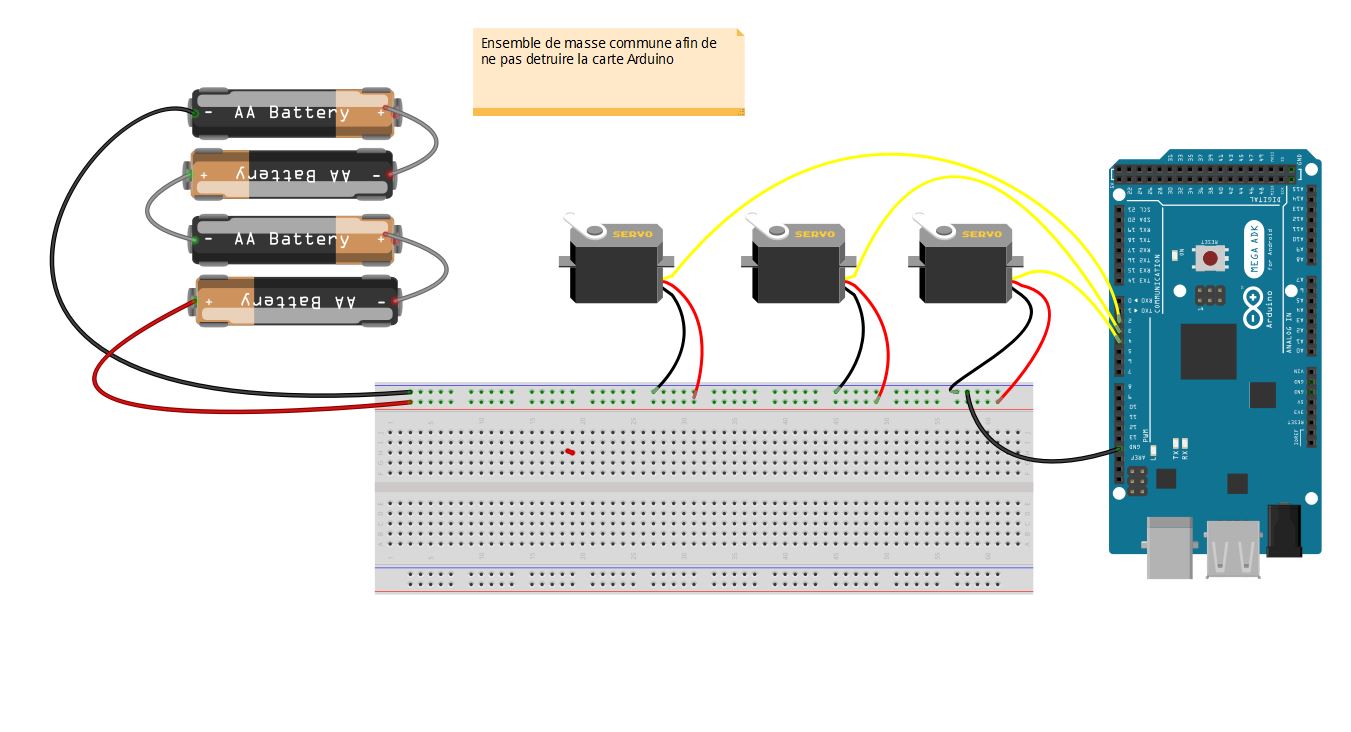
Cliquez dessus pour agrandir l’image
.
Retour au sommaire
.
Connexion d’un servomoteur Mammoth 38055 alimentation 12V
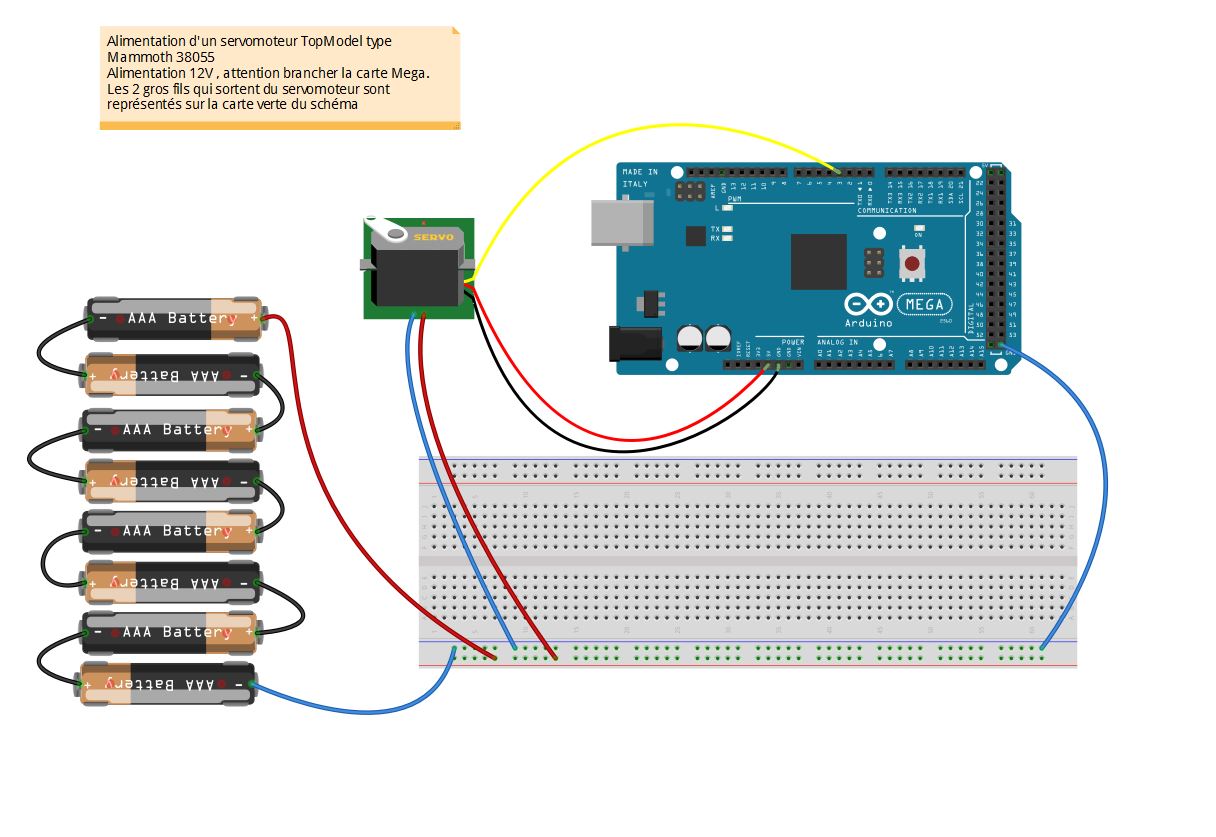
Servomoteur Mammoth 38055 Cliquez dessus pour agrandir l’image
Retour au sommaire
***
Connexion de 2 servomoteurs possédant chacun une tension d’alimentation différentes
A savoir: Pour l’alimentation du servomoteur Mastodon 9944 , on passe par un régulateur 7805 type MC7805CK 3A avec l’adjonction d’une diode Zener de 2.4V dans la ligne de la masse qui a pour but d’augmenter la tension de sortie de la valeur de la tension de Zener .
SOIT : 5V régulateur + 2,4V Zener = 7.4V
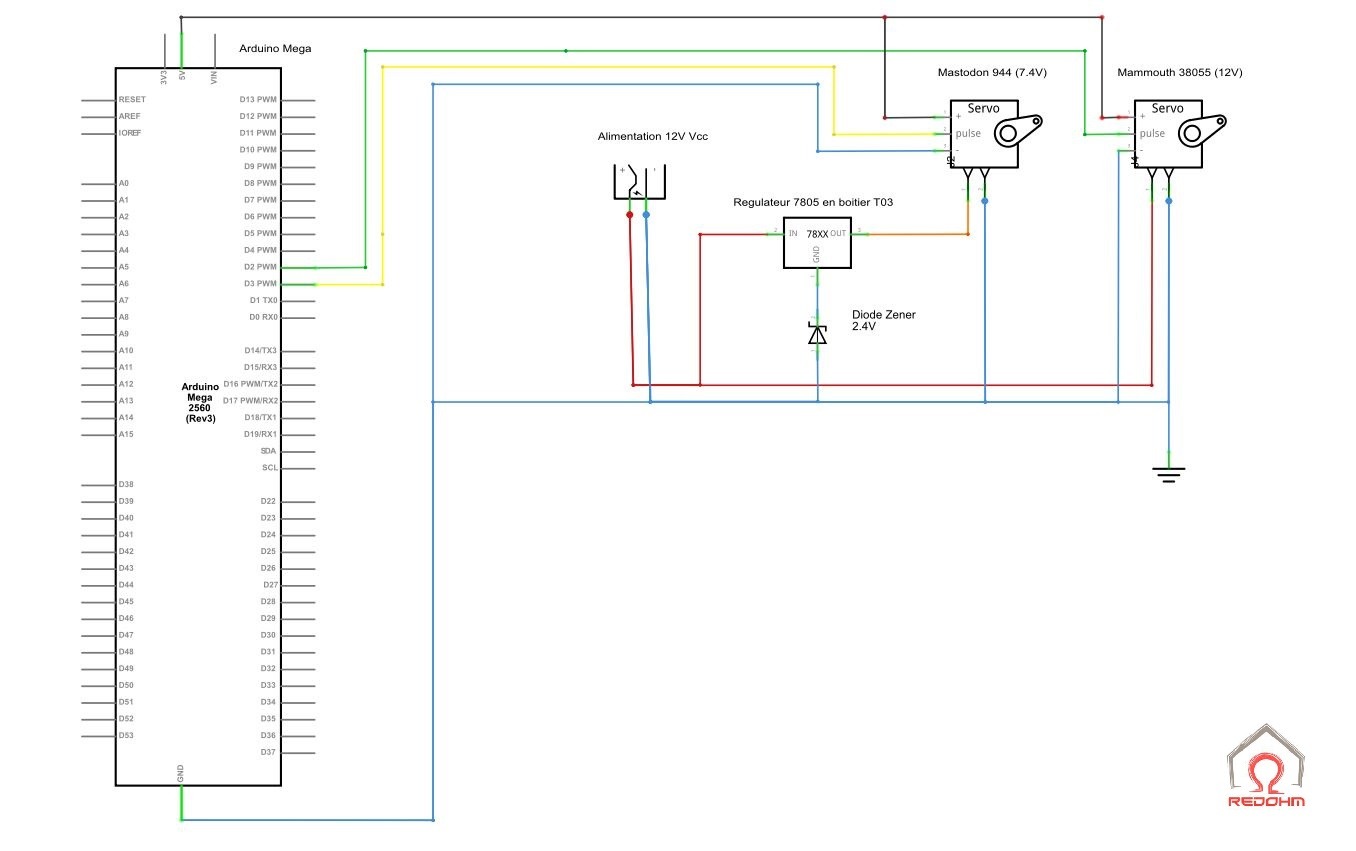
RedOhm : Cliquez dessus pour agrandir l’image
.
Retour au sommaire
***
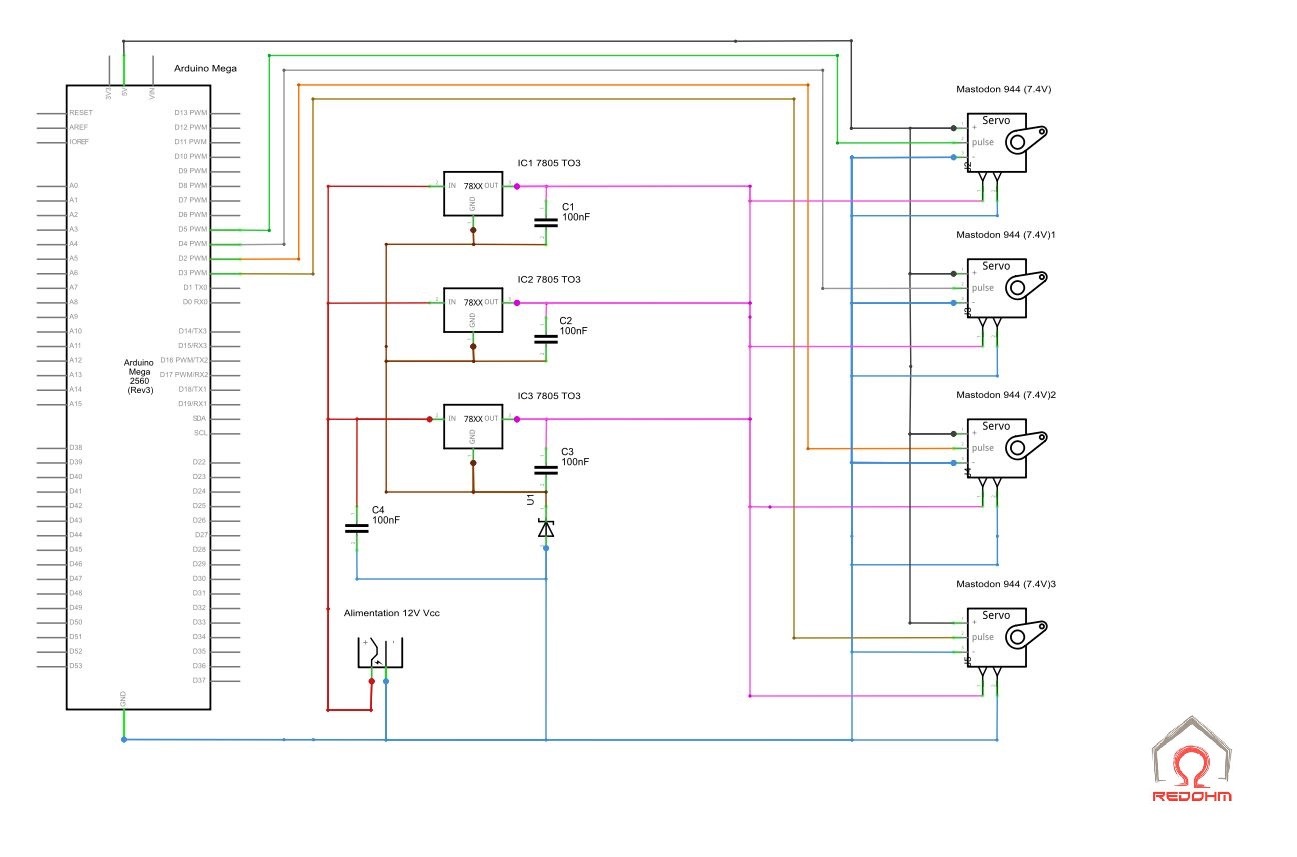
Alimentation de puissance pour servomoteur gourmand
RedOhm : Cliquez dessus pour agrandir l’image
Alimentation de puissance pour servomoteur Mastodon en 7,4V
Le montage se compose de deux particularités, la première étant l’asservissement de plusieurs régulateurs entre eux, la seconde étant d’augmenter la tension de sortie du montage pour arriver à la tension désirée de 7,4V
Pourquoi mettre des régulateurs en parallèles ?
Simplement pour augmenter le courant de sortie.
Comment calculer notre courant de sortie de notre montage ?
Il faut d’abord s’assurer du courant maximum des régulateurs en question (toujours prendre la même référence de régulateur pour un montage donné). Pour notre montage, nos régulateurs possèdent la référence suivante :MC7805CK . Le constructeur nous indique 3A maximum
Donc I_sortie = Nombre_de_régulateur * I_max soit 9A
A quoi servent les condensateurs aux bornes des régulateurs MC7805CK ?
Ce montage a tendance à entrer en oscillation. Il est très important que les condensateurs de découplage soit soudés le plus près possible de la sortie du régulateur et du retour à la masse de chaque régulateur.
Le courant est-il identique dans chaque régulateur ?
Il n’y a aucune importance que le courant de sortie se repartisse de façon identique dans chaque régulateur. Chaque régulateur va s’autoréguler.
Comment augmenter la tension de sortie d’un régulateur 5V pour obtenir du 7.4V ?
Il suffit simplement de l’adjonction d’une diode Zener de 2.4V dans la ligne de la masse qui a pour but d’augmenter la tension de sortie de la valeur de la tension de Zener
.
Retour au sommaire
Quelques programmes utiles pour vos réalisations sur Arduino |
.
Positionnement a 90° du servomoteur
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 |
// /* * RedOhm * * * Positionne un servomoteur à son centre * donc à 90° * * Le 27/04/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // le bouton est connecté à la broche 2 de la carte Arduino const int bouton=2; // Variable qui enregistre l'état du bouton int etatdubouton; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { //le bouton est une entrée pinMode(bouton,INPUT); //on initialise l'état du bouton comme "relaché" etatdubouton=LOW; } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de l'etat du bouton etatdubouton=digitalRead(bouton); //test si le bouton a un niveau logique HAUT if (etatdubouton == HIGH) { // associe le servomoteur a la broche 3 monservo.attach(3); // Positionne mon servomteur a 90 monservo.write(90); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } else { // Dissocie la variable monservo de sa broche monservo.detach(); } } |
Retour au sommaire
.
Positionnement du servomoteur à l’aide d’un potentiomètre
Ce programme vous permet de positionner le servomoteur en fonction de la position du potentiomètre branché sur votre carte Arduino
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 |
// /* * RedOhm * * * Positionne un servomoteur a l'aide * d'un potentiometre * * Le 27/04/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // broche sur lequel est branche le potentiometre int brochepotar_de_position=0; // variable contenant la valeur de la potentiometre int valeur_potar_position; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // associe le servomoteur a la broche 3 monservo.attach(3); } void loop() { // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position=analogRead( brochepotar_de_position); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position=map(valeur_potar_position,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle monservo.write(valeur_potar_position); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
.
Retour au sommaire.
Positionnement du servomoteur à l’aide d’un potentiomètre et réglage de la vitesse
Ce programme vous permet de positionner le servomoteur en fonction de la position du potentiomètre et de régler la vitesse de déplacement de ce même servomoteur .
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 |
// /* * RedOhm * * * Positionne un servomoteur a l'aide * d'un potentiometre et reglage de la vitesse * de positionnement * V 1.00 * * Le 29/04/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // broche sur lequel est branche le potentiometre de // positionnement borne 0 int brochepotar_de_position=0; // variable contenant la valeur du potentiometre de // positionnement int valeur_potar_position; // broche sur lequel est branche le potentiometre de // reglage de vitesse borne 2 int brochepotar_reglage_de_vitesse=2; // variable contenant la valeur de la potentiometre de // reglage de vitesse int valeur_potar_de_reglage_vitesse; // variable de lecture de l'angle du servo int valeur_de_angle; // Variable increment vitesse int inc_vitesse=1; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // associe le servomoteur a la broche 3 monservo.attach(3); } void loop() { // ***************************************************************** // reglage vitesse servomoteur // lecture de la valeur du potentiomètre de vitesse (valeur entre 0 et 1023) // et stockage dans sa variable valeur_potar_de_reglage_vitesse=analogRead(brochepotar_reglage_de_vitesse); // mise a l'échelle (valeur entre 0 et 200) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre // fourchette. Ainsi, une valeur basse source sera étalonnée en une // valeur basse de destination // cette valeur nous servira de base de temps valeur_potar_de_reglage_vitesse =map(valeur_potar_de_reglage_vitesse,0,1023,0,200); // fin de reglage vitesse servomoteur // ******************************************************************** //********************************************************************* // lecture de l'angle actuel // Retourne la valeur de l'angle du servomoteur // et stockage dans sa variable valeur_de_angle= monservo.read(); // fin lecture de l'angle actuel //********************************************************************* // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position=analogRead( brochepotar_de_position); // mise a l'échelle (valeur entre 0 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre // fourchette.Ainsi, une valeur basse source sera étalonnée en une // valeur basse de destination valeur_potar_position=map(valeur_potar_position,0,1023,5,180); if (valeur_de_angle<valeur_potar_position) { valeur_de_angle+=inc_vitesse; delay( valeur_potar_de_reglage_vitesse); monservo.write(valeur_de_angle); } else if (valeur_de_angle>valeur_potar_position) { valeur_de_angle-=inc_vitesse; delay( valeur_potar_de_reglage_vitesse); monservo.write(valeur_de_angle); } else if (valeur_de_angle=valeur_potar_position) { monservo.write(valeur_de_angle); } } |
| Retour au sommaire |
**
Programme de test pour la calibration des servomoteurs à rotation continue
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 |
/* * * * RedOhm * * Programme de test pour la calibration des servomoteurs à * rotation continue * * * Le 01/09/2018 * H.Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Variable qui enregistre l'état du signal pour activer le servomoteur // par defaut la valeur est fixée à 1500 ce qui correspond en general à l'arret // du servomoteur ( pour un servomoteur à rotation continue ) int temps = 1500; // Variable pour le comptage en vue du rafraichissement de l'ecran int compteur=0; // Crée un objet de type "Servo", nommé -> monservo Servo monServo; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { Serial.begin(9600); Serial.println("*====================================*"); Serial.println("* *"); Serial.println("* Programme de test pour servomoteur *"); Serial.println("* *"); Serial.println("* à rotation continu *"); Serial.println("*====================================="); Serial.println("* *"); Serial.print("* valeur de deplacement par defaut -> "); Serial.println(temps); Serial.println("* w augmente la valeur par defaut de 10 "); Serial.println("* x diminue la valeur par defaut de 10 "); Serial.println("* a -> arret du servomoteur / v -> marche avant / r -> marche arriere "); Serial.println(" "); // associe la variable monservo de sa broche en autre la numero 3 monServo.attach(3); // Écrit une valeur en microsecondes (uS) sur le servo, // la valeur par defaut etant 1500 ce qui correspond en // general à l'arret monServo.writeMicroseconds(temps); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { //Obtenez le nombre d'octets (caractères) disponibles pour //la lecture du port série. //dans notre cas soit la lettre w ou x ou a pour arret //ou r pour arriere ou v pour avant if(Serial.available()) { char commande = Serial.read(); // on modifie la vitesse de 10 microsecondes // touche w et validation avec la touche entrée augmenter la vitesse // vers l'avant ou on diminue si on est en arriere if(commande == 'w') temps += 10; else if(commande == 'x') // on modifie la vitesse de 10 microsecondes // touche x et validation avec la touche entrée augmenter la vitesse // vers l'arriere ou on diminue si on est en avant temps -= 10; // touche a et validation avec la touche entrée pour arret // du servo ( pour les servomoteurs rotation 360° else if (commande == 'a') { temps = 1500; Serial.println("Demande d'arret"); } // touche v et validation avec la touche entrée pour avant // du servo ( pour les servomoteurs rotation 360° else if (commande == 'v') temps = 1600; // touche v et validation avec la touche entrée pour arriere // du servo ( pour les servomoteurs rotation 360° else if (commande == 'r') temps = 1400; // comptage du nombre de passage pour le rappel des commandes // sur l'ecran compteur=compteur+1; //x > y (x est supérieur à y) //si le resultat et vrais alors on rappelle les commandes de //pilotage du servomoteur if(compteur > 28) { Serial.println("*====================================*"); Serial.println("* *"); Serial.println("* Programme de test pour servomoteur *"); Serial.println("* *"); Serial.println("* à rotation continu *"); Serial.println("*====================================="); Serial.println("* *"); Serial.print("* valeur de deplacement par defaut -> "); Serial.println(temps); Serial.println("* w augmente la valeur par defaut de 10 "); Serial.println("* x diminue la valeur par defaut de 10 "); Serial.println("* a -> arret du servomoteur / v -> marche avant / r -> marche arriere "); Serial.println(" "); compteur = 0; } // x <= y (x est inférieur ou égal à y) // si le resultat et vrais alors on ne fait rien else if (compteur <=28) { } // envoie de la valeur au servomoteur pour monServo.writeMicroseconds(temps); // retour de la valeur envoyée au servomoteur sur l'ecran du // pc Serial.print("Valeur de la vitesse de deplacement -> "); Serial.println(temps, DEC); } } |
.
Retour au sommaireTableau de différents servomoteur utilisés par RedOhm
S3217 |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| Topmodel | S3217 | 4.2kg.cm | 4.8 à 6Vcc | 0.14 sec/60° | 36gr |
 Servomoteur de chez Topmodel équipé de pignon en nylon Servomoteur de chez Topmodel équipé de pignon en nylonDimension 38.3*18.6*34.6mm Vitesse (s/°) : 0.14 sec/60° |
|||||
| Retour au sommaire | |||||
HS325HD |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | HS 325 HD | 3kg.cm (4,8V) | 4.8 à 6Vcc | 0,19″/60° – 0,12″/40° | 43gr |
 |
Le HS-325HB établit un nouveau standard pour les servos de sport à roulements à billes, en incorporant le nouveau train de pignons révolutionnaire « Karbonite ». Les pignons Karbonite sont quatre fois plus résistants que les pignons standard en nylon blanc et même après des centaines de milliers de cycles, ils ne présentent aucun signe d’usure. Dimensions: 40 x 20 x 37 mm Prix moyen :18 A 22€ Fournisseur : Topmodel |
||||
| Retour au sommaire : | |||||
HS 422 |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | HS 422 | 4.7kg.cm | 4.8 à 6Vcc | 2*45° | 46gr |
|
Servo type : Analogique |
|||||
|
Application de ce type de servo chez RedOhm : Mouvement des yeux de Sentinel
|
|||||
| Retour au sommaire : | |||||


***
SR-402P |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| SR-402P | 8.2g.cm | 6 à 7.4Vcc | 180° | 46gr | |
| Dimensions: 40 x 43 x 21 mm Vitesse: 0,20 s/60° 6 V
***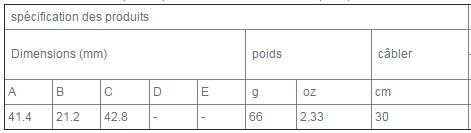 sr-402p spécification du servomoteur 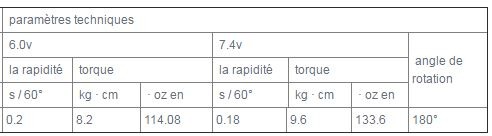 sr-402p paramétrés technique du servomoteur |
|||||
 SR-402
|
 SR-402P |
||||
| Prix moyen : 14 à 19 € ( info du 26/10/2016 ) Fournisseur :banggood.com , La page banggood SR-402P |
|||||
| Retour au sommaire : | |||||
HS 645 MG |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | HS 645 MG | 9.6kg.cm | 4.8 à 6Vcc | 2*45° | 54gr |
 Servomoteur type : Analogique Servomoteur type : AnalogiqueDimensions: 41 x 20 x 36 mm Température de Fonctionnement: -20 à +60 degrés C Vitesse d’exploitation (4.8V): 0.24sec / 60 ° Vitesse d’exploitation (6.0V): 0.20sec / 60 ° Largeur de bande morte: 8 micro S Type de moteur: 3 pôles de ferrite Fournisseur : Gotronic |
|||||
|
Application de ce type de servo chez RedOhm : Réalisation de la main gauche de Inmoov 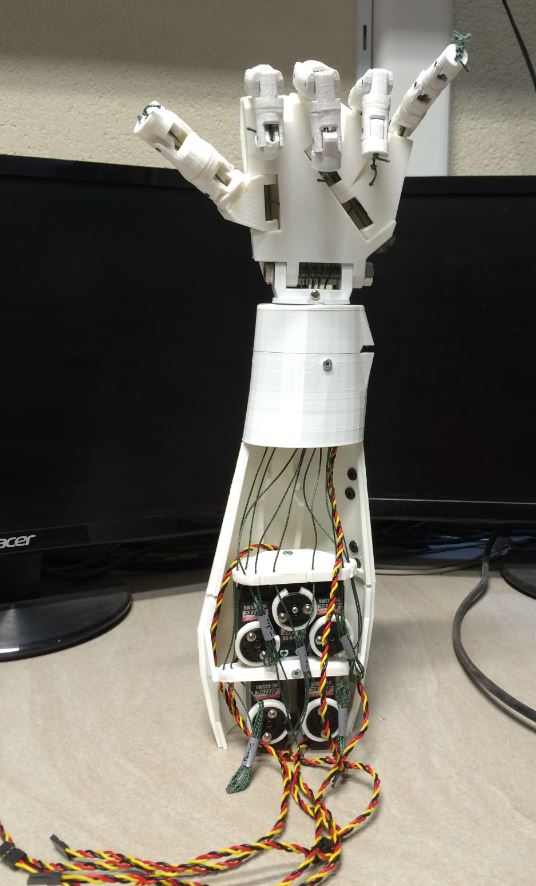 Avant bras projet INMOOV
|
|||||
 Robot Maya – RedOhm
Application de ce type de servo chez RedOhm : Projet robot Maya |
|||||
Temps d’impression pour un remplissage de 60% : –
Temps d’impression remplissage de 60% : |
|||||
| Retour au sommaire |
HS 755 MG |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | HS 755 MG | 11kg.cm | 4.8 à 6Vcc | 2*40° | 110gr |
 Servomoteur type : Analogique Servomoteur Hitec équipé de pignons en Metal Dimensions: 59 x 29 x 50 mm Vitesse: 0,28 s/60° Température de Fonctionnement: -20 à +60 degrés C Vitesse d’exploitation (4.8V): 0.28sec / 60 ° Vitesse d’exploitation (6.0V): 0.23sec / 60 ° Prix moyen : 42 à 45€
A savoir: Ce servomoteur remplace le populaire HS-705MG et offre un couple plus puissant afin d’améliorer ces performances.Les engrenages en métal sont huit fois plus fort que les engrenages Karbonite dans le HS-755HB. Caractéristiques des signaux : |
|||||
| Liens externes : ⇒ Gotronic |
|||||
| Retour au sommaire |
HS 805 BB |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | HS 805 BB | 24kg.cm | 4.8 à 6Vcc | 2*70° | 152gr |
 Servo type : Analogique Servo type : AnalogiqueServo Hitec équipé de pignons en Nylon Dimensions: 66 x 30 x 57 mm Température de Fonctionnement: -20 à +60 degrés C Vitesse d’exploitation (4.8V): 0.19sec / 60 ° Vitesse d’exploitation (6.0V): 0.14sec / 60 ° Puissance : 19.6 kg/cm sous 4.8V Vitesse : 0.19 s/60°sous 4.8V ou 0.14 s/60°sous 6V
–A savoir :
|
|||||
| Liens externes : ⇒ Gotronic |
|||||
| Retour au sommaire |
Hitec HSB-9380TH |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| HITEC | 34kg.cm | 6 à 7.4Vcc | 0.14 s (60°) | 68gr | |
 Servomoteur Hitec HSB-9380TH
Caractéristiques –
A savoir :
Possibilité de personnaliser le servo :  Interface de Programmation pour Moteur Hitec Programmable DPC-11 |
|||||
| Liens externes : ⇒ Conrad |
|||||
| Retour au sommaire |
TOPMODEL MAMMOTH 38055 |
|||||
| Constructeur | Réf | Couple | Tension | Angle ou vitesse | Poids |
| TOPMODEL | MAMMOTH 38055 | 400kg.cm | 12Vcc | 795gr | |
|
Servomoteur Topmodel équipé de pignons en Métal
|
|||||
|
Application de ce type de servo chez RedOhm :Album complet de la Version 2.01
|
|||||
| Liens externes : ⇒ France Robotique |
|||||

| Retour au sommaire | Aller à la rubrique » la foire aux questions « |
Tableau d’aide a la recherche de servomoteur classés par taille |
–
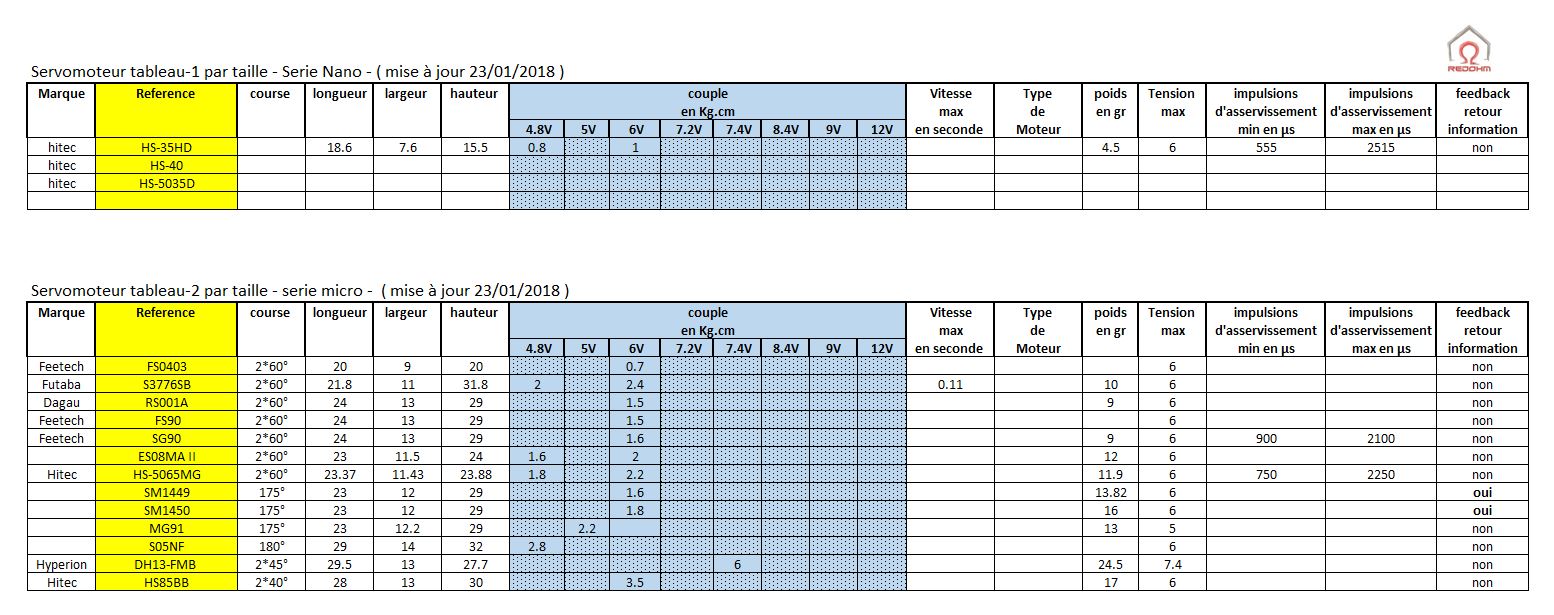
Tableau-1 & 2 d’aide à la recherche de servomoteur .mise à jour 23/01/2018
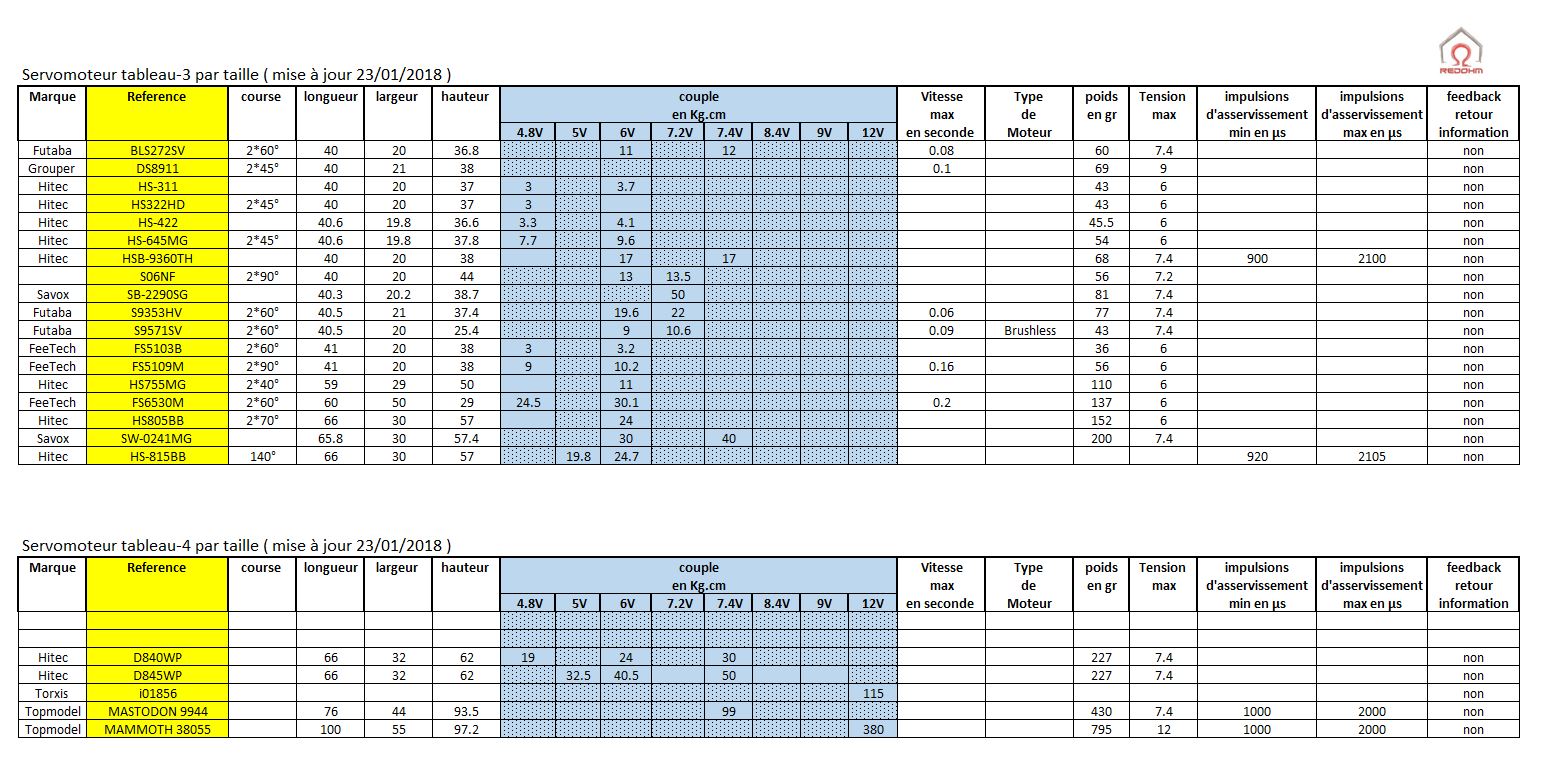
Tableau- 3 & 4 d’aide à la recherche de servomoteur .mise à jour 23/01/2018
.
Retour au sommaire
Information technique des servomoteurs
|
.
New rubrique en cours de réalisation 31/12/2018 :
Cliquez sur l’image de votre choix
.
| Emax ES08MA II Couple 1.6 kg/cm |
Application de ce type de servo chez RedOhm | |
 ES08MA II |
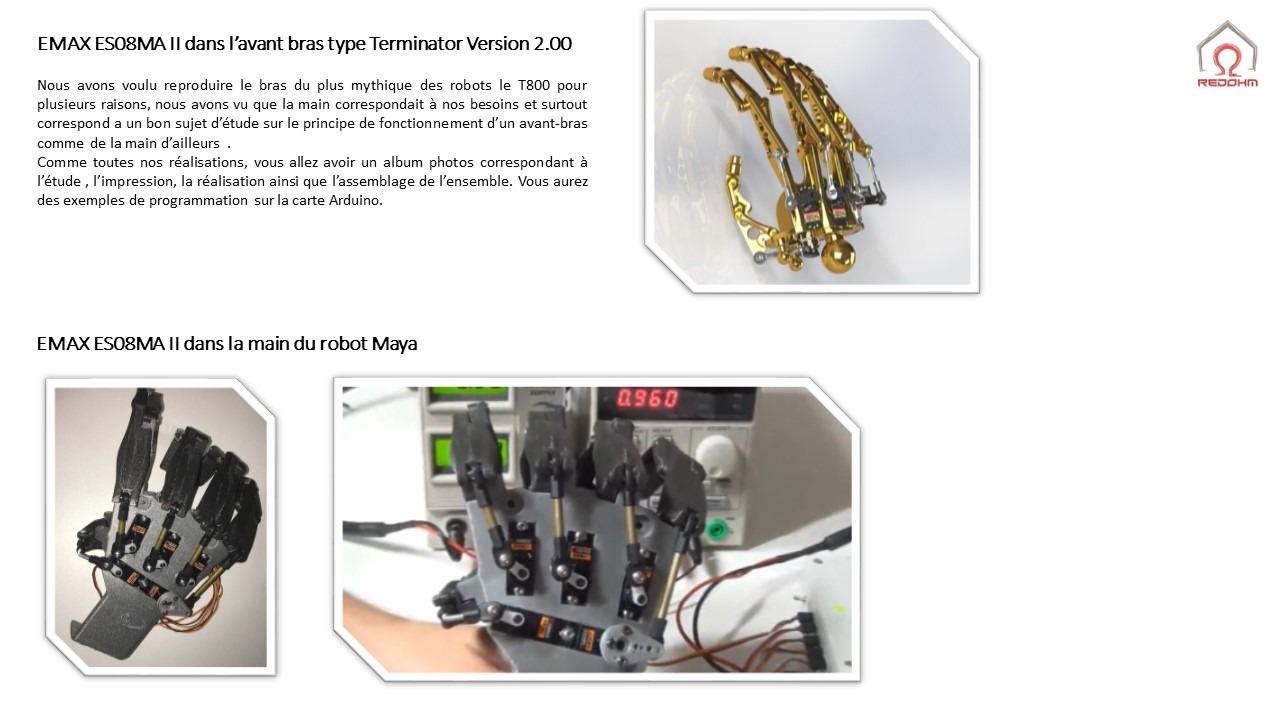 ES08MA II – RedOhm |
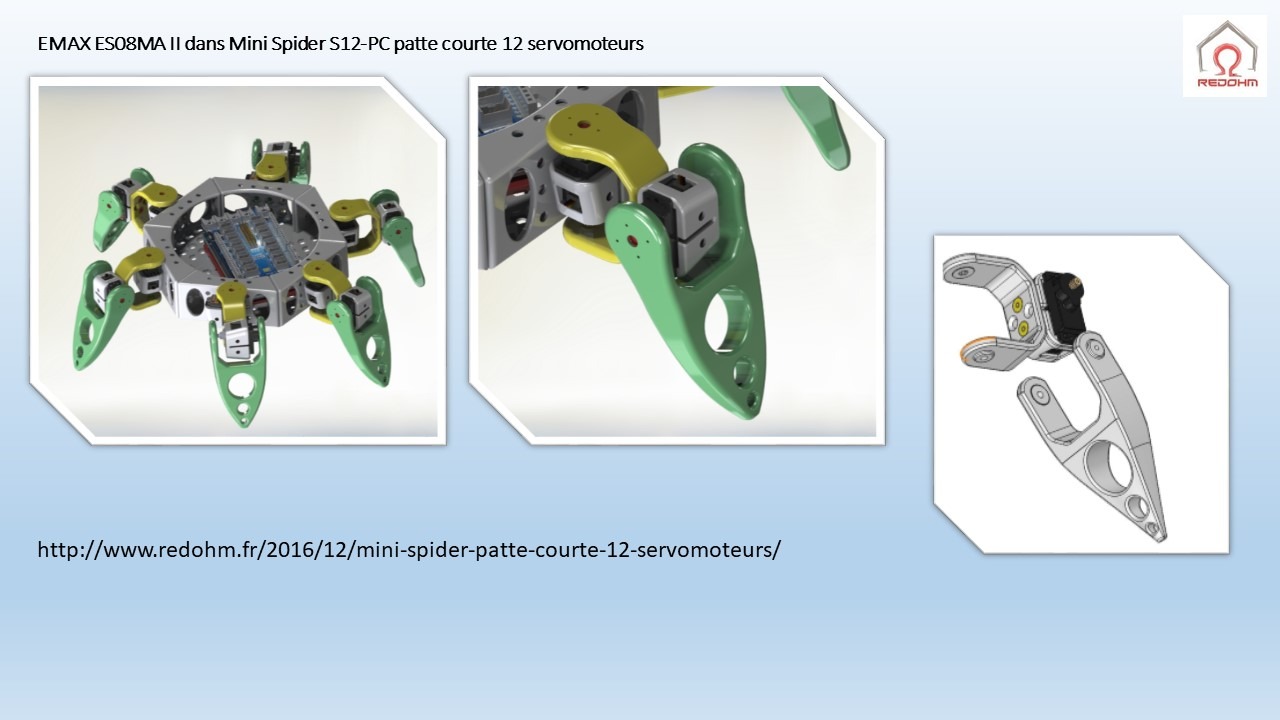 ES08MA II RedOhm Spider |
|
||
| Fournisseur : ⇒ Gotronic |
||
| Adafruit SM1449 Couple 1.6 kg/cm |
||
 SM1449 |
||
| Fournisseur : ⇒ Gotronic |
||
.
| Hitec HSR1425CR Couple 2.8 kg/cm |
Hitec HS325HD Couple 3 kg/cm |
|
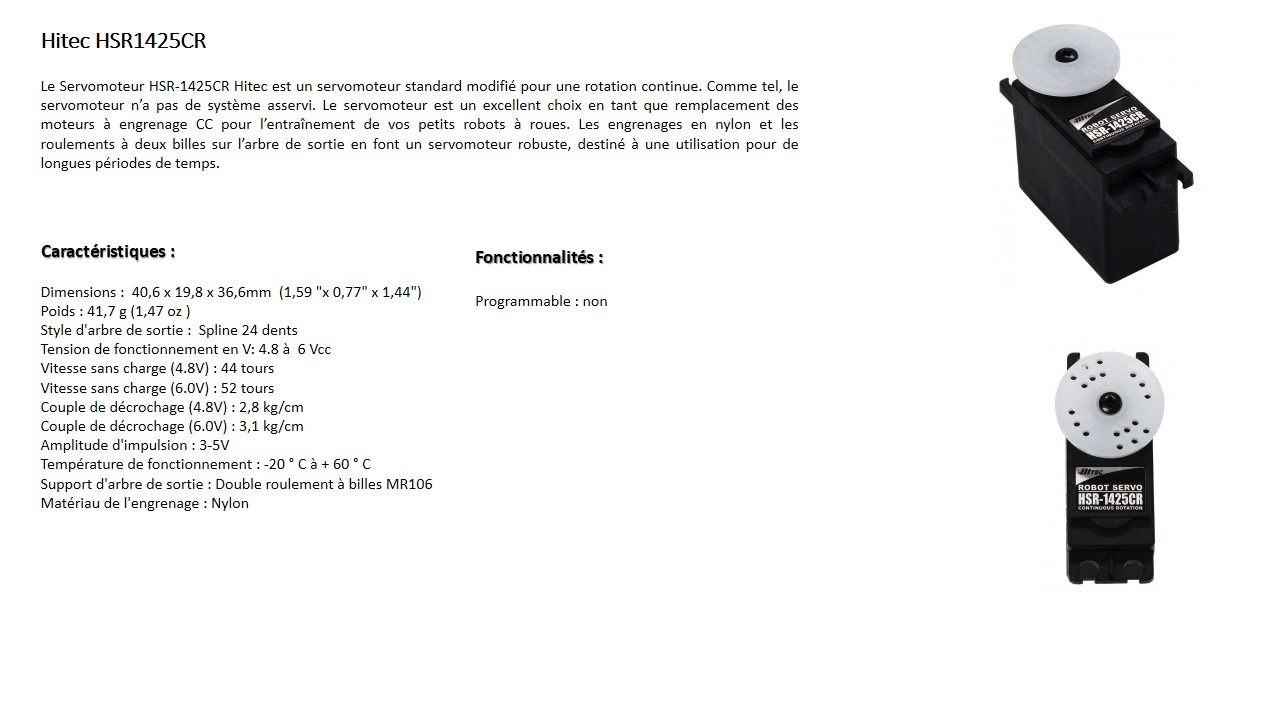 HSR-1425CR |
||
| Fournisseur : ⇒ Gotronic |
.
| Topmodel S317 Couple 4.2 kg/cm |
||
.
| Hitec HSB-9380TH Couple 34 kg/cm |
Savox SW-0241 MG Couple 40 Kg/cm |
|
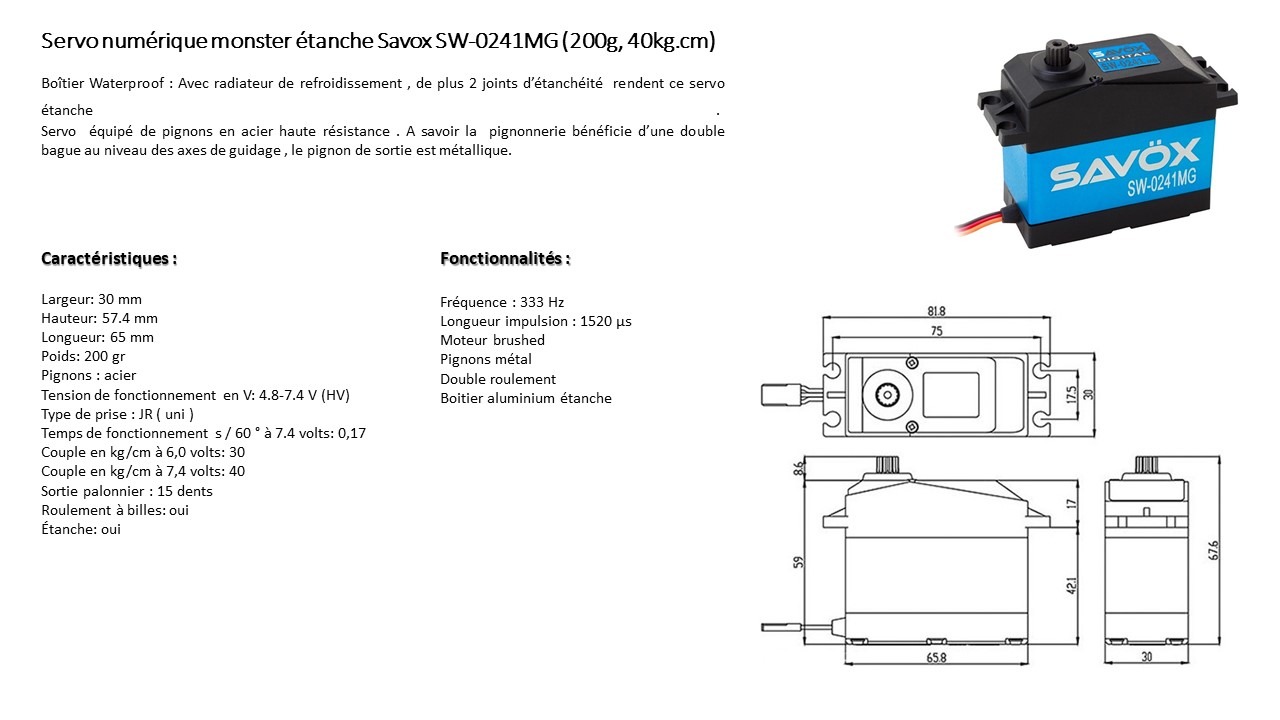 SAVOX SW-0241MG |
||
| Fournisseur: ⇒ Conrad |
| Hitec D-845WP Couple 50 kg/cm |
||
 D845WP |
||
.
| Topmodel 9944 Couple 99 kg/cm |
Application de ce type de servo chez RedOhm | |
 MASTODON 9944 |
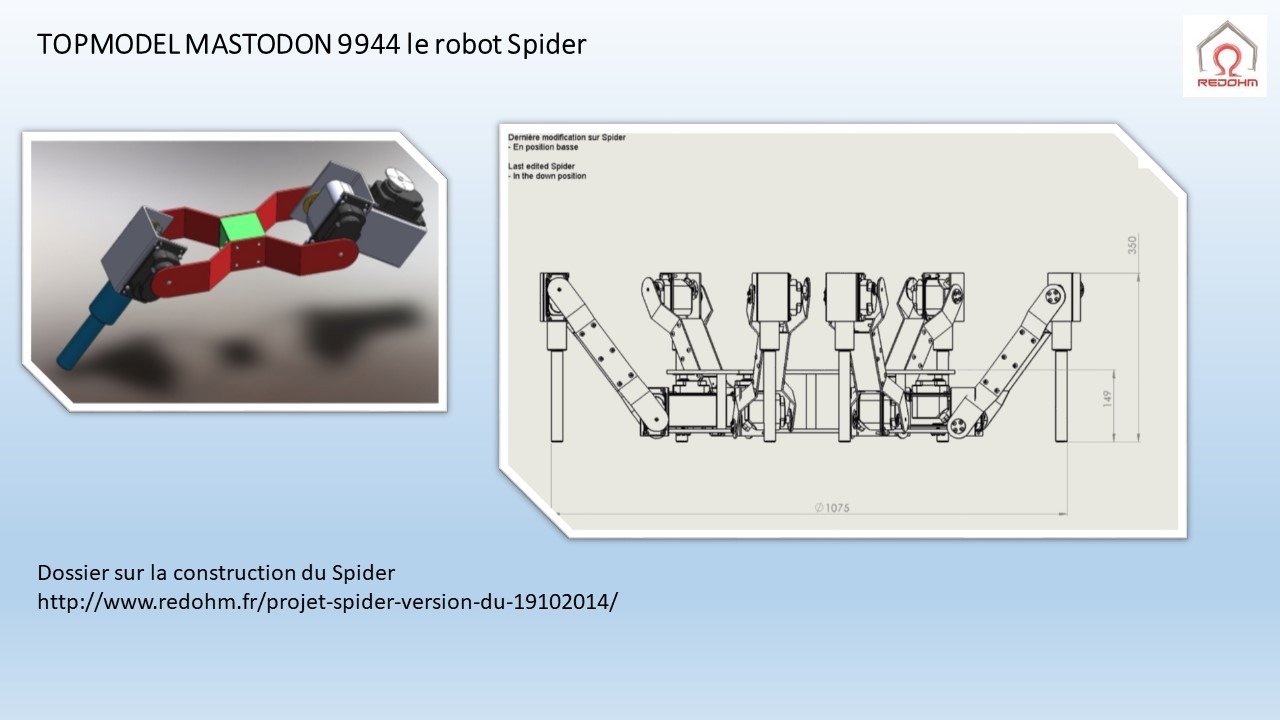 9944 avec le robot Spider |
|
| Fournisseur : ⇒ France Robotique |
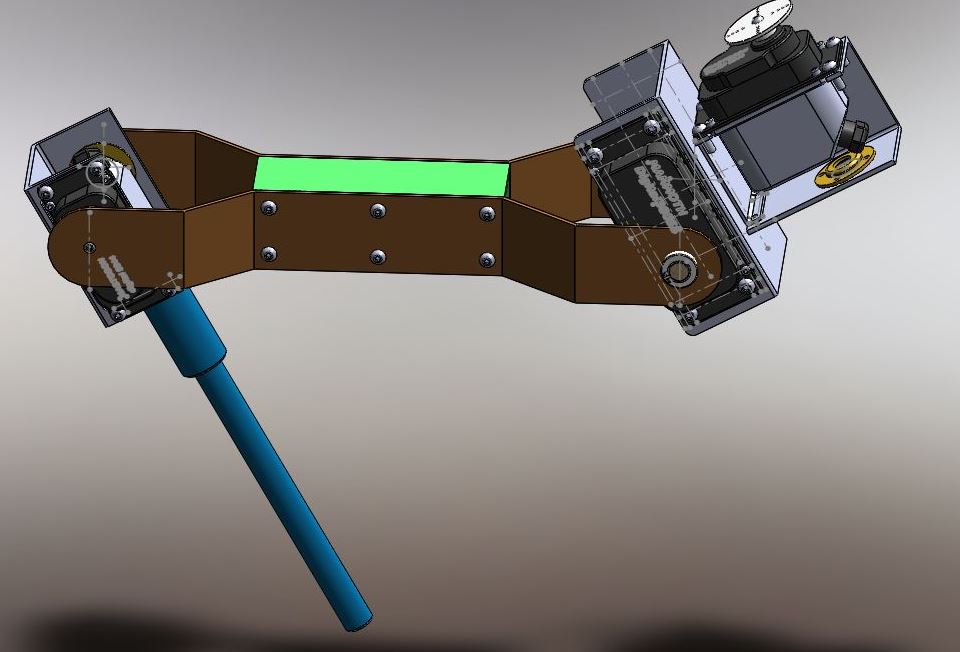
Le robot Spider Pilotage du bras du robot Maya |
|
.
| Hitec HSG1000SGT Couple 110kg/cm |
Hitec HSG1005SGT Couple 110kg/cm |
|
 HSG1000SGT |
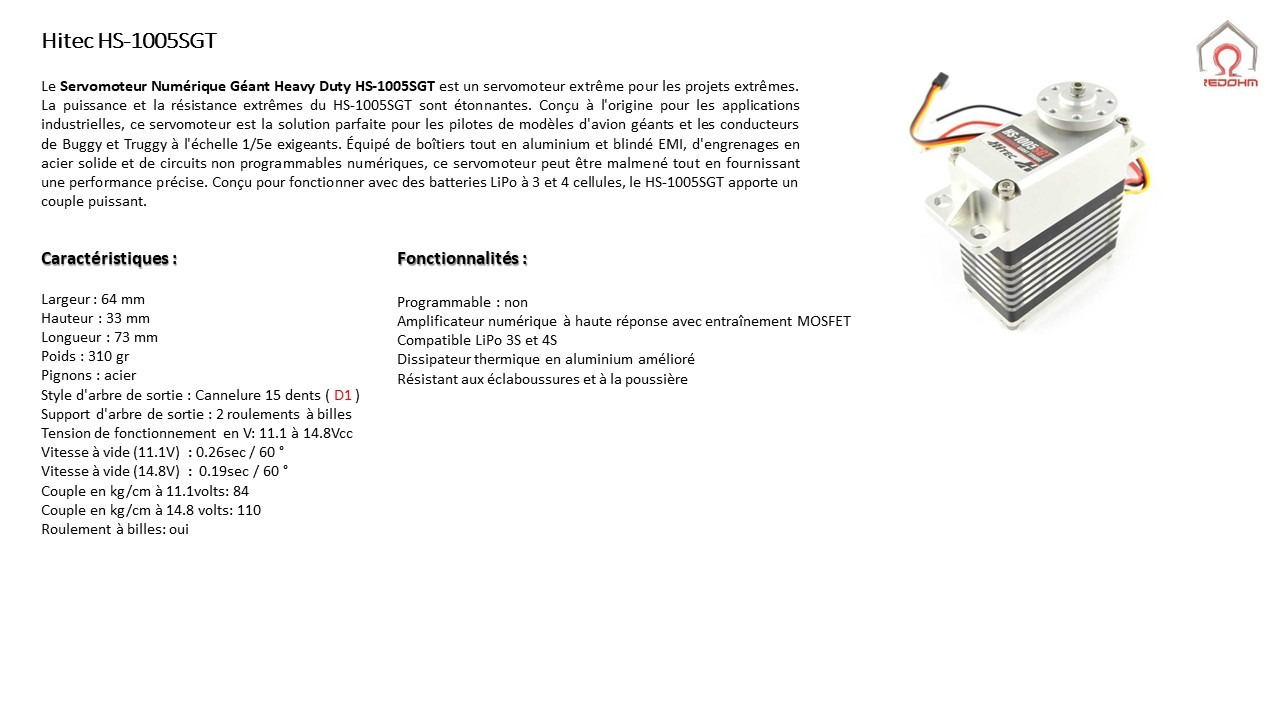 HSG1005SGT |
|
| Fournisseur : ⇒ France Robotique |
Fournisseur : ⇒ France Robotique |
.
|
Torxis i00600 – Couple 115 kg/cm |
||
 |
||
.
| Topmodel 38055 Couple 400 kg/cm |
||
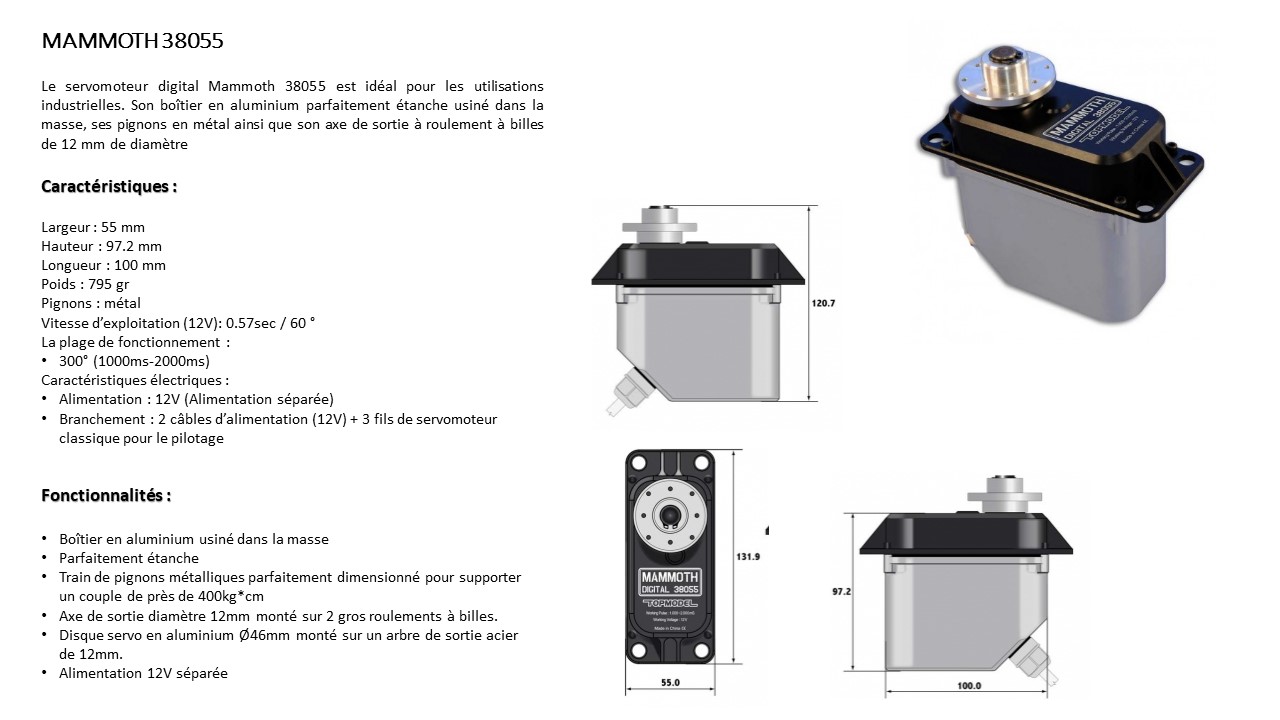 MAMMOTH 38055 |
||
| Fournisseur : ⇒ France Robotique |
.
Retour au sommaire
Informations collectées |
Cet article a été rédigé avec les informations collectées sur les sites constructeur ou revendeur suivants :
.
Retour au sommaire
A savoir sur l’utilisation des informations |
.
Les informations sur les caractéristiques et spécificités des servomoteurs et materiels qui sont fournis sur cette page correspondent aux informations des fiches techniques du constructeur si malgré le soin apporté à la réalisation de cet article une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable.
Les programmes , schémas et autres que ceux donnés par le constructeur font parti des montages utiles à nos applications si malgré le soin apporté à nos montages une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable .
L’ensemble des informations techniques de cet article a été utilisé pour nos applications, elles vous sont fournies comme un exemple de document de travail. Mais nous ne pourrions être tenu responsables d’une mauvaise utilisation de celle-ci.
.
Retour au sommaire
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire