
***
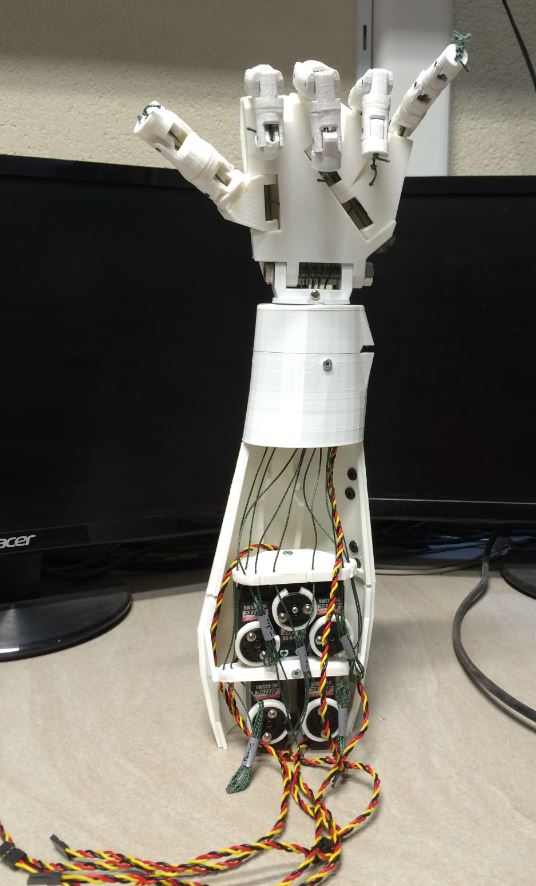
Mise à jour 04/06/2022 : Plusieurs améliorations ont été apportées au projet initial de la main gauche de Inmoov. La mise en place d’un pouce ajustable pour permettre la fermeture complète de la main et l’amélioration du système de tension des tendons.
Sommaire :
- Plusieurs améliorations ont été apportées au projet initial
- La mise en place d’un pouce ajustable pour permettre la fermeture complète de la main
- L’amélioration du système de tension des tendons.
- Contrôle de la consommation électrique de la main.
- Descriptif technique des différents matériels utilisés pour nos tests.
- Impression 3D des différentes pièces .
- Applications .
- Montage et programme permettant de régler et de tester les doigts et la rotation du poignée .
- Schéma électrique avec batterie ou pile .
- Schéma électrique avec régulateur et alimentation supérieure a 9V.
- Programme pour Arduino .
- Utilisation d’un capteur de flexion pour reproduire le mouvement des doigts
- Présentation du capteur de flexion .
- Caractéristiques
- Comment utilisé le capteur de flexion?
- Schéma de principe du pont diviseur de tension .
- Schéma électrique de principe du capteur de flexion avec batterie ou pile.
- Vidéo de démonstration du fonctionnement du capteur de flexion .
- Présentation du capteur de flexion .
- Utilisation de 5 capteurs de flexion pour reproduire le mouvement des doigts et les transmettre vers la main .
-
- Présentation et objectifs du montage .
- Liste du materiel
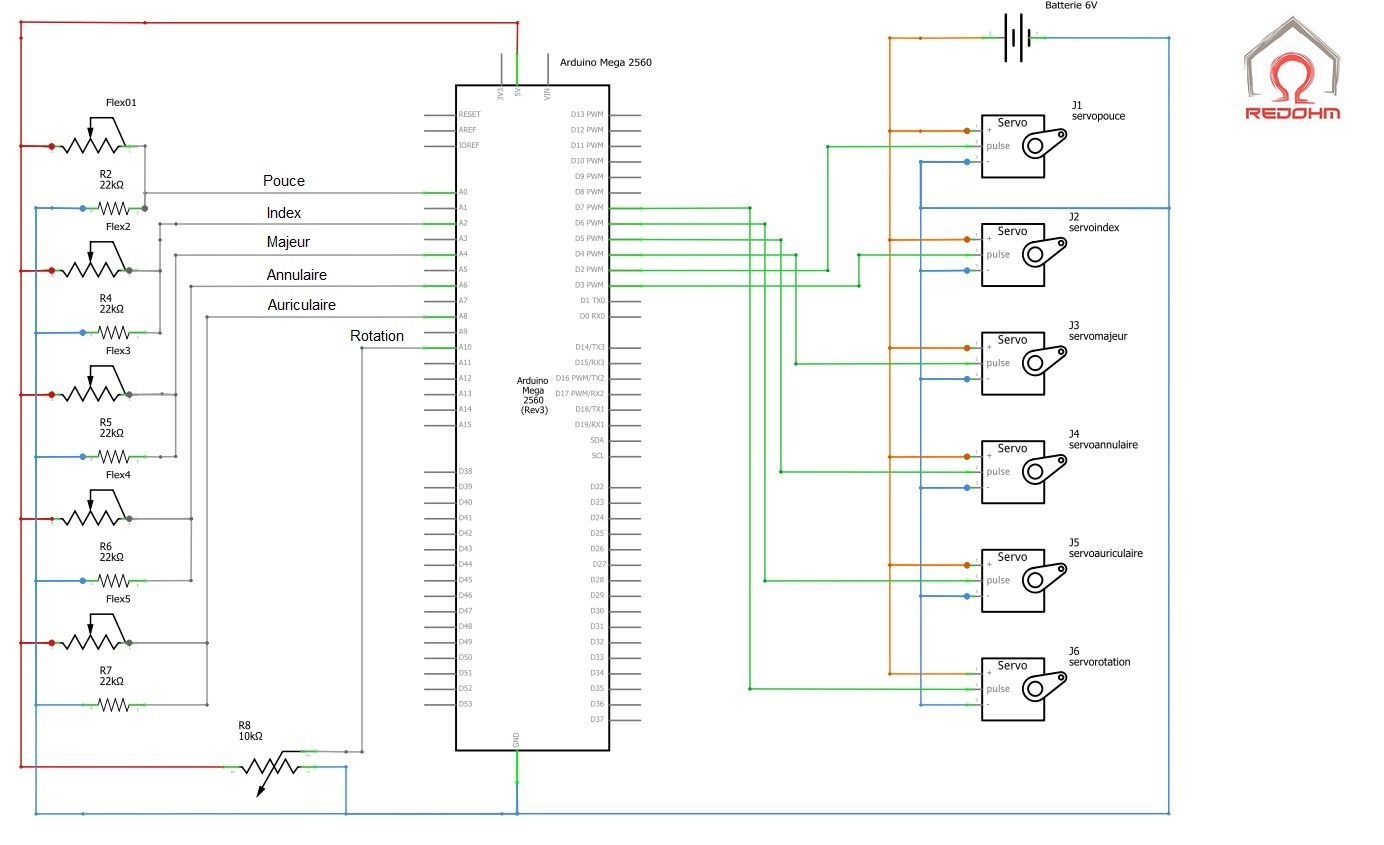
- Schéma électrique de câblage du gant de recopie et des servomoteurs de la main .
-
- Montage des capteurs de flexion sur le gant de recopie.
-
- Programme pour le fonctionnement de l’ensemble sur Arduino Mega 2560
- Vidéo de démonstration de l’ensemble .
-
- Montage et programme permettant de régler et de tester les doigts et la rotation du poignée .
.
Retour au sommaire![]()
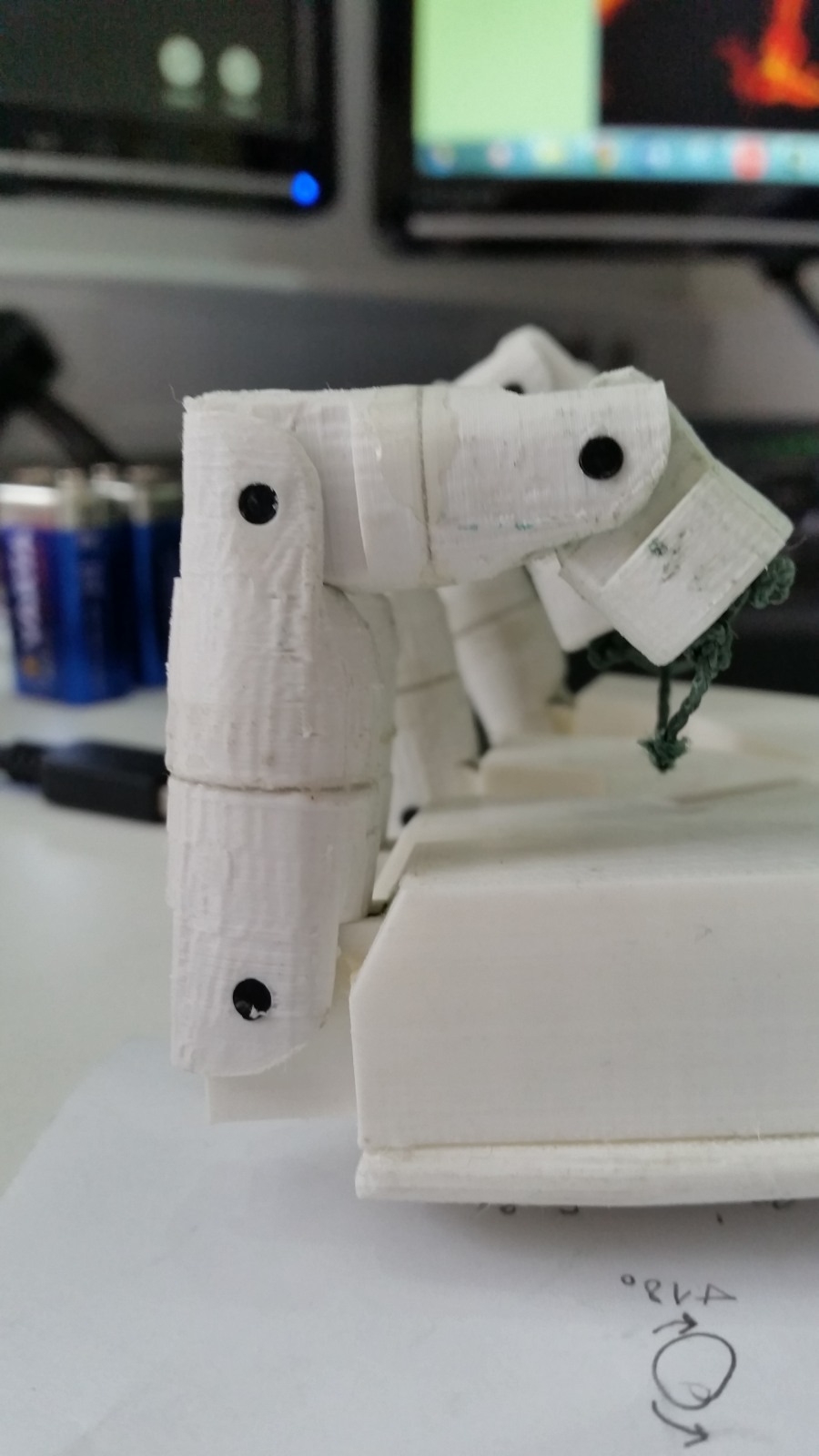
Plusieurs améliorations ont été apportées au projet initial |
a) La mise en place d’un pouce ajustable pour permettre la fermeture complète de la main

b) L’amélioration du système de tension des tendons
Nous avons consacré un article complet sur la modification des tendons -> allez à la Modification
Nous utilisons en terme de colle pour l’assemblage, une colle double composant résine et durcisseur à base d’époxy ainsi que de la cyanoacrylate pour la fixation définitive des tendons (nœud)
Pour les tendons, nous avons opté pour du fil de pèche de ø 1mm supportant 200lb (91kg) obtenu chez Amazon

L’assemblage des doigts se fait avec de la colle époxy ainsi que du filament de 3 mm de type ABS, il faut bien sûr repercer avec un foret de 3mm les orifices des phalanges. Leur assemblage est ainsi facilité.

Filament ABS de 3mm
.
![]()
Contrôle de la consommation électrique de la main. |
Nous avons utilisé une alimentation ISO-TECH ips 405 pour déterminer la consommation max du montage . Les alimentations des servomoteurs ne sont pas prises en directe sur la carte Arduino car celle-ci ne peut fournir plus de 200 mA .

Cette alimentation est programmable pouvant générer 30 V sous 5 Ampères maximum cela nous permet une grande compatibilité avec nos montages. Dans notre cas, elle était réglée sur 6V de façon à obtenir le couple maximum des servomoteurs .
Nous avons déjà d’une façon théorique, calculer la consommation de cette main , mais pour avoir une image réelle de la consommation qui est le reflet des frottements et autres anomalies qui pourraient éventuellement avoir. Nous avons voulu vérifier en dynamique cette consommation . Nous avons imaginé un petit programme qui met en scène tous les mouvements possibles des doigts .
Grace à cela, nous pouvons en déduire la puissance nécessaire , et faire nos cartes d’alimentations électroniques en conséquence.
.
![]()
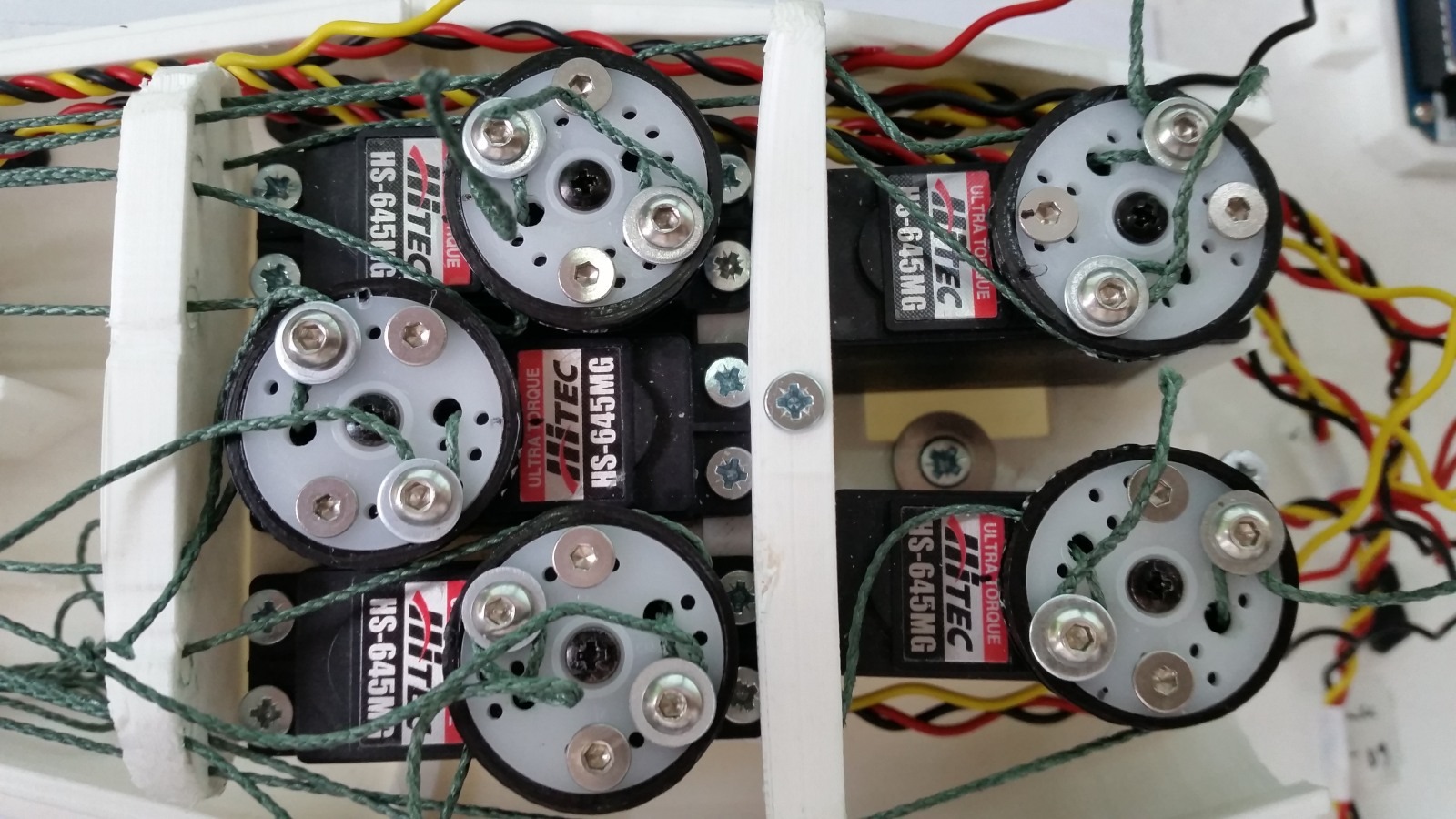
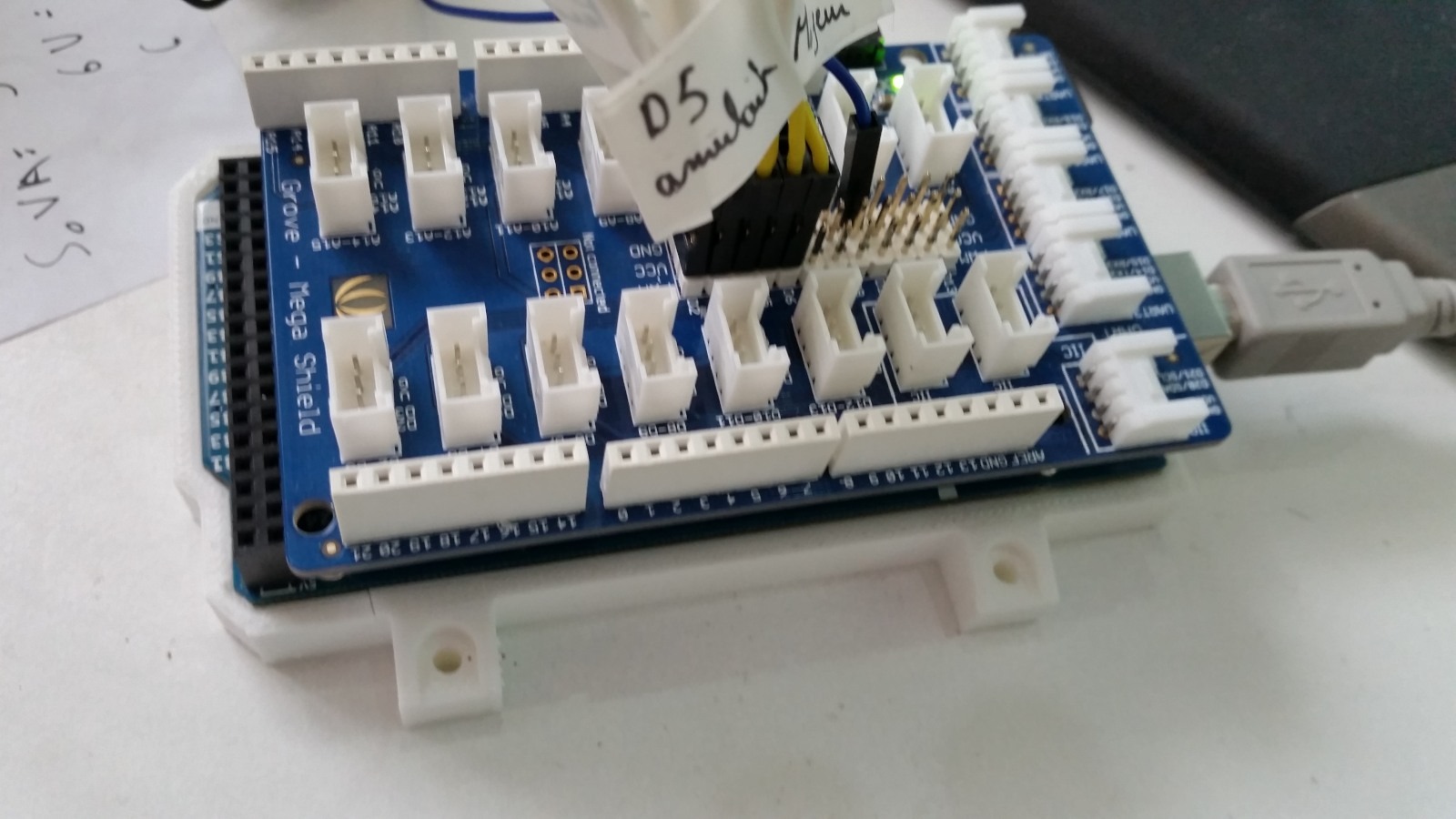
Descriptif technique des différents matériels utilisés pour nos tests |
Pour la partie télécommande, nous utilisons un Arduino méga 2560 surmonté d’un module Grove mega shield.
Pour la partie servomoteur, l’ensemble de l’avant-bras et géré par des HS-645MG de chez Hitec
Ce servomoteur à double roulements à billes se caractérise par un excellent centrage et un couple très élevé.
Alimentation: 4,8 à 6 Vcc
Course: 2 x 45°
Couple: 9,6 kg.cm
Vitesse: 0,2 s/60°
Dimensions: 41 x 20 x 36 mm
Poids: 54 gr
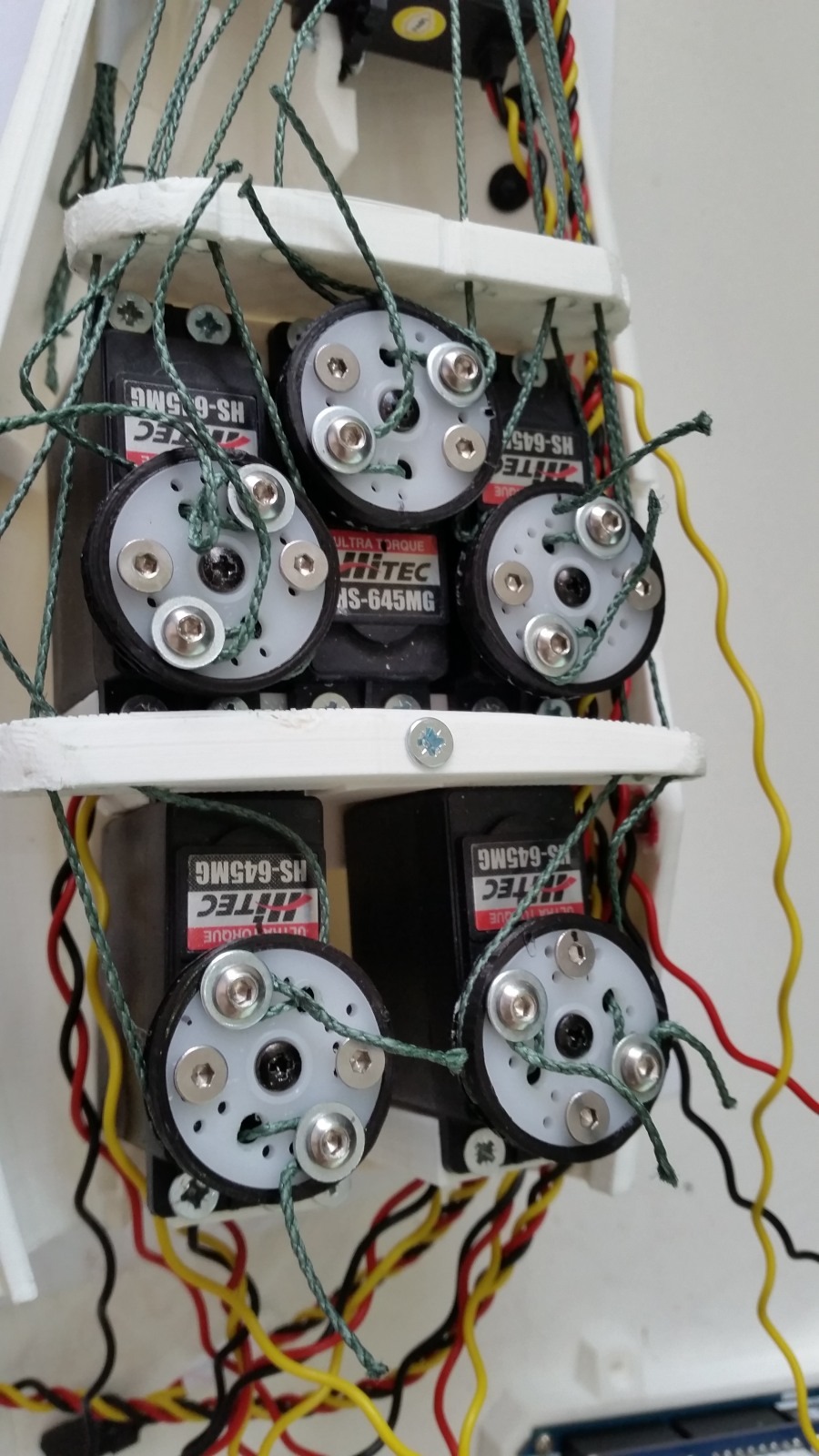
- 5 pour les tendons
- 1 pour le poignet
- 1 pour l’ajustage du pouce
.
![]()
Impression 3D des différentes pièces |
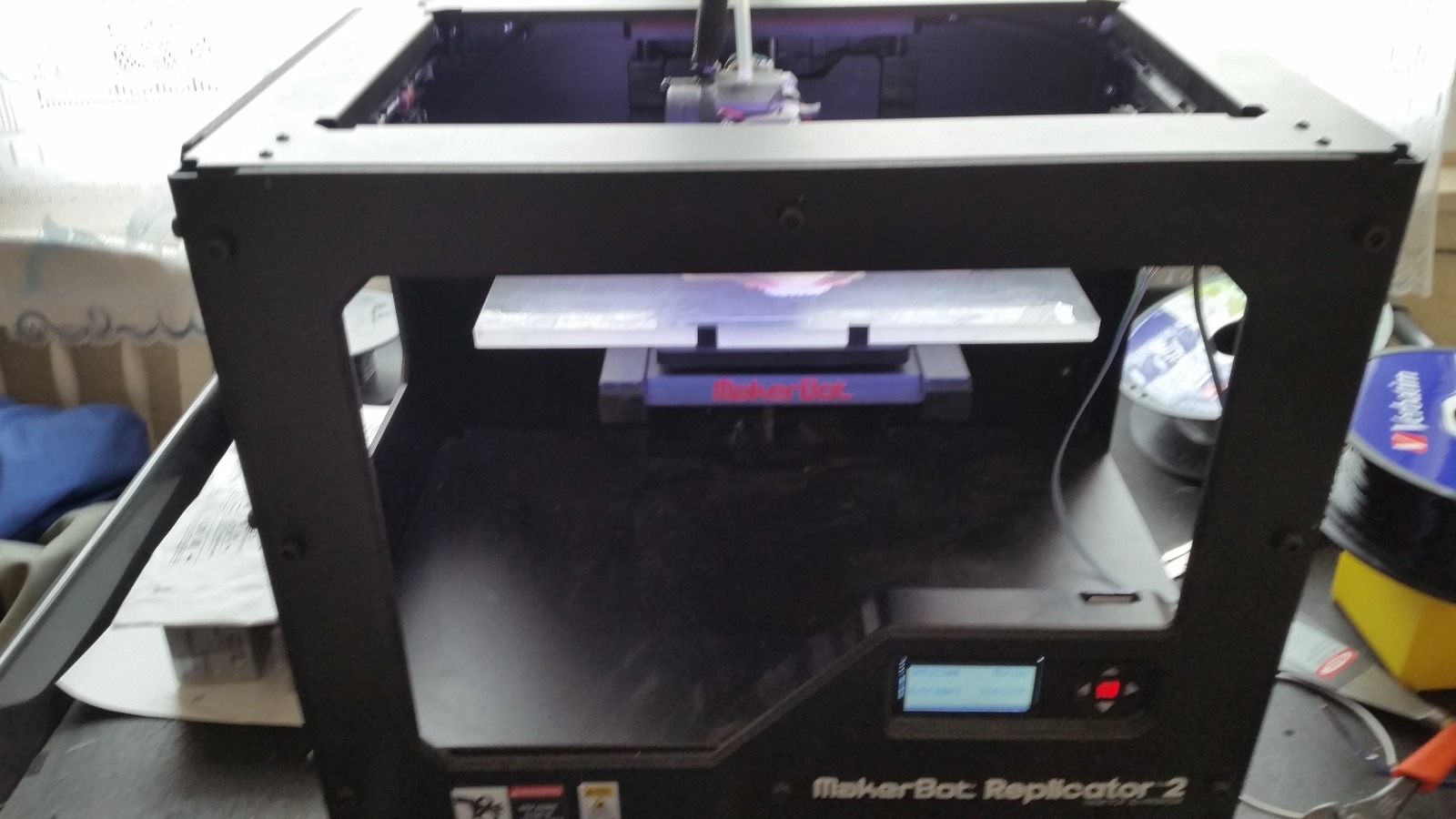 Pour l’ensemble du projet, l’imprimante 3D utilisée est une Makerbot Replicator 2
Pour l’ensemble du projet, l’imprimante 3D utilisée est une Makerbot Replicator 2
Toutes les pièces sont faites avec les réglages ci-dessous
Densité = 30%
Température = 215°C
Nombre de couche = 3
Épaisseur du trait = 0.15
Le temps total nécessaire et de 62 h 7 min
Pour un total de 715.76g de PLA
| Fichier initial | Temps de fabrication | poids(g) |
| Bolt_entretoise6 | 1h44 | 15,2 |
| leftcoverfinger1 | 1h10 | 16,6 |
| leftrobcap3V1 | 2h02 | 29,19 |
| Leftrobpart2V3 | 7h19 | 77,78 |
| leftrobpart3V3 | 5h39 | 58,57 |
| leftrobpart4V3 | 8h17 | 90,48 |
| Leftrobpart5V3 | 9h46 | 105,09 |
| leftthumb5 | 2h35 | 29,61 |
| lefttopsurface4 | 3h09 | 44,97 |
| LeftWristlargeV4 | 5h15 | 63,82 |
| leftWristsmallV3 | 2h17 | 27,87 |
| tendeur tendon RedohmV2 | 1h19 | 16,78 |
| Leftauriculaire5 | 1h04 | 10,97 |
| Leftindex5 | 1h29 | 15,78 |
| Leftmajeur3 | 1h44 | 18,8 |
| Leftringfinger3 | 1h19 | 14,11 |
| LeftRobCableBackV3 | 0h38 | 8,52 |
| LeftRobCableFrontV3 | 1h08 | 15,49 |
| LeftRobServoBedV5 | 4h48 | 56,13 |
| Total -> | 62h07mm | 715,76 g |
.
.
![]()
Applications |
1) Montage et programme permettant de régler et de tester les doigts et la rotation du poignée.
a) Schéma avec batterie ou pile.
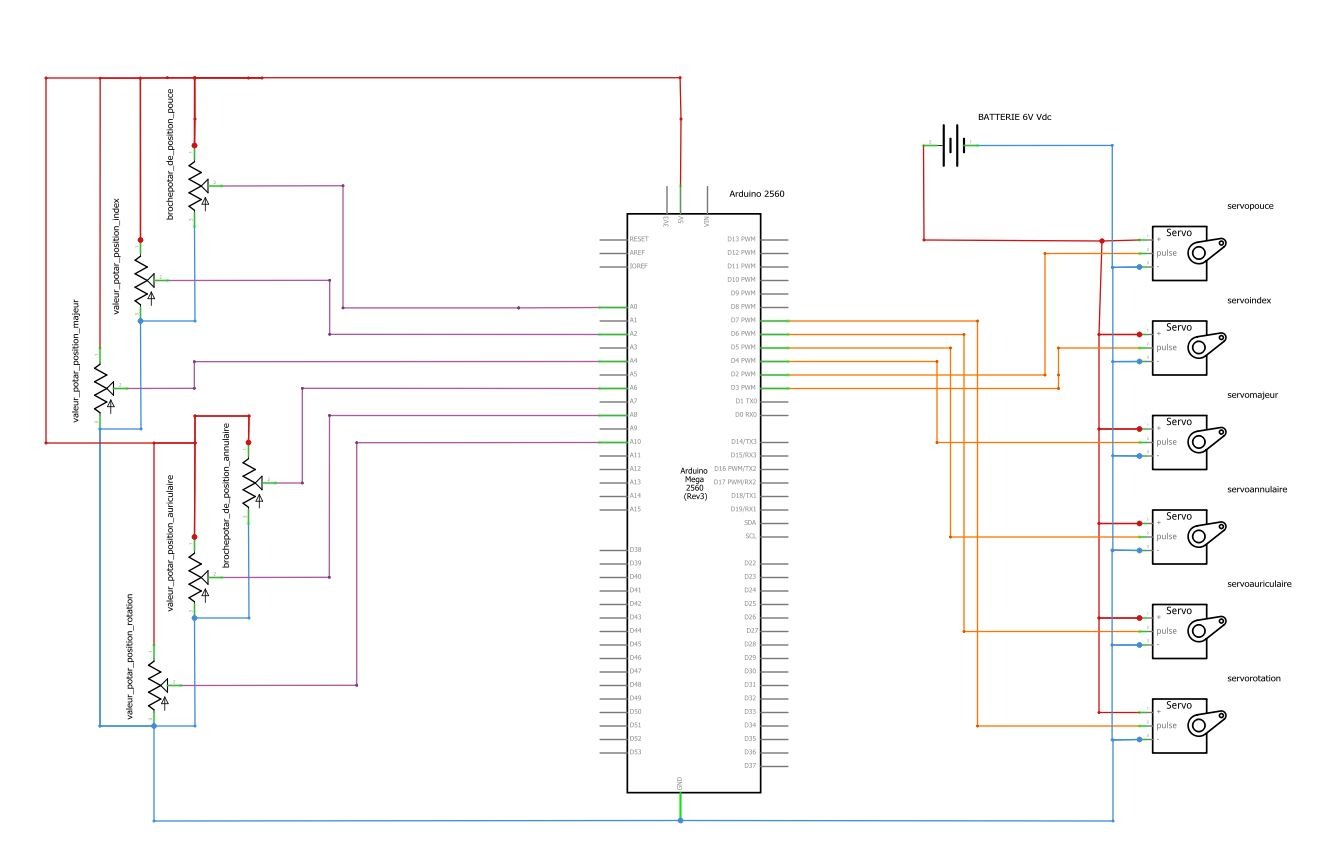
RedOhm schéma pour le pilotage de 6 servomoteurs avec potentiomètre.
.
b) Schéma électrique avec régulateur et alimentation supérieure a 9V.
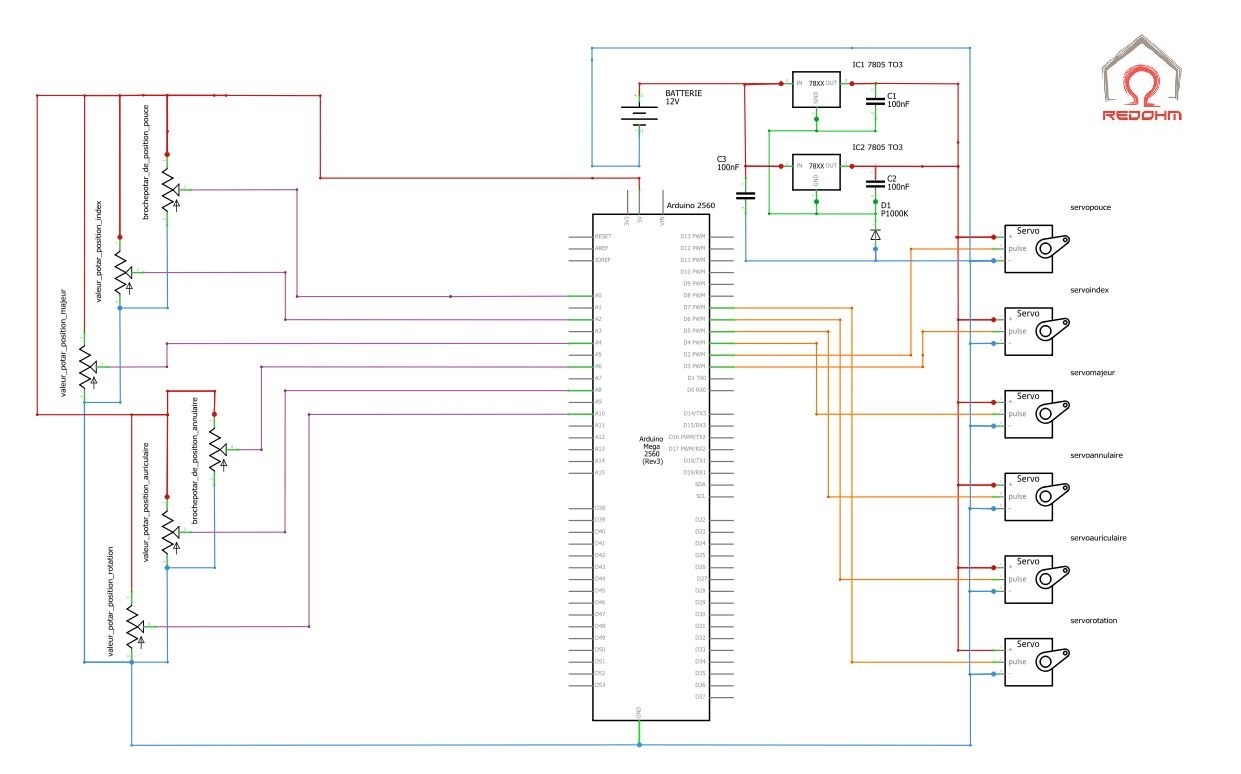
Schéma électrique pour 6 servomoteurs et régulation de la tension .
Pourquoi mettre des régulateurs en parallèles ?
Simplement pour augmenter le courant de sortie.
Comment calculer notre courant de sortie de notre montage ?
Il faut d’abord s’assurer du courant maximum des régulateurs en question (toujours prendre la même référence de régulateur pour un montage donné). Pour notre montage, nos régulateurs possèdent la référence suivante :MC7805CK . Le constructeur nous indique 3A maximum
Donc I_sortie = Nombre_de_régulateur * I_max soit 9A
A quoi servent les condensateurs aux bornes des régulateurs MC7805CK ?
Ce montage a tendance à entrer en oscillation. Il est très important que les condensateurs de découplage soit soudés le plus près possible de la sortie du régulateur et du retour à la masse de chaque régulateur.
Le courant est-il identique dans chaque régulateur ?
Il n’y a aucune importance que le courant de sortie se repartisse de façon identique dans chaque régulateur. Chaque régulateur va s’autoréguler.
Comment augmenter la tension de sortie d’un régulateur 5V pour obtenir du 6 ?
Il suffit simplement de l’adjonction d’une diode Zener ou une diode standart ( tension de jonction 0.7V ) dans la ligne de la masse qui a pour but d’augmenter la tension de sortie de la valeur de la tension de la diode en question.
Retour au sommaire.
c) Programme .
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 |
/* * * * * RedOhm * * * Positionnement des differents servomoteurs a l'aide * de 6 potentiometres * * Le 11/09/2016 * H.Mazelin * * Version 1.00 */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> servopouce Servo servopouce; // Crée un objet de type "Servo", nommé -> servoindex Servo servoindex; // Crée un objet de type "Servo", nommé -> servomajeur Servo servomajeur; // Crée un objet de type "Servo", nommé -> servoannulaire Servo servoannulaire; // Crée un objet de type "Servo", nommé -> servoauriculaire Servo servoauriculaire; // Crée un objet de type "Servo", nommé -> servorotation Servo servorotation; // declaration pour l'information du pouce en entree // broche sur lequel est branche le potentiometre pour animer du pouce int brochepotar_de_position_pouce=0; // variable contenant la valeur du potentiometre de du pouce int valeur_potar_position_pouce; // declaration pour l'information du index en entree // broche sur lequel est branche le potentiometre pour animer l'index int brochepotar_de_position_index=2; // variable contenant la valeur du potentiometre de l'index int valeur_potar_position_index; // declaration pour l'information du majeur en entree // broche sur lequel est branche le potentiometre pour animer le majeur int brochepotar_de_position_majeur=4; // variable contenant la valeur du potentiometre du majeur int valeur_potar_position_majeur; // declaration pour l'information du l'annulaire en entree // broche sur lequel est branche le potentiometre pour animer l'annulaire int brochepotar_de_position_annulaire=6; // variable contenant la valeur du potentiometre du annulaire int valeur_potar_position_annulaire; // declaration pour l'information de auriculaire en entree // broche sur lequel est branche le potentiometre pour animer l'auriculaire int brochepotar_de_position_auriculaire=8; // variable contenant la valeur du potentiometre de 1'auriculaire int valeur_potar_position_auriculaire; // declaration pour l'information pour la rotation en entree // broche sur lequel est branche le potentiometre pour animer la rotation int brochepotar_de_position_rotation=10; // variable contenant la valeur du potentiometre de rotation int valeur_potar_position_rotation; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. Serial.begin(9600); // associe le servomoteur servopouce a la broche 2 servopouce.attach(2); // associe le servomoteur servoindex a la broche 3 servoindex.attach(3); // associe le servomoteur servomajeur a la broche 4 servomajeur.attach(4); // associe le servomoteur servoannulaire a la broche 5 servoannulaire.attach(5); // associe le servomoteur servoauriculaire a la broche 6 servoauriculaire.attach(6); // associe le servomoteur servoauriculaire a la broche 7 servorotation.attach(7); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { //***************************************************** //traitement et pilotage du pouce //***************************************************** //traitement de pilotage du pouce valeur_potar_position_pouce=analogRead( brochepotar_de_position_pouce); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_pouce=map(valeur_potar_position_pouce,0,1023,80,168); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servopouce.write(valeur_potar_position_pouce); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map // Serial.println( valeur_potar_position_pouce); delay(20); //***************************************************** //traitement et pilotage de l'index //***************************************************** //traitement de pilotage du index valeur_potar_position_index=analogRead( brochepotar_de_position_index); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_index=map(valeur_potar_position_index,0,1023,80,160); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoindex.write(valeur_potar_position_index); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map //Serial.println( valeur_potar_position_index); delay(20); //***************************************************** //traitement et pilotage du majeur //***************************************************** valeur_potar_position_majeur=analogRead( brochepotar_de_position_majeur); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_majeur=map(valeur_potar_position_majeur,0,1023,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servomajeur.write(valeur_potar_position_majeur); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map //Serial.println( valeur_potar_position_majeur); delay(20); //***************************************************** //traitement et pilotage de l'annulaire //***************************************************** //traitement de pilotage de l'annulaire valeur_potar_position_annulaire=analogRead( brochepotar_de_position_annulaire); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_annulaire=map(valeur_potar_position_annulaire,0,1023,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoannulaire.write(valeur_potar_position_annulaire); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map Serial.println( valeur_potar_position_annulaire); delay(20); //***************************************************** //traitement et pilotage de l'auriculaire //***************************************************** //traitement de pilotage de l'auriculaire valeur_potar_position_auriculaire=analogRead( brochepotar_de_position_auriculaire); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_auriculaire=map(valeur_potar_position_auriculaire,0,1023,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoauriculaire.write(valeur_potar_position_auriculaire); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map // Serial.println( valeur_potar_position_auriculaire); delay(20); //***************************************************** //traitement et pilotage pour la rotation //***************************************************** //traitement pour le pilotage de la rotation valeur_potar_position_rotation=analogRead( brochepotar_de_position_rotation); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_rotation=map(valeur_potar_position_rotation,0,1023,75,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servorotation.write(valeur_potar_position_rotation); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map . // Serial.println( valeur_potar_position_rotation); delay(20); } |
Programme ci-dessus à télécharger .
Téléchargement ->essai_de_la_main_le_10_09_2016
.
2) Utilisation d’un capteur de flexion pour reproduire le mouvement des doigts
a) Présentation du capteur de flexion .
Le capteur de flexion est l’une des pièces souvent négligée par l’utilisateur, mais si vous avez besoin de vérifier si quelque chose se plie , comme un doigt ou un bras ce type de capteur semble tout indiqué pour votre application .
Capteur de flexion souple résistif. La résistance augmente lorsque l’angle de flexion du capteur augmente.
A savoir : Il faut éviter de plier la base du capteur.
Caractéristiques :
Résistance au repos: 10 kΩ
Tolérance: ±30 %
Variation: 60 à 110 kΩ
Puissance: 0,5 W
Durée de vie: 1 million de cycles
Dimensions: 112 x 6 x 0,43 mm
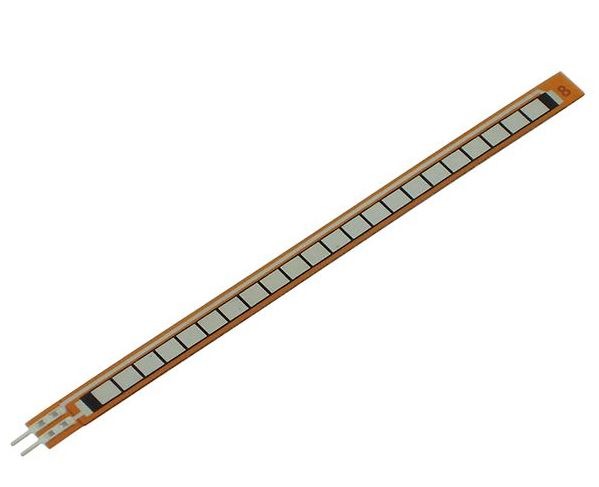
Capteur de flexion
Comment utiliser le capteur de flexion?
Le capteur Flex modifie sa résistance en flexion de sorte que nous pouvons mesurer ce changement sur l’une des broches analogique de la carte Arduino. Mais pour cela nous avons besoin d’une résistance fixe que nous allons utiliser pour cette comparaison (la résistance utilisée dans le montage est de valeur 22 KΩ).
Ce type de montage est appelé : pont diviseur de tension .On divise la tension du 5 V délivré par la carte microcontrôleur entre le capteur flexion est la résistance de 22KΩ .
Schéma de principe du pont diviseur de tension .
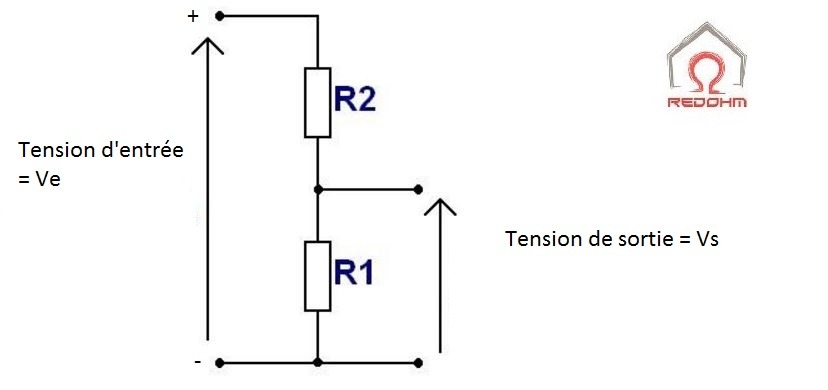
Schéma de principe du pont diviseur de tension
.
b) Schéma électrique de principe du capteur de flexion avec batterie ou pile
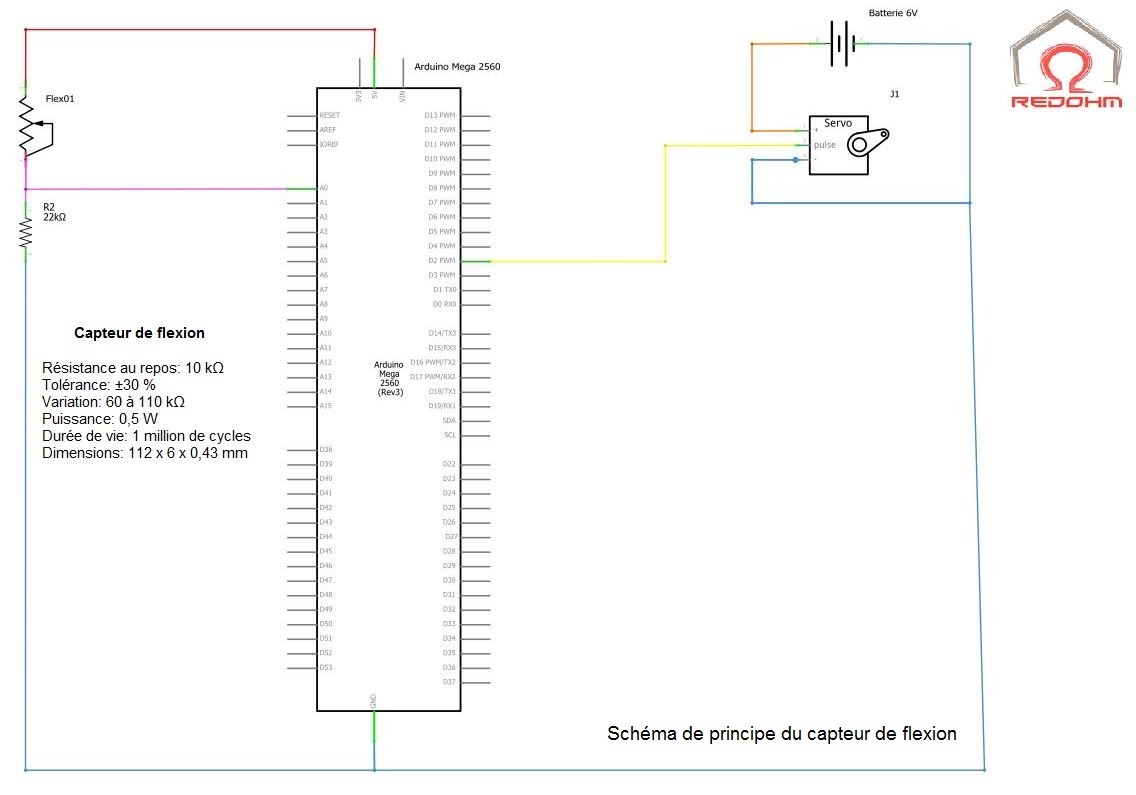
Schéma de principe du capteur de flexion
.
c) Démonstration du fonctionnement du capteur de flexion .
Retour au sommaire
.
3) Utilisation de 5 capteurs de flexion pour reproduire le mouvement des doigts et les transmettre vers la main.
a) Présentation et objectifs du montage .
Le but de ce montage et de copier les mouvements des doigts et de les retransmettre via une carte microcontrôleur à l’avant bras du projet Inmoov .Pour cela, nous allons créer un gant équipé de capteurs de flexion pour chaque doigt. Nous allons donc utiliser trois capteurs de type FS7548 que nous allons affecté à l’index, majeur et annulaire , et deux autres capteurs de type FS7954 qui eux seront affectés au pouce et à l’auriculaire .
.
Retour au sommaire.
b) Liste du materiel.
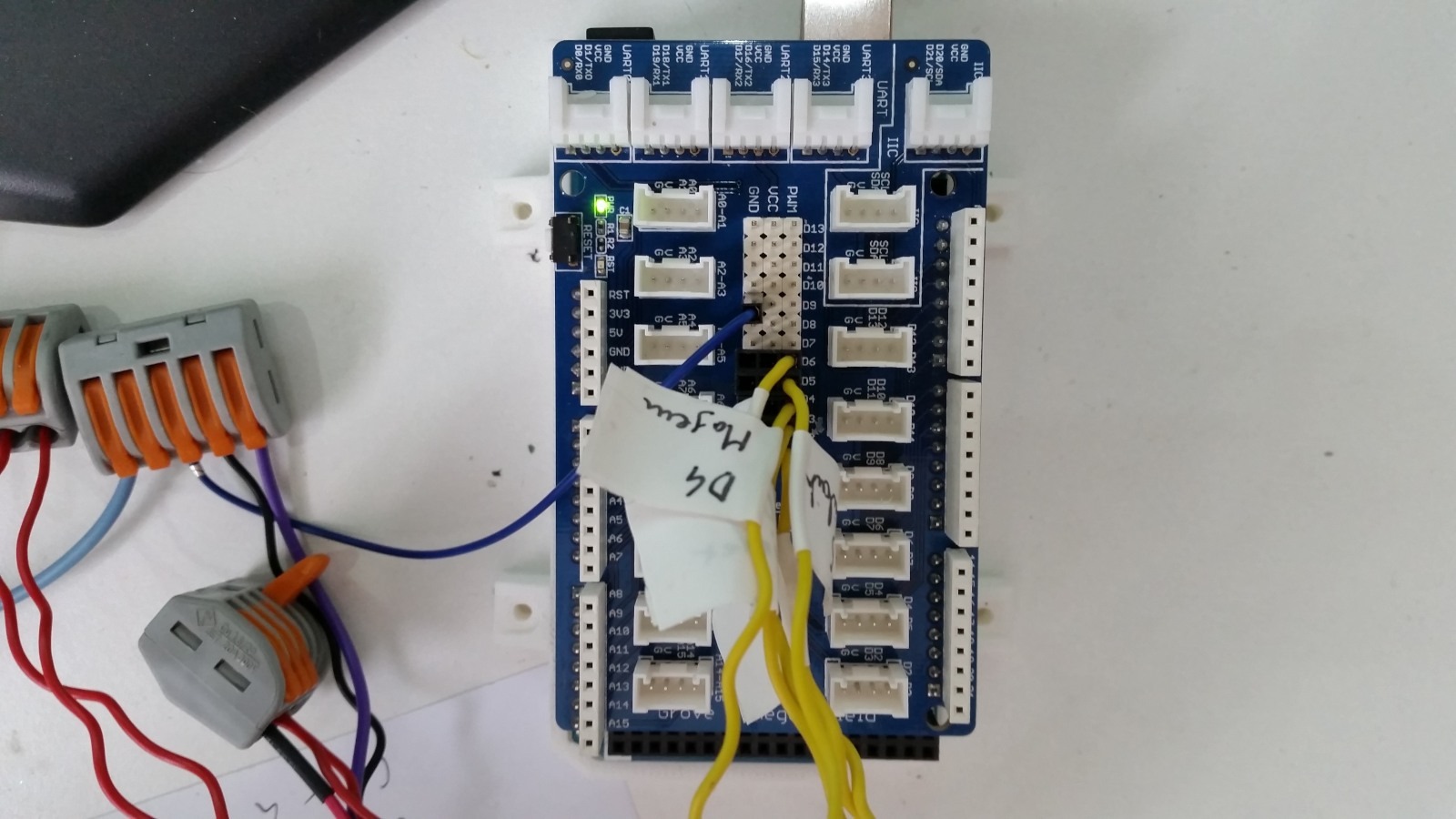
![]()
Avec utilisation du materiel Grove |
|||
| Quantité | Référence | Désignation | Prix moyen |
| 1 |
Carte Arduino MEGA 2560 Fournisseur : generationrobot |
La carte Arduino Mega 2560 est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs. | 37€ à 45€ |
| 1 | Shield de connexion cartes Arduino Mega
Fournisseur : generationrobot |
Grove – Mega Shield est une shield de connexion pour cartes Arduino Mega et Google Android ADK. | 10€ à 12€ |
| 3 |
Capteur de flexion FS7548 Fournisseur :
|
Capteur de flexion souple résistif. La résistance augmente lorsque l’angle de flexion du capteur augmente. Résistance au repos: 10 kΩ Dimensions: 112 x 6 x 0,43 mm Affectation : index,majeur,annulaire |
18€ à 22€ |
| 2 | Capteur de flexion FS7954
Fournisseur : |
Capteur de flexion souple résistif. La résistance augmente lorsque l’angle de flexion du capteur augmente. |
10€ à 14€ |
| 5 | Résistance 1/4W 22KΩ
Fournisseur : |
Résistances à couche carbone ¼ W. Tolérance: 5% – Tension max: 250 V Diamètre 2.3 mm – Longueur 6.5 mm. |
0.08€ à 0.12€ |
| 1 |
Gaine thermorétractable Fournisseur : |
Polyoléfine très flexible – Longueur: 1.20 m – Taux de retreint 2:1.
|
1.5€ à 1.90€ |
Retour au sommaire
.
c) Schéma électrique du câblage des gants de recopie et de la main .
.
Retour au sommaire.
d ) Montage des capteurs de flexion sur le gant de recopie.

La gaine rétractable est coupée de la longueur de la sonde . On prend soin de chauffer l’extrémité de la gaine de façon que le capteur ne puisse s’échapper de son logement, puis on la fixe avec de la colle néoprène sur la partie supérieure du doigt du gant.Enfin,on répète cette opération pour chacun des doigts .

Insertion des capteurs de flexion dans la gaine thermo-rétractable
Insertion des capteurs de flexion dans la gaine thermo-rétractable.

Vue du gant prêt à fonctionner
.
Retour au sommaire.
e ) Programme pour le fonctionnement de l’ensemble sur Arduino Mega 2560 .
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 |
/* * * * * RedOhm * * * Positionnement des differents servomoteurs a l'aide * du gant de recopie * * A savoir : * Nous avons repris le programme précédent et nous avons * modifier quelques parametres * * Le 21/09/2016 * H.Mazelin * * Version 1.00 */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> servopouce Servo servopouce; // Crée un objet de type "Servo", nommé -> servoindex Servo servoindex; // Crée un objet de type "Servo", nommé -> servomajeur Servo servomajeur; // Crée un objet de type "Servo", nommé -> servoannulaire Servo servoannulaire; // Crée un objet de type "Servo", nommé -> servoauriculaire Servo servoauriculaire; // Crée un objet de type "Servo", nommé -> servorotation Servo servorotation; // declaration pour l'information du pouce en entree // broche sur lequel est branche le capteur de flexion afin d'animer du pouce int brochepotar_de_position_pouce=0; // variable contenant la valeur du capteur de flexion du pouce int valeur_potar_position_pouce; // declaration pour l'information du index en entree // broche sur lequel est branche le capteur de flexion afin d'animer l'index int brochepotar_de_position_index=2; // variable contenant la valeur du capteur de flexion de l'index int valeur_potar_position_index; // declaration pour l'information du majeur en entree // broche sur lequel est branche le capteur de flexion afin d'animer le majeur int brochepotar_de_position_majeur=4; // variable contenant la valeur du capteur de flexion du majeur int valeur_potar_position_majeur; // declaration pour l'information du l'annulaire en entree // broche sur lequel est branche le capteur de flexion afin d'animer l'annulaire int brochepotar_de_position_annulaire=6; // variable contenant la valeur du capteur de flexion de l'annulaire int valeur_potar_position_annulaire; // declaration pour l'information de auriculaire en entree // broche sur lequel est branche le capteur de flexion afin d'animer l'auriculaire int brochepotar_de_position_auriculaire=8; // variable contenant la valeur du capteur de flexion de 1'auriculaire int valeur_potar_position_auriculaire; // declaration pour l'information pour la rotation en entree // broche sur lequel est branche le potentiometre pour animer la rotation int brochepotar_de_position_rotation=10; // variable contenant la valeur du potentiometre de rotation int valeur_potar_position_rotation; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. Serial.begin(9600); // associe le servomoteur servopouce a la broche 2 servopouce.attach(2); // associe le servomoteur servoindex a la broche 3 servoindex.attach(3); // associe le servomoteur servomajeur a la broche 4 servomajeur.attach(4); // associe le servomoteur servoannulaire a la broche 5 servoannulaire.attach(5); // associe le servomoteur servoauriculaire a la broche 6 servoauriculaire.attach(6); // associe le servomoteur servoauriculaire a la broche 7 servorotation.attach(7); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { //***************************************************** //traitement et pilotage du pouce //***************************************************** //traitement de pilotage du pouce valeur_potar_position_pouce=analogRead( brochepotar_de_position_pouce); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination // attention a bien mettre la valeur du capteur de flexion dans la fonction map // récupérer les bonnes valeurs avec le programme etalonnage dispo sur le site REDOHM valeur_potar_position_pouce=map(valeur_potar_position_pouce,250,423,80,168); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servopouce.write(valeur_potar_position_pouce); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map // Serial.println( valeur_potar_position_pouce); delay(20); //***************************************************** //traitement et pilotage de l'index //***************************************************** //traitement de pilotage du index valeur_potar_position_index=analogRead( brochepotar_de_position_index); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination // attention a bien mettre la valeur du capteur de flexion dans la fonction map // récupérer les bonnes valeurs avec le programme etalonnage dispo sur le site REDOHM valeur_potar_position_index=map(valeur_potar_position_index,658,500,80,160); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoindex.write(valeur_potar_position_index); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map //Serial.println( valeur_potar_position_index); delay(20); //***************************************************** //traitement et pilotage du majeur //***************************************************** valeur_potar_position_majeur=analogRead( brochepotar_de_position_majeur); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination // attention a bien mettre la valeur du capteur de flexion dans la fonction map // récupérer les bonnes valeurs avec le programme etalonnage dispo sur le site REDOHM valeur_potar_position_majeur=map(valeur_potar_position_majeur,706,535,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servomajeur.write(valeur_potar_position_majeur); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map //Serial.println( valeur_potar_position_majeur); delay(20); //***************************************************** //traitement et pilotage du l'annulaire //***************************************************** //traitement de pilotage du l'annulaire valeur_potar_position_annulaire=analogRead( brochepotar_de_position_annulaire); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination // attention a bien mettre la valeur du capteur de flexion dans la fonction map // récupérer les bonnes valeurs avec le programme etalonnage dispo sur le site REDOHM valeur_potar_position_annulaire=map(valeur_potar_position_annulaire,677,486,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoannulaire.write(valeur_potar_position_annulaire); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map //Serial.println( valeur_potar_position_annulaire); delay(20); //***************************************************** //traitement et pilotage de l'auriculaire //***************************************************** //traitement de pilotage de l'auriculaire valeur_potar_position_auriculaire=analogRead( brochepotar_de_position_auriculaire); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination // attention a bien mettre la valeur du capteur de flexion dans la fonction map // récupérer les bonnes valeurs avec le programme etalonnage dispo sur le site REDOHM valeur_potar_position_auriculaire=map(valeur_potar_position_auriculaire,325,442,80,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servoauriculaire.write(valeur_potar_position_auriculaire); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map // Serial.println( valeur_potar_position_auriculaire); delay(20); //***************************************************** //traitement et pilotage pour la rotation //***************************************************** //traitement pour le pilotage de la rotation valeur_potar_position_rotation=analogRead( brochepotar_de_position_rotation); // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_rotation=map(valeur_potar_position_rotation,0,1023,75,175); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servorotation.write(valeur_potar_position_rotation); // La fonction c-dessous peut-etre activée afin de vous aider à regler les parametres de la // fonction Map . // Serial.println( valeur_potar_position_rotation); delay(20); } |
.
Retour au sommaire.
f ) Vidéo de démonstration de l’ensemble .
| Retour au sommaire | Retour à la foire aux questions |
.
![]()