
- Version
- Télécharger 20
- Taille du fichier 0.20 KB
- Date de création 25 avril 2022
- Télécharger
Mise à jour le 06/05/2022 : Article regroupant les tuto et les fichiers de la carte de commande Tic T834 de Pololu basée sur un circuit DRV8834 permettant le contrôle d'un moteur pas-à-pas bipolaire.
Sommaire.
- Présentation de la carte .
- Information technique .
- Ensemble des schémas de câblage
- Code et tuto pour le pilotage d'une carte Pololu 3133 en I2c
- Pour tout probléme.
- Retour au menu
![]()
Présentation de la carte Pololu 3133 |
![]()
Information technique |
.
Carte de commande multi-interfaces Tic T834 de Pololu basée sur un circuit DRV8834 permettant le contrôle d'un moteur pas-à-pas bipolaire. Ce driver peut être commandé via plusieurs interfaces telles que USB, I2C, série TTL, signal RC, analogique, etc et nécessite l'utilisation d'un logiciel disponible en téléchargement pour la configuration.
Cette carte dispose de plusieurs modes de fonctionnement "microsteps": pas complet, demi-pas, quart de pas, 1/8 de pas, 1/16 de pas ou 1/32 de pas. La vitesse maximale peut être de 50 000 pas/seconde et la vitesse minimale jusqu'à 1 pas toutes les 200 secondes. Un guide d'utilisation complet est disponible (uniquement en anglais) dans l'onglet ''fiche technique''.
Ce module peut être commandé via plusieurs interfaces :
- Via une fiche micro-USB , pour une connexion directe à un ordinateur.
- Série TTL en 5 Vcc pour une utilisation avec un microcontrôleur
- I2C pour une utilisation avec un microcontrôleur
- Signal RC (radio-commande)
- Signal analogique pour une utilisation avec un potentiomètre
- Entrée pour encodeur à quadrature à utiliser avec un encodeur rotatif
- Entrées digitales STEP/DIR
Alimentation:
- partie moteur: 2,5 à 10,8 Vcc
- partie logique: aucune, régulateur 5 Vcc intégré
Sortie: 1,5 A par phase
Vitesse maxi: 50000 pas par seconde (suivant le moteur)
Compatibilité: Windows, MacOS, Linux (x86 et Raspberry Pi)
Dimensions: 38 x 27 x 11 mm
Poids: 5,1 g
Référence Pololu: 3133
![]()
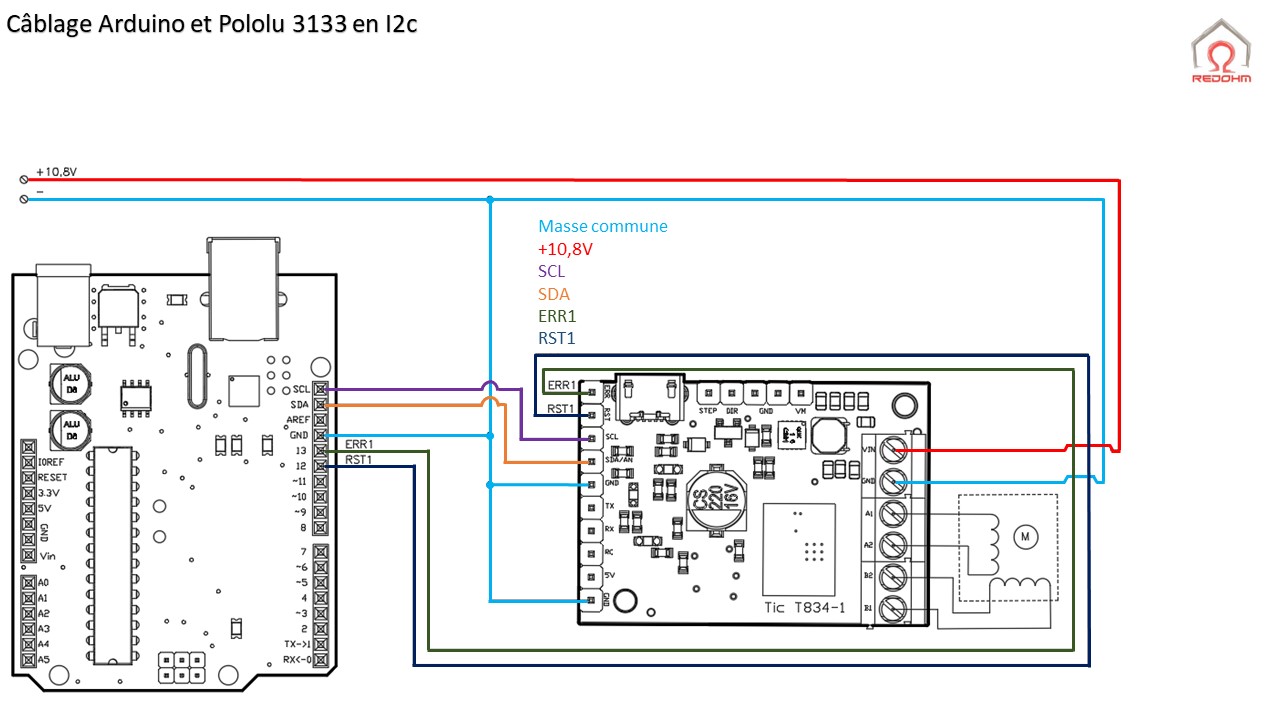
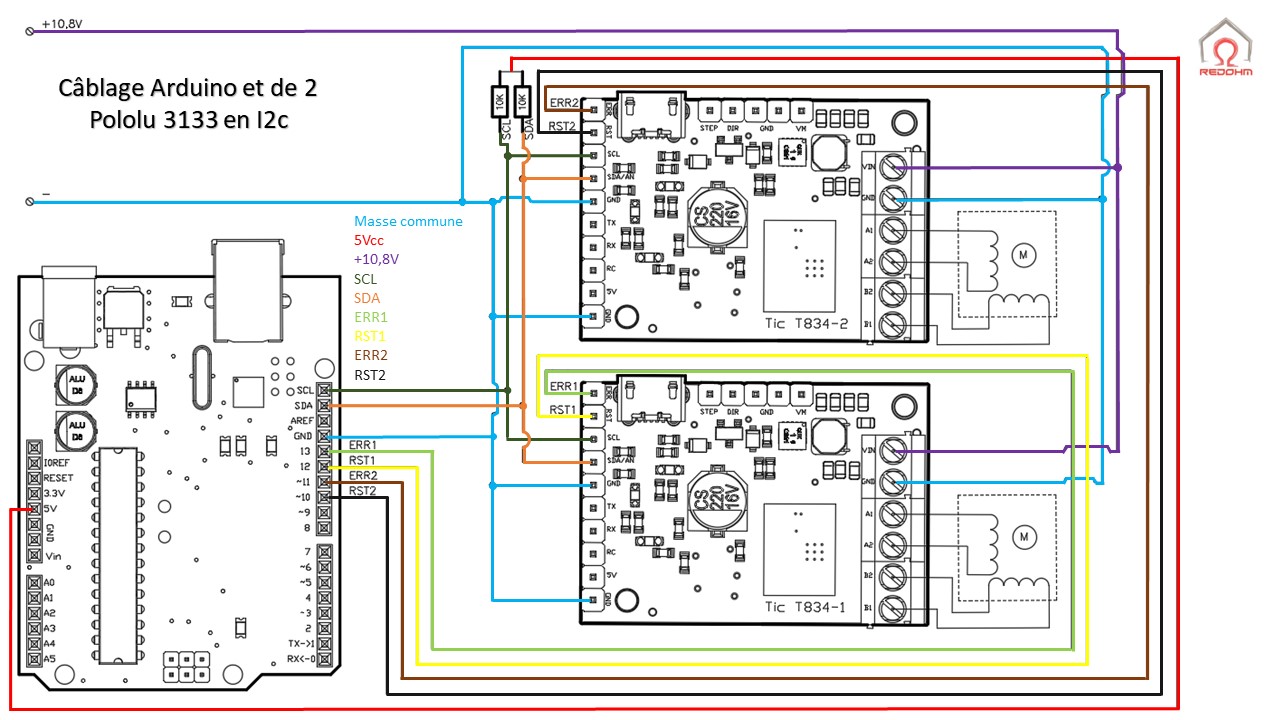
Schéma de cablage |
Cliquez sur la photo pour visualiser les schémas de câblage
![]()
Code et tuto Arduino
|
.
.
Code principal :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 |
// // //===================================================== // RedOhm // // Mise en service de la carte Pololu 3133 ou Tic T834 // Pilotage en I2c // // Lecture de la tension de service du driver // Lecture du courant de reglage // Mise sous tension par programme // deplacement du moteur dans les 2 sens // Pilotage de la deceleration // // Le 25/04/2022 // Herve Mazelin // // Documentation :https://pololu.github.io/tic-arduino //===================================================== // librairie pour le pilotage de la carte Pololu 3133 ou Tic T834 #include <Tic.h> // creation de l'objet tic TicI2C tic; // Connection du bouton poussoir à la broche d'entrée 4 int bouton_poussoir_bleu = 4; // Variable de lecture du bp bleu int val_bouton_poussoir_bleu ; // Connection du bouton poussoir à la broche d'entrée 5 int bouton_poussoir_rouge = 5; // Variable de lecture du bp rouge int val_bouton_poussoir_rouge ; // Un programme Arduino doit impérativement contenir cette fonction // Elle ne sera exécutee une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { delay (7000); // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. Serial.begin(9600); // on attent que le port de communication soit pret while (!Serial) { ; } // Configurer I2C.. Wire.begin(); // Donnez au Tic le temps de démarrer. delay(20); // En mode de contrôle série/I2C/USB, cette commande provoque // l'effacement de l'erreur de violation de démarrage sécurisé // pendant 200 ms. S'il n'y a pas d'autres erreurs, cela permet // au système de démarrer. tic.exitSafeStart(); // on déclare le bouton poussoir bleu en entrée pinMode ( bouton_poussoir_bleu , INPUT); // on déclare le bouton poussoir rouge en entrée pinMode ( bouton_poussoir_rouge , INPUT); // ======== Controle de la tension sur le driver // obtient la mesure actuelle de la tension VIN, en millivolts. // float:Déclare la variable tension_en_tic de type "virgule-flottante". float tension_en_tic = tic.getVinVoltage(); // transformation de la valeur de millivolts en volts tension_en_tic = tension_en_tic / 1000; // Affichage de la valeur de tension d'entrée du tic Serial.print ("Tension d'entrée driver Tic => "); Serial.print (tension_en_tic); Serial.println (" Volts"); // Obtient la limite de courant de la bobine du moteur pas à pas en milliampères. // float:Déclare la variable reglage_courant_moteur_tic de type "virgule-flottante". float reglage_courant_moteur_tic = tic.getCurrentLimit(); // transformation de la valeur de milliampéres en amperes reglage_courant_moteur_tic = reglage_courant_moteur_tic / 1000; // Affichage du reglage du courant du tic Serial.print ("Reglage courant moteur => "); Serial.print (reglage_courant_moteur_tic); Serial.println (" Ampere"); //Activation du driver tic.energize(); // Affichage de l'information de mise en activation du driver Serial.println ("Activation du driver "); // Création du ligne vide Serial.println (" "); } // ============= Fin du setup ================================== // Envoie une commande "Reset command timeout" au Tic. // Nous devons appeler ceci au moins une fois par seconde, // ou bien un délai d'attente de commande erreur se produira. // Délai d'expiration de la commande par défaut du Tic // est de 1000 ms, mais il peut être modifié ou désactivé // dans le Tic centre de contrôle. // Pour le tuto j'ai devalidé cette fonction dans tic Control Center void resetCommandTimeout() { tic.resetCommandTimeout(); } // Retarde le nombre spécifié de millisecondes afin // que son mouvement ne soit pas interrompu par des erreurs. void delayWhileResettingCommandTimeout(uint32_t ms) { uint32_t start = millis(); do { resetCommandTimeout(); } while ((uint32_t)(millis() - start) <= ms); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { val_bouton_poussoir_rouge = digitalRead (bouton_poussoir_rouge); if (val_bouton_poussoir_rouge == HIGH ) { rouge(); } val_bouton_poussoir_bleu = digitalRead (bouton_poussoir_bleu); if (val_bouton_poussoir_bleu == HIGH ) { bleu(); } } |
.
![]()
Onglet : 01_bleu
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
// // cycle bouton bleu void bleu() { Serial.println ("Demarrage cycle bouton bleu "); // Avance de 200 pas par seconde tic.setTargetVelocity(2000000); // pendant 5 secondes delayWhileResettingCommandTimeout(5000); // Décélérez jusqu'à l'arrêt. tic.setTargetVelocity(0); delayWhileResettingCommandTimeout(1000); // Déplacez-vous en sens inverse à 100 pas par seconde tic.setTargetVelocity(-1000000); // pendant 4 secondes. delayWhileResettingCommandTimeout(4000); // Décélérez jusqu'à l'arrêt. tic.setTargetVelocity(0); delayWhileResettingCommandTimeout(1000); // Avance de 400 pas par seconde tic.setTargetVelocity(4000000); // pendant 3 secondes delayWhileResettingCommandTimeout(3000); |
.
![]()
Onglet : 02_rouge
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
// // cycle bouton rouge void rouge() { Serial.println ("Demarrage cycle bouton rouge "); // Avance de 200 pas par seconde tic.setTargetVelocity(2000000); // pendant 2 secondes delayWhileResettingCommandTimeout(2000); // Décélérez jusqu'à l'arrêt. tic.setTargetVelocity(0); delayWhileResettingCommandTimeout(1000); // Déplacez-vous en sens inverse à 100 pas par seconde tic.setTargetVelocity(-1000000); // pendant 1 seconde. delayWhileResettingCommandTimeout(1000); // Décélérez jusqu'à l'arrêt. tic.setTargetVelocity(0); delayWhileResettingCommandTimeout(1000); } |
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
Nous avons mis aussi à votre disposition un groupe RedOhm sur Facebook ou vous trouverez un maximun de documentation technique .