
Mise à jour le 01/12/2019 : Article traitant du module laser LIDAR-Lite V3 de Garmin permettant de mesurer des distances de 0 à 40 m. Ce module communique avec un microcontrôleur type Arduino via une liaison PWM ou I2C..
Sommaire :
- Descriptif du capteur de distance Laser LIDAR-Lite 3
- L’améliorations du traitement des signaux offre des vitesses de mesure 5X plus rapides.
- Communications I2C améliorées
- Adressage I2C assignable par l’utilisateur
- Compatible avec le capteur original pour toutes les fonctions primaires
- Spécification du laser lidar lite 3
- Informations opérationnelles sur le laser
- Technologie du laser lidar-lite 3.
- Principe de fonctionnement
- Interface.
- Broche d’activation de l’alimentation
- Interface I2C
- Broche de contrôle de mode.
- Définitions détaillées du registre de contrôle.
- 0x00 : Commande de périphérique
- 0x01 : État du système
- 0x02 : Nombre d’acquisition maximal
- 0x04 : Contrôle du mode d’acquisition
- 0x09 : Sortie de mesure de vitesse
- 0x0c : Valeur maximale dans l’enregistrement de corrélation
- 0x0d : Niveau de bruit d’enregistrement de corrélation
- 0x0e : Puissance du signal reçu
- 0x0f : Mesure de distance octet haut
- 0x10 : Mesure de distance octet bas
- Information général des termes utilisés sur le laser :
- Schéma de cablage pour le laser
- Cablage pour une communication en i2c vers la carte Arduino
- Ou cablage en mode PWM vers la carte Arduino
- Programmation du module .
- Exemple de programme ( constructeur ) pour initialiser , configurer et lire le laser lidar pour la communication en I2C
- Lien utile pour le laser ou les accessoires
- A savoir sur l’utilisation des informations pour le laser lidar-lite 3
- Pour tout probléme
- A suivre cet article est mise à jour réguliérement
- Retour au menu tutoriel .
- Retour au menu construction d’une tourelle pour laser lidar
.
![]()
Descriptif du capteur de distance Laser LIDAR-Lite 3 |
.
Module laser LIDAR-Lite V3 de Garmin permettant de mesurer des distances de 0 à 40 m. Ce module communique avec un microcontrôleur type Arduino via une liaison PWM ou I2C.
Il est paramétrable pour obtenir un compromis entre précision, plage de mesure et temps d’acquisition. Il est compact, léger et économe en énergie. Applications: drones, robots, modélisme, etc.
Remarque: ce module utilise un laser de Classe 1, sans danger dans des conditions d’utilisation normales. Il est cependant recommandé de ne pas regarder directement le capteur de face.
Retour au sommaire.
L’améliorations du traitement des signaux offre des vitesses de mesure 5X plus rapides
Grâce à la mise en ouvre d’une nouvelle architecture de traitement du signal, le LIDAR-Lite va maintenant fonctionner à des vitesses de mesure allant jusqu’à 500 lectures par seconde, offrant une plus grande résolution pour des applications de numérisation.
Retour au sommaire.
Communications I2C améliorées
La communication I2C du LIDAR-Lite fonctionner à présent à 100 ou 400 kbits/s.
À présent largement compatible avec le plus simple des contrôleurs I2C et la plupart des cartes microcontrôleur. Au lieu des réponses « ACK » et « NACK » (accusés de réception positifs/négatifs), lorsque le capteur est disponible ou occupé, un registre d’états (0X01) peut être interrogé pour indiquer l’état du capteur.
La valeur de la mesure précédente peut être lue à tout moment lors d’une acquisition, jusqu’à ce qu’elle soit écrasée par une nouvelle valeur. Inutile d’attendre que le capteur soit disponible pour lire les données.
.
Retour au sommaire.
Adressage I2C assignable par l’utilisateur
Chaque capteur peut disposer d’une adresse I2C unique.
L’adresse de base de 0x62 peut être utilisée par défaut dans des applications de capteurs uniques et sera également disponible dans des applications multi-capteurs en tant qu’adresse de diffusion pour lancer une commande à tous les LIDAR-Lites sur le bus I2C.
.
Retour au sommaire.
Compatible avec le capteur original pour toutes les fonctions primaires
La compatibilité va se prolonger dans les futures versions et variantes du produit, à savoir, les capteurs à base de DEL, à longue portée ou les produits à taux de répétition élevé.
.
Retour au sommaire.
Spécification
![]()
Spécification du laser LIDAR-Lite 3 |
Caractéristiques physiques :
- Taille : 20mm x 48mm x 40mm
- Poids : 22 g (0,78 oz.)
- Température de fonctionnement : -20 to 60°C (-4 to 140°F)
Caractéristiques electrique :
- Tension nominal : 5Vcc
- Tension mini : 4.5Vcc
- Tension maxi : 5.5Vcc
- Consommation en courant :
- En veille : 105 mA
- En fonctionnement continu : 135 mA
Performance :
- Plage (cible réfléchissante à 70%) : 40 m
- Résolution : +/- 1 cm
- Précision : <5 m ± 2,5 cm typique ( Non-linéarité présente en dessous de 1 m )
- Précision : ≥ 5 m ± 10 cm typique
- Moyenne : ± 1% de la distance .
- Maximale Ondulation : ± 1% de distance maximale
- Taux de mise à jour : (cible réfléchissante à 70%) Mode rapide à 270 Hz typique à 650 Hz ( (Sensibilité réduite) > 1000 Hz à courte portée uniquement
- Taux de répétition : ~ 50 Hz par défaut 500 Hz max.
Interface :
- Interface utilisateur : I2C ou PWM Déclencheur externe
- Interface l2C : en mode rapide (400 kbit / s) Adresse 7 bits par défaut 0x62 Accès et contrôle au registre interne.
- Interface PWM :
- Entrée de déclenchement : externe
-
Sortie PWM : proportionnelle à la distance à 10 μs / cm
Laser :
- Longueur d’onde : 905 nm (nominale)
- Puissance totale du laser (pic) : 1,3 W
- Mode de fonctionnement : pulsé (train d’impulsions max. 256 impulsions)
- Largeur d’impulsion : 0,5 μs (cycle de service de 50%).
- Fréquence de répétition du train d’impulsions : 10-20 KHz nominale
- Energie par impulsion : <280 nJ
- Diamètre du faisceau à l’ouverture du laser : 12 × 2 mm (0,47 × 0,08 in)
- Divergence : 8 mradian
Réperage des connections :

Repérage des connections du laser
Rouge : 5 Vdc (+)
Orange : Power enable (mise à niveau interne)
Jaune : Contrôle du mode
Vert : I2C SCL
Bleu : SDA I2C
Noir : Terre (-)
Il existe deux configurations de base pour ce périphérique :
- I2C (circuit intégré): bus informatique série utilisé pour communiquer entre ce périphérique et un microcontrôleur, tel qu’une carte Arduino.
- PWM (modulation de largeur d’impulsion): méthode de transfert de signal bidirectionnel qui déclenche les acquisitions et renvoie les mesures de distance à l’aide de la broche de contrôle de mode.
.
Retour au sommaire![]()
Information opérationnelles sur le laser lidar |
Technologie du laser lidar-lite 3.
Cet appareil mesure la distance en calculant le délai entre l’émission d’un signal laser dans le proche infrarouge et sa réception après une réflexion sur une cible. Cela se traduit par une distance utilisant la vitesse de la lumière connue. Notre approche unique de traitement du signal transmet une signature codée et recherche cette signature dans le retour, ce qui permet une détection très efficace avec des niveaux de puissance laser sûrs pour les yeux. Des techniques exclusives de traitement du signal sont utilisées pour obtenir une sensibilité, une vitesse et une précision élevées dans un système de petite taille, à faible consommation d’énergie et à faible coût.
Retour au sommaire.
Principe de fonctionnement .
Principe de fonctionnement Pour prendre une mesure, cet appareil effectue d’abord une procédure de correction de polarisation du récepteur, corrigeant les variations de niveau de lumière ambiante et permettant une sensibilité maximale.
Ensuite, l’appareil envoie un signal de référence directement de l’émetteur au récepteur. Il enregistre la signature de transmission, définit le délai pour la distance «zéro» et recalcule ce délai périodiquement après plusieurs mesures.
Ensuite, l’appareil lance une mesure en effectuant une série d’acquisitions. Chaque acquisition est une transmission du signal laser principal tout en enregistrant le signal de retour sur le récepteur. S’il existe une correspondance de signal, le résultat est stocké en mémoire en tant qu’enregistrement de corrélation. La prochaine acquisition est additionnée au résultat précédent. Lorsqu’un objet situé à une certaine distance renvoie le signal laser au dispositif, ces acquisitions répétées font apparaître un pic hors du bruit à l’emplacement de distance correspondant dans l’enregistrement de corrélation.
L’appareil intègre les acquisitions jusqu’à ce que le pic de signal dans l’enregistrement de corrélation atteigne une valeur maximale. Si le signal renvoyé n’est pas suffisamment puissant pour que cela se produise, l’appareil s’arrête à un nombre d’acquisition maximal prédéterminé.
L’intensité du signal est calculée à partir de l’amplitude du pic d’enregistrement du signal et un seuil de signal valide est calculé à partir du bruit de fond. Si le pic est supérieur à ce seuil, la mesure est considérée comme valide et l’appareil calculera la distance, sinon il indiquera 1 cm. Au début de la mesure suivante, l’appareil efface l’enregistrement du signal et recommence la séquence.
.
Retour au sommaireInterface.
Initialisation à la mise sous tension ou à la réinitialisation, l’appareil effectue une séquence de test automatique et initialise tous les registres avec les valeurs par défaut. Après environ 22 ms, il est possible de prendre des mesures de distance avec l’interface I2C ou la broche de contrôle de mode.
Broche d’activation de l’alimentation
La broche d’activation utilise une résistance de rappel interne et peut être actionnée au zero volt pour couper l’alimentation de l’appareil.
Interface I2C
Cet appareil possède une interface série compatible I2C à 2 fils (reportez-vous à la spécification I2CBus, version 2.1, janvier 2000, disponible auprès de Philips Semiconductor). Il peut être connecté à un bus I2C en tant que périphérique esclave, sous le contrôle d’un périphérique maître I2C. Il prend en charge le transfert de données en mode rapide 400 kHz. Le bus I2C fonctionne en interne à 3,3 Vcc. Un sélecteur de niveau interne permet au bus de fonctionner à 5 Vcc maximum. Des résistances de rappel internes de 3 000 ohms assurent cette fonctionnalité et permettent une connexion simple à l’hôte I2C. Le périphérique a une adresse d’esclave 7 bits avec une valeur par défaut de 0x62. L’adresse I2C 8 bits effective est 0xC4 write et 0xC5 read. L’appareil ne répondra pas à un appel général. La prise en charge n’est pas fournie pour l’adressage 10 bits.
La définition du bit le plus significatif de l’octet d’adresse I2C sur un déclenche l’incrémentation automatique de l’adresse du registre avec des lectures ou des écritures successives au sein d’un transfert de bloc I2C. Ceci est couramment utilisé pour lire les deux octets d’une valeur de 16 bits dans un transfert et est utilisé dans l’exemple suivant.
La méthode la plus simple pour obtenir les résultats de mesure à partir de l’interface I2C est la suivante:
- Écrivez 0x04 pour enregistrer 0x00.
- Lisez le registre 0x01. Répétez l’opération jusqu’à ce que le bit 0 (LSB) passe à l’état bas.
- Lisez deux octets dans 0x8f (octet haut 0x0f puis octet bas 0x10) pour obtenir la distance mesurée en bits de 16 bits.
Broche de contrôle de mode
La broche de contrôle de mode fournit un moyen de déclencher des acquisitions et de renvoyer la distance mesurée via une modulation de largeur d’impulsion (PWM) sans avoir à utiliser l’interface I2C.
L’état inactif de la broche de contrôle de mode est haute impédance (High-Z). En tirant la broche de contrôle de mode sur le bas, une seule mesure est déclenchée et l’appareil réagit en actionnant la ligne la plus haute avec une durée d’impulsion proportionnelle à la distance mesurée à 10 μs / cm. Une résistance de terminaison de 1k ohm est requise pour éviter les conflits de bus.
Le dispositif actionne la broche de contrôle de mode à 3,3 Vcc. L’isolation de la diode permet à la broche de tolérer un maximum de 5 Vcc.
Comme indiqué dans le schéma de câblage de la carte Arduino pour un fonctionnement en PWM , une méthode de déclenchement simple consiste à utiliser une résistance de 1k ohm en série avec une broche de sortie hôte pour abaisser la broche de contrôle de mode afin de lancer une mesure, et une broche d’entrée hôte directement connectée au moniteur. la largeur d’impulsion de sortie faible à élevée.
Si la broche de contrôle de mode est maintenue basse, le processus d’acquisition se répète indéfiniment, produisant une sortie à fréquence variable proportionnelle à la distance.
Le comportement des broches de contrôle de mode peut être modifié à l’aide du registre I2C ACQ_CONFIG_REG (0x04), comme indiqué dans la section 0x04 (voir la definitions du registre de controle).
Retour au sommaire.
![]()
Définitions détaillées du registre de contrôle. |
REMARQUE : Sauf indication contraire, tous les registres contiennent un octet et sont en lecture et en écriture.
0x00
| R/W | Nom | Description | Valeur initiale |
| W | ACQ_COMMAND | Commande de périphérique – |
| Bit | Fonction | ||
| 7.0 | Write 0x00: Reset FPGA, tous les registres reviennent aux valeurs par défaut | ||
| Write 0x03: Prendre une mesure de distance sans correction de biais du récepteur |
|||
| Write 0x04: Prendre une mesure de distance avec correction de biais du récepteur | |||
.
Retour au sommaire0x01
| R/W | Nom | Description | Valeur initiale |
| R | STATUT | État du système |
| Bit | Fonction | ||
| 6 |
Indicateur d’erreur de processus |
||
| 5 |
Drapeau d’etat |
||
| 4 |
Indicateur de retour secondaire |
||
| 3 |
Drapeau de signal invalide |
||
| 2 |
Indicateur de débordement du signal |
||
| 1 |
Indicateur de dépassement de référence |
||
| 0 |
Drapeau occupé |
||
.
Retour au sommaire0x02
| R/W | Nom | Description | Valeur initiale |
| R/W | SIG_COUNT_VAL | Nombre d’acquisition maximal | 0x80 |
| Bit | Fonction |
| 7.0 | Nombre maximum d’acquisitions pendant la mesure |
.
Retour au sommaire0x04
| R/W | Nom | Description | Valeur initiale |
| R/W | ACQ_CONFIG_REG | Contrôle du mode d’acquisition | 0x08 |
| Bit | Fonction |
| 6 |
0 : Activer le processus de référence pendant la mesure |
| 5 |
0 : Utiliser le délai par défaut pour les modes rafale et libre. |
| 4 |
0 : Activer le filtre de référence, moyenne de 8 mesures de référence pour une cohérence accrue. |
| 3 |
0 : Activer la terminaison rapide de mesure. L’appareil mettra fin à la mesure de distance plus tôt s’il prévoit que la crête du signal dans l’enregistrement de corrélation atteindra sa valeur maximale. |
| 2 |
0 : Utiliser le nombre d’acquisition de référence par défaut de 5. |
| 1.0 |
Commande de fonction de sélection de mode de mode |
.
Retour au sommaire0x09
| R/W | Nom | Description | Valeur initiale |
| R/W | ACQ_CONFIG_REG | Sortie de mesure de vitesse | __ |
| Bit | Fonction |
| 7.0 |
Sortie de mesure de vitesse. Différence entre la mesure actuelle et la précédente, valeur signée (complément à 2) en centimètres. |
.
Retour au sommaire0x0c
| R/W | Nom | Description | Valeur initiale |
| R | PEAK_CORR | Valeur maximale dans l’enregistrement de corrélation | _ |
| Bit | Fonction |
| 7.0 | La valeur du pic le plus élevé dans l’enregistrement de corrélation. |
.
Retour au sommaire0x0d
| R/W | Nom | Description | Valeur initiale |
| R | NOISE_PEAK | Niveau de bruit d’enregistrement de corrélation | _ |
| Bit | Fonction |
| 7.0 | Une mesure du bruit dans l’enregistrement de corrélation. Sera légèrement au-dessus du troisième plus haut pic. |
.
Retour au sommaire.
0x0e
| R/W | Nom | Description | Valeur initiale |
| R | SIGNAL_STRENGTH | Puissance du signal reçu | _ |
| Bit | Fonction |
| 7.0 | Puissance du signal reçu calculée à partir de la valeur du pic le plus élevé de l’enregistrement de corrélation et du nombre d’acquisitions réalisées. |
![]()
Information général des termes utilisés sur le laser . |
Energie par impulsion
La puissance se définit classiquement comme la quantité d’énergie émise par unité de temps. Un laser délivrant un joule pendant une seconde aura une puissance d’un watt.
Dans le cas de lasers impulsionnels, il faut distinguer la puissance moyenne délivrée, qui tient compte des intervalles de temps entre chaque impulsion et la puissance de crête, qui est la puissance atteinte lors d’une l’impulsion.
Ainsi, un laser d’un watt délivrant sa lumière de façon continue aura une puissance d’un watt ; mais s’il concentre une énergie d’un joule en une décharge lumineuse d’une milliseconde, sa puissance de crête va être multipliée par mille et atteindra un kilowatt.
En délivrant leur énergie sur des temps très courts (nanoseconde voire picoseconde ou même femtoseconde), certains lasers d’étude peuvent atteindre des puissances de crête extrêmement élevées (jusqu’à 10 petawatts).
La divergence
La divergence du faisceau décrit l’élargissement du faisceau sur la distance. Elle est définie en milli-radiant (mrad), qui décrit généralement une partie du cercle circonscrit.
En général, il est préférable d’avoir une divergence aussi faible que possible.
La divergence du faisceau est en relation directe avec la taille du faisceau en sortie de module : en augmentant la taille du faisceau à la sortie, il est possible de réduire la divergence – et vice versa. Cela est possible dans une certaine mesure, en fonction de la technologie laser utilisée.
.
Retour au sommaire![]()
Schéma de cablage pour le laser lidar lite 3
|
Cablage pour la communication en I2C avec le laser
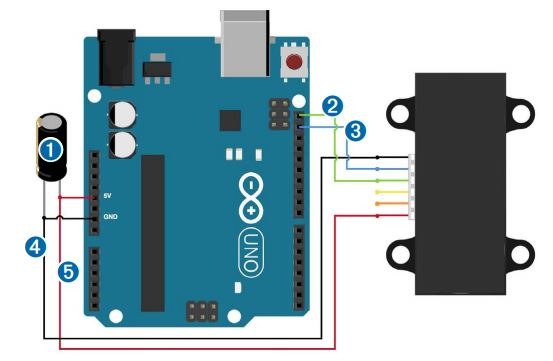
Schema de cablage du laser pour le cablage de I2c pour le LIDAR-Lite 3
.
- Condensateur électrolytique 680µF Respectez la polarité lors de l’installation du condensateur.
- Connexion SCL I2C fil vert ( Signal d’horloge )
- Connexion SDA I2C Fil bleu ( Signal de donnée )
- Connexion à la terre (-) connexion Fil noir
- Power Connexion 5 Vdc (+) Fil rouge le capteur fonctionne entre 4,75 et 5,5 Vdc, avec une tension max. de 6 Vdc.
.
Retour au sommaire![]()
Schéma de cablage pour le laser lidar lite 3
|
.
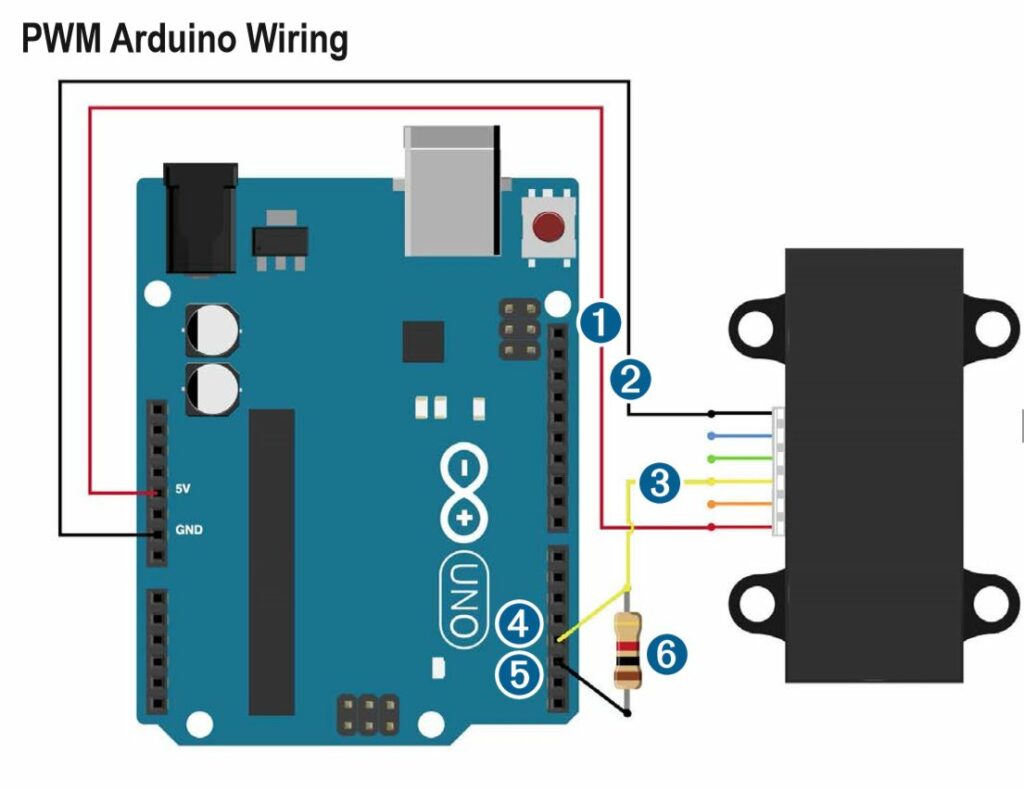
Interface en PWM
.
- Branchement électrique 5 Vcc (+) : Fil rouge . Le capteur fonctionne entre 4,75 et 5,5 Vcc, avec une tension max. de 6 Vdc.
- Connexion à la terre (-) : Fil noir.
- Connexion pour le choix du mode : Fil jaune.
- Broche de surveillance sur le microcontrôleur : Connectez l’un des côtés de la résistance à la connexion Modecontrol de l’appareil et à une broche de surveillance de votre microcontrôleur.
- Broche ou pin de déclenchement sur le microcontrôleur : Connectez l’autre côté de la résistance à la broche de déclenchement de votre microcontrôleur.
- Resistance de 1kΩ
.
Retour au sommaire![]()
Exemple de programme ( constructeur )
|
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 |
// // // //------------------------------------------------------------------------------ // // // LIDARLite Arduino Library // v3/GetDistanceI2c // // Cet exemple montre comment initialiser ,configurer et lire la distance d’un // laser LIDAR-Lite connecté via l'interface I2C. // // Connections: // LIDAR-Lite 5 Vdc (red) vers la carte Arduino Power Connexion // 5 Vdc (+) Fil rouge Le capteur fonctionne // entre 4,75 et 5,5 Vdc, avec une tension max. de 6 Vdc. // // du laser LIDAR-Lite I2C SCL (vert) vers la carte Arduino Connexion // SCL I2C fil vert (Signal d’horloge) // // du LIDAR-Lite I2C SDA (bleu) vers la carte Arduino Connexion SDA I2C // Fil bleu (Signal de donnée) // // du laser LIDAR-Lite masse (noir) vers la carte Arduino // Connexion à la terre (-) connexion Fil noir // // ----------------- // (Le condensateur est recommandé pour atténuer le courant d'appel // lorsque le périphérique est activé) // condensateur 680uF (+) vers Arduino 5v ( le positif ) // condensateur 680uF (-) vers Arduino GND ( la masse ) // // Programme constructeur // Traduit par RedOhm et completer en commentaire // Arduino IDE 1.8.5 // // // // Voir le manuel d'utilisation pour les schémas de câblage et plus d'informations: // http://www.robotshop.com/media/files/pdf2/pli-06-instruction.pdf // //------------------------------------------------------------------------------ // je charge la bibliothèque qui vous permet de communiquer // avec les composants utilisant le protocole I2C #include <Wire.h> // je charge la bibliothèque qui permet de gerer // le laser LIDAR-Lite #include <LIDARLite.h> LIDARLite myLidarLite; // --------------------------------------------------------------------------- // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // --------------------------------------------------------------------------- void setup() { //Ouvre le port série et fixe le debit de communication à 115200 bauds Serial.begin(115200); /* begin(int configuration, bool fasti2c, char lidarliteAddress) Démarre le capteur et la communication I2C. Parameters ---------------------------------------------------------------------------- configuration: par defaut = 0. Sélectionne l'une des configurations prédéfinies. fasti2c: par defaut 100 kHz. I2C fréquence de base. Si la frequence I2C est defini sur 400kHz. lidarliteAddress: par défaut. 0x62. Remplissez la nouvelle adresse ici si changé. Voir le manuel d'utilisation pour les instructions. */ myLidarLite.begin(0, true); // Définir la configuration par défaut et I2C sur 400 kHz /* configure(int configuration, char lidarliteAddress) Sélectionnez l'une des configurations prédéfinies. Parameters ---------------------------------------------------------------------------- configuration: par defaut = 0. 0: Mode par défaut, performances équilibrées. 1: Courte portée, haute vitesse. Utilise le nombre maximal d'acquisitions 0x1d. 2: Plage par défaut, plage courte vitesse plus élevée. Active la résiliation rapide de détection pour des mesures plus rapides à courte portée (avec diminution précision) 3: Portée maximale. Utilise le nombre maximal d'acquisitions 0xff. 4: Détection de haute sensibilité. Remplace la détection de mesure valide par défaut algorithme et utilise une valeur de seuil pour une sensibilité et un bruit élevés. 5: Détection de faible sensibilité. Remplace la détection de mesure valide par défaut algorithme, et utilise une valeur de seuil pour la faible sensibilité et le bruit. lidarliteAddress: 0x62 par défaut. Remplissez la nouvelle adresse ici si changé. Voir manuel d'utilisation pour les instructions. */ myLidarLite.configure(0); // Changez ce nombre pour essayer d'autres configurations } void loop() { // //distance(bool biasCorrection, char lidarliteAddress) // //Prenez une mesure de distance et lisez le résultat. // //Parameters //---------------------------------------------------------------------------- //biasCorrection: Vrai par défaut. Prendre l'acquisition avec biais du récepteur //correction. Si la valeur est fausse, les mesures seront plus rapides.biasReceiver bias //la correction doit être effectuée périodiquement. (e.g. 1 sur chaque 100 //lectures). //lidarliteAddress: Default 0x62. Remplissez la nouvelle adresse ici si changé. //voir le manuel d'utilisation pour les instructions. // //Prenez une mesure avec correction du biais du récepteur et affichez-le //sur un terminal série Serial.println(myLidarLite.distance()); // Prenez 99 mesures sans correction de biais du récepteur et affichez // sur le terminal série for(int i = 0; i < 99; i++) { Serial.println(myLidarLite.distance(false)); } } |
Retour au sommaire
.
![]()
Lien utile pour le laser lidar lite 3 |
Fournisseur : https://www.robotshop.com
Information technique :
- www.laserworld.fr la divergence
- http://www.cea.fr. pour la definition de l’Energie par impulsion.
- www.robotshops . pour les information technique constructeur en Anglais
Retour au sommaire
.
![]()
A savoir sur l’utilisation des informations pour le laser lidar lite 3 |
A savoir sur l’utilisation des informations :
Les informations sur les caractéristiques et spécificités du capteur lidar lite 3 qui sont fournis sur cette page correspondent aux informations des fiches techniques du constructeur si malgré le soin apporté à la réalisation de cet article une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable.
Les programmes , schémas et autres que ceux donnés par le constructeur font parti des montages utiles à nos applications si malgré le soin apporté à nos montages une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable .
L’ensemble des informations techniques de cet article a été utilisé pour nos applications, elles vous sont fournies comme un exemple de document de travail. Mais nous ne pourrions être tenu responsables d’une mauvaise utilisation de celle-ci.
Retour au sommaire.
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire