
–
Mise à jour le 12/01/2019 – Rubrique traitant du module Kangaroo x2 qui permet de raccorder des encodeurs et des fins de course aux commandes de moteurs SyRen et Sabertooth de Dimension Engineering. Il accepte jusqu’à 2 encodeurs à quadrature ou potentiomètres et se fixe directement sur les borniers des SyRen ou Sabertooth.
Sommaire :
- Description du module Kangaroo x2
- Définition des différents réglage du module
- Contrôle de position avec maintient de puissance .
- Limitation de vitesse.( en cours d ‘essai )
- Limitation de vitesse maximale du système
- Mode mixte pour commande différentielle .
- Retour d’information pour le module Kangaroo
- En cours de réalisation
Retour au sommaire
![]()
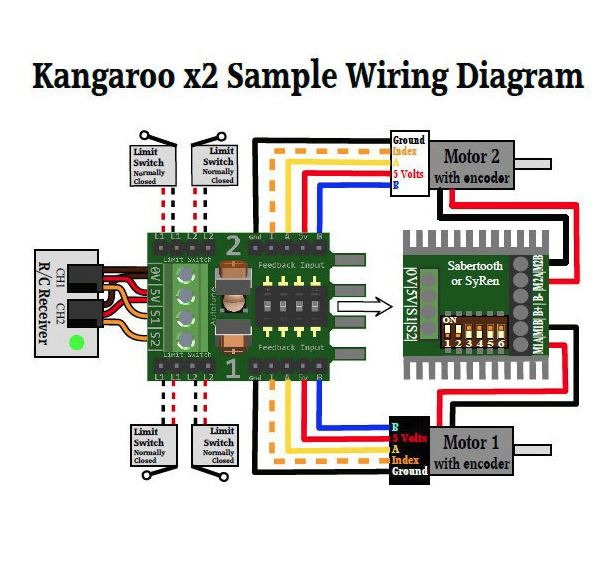
Description du module Kangaroo x2 |
Le grand avantage de ce module est qu’il est auto-réglable, il suffit de presser quelques boutons et régler un commutateur dip-switch. Le Kangaroo x2 fonctionne avec des sources analogiques ou RC mais aussi avec des microcontrôleurs ou ordinateurs.
Vous pouvez commander la vitesse, la positions ou des commandes combinées telles que « aller à 5 mètres à une vitesse de 3 m/s ». Vous pouvez également connaître les vitesse et position pendant le fonctionnement de votre robot.
Caractéristiques et spécificités.
- 2 contrôleurs PID à auto-tuning.
- Contrôle de vitesse ou de position.
- Feedback pour encodeur ou potentiomètres
- Entrées pour fins de course
- Entrées analogiques, RC et série
Définition des différents réglage du module |
Contrôle de position :
Si le module Kangaroo est configuré pour le contrôle de position, il commandera directement la position de la sortie du mécanisme, même si une charge est placée sur le mécanisme, le module appliquera autant de puissance qui est nécessaire pour garder l’appareil dans la position commandée. En changeant les commandes de position, vous pouvez faire bouger ou arrêter l’appareil de manière contrôlée.
Si le commutateur DIP 3 est réglé sur ON, le module Kangaroo est en mode de contrôle de position. Vous pouvez utiliser des tensions analogiques, R / C signaux de type servo ou commandes série pour définir la position. Vous pouvez changer de position pour contrôler la vitesse à tout moment. Il ne nécessite pas de ré-réglage ou de redémarrage
.
Retour au sommaire.
Limitation de vitesse :
En attente
Mode mixte :
Le réglage du commutateur DIP 4 sur OFF sélectionne le mode mixte. Ce type de fonctionnement est utile pour les robots mobiles à commande différentielle.Dans ce mode, au lieu d’avoir un contrôle indépendant du moteur 1 et du moteur 2, il y a un canal Drive and Turn. Le système syntonisera les deux moteurs en même temps. Ce type de fonctionnement est très utile pour les robots possédant 4 roues motrices
Contrôle de vitesse :
Si le Kangaroo est configuré pour le contrôle de la vitesse, ce système fonctionne comme le régulateur de votre voiture. Ce mode de réglage de vitesse est un dispositif pouvant équiper vos robots, conçu pour stabiliser la vitesse de celui-ci automatiquement ou à fixer une vitesse maximale à ne pas dépasser. L’opérateur fixe la vitesse à laquelle il veut rouler et l’électronique du dispositif gère le régime de rotation des moteurs pour maintenir la vitesse définie quel que soit la nature du terrain
Les exemples de dispositifs dont la vitesse est contrôlée incluent :
- Régulateur de vitesse dans une voiture
- Broches dans les machines CNC
- Robots mobiles
En utilisant le contrôle de la vitesse plutôt que de contrôler directement la puissance de sortie, comme vous le feriez avec un Sabertooth standard ,vous pouvez contrôler des vitesses plus basse avec de bons résultats . L’avantage aussi d’utiliser ce module à basse vitesse est de pouvoir réguler plus facilement la puissance du moteur pour éviter une perte de couple. Si le commutateur DIP 3 est réglé sur OFF, Kangaroo x2 est en mode de contrôle de vitesse, vous pouvez donc utiliser une tension analogique ou un signal venant d’une radiocommande RC.
Limitation de vitesse maximale du système

Pendant le réglage, le Kangaroo détermine la vitesse maximale du système. Le potentiomètre de limitation de vitesse intégré peut être utilisé pour définir la vitesse max du système. Un exemple concret d’utilisation de ce réglage, je définis de 75 % le maximum de vitesse ce qui permet au système d’avoir un peu de marge lorsque l’on franchit éventuellement des inclinaisons importantes .
Mode mixte pour commande différentielle
Le réglage du commutateur DIP 4 sur OFF sélectionne le mode mixte. Ceci est utile pour le réglage des robots mobiles à commande différentielle
Retour d’information pour le module Kangaroo
Kangaroo x2 nécessite un capteur indiquant au contrôleur où se trouve le périphérique et à quelle vitesse il va. Ce signal de capteur est appelé rétroaction. Kangaroo supporte deux types de capteurs différents , ou 2 encodeurs de quadrature qui fournit un retour odométrique ou 2 potentiomètres suivant l’application .
A savoir sur l’odométrie :
- L’odométrie est une technique permettant d’estimer la position d’un véhicule en mouvement. Cette mesure de bas niveau est présente sur quasiment tous les robots mobiles, grâce à des capteurs embarqués permettant de mesurer le déplacement du robot (de ses roues).
- L’odométrie repose sur la mesure individuelle des déplacements des roues pour reconstituer le mouvement global du robot. En partant d’une position initiale connue et en intégrant les déplacements mesurés, on peut ainsi calculer à chaque instant la position courante du véhicule.
Encodeur de quadrature
Un encodeur est un dispositif électromécanique capable de mesurer le mouvement ou la position. La plupart des encodeurs utilisent des capteurs optiques pour fournir des signaux électriques sous forme de trains d’impulsions, lesquels peuvent, à leur tour, être interprétés comme mouvement, direction ou position.
Les encodeurs rotatifs servent à mesurer le déplacement rotatif d’un axe.
Le disque, monté sur l’axe rotatif, comporte des motifs encodés de secteurs opaques et transparents. Lorsque le disque tourne, les segments opaques bloquent la lumière alors que ceux où le verre est clair la laissent passer. Ceci génère des impulsions d’onde carrée qui peuvent ensuite être interprétées comme position ou mouvement.
Un encodeur ne générant qu’une série d’impulsions ne serait pas très utile puisqu’il ne pourrait pas indiquer la direction de la rotation. L’encodeur en quadrature comporte deux pistes de code dont les secteurs sont décalés de 90 degrés d’une piste à l’autre, ceci permet d’avoir deux sorties de voie qui indiquent la position et la direction de la rotation. Si A devance B, par exemple, le disque tourne dans le sens des aiguilles d’une montre. Si B devance A, le disque tourne dans le sens contraire. Par conséquent, en surveillant à la fois le nombre d’impulsions et les phases relatives des signaux A et B, vous pouvez suivre la position et la direction de la rotation.Le module Kangaroo x2 fournit une variété de connexion de démarrage automatique pour les encodeurs, tels que les fins de course, les index impulsions et les arrêts mécaniques.
Potentiomètre
En conséquence, ils sont prêts à fonctionner dès qu’ils sont sous tension, sans prise de référence ou démarrage nécessaire. L’inconvénient majeur de l’utilisation de potentiomètres en retour est qu’ils sont limités dans leur plage de rotation, ils ne sont donc appropriés que pour certains systèmes.