
Mise à jour le 29/06/2019: Retrouvez sur cette page l’ensemble des articles concernant le robot Spider S12-PC ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
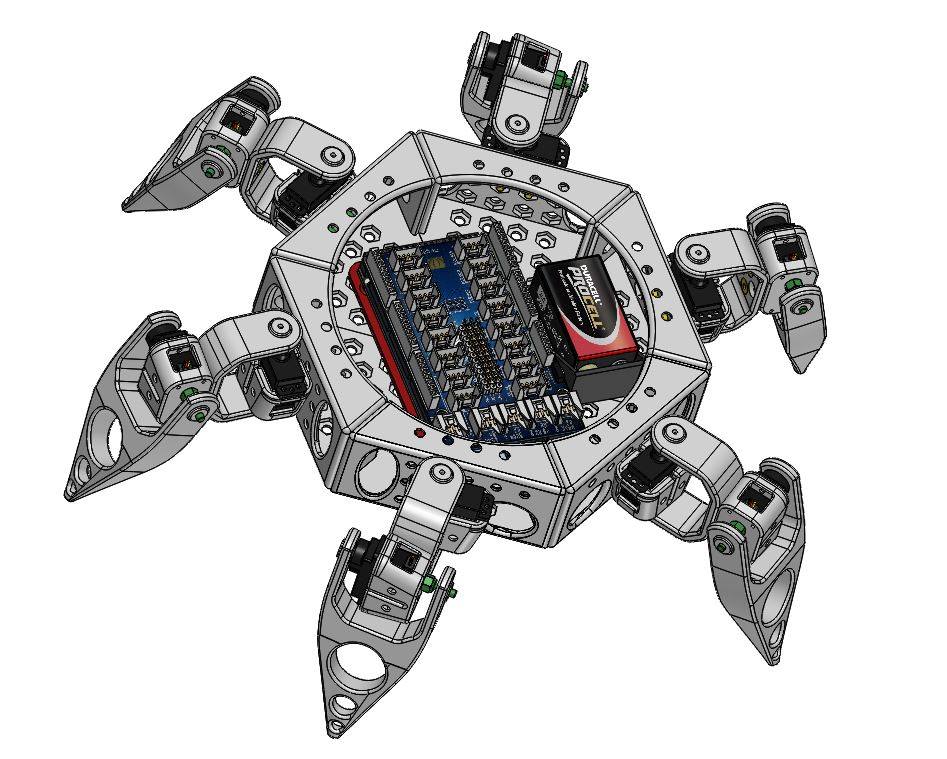
Mini Spider S12 patte courte Version 02022017 – RedOhm
Sommaire :
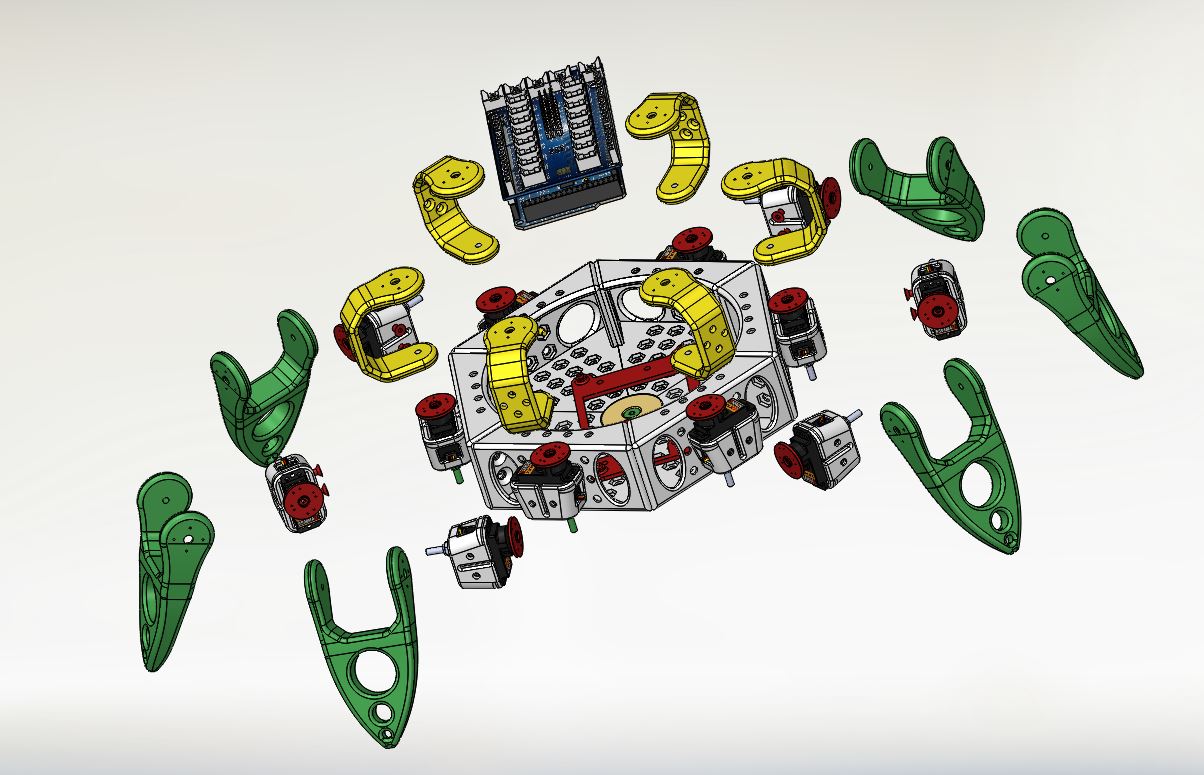
- Version 1.00 ou Version 02-02-2017. Vue éclatée de mini Spider S12-PC pour le choix des pièce , ensemble des fichiers à télécharger .
- Version 09-02-2017 .Vue éclatée de mini Spider S12-PC pour le choix des pièce ensemble des fichiers à télécharger . ( Cette version est conseillée pour les néophytes de l’impression 3D ) .
- Fichier pour le porte batterie et capot
- Repérage des numéros des servomoteurs .
- Divers programmes .
- Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur ).
- Programme d’initialisation de mini-spider et un petit bonjour
- Programme d’enchaînement de divers sous programme ( Initialisation spider , petit bonjour , position d’attaque de Spider ,rotation de Spider)
- Explication de l’alimentation des servomoteurs.
- Présentation de Mr le régulateur 7806 en boitier TO220.
- Retour au menu nos robots
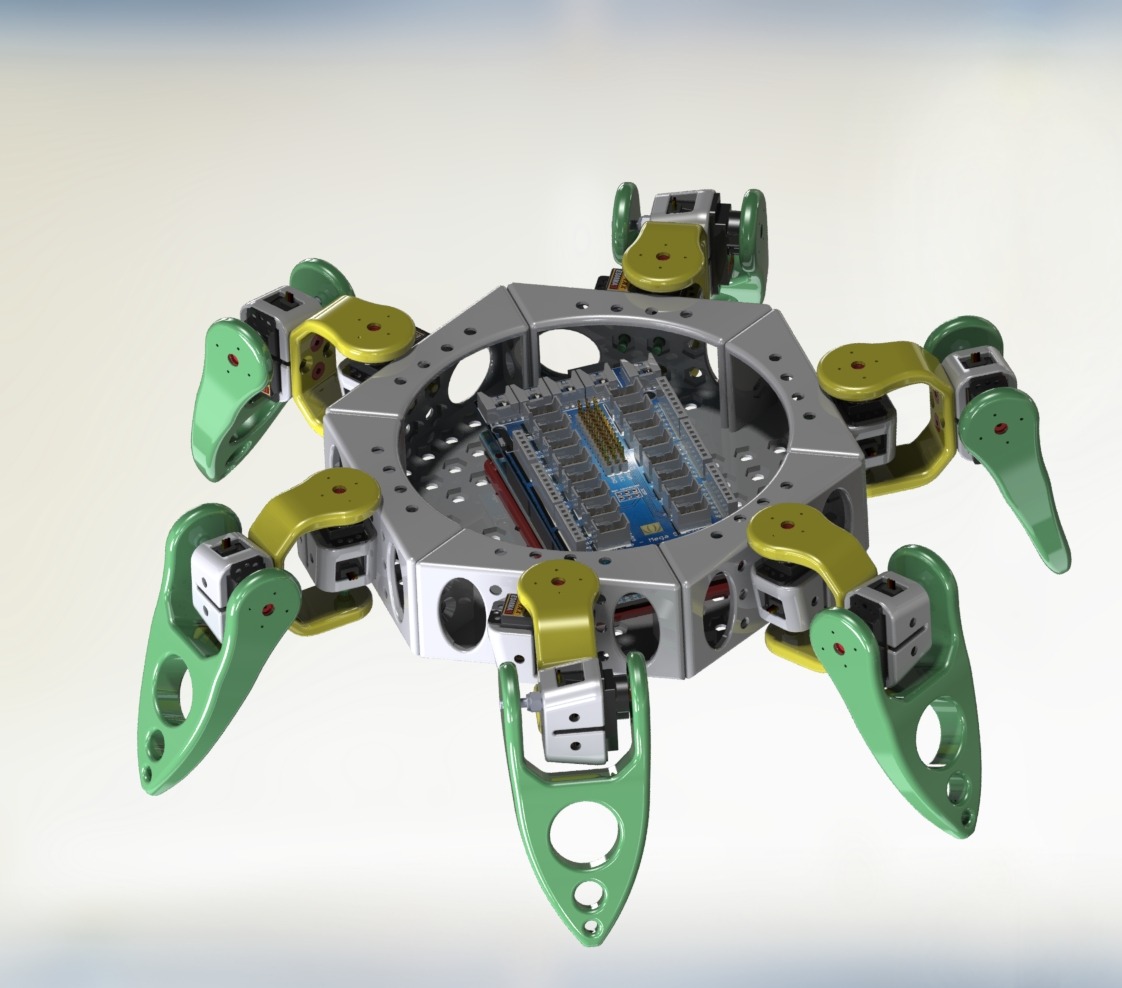
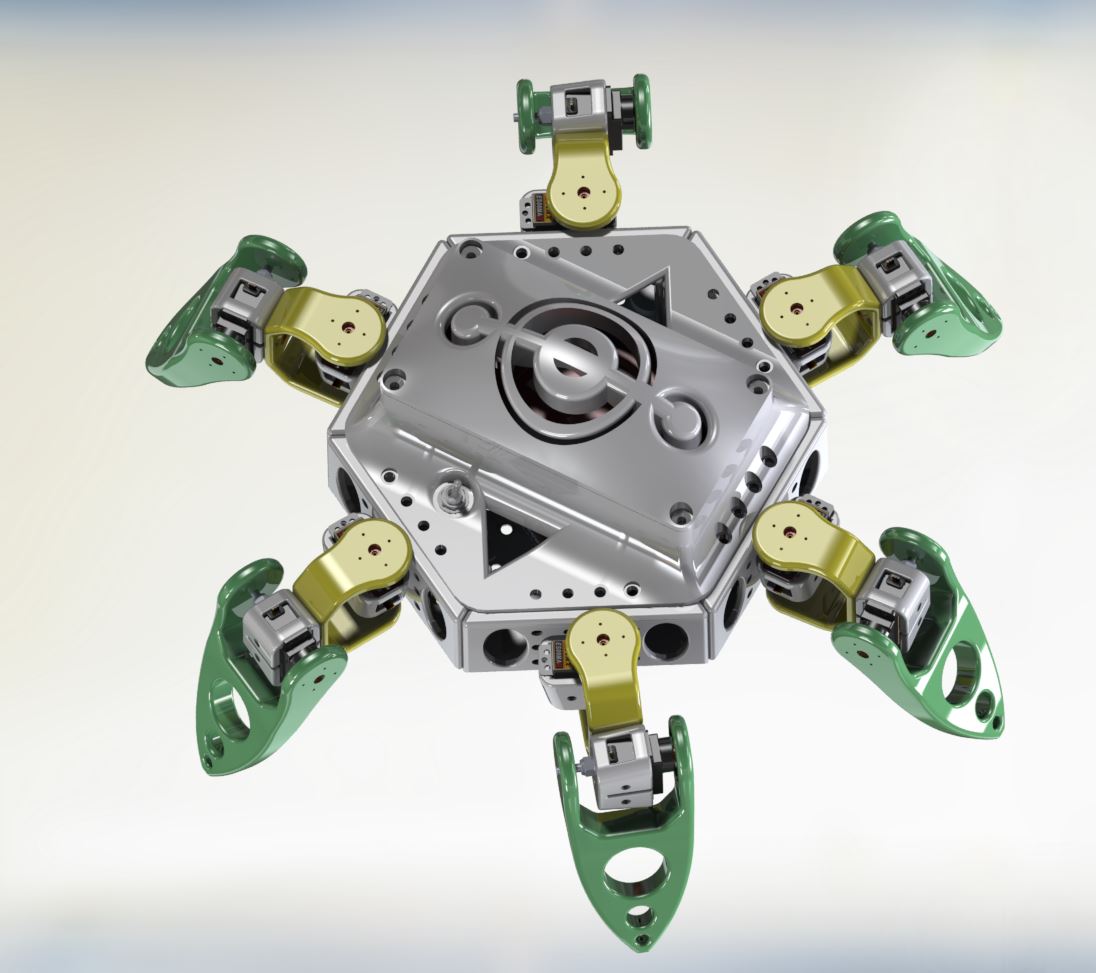
Vue éclatée de mini Spider S12-PC et l’ensemble des fichiers à télécharger . Version 1.00 |

Vue éclatée de mini Spider S12 Version 1.00 – RedOhm
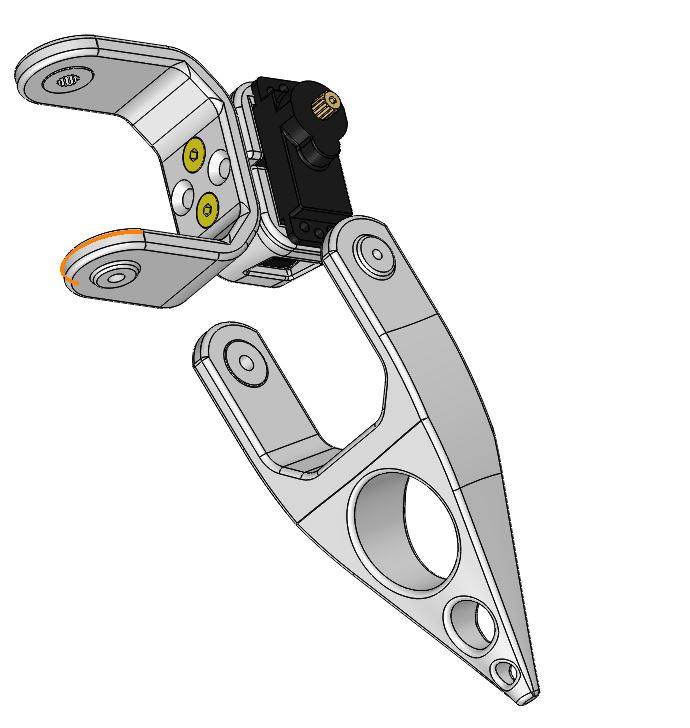
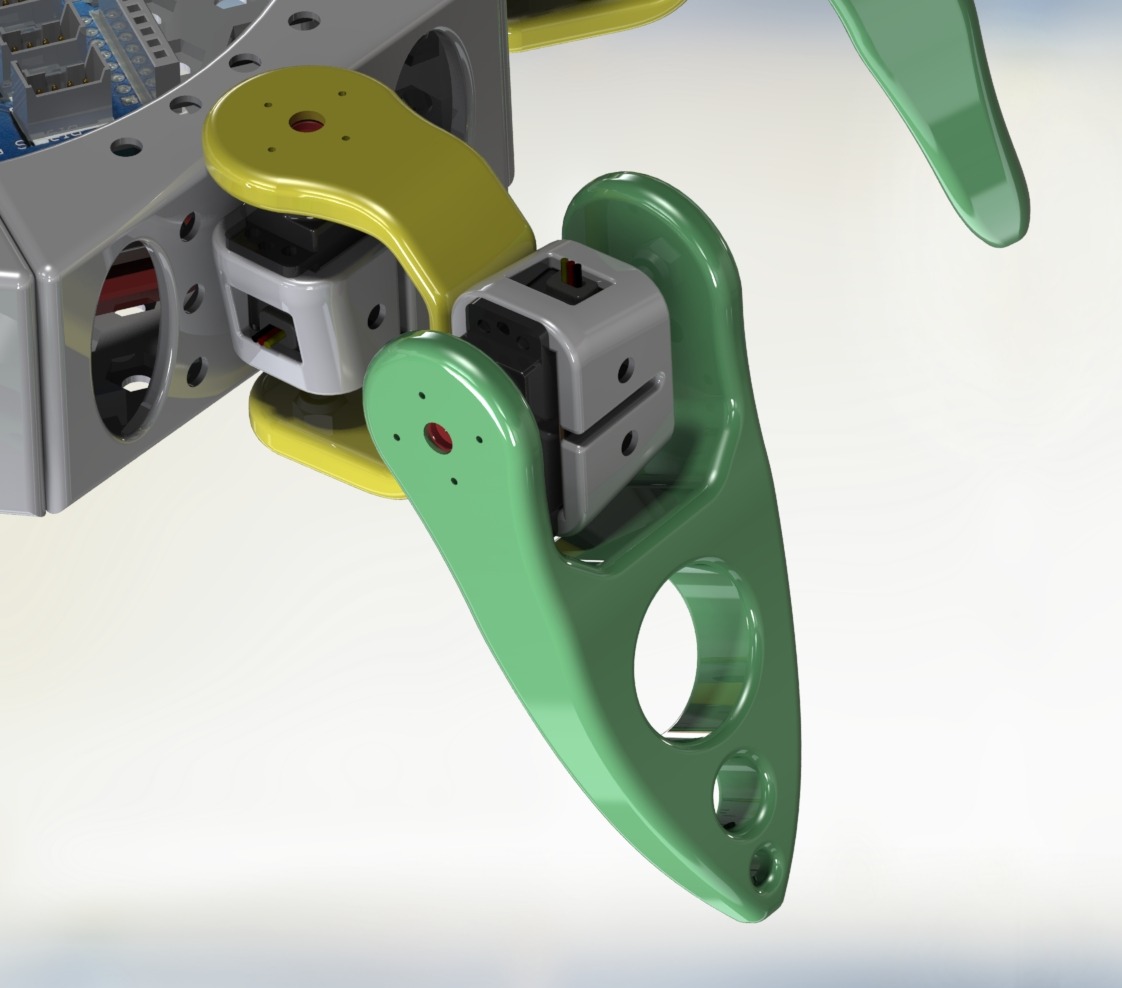
Vue de la patte et de son servomoteur – RedOhm –
Ensemble des fichiers à télécharger pour imprimer Spider version 1.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
–
Retour au sommaire.
![]()
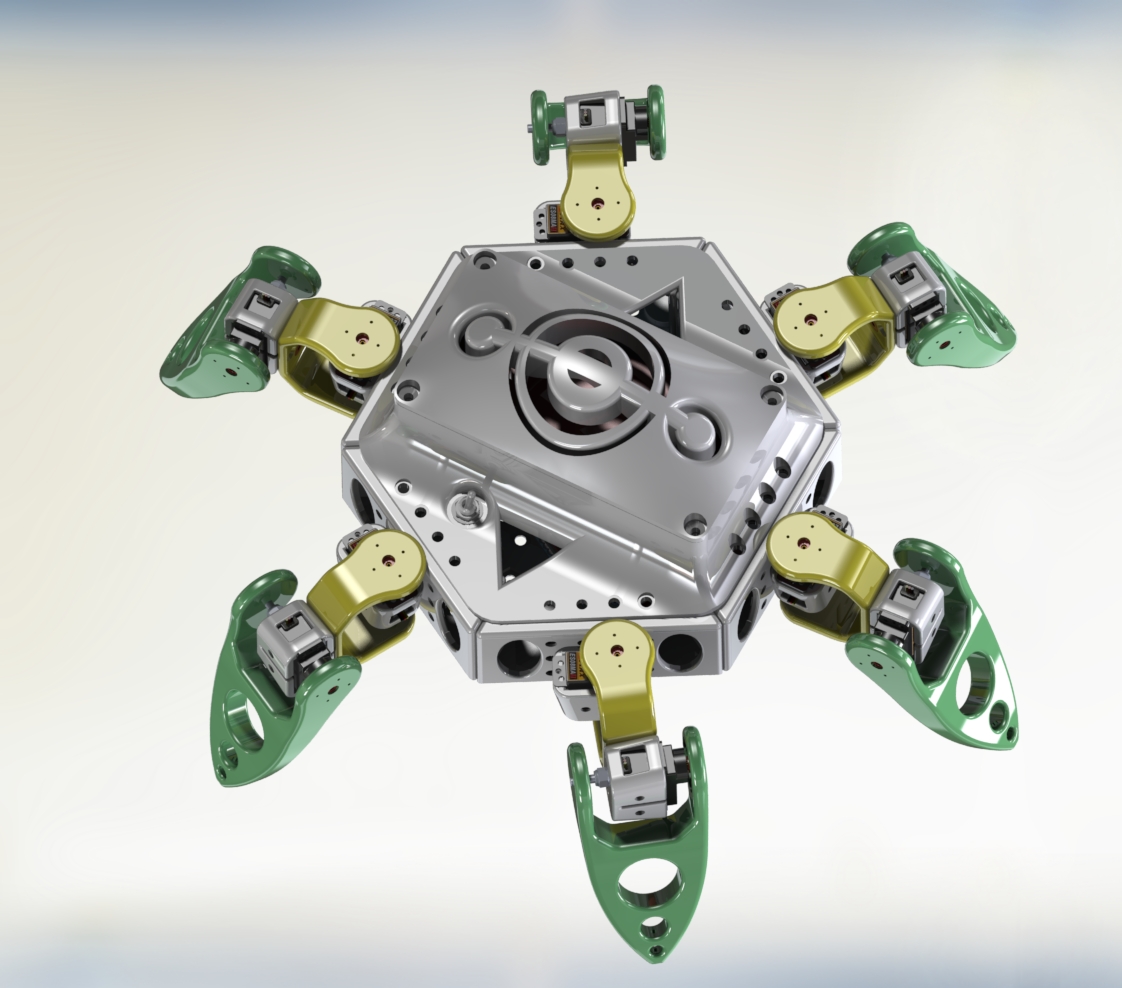
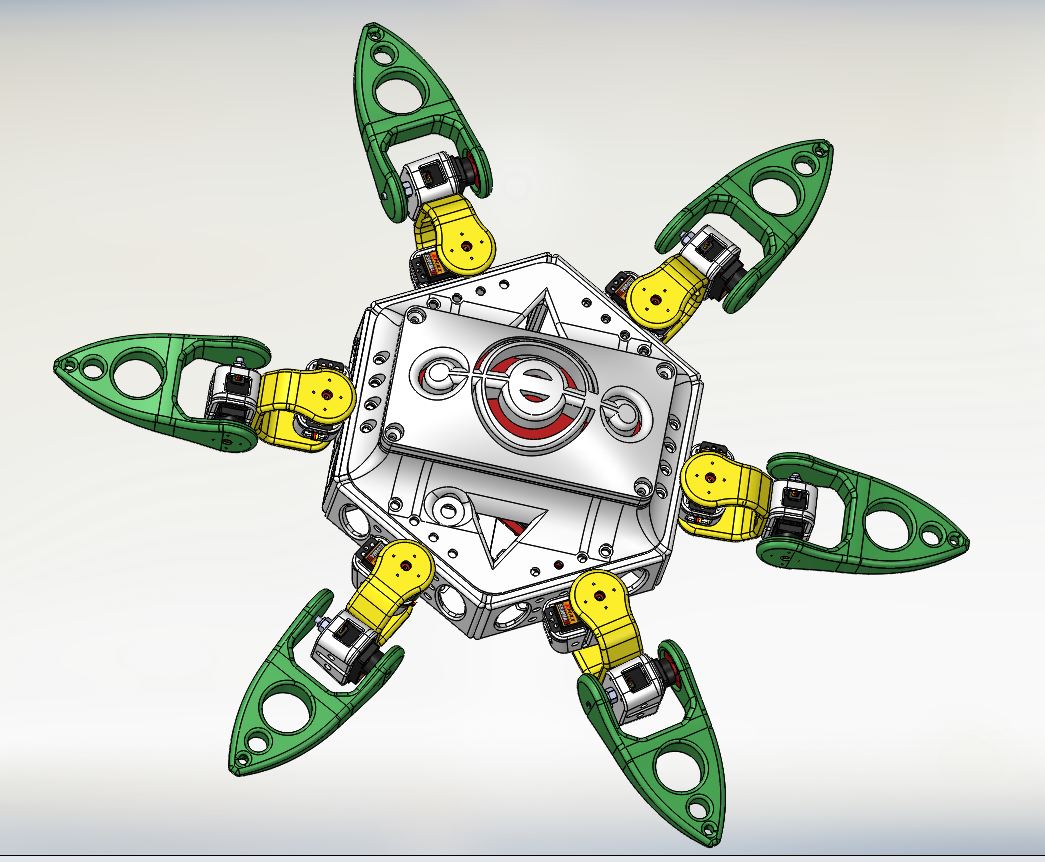
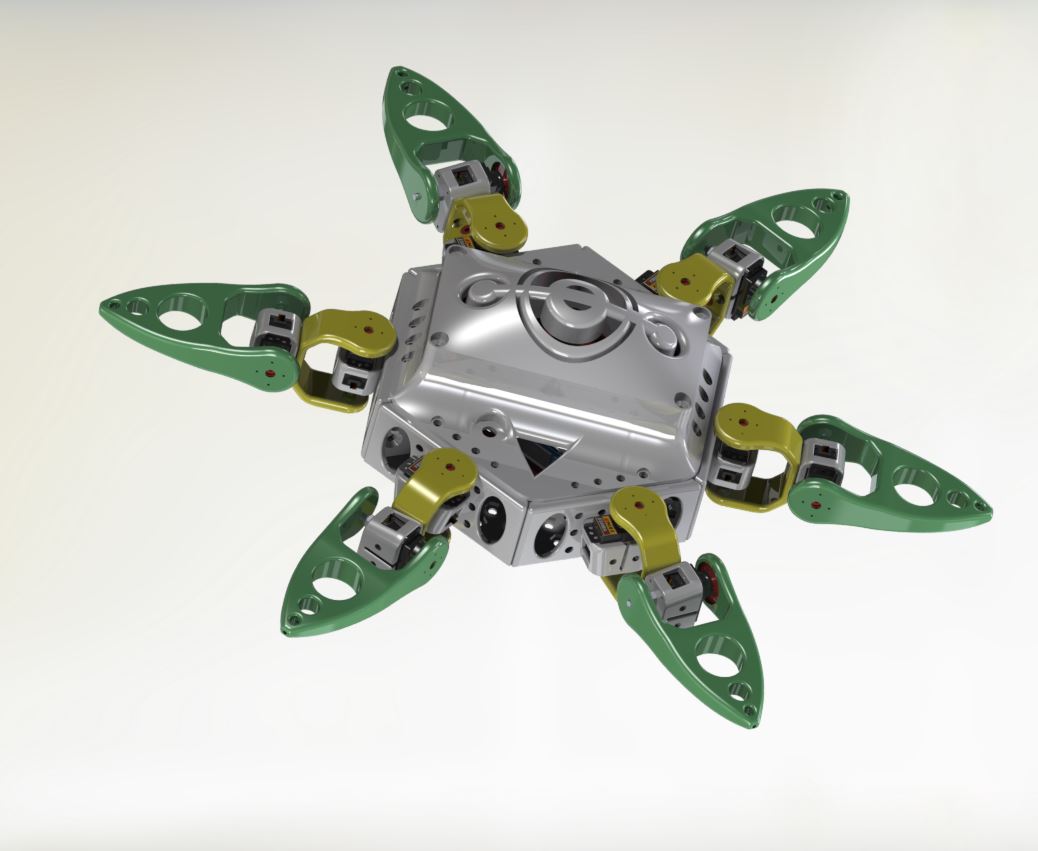
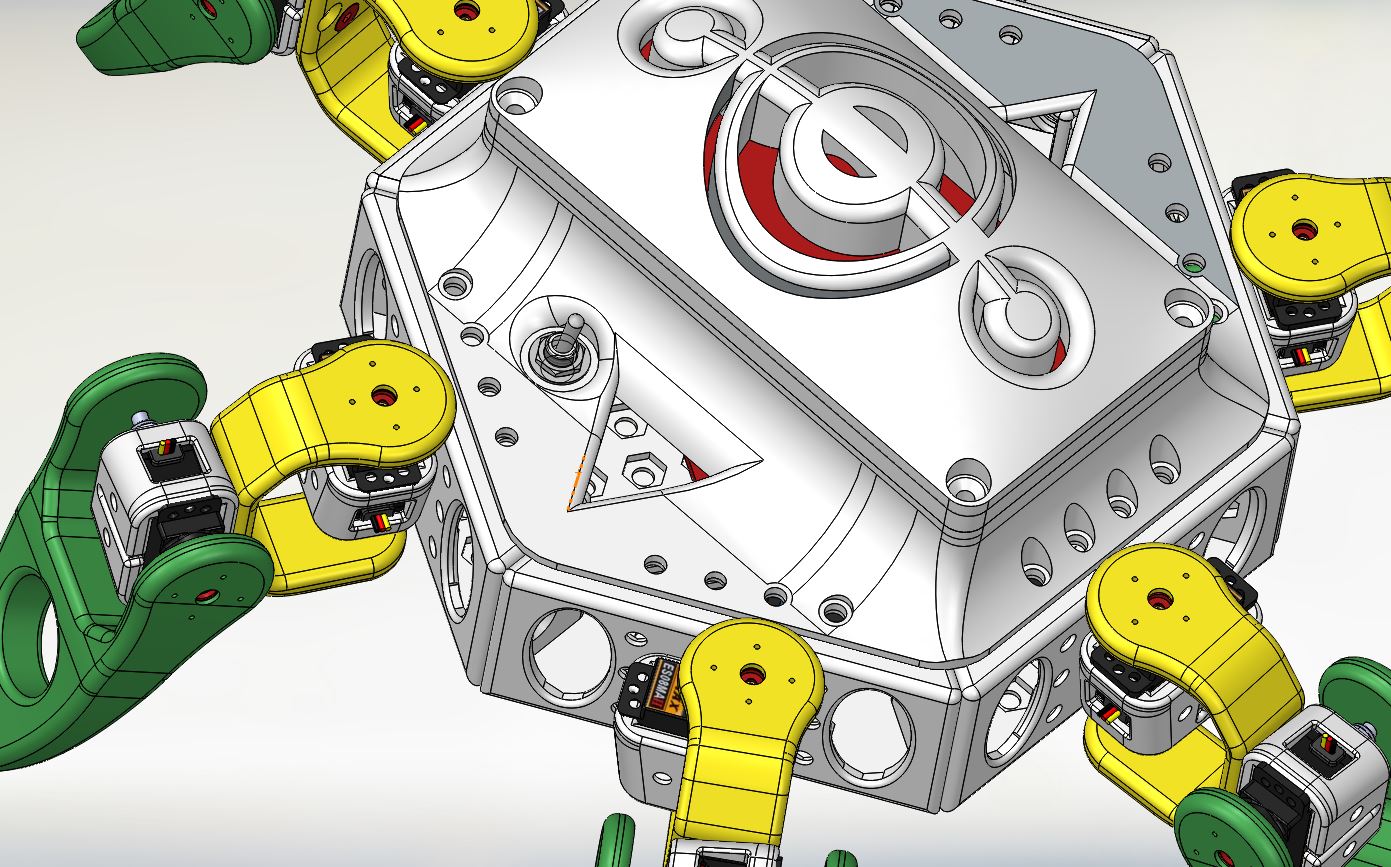
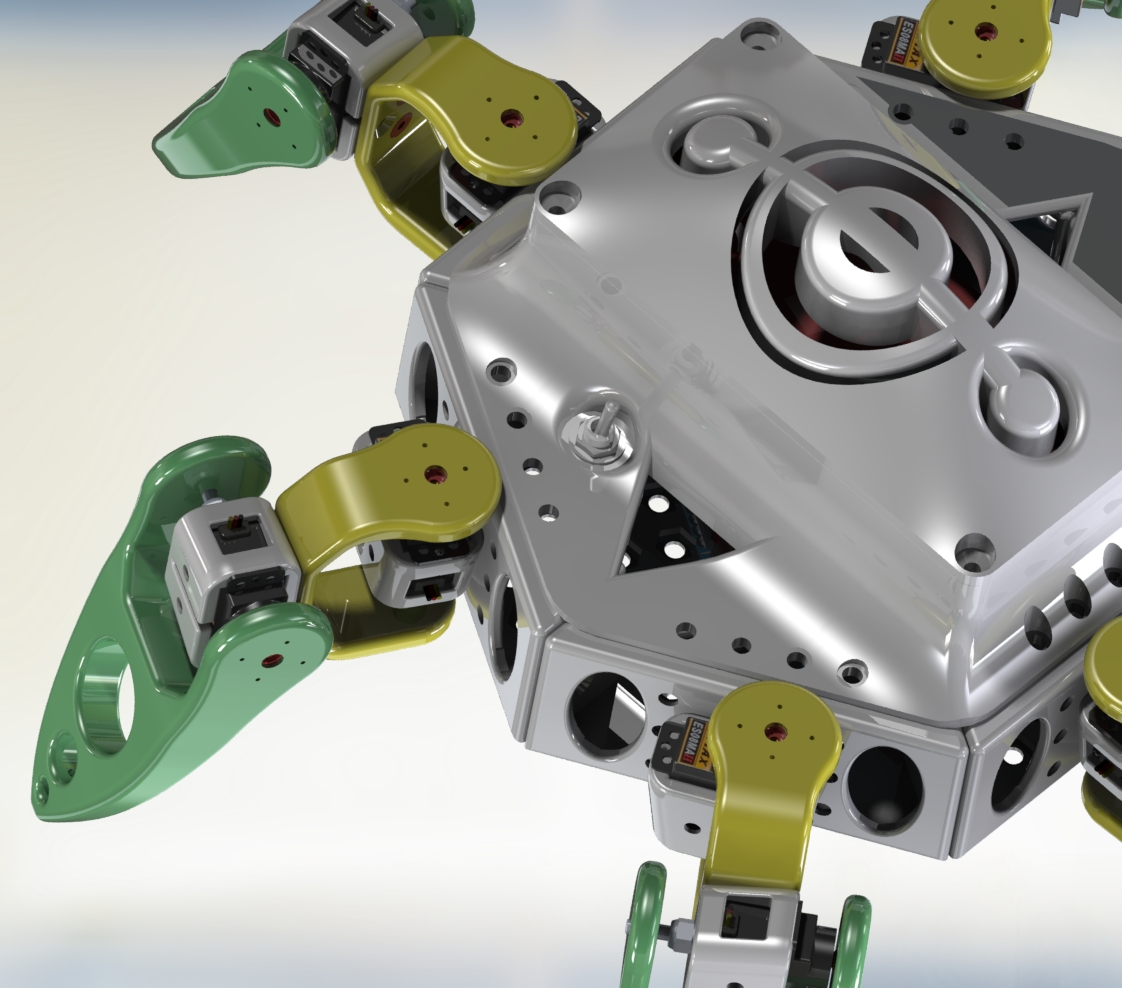
Vue éclatée de mini Spider S12-PC pour le choix des pièce et l’ensemble des fichiers à télécharger Version 09-02-2017 |
Spider version 09-02-2017 RedOhm – 001
Spider version 09-02-2017 RedOhm – 002
Spider version 09-02-2017 RedOhm – 003
–
Ensemble des fichiers à télécharger pour imprimer Spider Version 2.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
.
![]()
Porte batterie et capot |
.


.
Ensemble des fichiers à télécharger pour imprimer le capot et le porte batterie
–
Retour au sommaireRepérage des numéros des servomoteurs
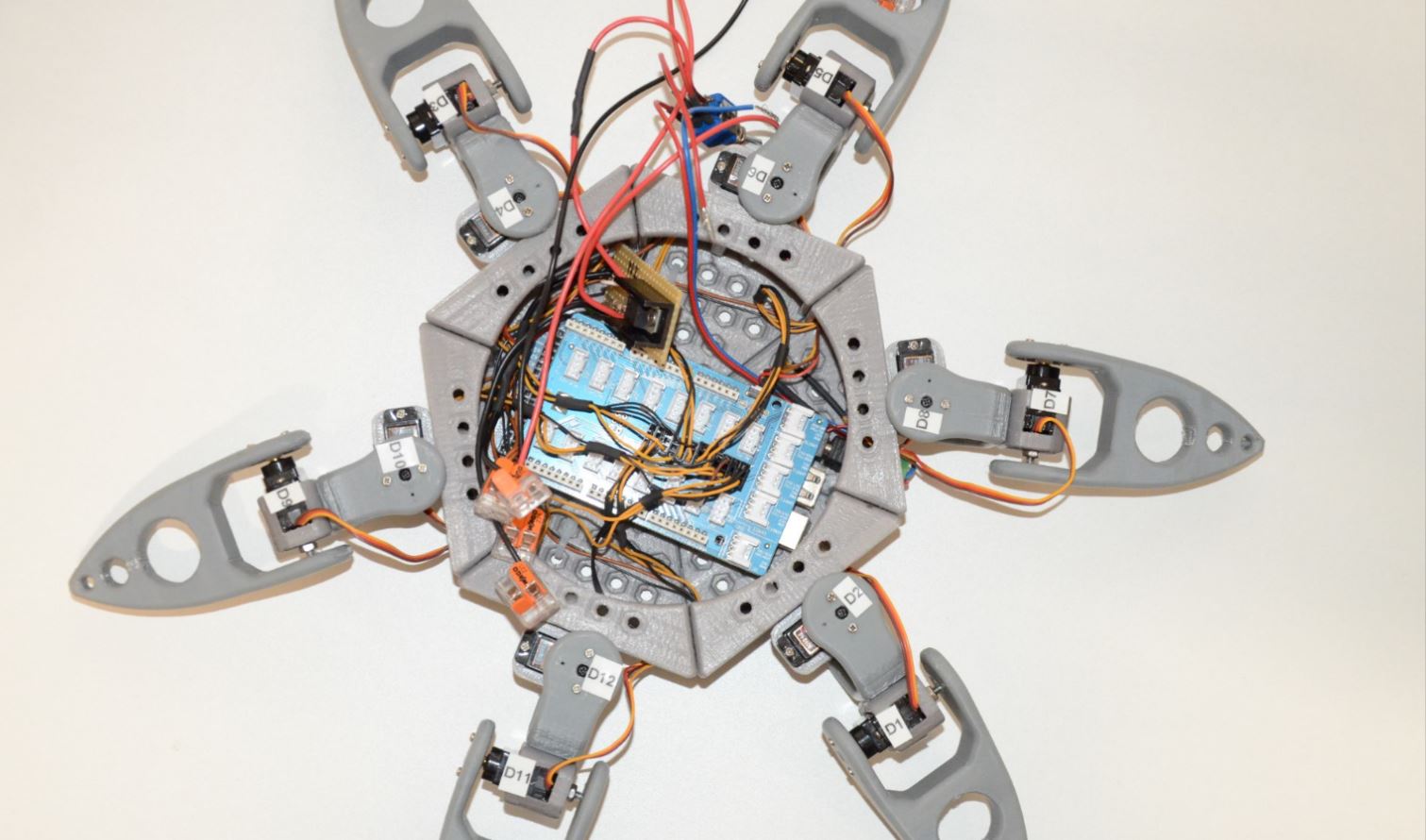
Robot Spider repérage RedOhm
–
Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur )
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
–
Retour au sommaire![]()
Programme d’initialisation de mini-spider et un petit bonjour
.
![]()
Programme enchaînement de divers sous programme 002
- Initialisation spider
- Petit bonjour
- Position d’attaque de Spider
- Rotation de Spider
–
![]()
Présentation de Mr le régulateur 7806 en boitier TO220
La série de régulateurs à trois broches LM78XX est disponible dans de nombreuses valeurs de tensions de sortie fixes et est très utile dans nombre d’applications. Bien que conçus pour fournir des tensions de sortie fixes, ces circuits peuvent également délivrer des tensions et courants réglables à l’aide de quelques composants extérieurs
La série LM78XX est disponible en boîtier aluminium TO-220 et peut délivrer jusqu’à 1 A si on utilise un refroidisseur approprié. Ce boîtier possède une limitation en courant interne pour ne pas dépasser les limites de sécurité en courant de pointe. Une plage de sécurité est prévue pour le transistor de sortie permettant de limiter la puissance interne dissipée. Si celle-ci devient trop importante pour le refroidisseur utilisé, le circuit de disjonction thermique est activé pour éviter une surchauffe du circuit intégré.