
Mise à jour le 11/11/2021 : Dans cet article vous trouverez les caractéristiques principales du module AI HuskyLens Gravity SEN0305 avec utilisation de la reconnaissance faciale .
Sommaire :
- Présentation du module AI HuskyLens Gravity SEN0305
- Tuto sur la reconnaissance facial
- Schéma de principe pour le cablage entre la carte Arduino Uno et la carte SEN0305
- Programme de reconnaissance faciale, de suivis de visage et du mode patrouille
- Retour au menu de la caméra.
.
![]()
Présentation du module AI HuskyLens Gravity SEN0305 |
.
Le HuskyLens Gravity est un capteur visuel intelligent, économique, simple d’utilisation basé sur une caméra OV2640 associée à un afficheur 2″ IPS et à un processeur Kendryte K210.
Grâce au port UART / I2C, HuskyLens peut se connecter à Arduino et micro:bit pour vous aider à réaliser des projets très créatifs sans jouer avec des algorithmes complexes.
Spécification :
- Processeur : Kendryte K210
- Capteur d’images : Objectif Husky SEN0305 : OV2640 (appareil photo 2,0 mégapixels).
- Tension d’alimentation : 3,3 ~ 5,0 V
- Consommation : 320 mA à 3,3 V , 230 mA à 5,0 V (mode de reconnaissance faciale ; luminosité du rétroéclairage à 80 % ; lumière d’ appoint éteinte).
- Port de communication : UART ; I2C
- Affichage : écran IPS de 2,0 pouces avec une résolution de 320*240
- Algorithmes intégrés : reconnaissance faciale, suivi d’objets, reconnaissance d’objets, suivi de lignes, reconnaissance de couleurs, reconnaissance de balises, classification d’objets
- Dimensions : 52 mm x 44,5 mm (2,05 * 1,75 pouces)
Retour au sommaire
![]()
Tuto sur la reconnaissance facial |
.
.
Retour au sommaire![]()
Schéma de principe pour le cablage entre la carte Arduino Uno et la carte SEN0305 |
.
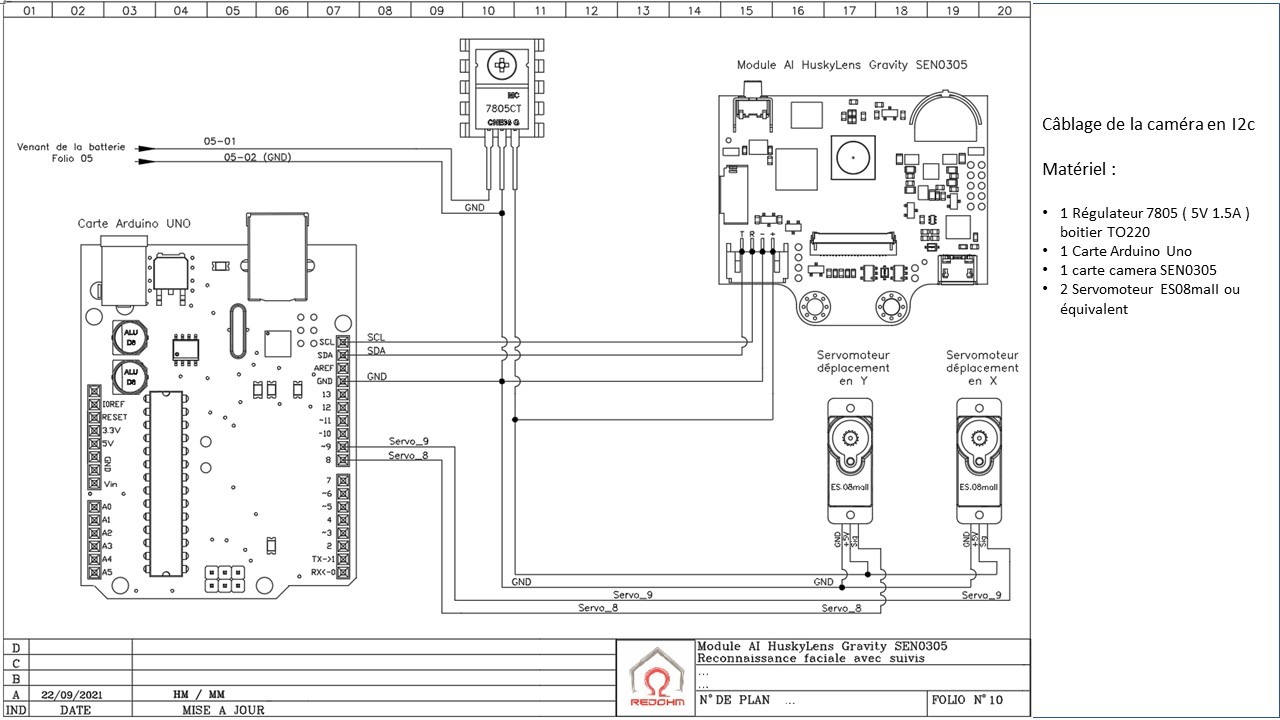
.
Matériel :
- Régulateur 7805 en boitier TO2020
- https://www.gotronic.fr/art-l7805cv-1578.htm
- Module AI HuskyLens Gravity SEN0305
- https://www.gotronic.fr/art-module-ai-huskylens-gravity-sen0305-31965.htm
- https://fr.rs-online.com/
- code article : 204-9898
- Arduino UNO
- https://www.gotronic.fr/
- code article : 25950
- https://www.gotronic.fr/
![]()
Programme de reconnaissance faciale, de suivis de visage et du mode patrouille |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 |
// // // ********************************************* // // reconnaissance faciale // suivis de visage reconnu // mode patrouille // // Arduino avec la Camera Sen0305 // // // Code Modifié : Mazelin H // RedOhm // Le 01/09/2021 // ********************************************* // À utiliser pour déterminer s'il s'agit d'une flèche ou d'un bloc // -> COMMAND_RETURN_BLOCK : C'est un bloc // -> COMMAND_RETURN_ARROW : C'est une flèche // // Pour un bloc : // xCenter : X Centre du bloc // yCenter : Centre Y du bloc // width : Largeur du bloc // height : Hauteur du bloc #include <Servo.h> #include "HUSKYLENS.h" HUSKYLENS huskylens; void printResult(HUSKYLENSResult result); // Variable de passage int passage_setup = 0 ; // Crée un objet de type "Servo_X", nommé -> Servo_X Servo servo_x; Servo servo_y; int position_x = 90 ; int position_y = 90 ; // variable pour le calcul de l'erreur de positionnement en x int erreur_x; // Variable pour La grandeur réglante en x. La valeur réglante est la grandeur de // commande qui a été choisie pour contrôler la grandeur réglée int valeur_reglante_x; // variable pour le calcul de l'erreur de positionnement en y int erreur_y; // Variable pour La grandeur réglante en y. La valeur réglante est la grandeur de // commande qui a été choisie pour contrôler la grandeur réglée int valeur_reglante_y; // position du mode patrouille int pos ; // ********************************************************************** // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécutée une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties // ********************************************************************** void setup() { // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. Serial.begin(115200); // on attent que le port de communication soit pret while (!Serial) { ; } // communication i2c Wire.begin(); while (!huskylens.begin(Wire)) { Serial.println(F("Échec du démarrage!")); Serial.println(F("1.Veuillez revérifier le \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>I2C)")); Serial.println(F("2.Veuillez revérifier la connexion.")); delay(100); } // associe le servomoteur x à la broche 9 servo_x.attach(9); // associe le servomoteur y à la broche 9 servo_y.attach(8); delay(15); // Positionne mes servomteurs à 90 (phase d'initialisation) servo_x.write(position_x); servo_y.write(position_y); // Réalise une pause dans l'exécution du programme pour une durée // de 50 millisecondes // permettant au servomoteur d'atteindre sa position delay(50); } // ********************************************************************** // Le programme principal s’exécute par une boucle infinie appelée Loop () // ********************************************************************** void loop() { // verifie la connexion if (!huskylens.request()) { Serial.println(F("Échec de la demande de données à HUSKYLENS, revérifiez la connexion!")); } // controle si le module possède des enregistrements else if(!huskylens.isLearned()) { Serial.println(F("Je suis desolé il faut appuyer sur le bouton d'apprentissage ")); } // on verifie si le systeme ne detecte rien dans son champs de vision else if(!huskylens.available()) { Serial.println(F("Aucun bloc ou flèche n'apparaît à l'écran! Oryon ne detecte rien ")); // mise en service du mode patrouille // pour la recherche d'un visage // x < y (position_x est inferieur à y) if (( position_x < 170)&&( pos == 0)) { position_x = position_x +1; servo_x.write(position_x); } else if (( position_x < 171)&&(position_x > 10)) { pos = 1 ; position_x = position_x -1; servo_x.write(position_x); } else if (position_x <= 10) { pos=0; } delay(20); Serial.println (position_x); } else { Serial.println(F("###########")); while (huskylens.available()) { HUSKYLENSResult result = huskylens.read(); printResult(result); } } } // void printResult(HUSKYLENSResult result){ if (result.command == COMMAND_RETURN_BLOCK){ Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID); // Deplacement de la camera sur horizontal cote droit // // x > y (result.xCenter est supérieur à y) if (result.xCenter > 165) { // calcul de l'erreur de positionnement erreur_x = result.xCenter - 165 ; // valeur_reglante valeur_reglante_x= map(erreur_x,1,50,1,5); position_x =position_x+valeur_reglante_x ; servo_x.write(position_x); } // Deplacement de la camera sur horizontal cote gauche // else if ( result.xCenter < 155) { // calcul de l'erreur de positionnement erreur_x = 155 - result.xCenter ; // valeur_reglante // map -> Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette // map (valeur, limite_basse_source, limite_haute_source, limite_basse_destination, limite_haute_destination) valeur_reglante_x= map(erreur_x,1,50,1,5); position_x = position_x - valeur_reglante_x ; servo_x.write(position_x); } else if ((result.xCenter > 165)&&( result.xCenter < 155)) { servo_x.write(position_x); } // si la camera est trop haut if (result.yCenter < 115) { // calcul de l'erreur de positionnement erreur_y = 115-result.yCenter ; // valeur_reglante valeur_reglante_y= map(erreur_y,1,50,1,5); position_y = position_y + valeur_reglante_y ; servo_y.write(position_y); } // si la camera est trop basse else if ( result.yCenter > 125) { // calcul de l'erreur de positionnement pour la camera trop basse erreur_y = result.yCenter -125 ; // valeur_reglante valeur_reglante_y= map(erreur_y,1,50,1,5); position_y = position_y -valeur_reglante_y ; servo_y.write(position_y); } // Temporisation de stabilité delay (100); // affectation du resultat a un prenom ( a une personne ) if (result.ID == 1 ) { Serial.println ("Bonjour Louis"); } else if (result.ID == 2 ) { Serial.println ("Bonjour Timeo"); } else if (result.ID == 3 ) { Serial.println ("Bonjour au grand maitre "); } else if (result.ID == 4 ) { Serial.println ("Salut Johann "); } else if (result.ID == 5 ) { Serial.println ("Bonjour Marie"); } } else if (result.command == COMMAND_RETURN_ARROW){ Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID); } else{ Serial.println("Objet inconnu!"); } } |
.
Retour au sommaire