
Mise à jour le 18/11/2020 :
.
Sommaire :
- 001 – Présentation
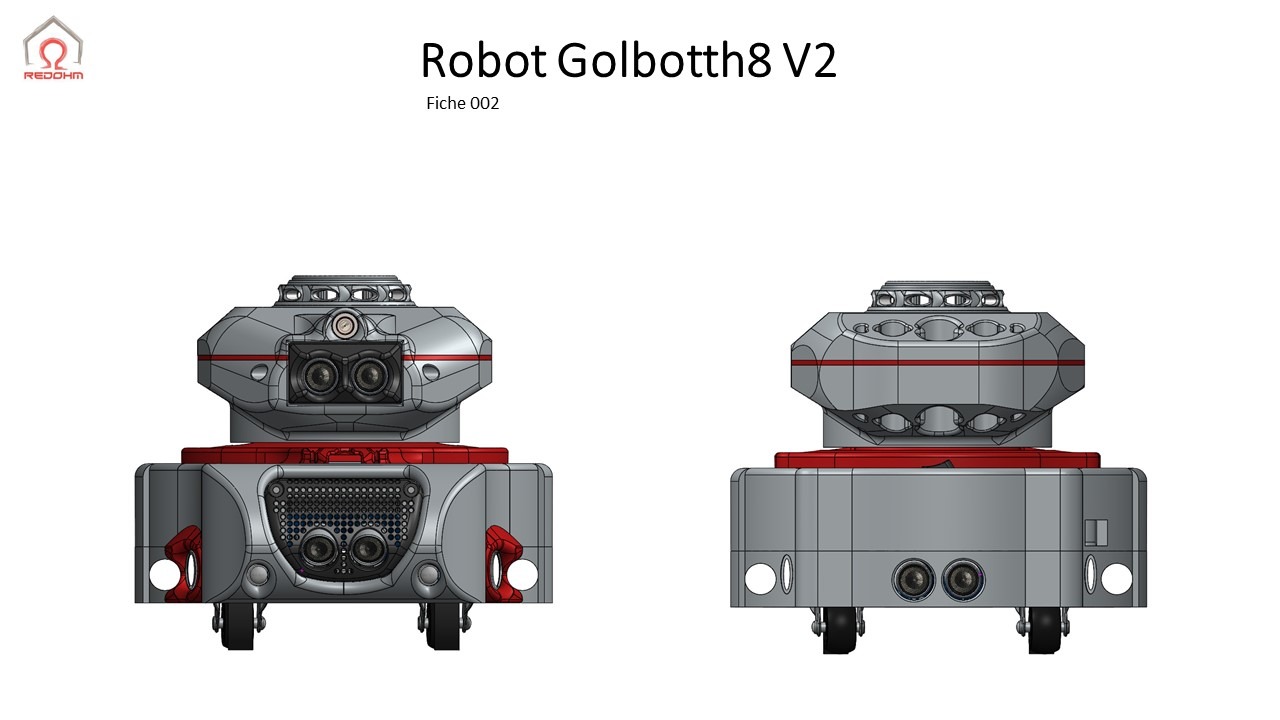
- 002 – Vue de face et arriere
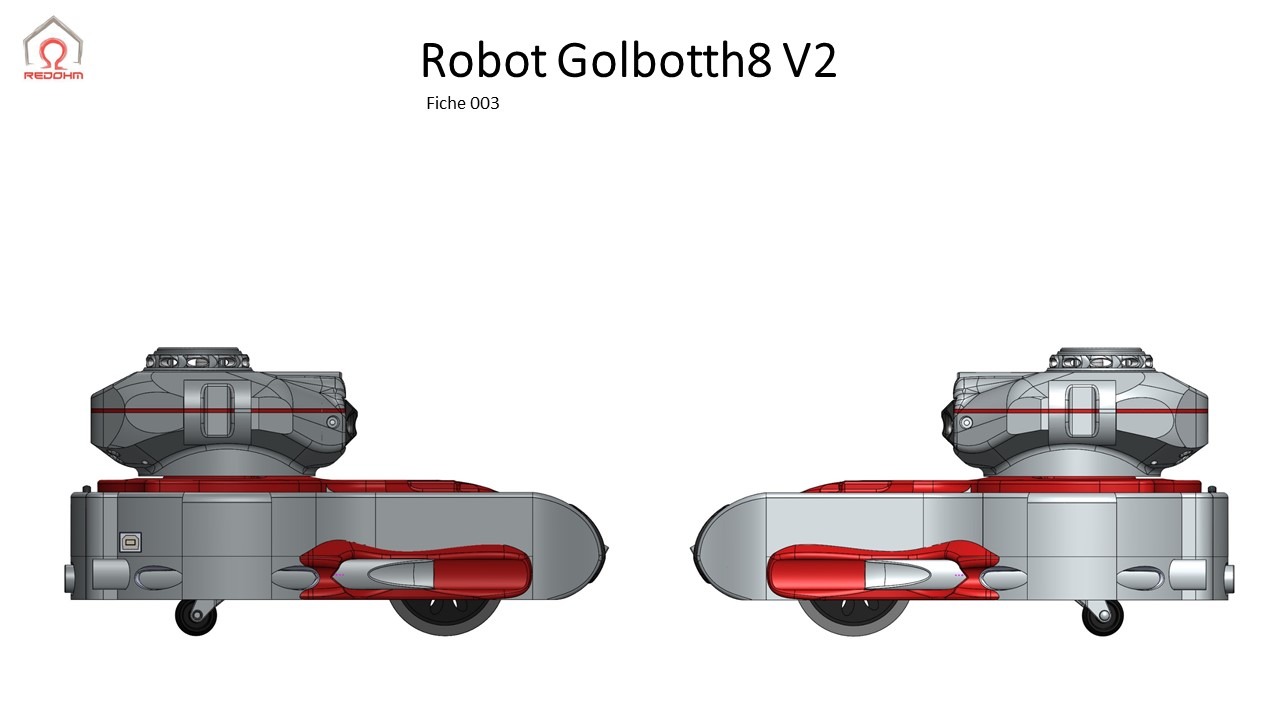
- 003 – Vue de coté
- 004 – Eclaté vue de dessus
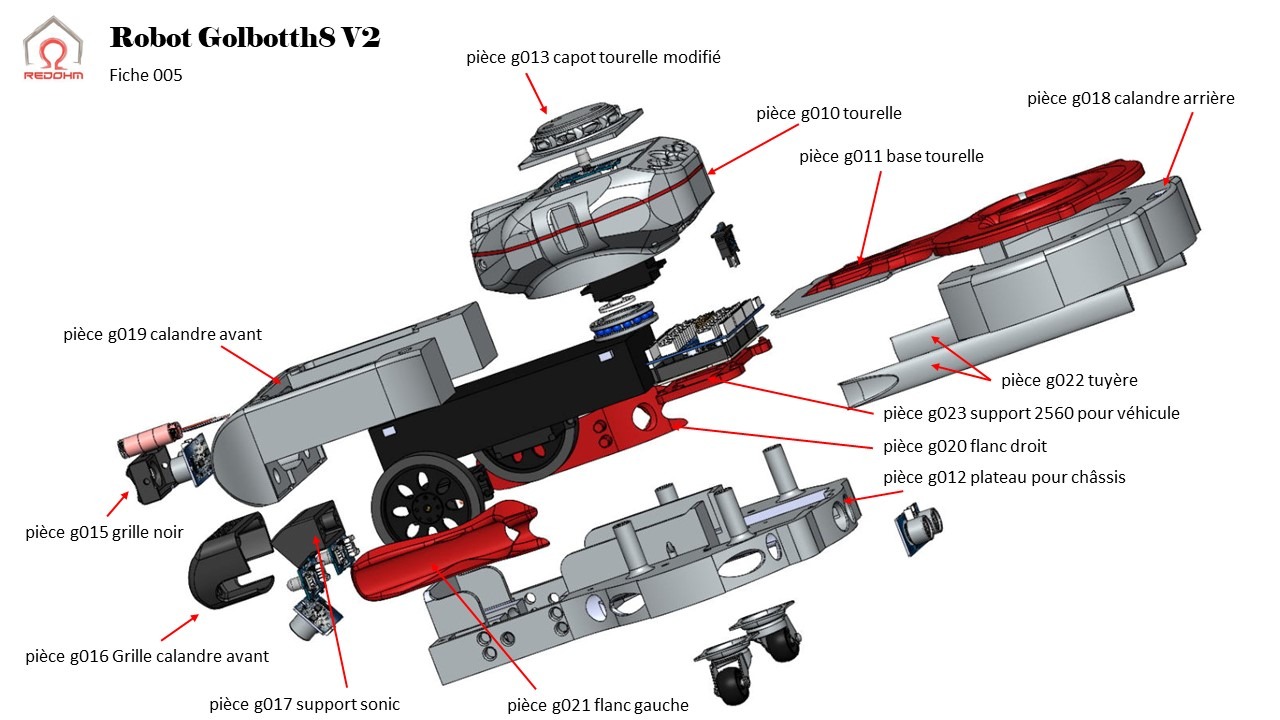
- 005 – Vue eclatée avec repérage des pieces
- 006 – Vue eclatée de coté avec repérage des pieces
- 007 – 008 – Tourelle
- 009 – 010 – Base tourelle
- 011 – 012 – Pièce g012 plateau pour châssis
- 013 – capot tourelle
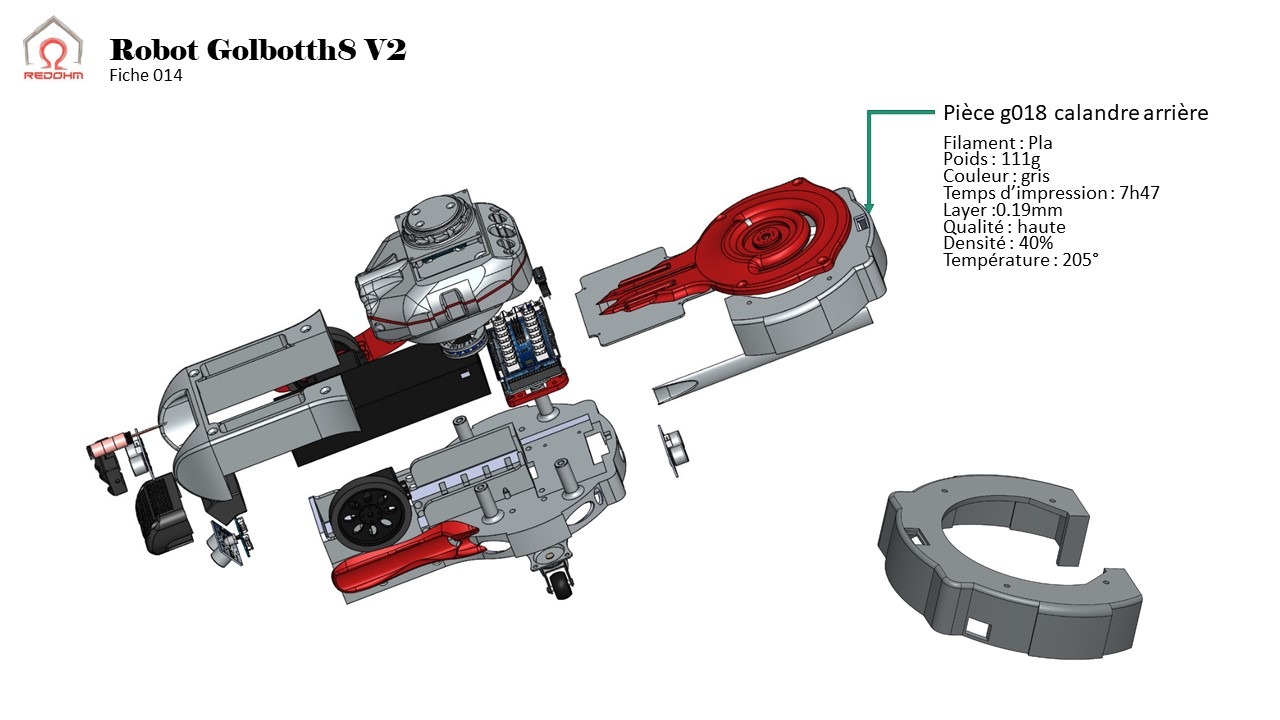
- 014 – Pièce g018 calandre arrière
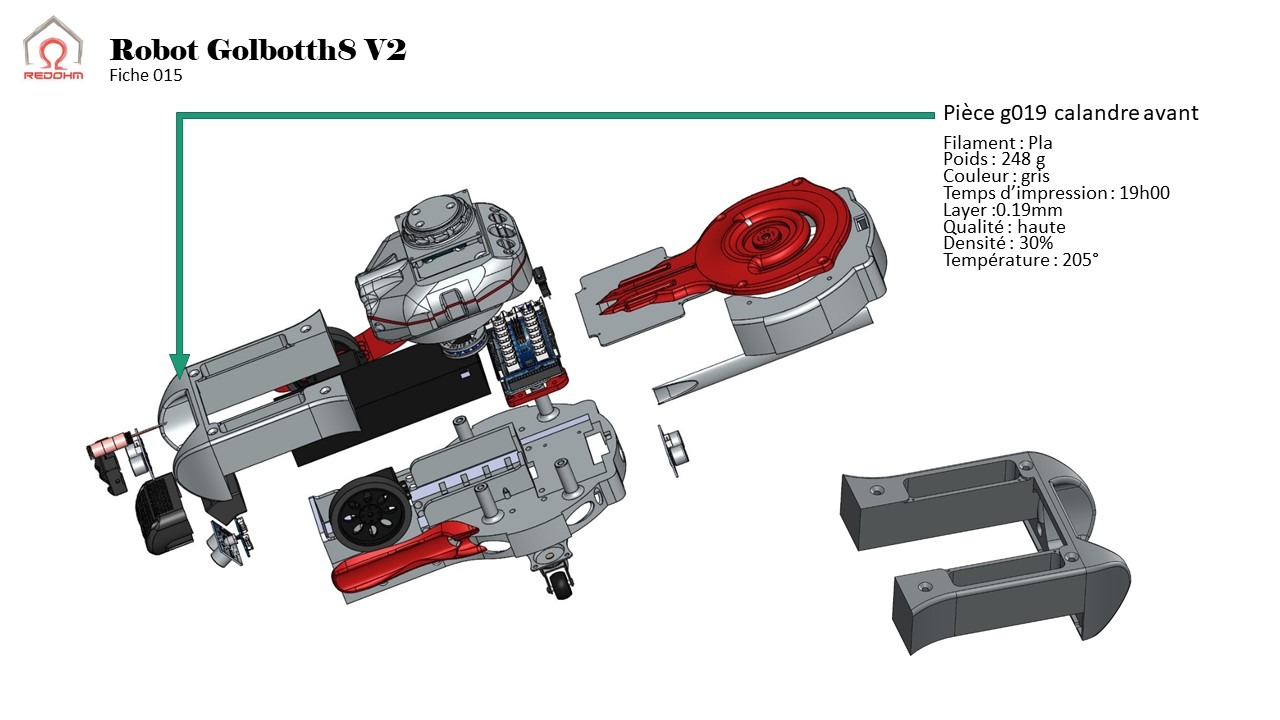
- 015 – Pièce g019 calandre avant
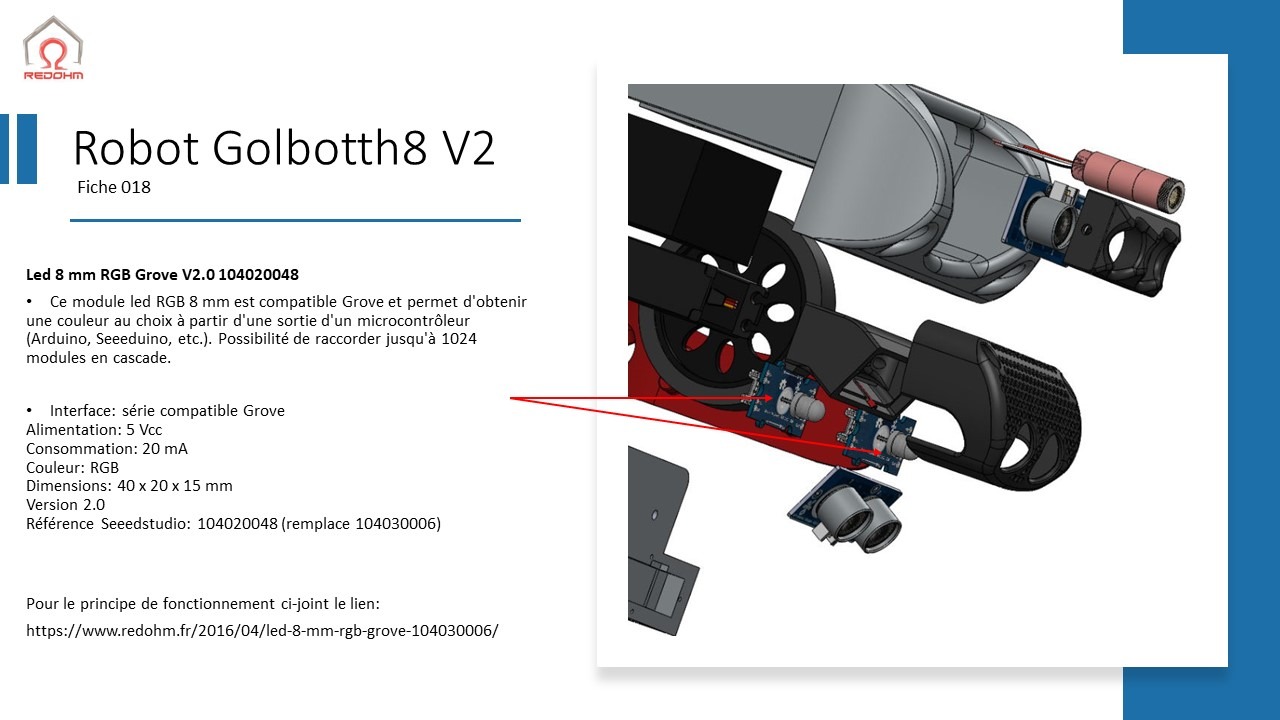
- 018 – Led 8 mm RGB Grove V2.0 104020048
- 019 – 19A – Télémètre à ultrasons Grove 101020010
- Retour a la page principale
.![]()
 .
.
Ce petit robot est destiné à vous initier à la programmation, nous l’appellerons Golbotth8. La construction de cet engin passe déjà par l’impression 3D, vous trouverez l’ensemble des fichiers STL sur notre site ainsi que la matière que nous avons utilisée et les différents conseils techniques. Vous aurez la possibilité de suivre des tutoriels sur Arduino avec ce module. Nous avons surtout essayé de minimiser le coût de l’ensemble.
.
Retour au sommaire
|
.
.
Retour au sommaire.![]() .
.
.
.![]() .
.

.
Retour au sommaire.![]() .
.
.
Retour au sommaire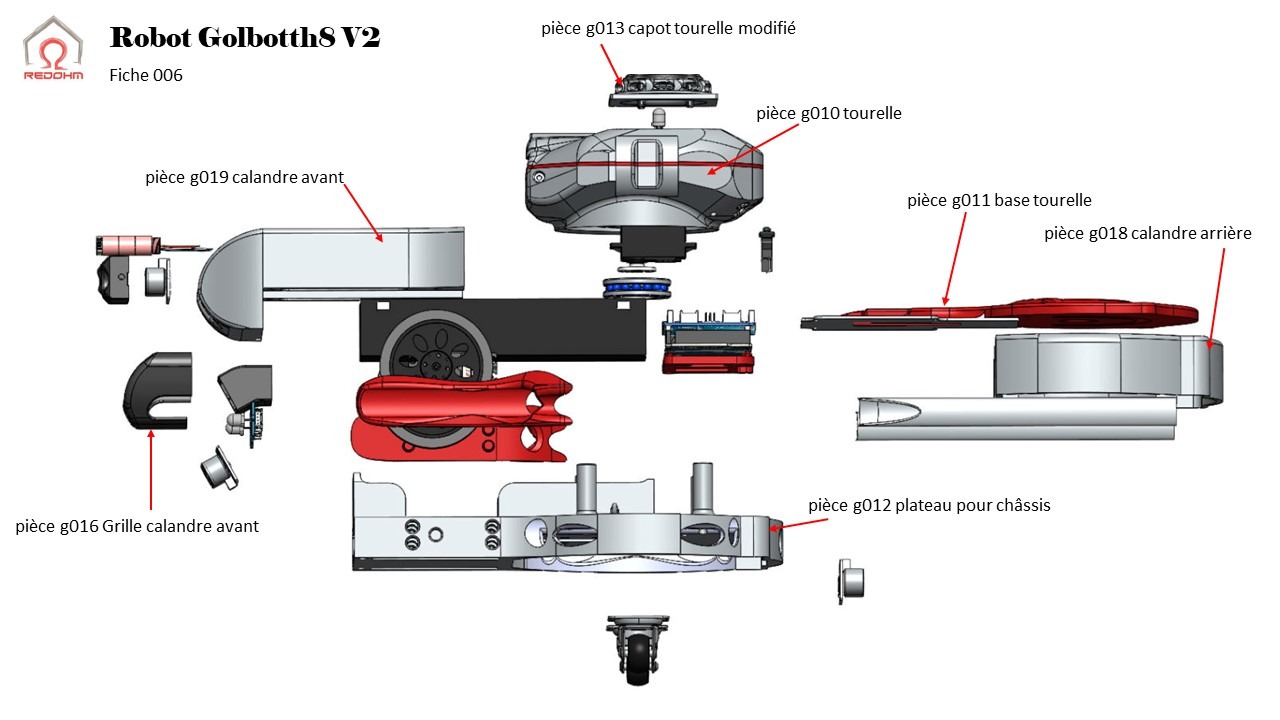
.
Retour au sommaire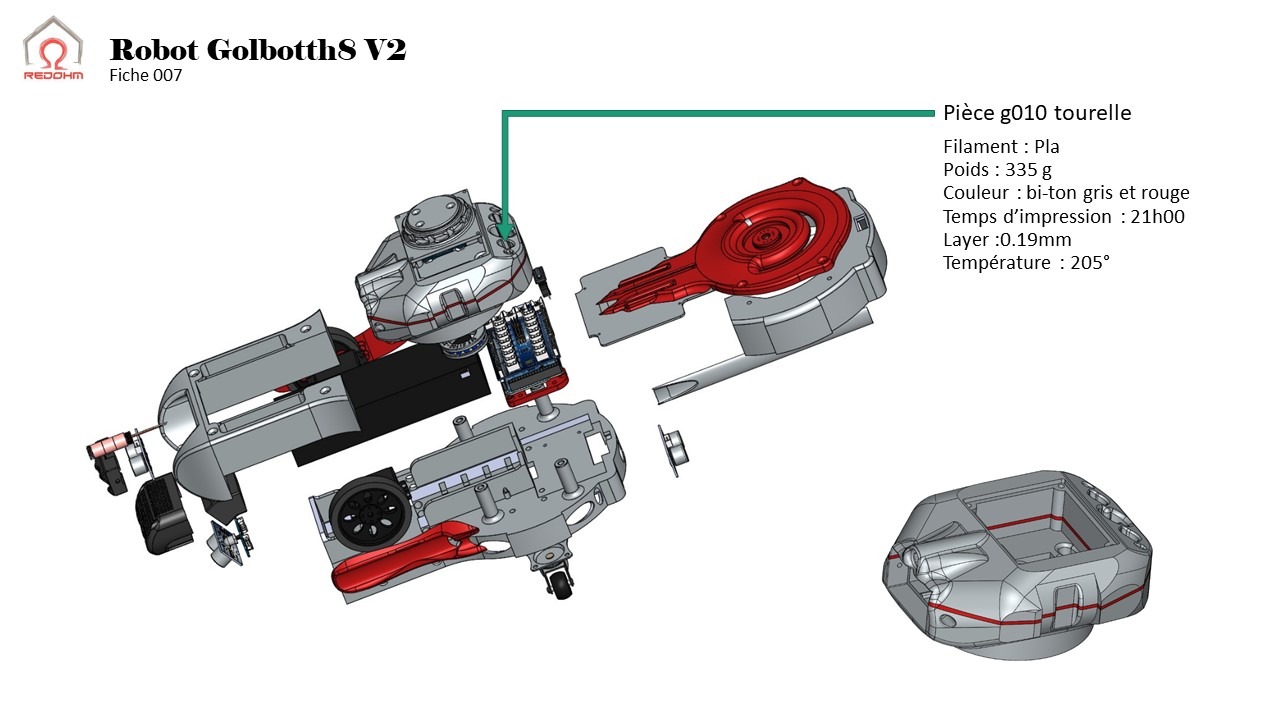
.
Pièce g010 tourelle – RedOhm
.
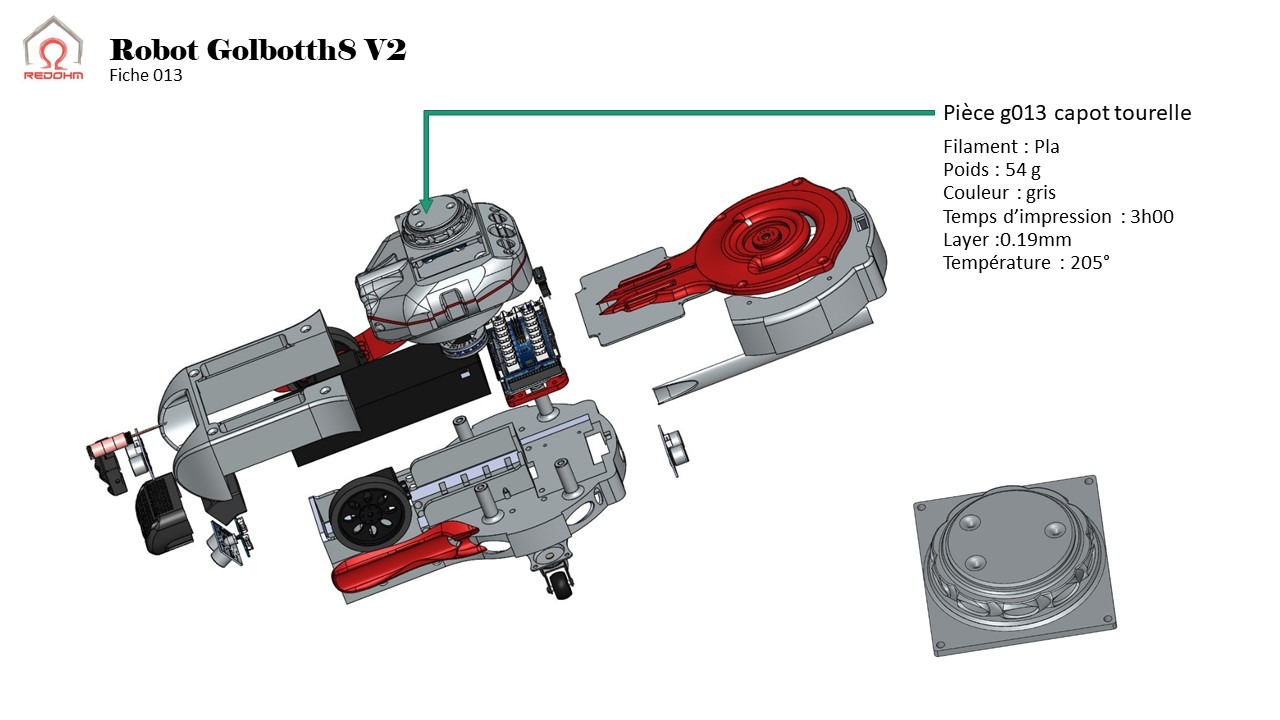
- Filament : Pla
- Constructeur du filament : https://www.arianeplast.com/
- Poids : 335 g
- Couleur : bi-ton gris et rouge
- Temps d’impression : 21h00
- Layer :0.19mm
- Température : 205°
.
Retour au sommaire
|
.
.
.
Retour au sommaire
|
.
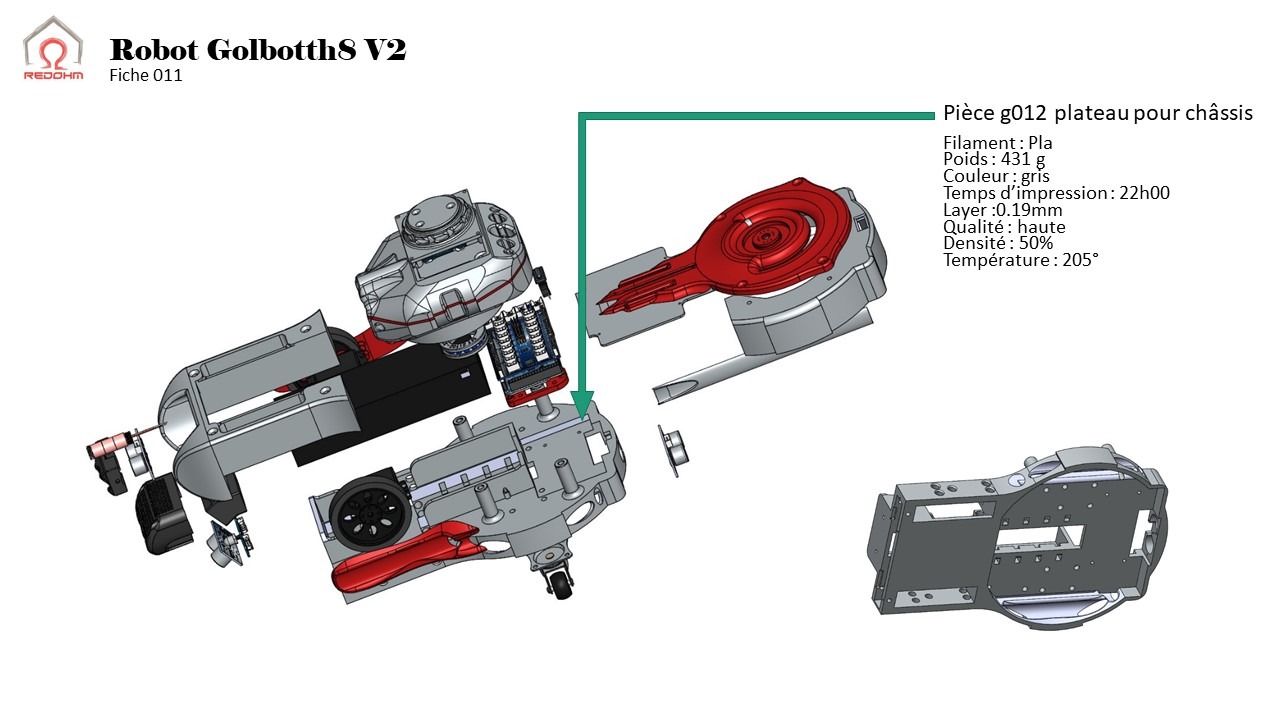
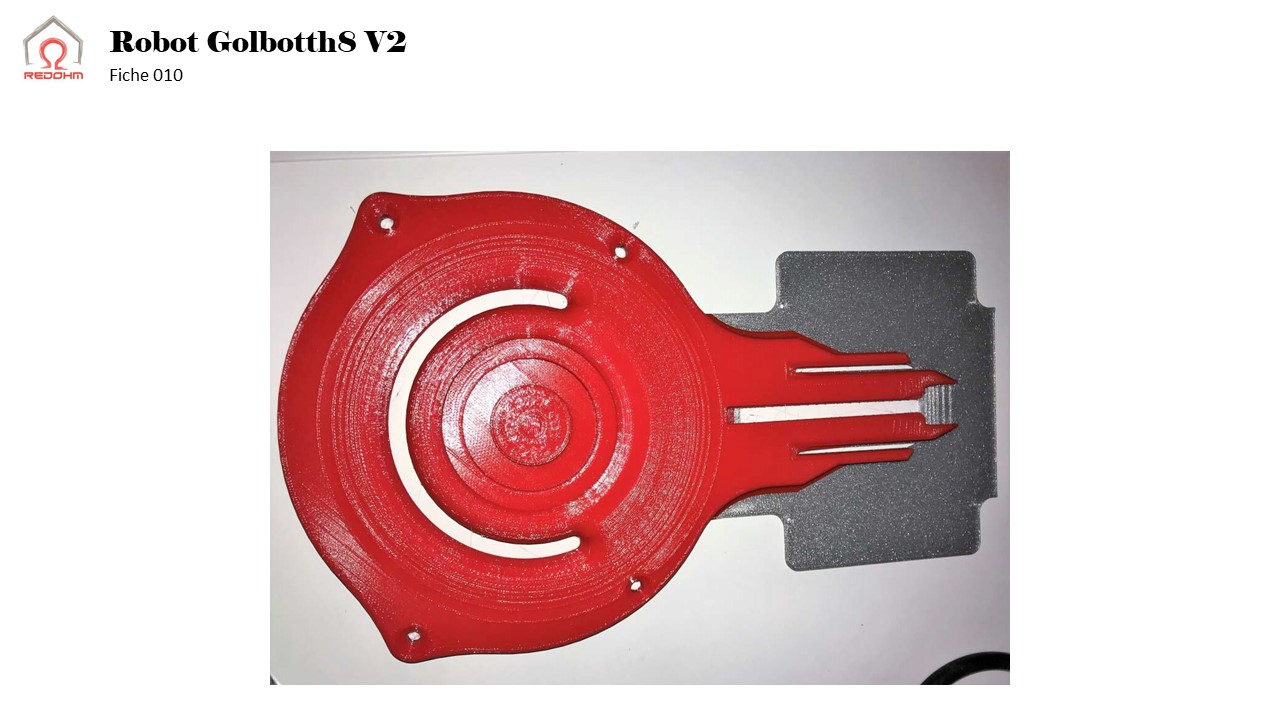
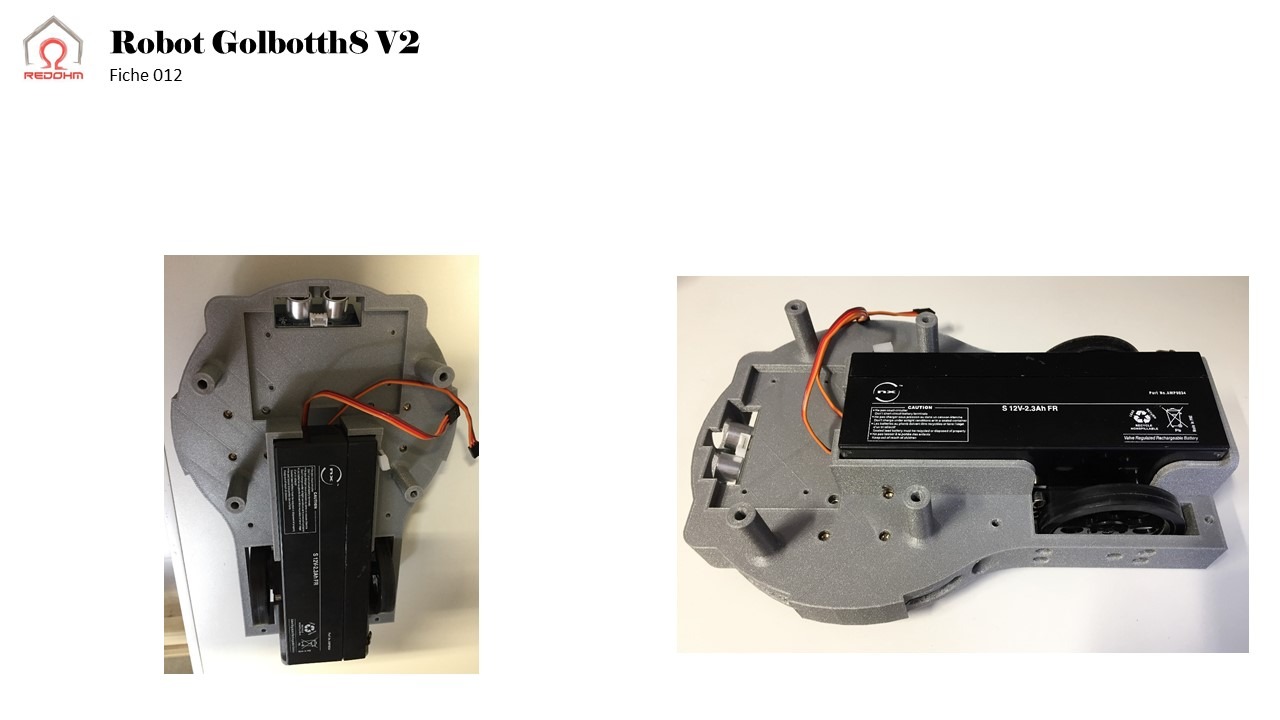
Pièce g012 plateau pour châssis – RedOhm
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
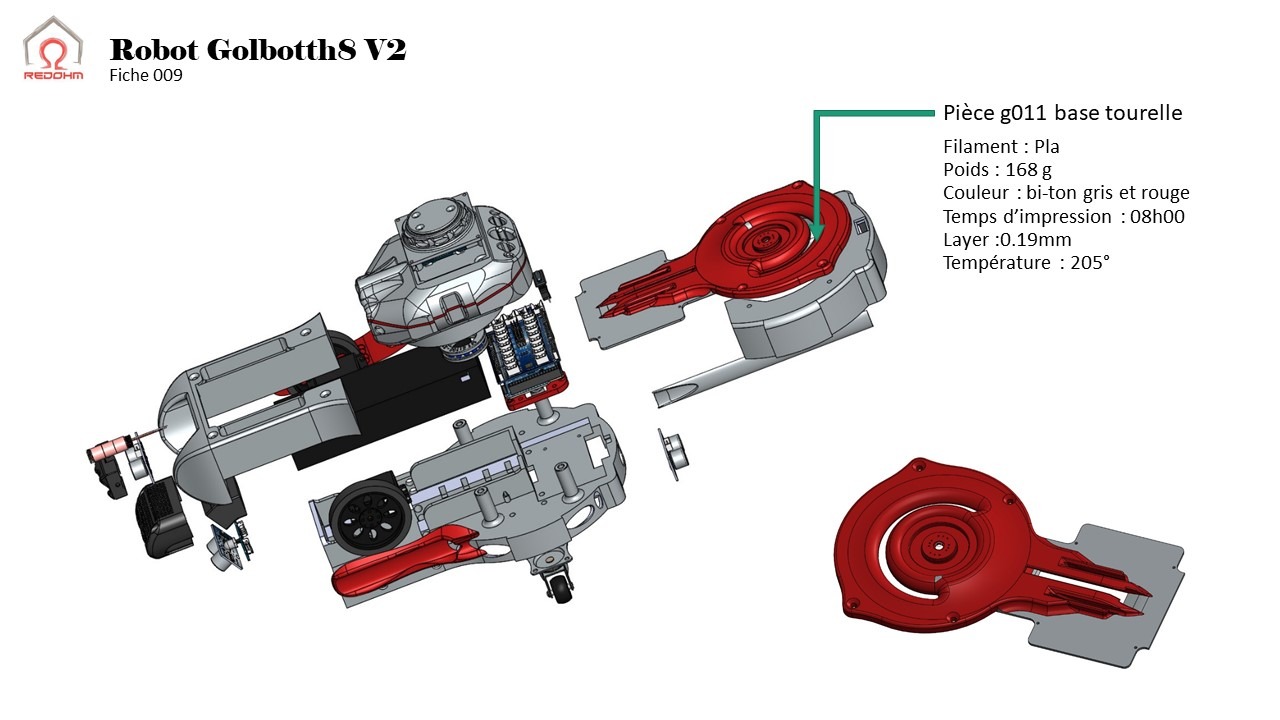
- Filament : Pla
- Poids : 111g
- Couleur : gris
- Temps d’impression : 7h47
- Layer : 0.19mm
- Qualité : haute
- Densité : 40%
- Température : 205°
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
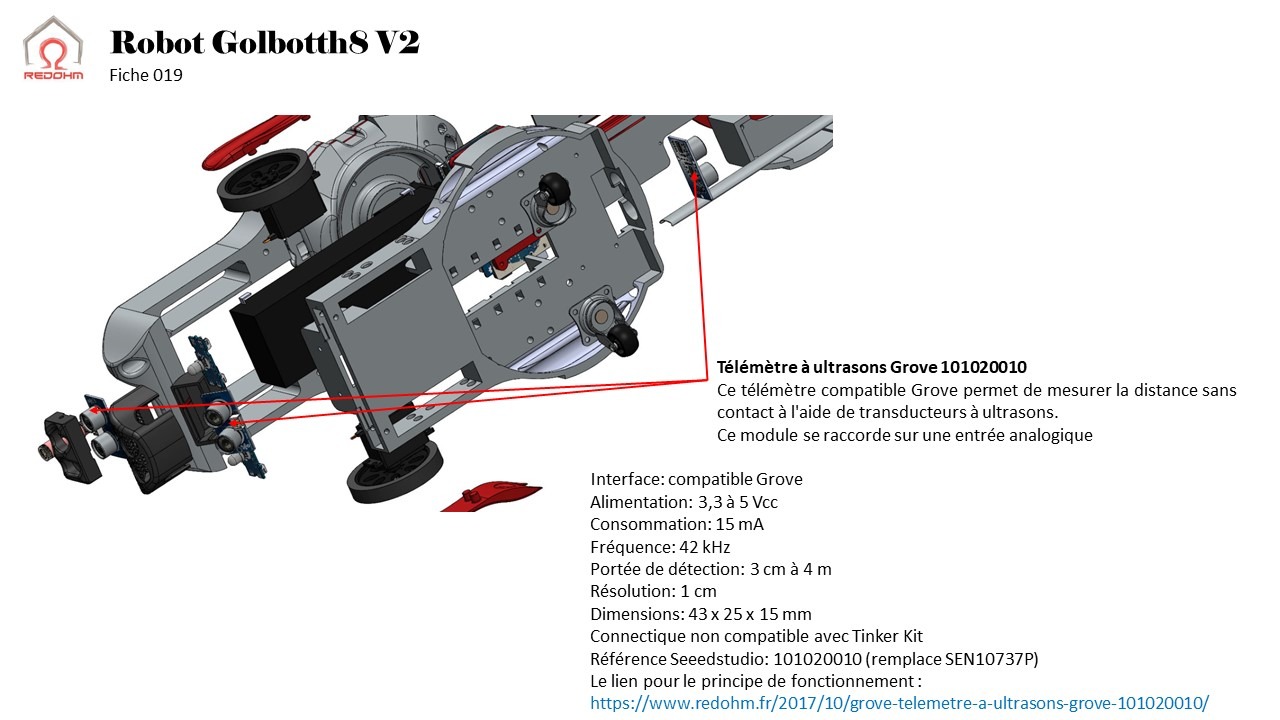
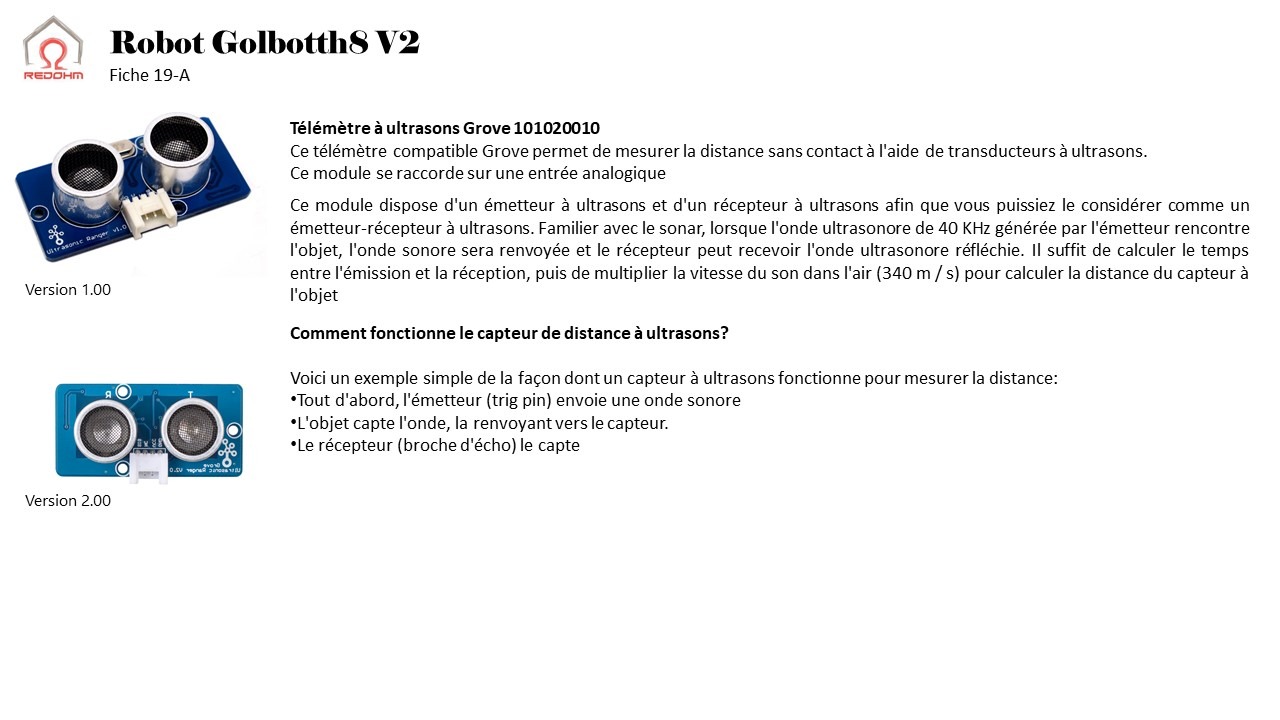
Télémètre à ultrasons Grove 101020010
Ce module dispose d’un émetteur à ultrasons et d’un récepteur à ultrasons afin que vous puissiez le considérer comme un émetteur-récepteur à ultrasons. Familier avec le sonar, lorsque l’onde ultrasonore de 40 KHz générée par l’émetteur rencontre l’objet, l’onde sonore sera renvoyée et le récepteur peut recevoir l’onde ultrasonore réfléchie. Il suffit de calculer le temps entre l’émission et la réception, puis de multiplier la vitesse du son dans l’air (340 m / s) pour calculer la distance du capteur à l’objet.
.
.
Comment fonctionne le capteur de distance à ultrasons?
Voici un exemple simple de la façon dont un capteur à ultrasons fonctionne pour mesurer la distance:
- Tout d’abord, l’émetteur (trig pin) envoie une onde sonore
- L’objet capte l’onde, la renvoyant vers le capteur.
- Le récepteur (broche d’écho) le capte
Le lien pour le principe de fonctionnement : https://www.redohm.fr/2017/10/grove-telemetre-a-ultrasons-grove-101020010/
Téléchargez la bibliothèque UltrasonicRanger depuis Github.
.
.
Retour au sommaire
|
.
.
Retour au sommaire