
Mise à jour le : 03/06/2021 :
Sommaire :
- Descriptif du capteur de distance Laser LIDAR-Lite 3
- Vidéo de présentation .
- Systéme de transmission de Rotation du LIDAR
- Montage de l’indexeur de la tête du laser Lidar – Fiche 100
- Connecteur rotatif 12 fils – Fiche 102
- Eclaté de la tête du laser lidar – Fiche 110
- Construction de la tourelle laser Lidar
- Etape 01 : Communication Pc vers Arduino lecture d’une variable 2
- Etape 02 : Conversion d’une chaîne de caractères ‘String’ en float coté Processing
- Etape 03 : Création d’un cercle point par point sur Processing pour simuler la rotation du laser lidar.
- Etape 08 : Utilisation de la carte DRI0023 .Shield moteur basé sur le driver A4988 permettant de contrôler 2 moteurs pas-à-pas à partir de 4 sorties digitales jusqu’à 2 A par phase. Idéale pour l’utilisation en rotation et élévation du laser .
- Etape 09 : Création d’un indexeur pour la plateforme lidar
- Téléchargement des fichiers Stl par Grabcad
- Pour tout probléme
- Retour au menu
.
![]()
Vidéo de présentation |
.
.
Retour au sommaire
![]()
Systeme de transmission de Rotation du LIDAR |
.
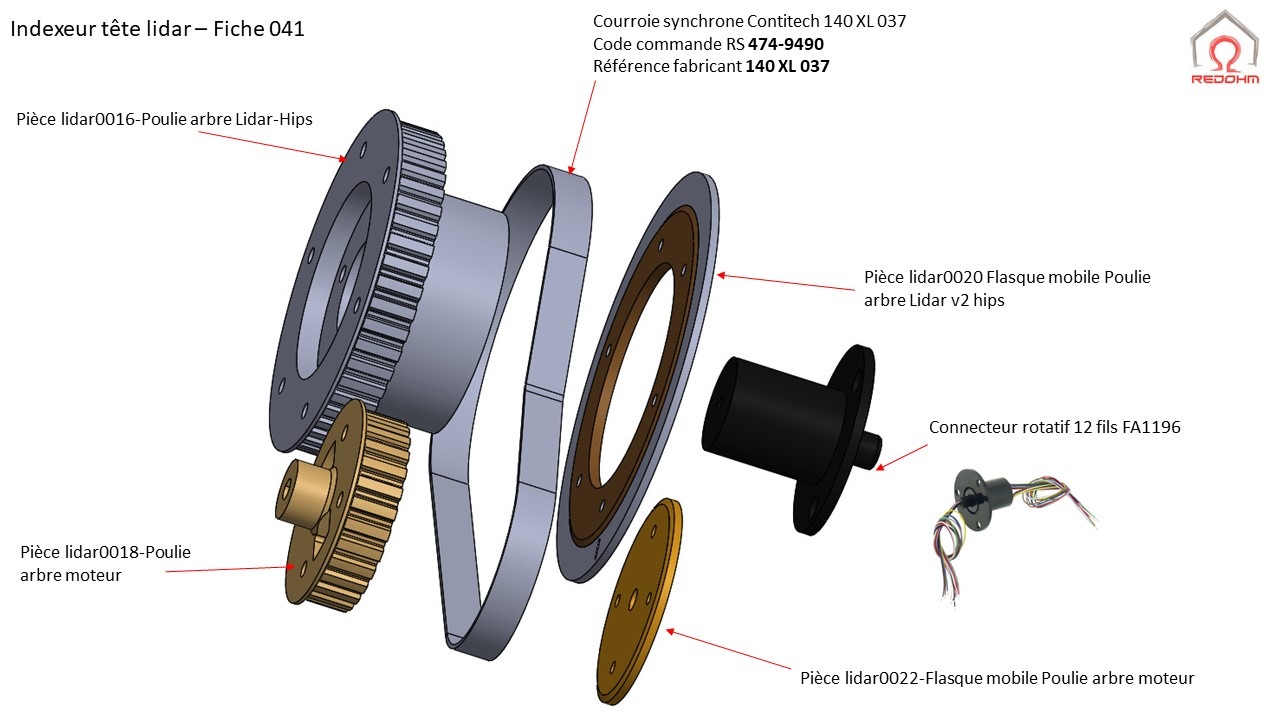
Laser lidar Fiche 041 – RedOhm
Retour au sommaire
![]()
Montage de l’indexeur de la tête du laser Lidar
|
.
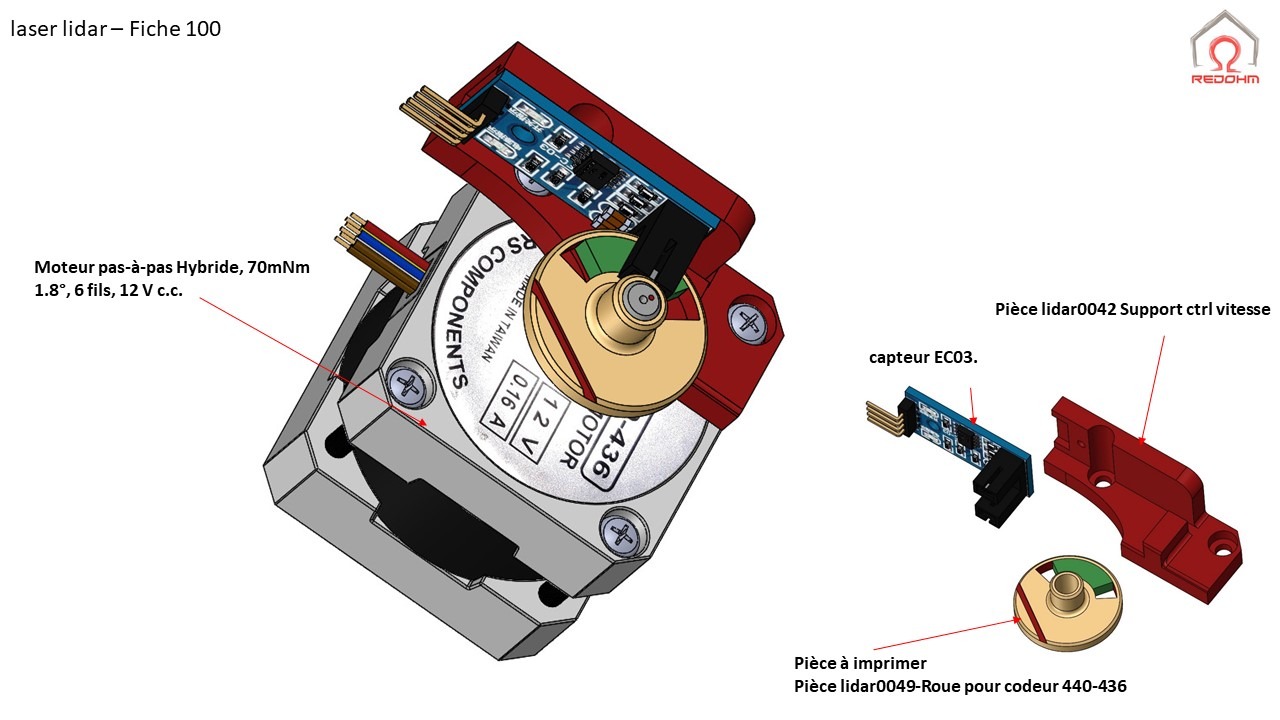
Laser lidar F100A – RedOhm
.
| Moteur pas à pas | |
|
Retour au sommaire
![]()
Connecteur rotatif 12 fils – Fiche 102 |
.
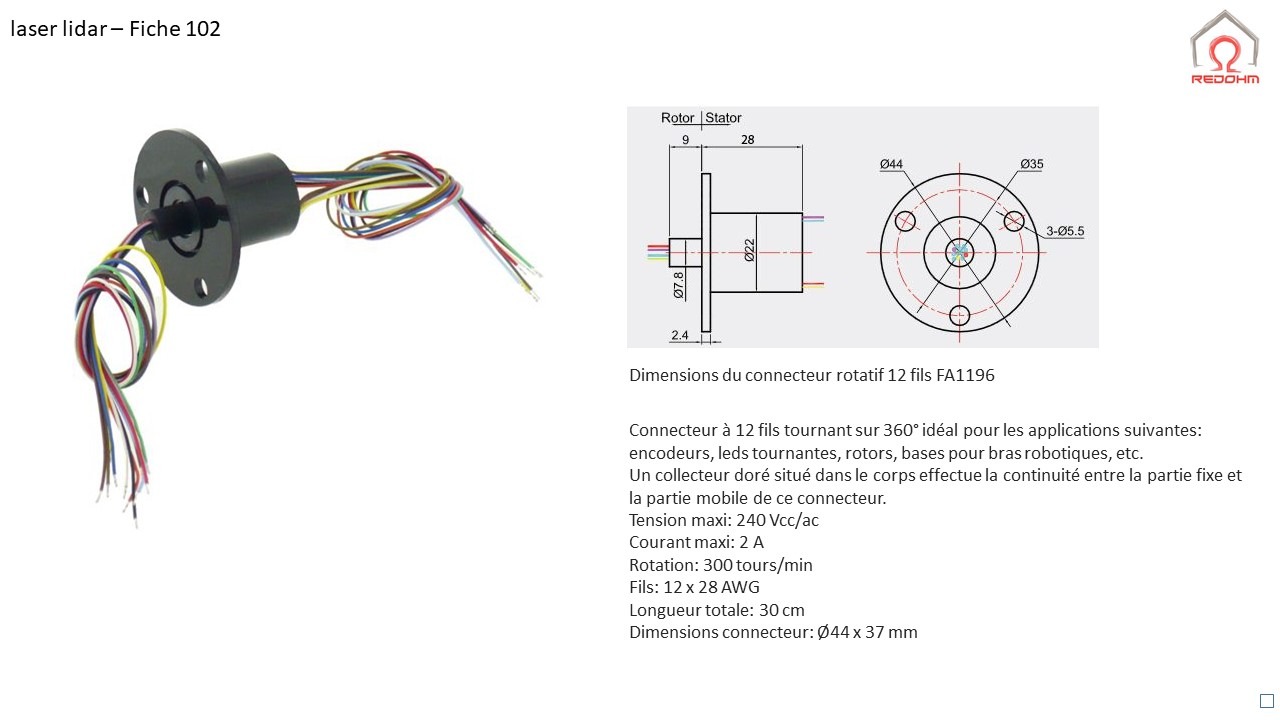
Laser lidar F102 – RedOhm
.
Retour au sommaire![]()
Eclaté de la tête du laser lidar – Fiche 110 |
.
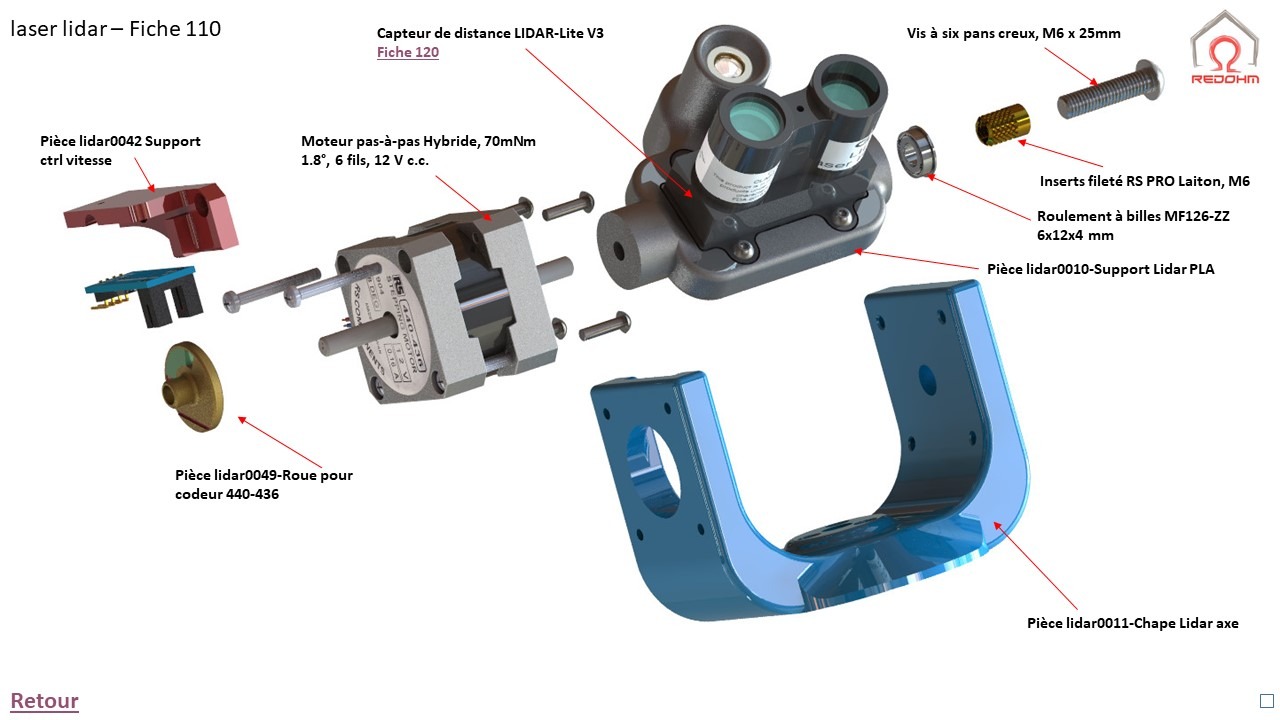
Laser lidar F110 – RedOhm
Pour tout probléme |
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse
.
Retour au sommaire.