
Mise à jour le 22/12/2019 : Dans cet article ,nous allons étudier comment installer, câbler, programmer un capteur de position pour cela , nous allons détourner le fonctionnement du module compteur de vitesse ECC 03
Sommaire :
- Description du montage
- Detournement de la fonction initiale du module compteur de vitesse EC03
- A suivre cet article est mis à jour régulièrement
- Retour au menu tutoriel .
![]()
Description du montage |
.
Les capteurs de fin de course doivent rendre compte que le déplacement est terminé ou bien nous définir une position pour l’initialisation d’une machine. Dans notre cas ,nous avons besoin de savoir où se trouve la tourelle du laser et l’inclinaison. Pour cela ,nous allons poser un capteur à fourche sur le grand pignon qui nous sert de rotation pour le laser et sur l’axe moteur pour l’inclinaison de celui-ci.
.
Retour au sommaire![]()
Detournement de la fonction initiale du module compteur de vitesse EC03 |
.
capteur EC03.
.
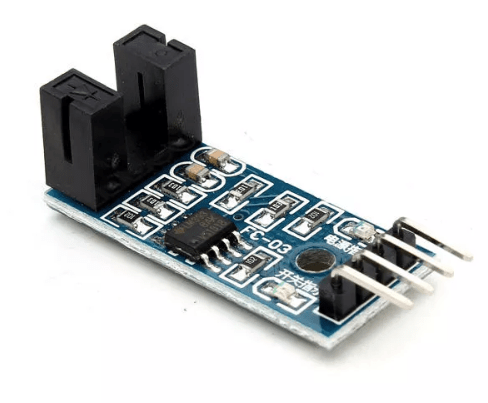
Présentation du capteur EC03.
Module compteur de vitesse basé sur un interrupteur optique à fourche. Il suffit d’ajouter un disque de comptage pour mesurer la vitesse d’un moteur par exemple.
Il se raccorde sur 1 entrée digitale d’un module à microcontrôleur (Arduino par exemple) et peut se fixer sur une plaque de connexions sans soudure.
Alimentation : 3,3 à 5 Vcc
Amplificateur : LM393
Brochage : 5Vcc, GND, OUT1
Ouverture : 5 mm
Dimensions : 32 x 15 x 13 mm
Spécifications de câblage :
- VCC : Connecter l’alimentation positive 3,3 ou 5 v
- GND : Connection sur le négatif d’alimentation
- Sortie : Signal de commutation DO TTL
- AO : La broche ne fonctionne pas
Distributeur :
.
Retour au sommaire