
–
Mise à jour le 21/11/2019 : Dans cet article, vous trouverez toutes les informations nécessaires pour l’utilisation des servomoteurs à rotation continue. De nombreux programmes , en particulier pour les cartes Arduino , seront développés pour l’utilisation de ses servo, vous trouverez aussi les schémas électriques et les documentations techniques nécessaires pour réaliser éventuellement vos projets.
Sommaire :
- Rappel du fonctionnement des servomoteurs à rotation continue.
- Programme d’évaluation d’une rampe d’accélération automatique pour servomoteur a rotation continue.
- Tutoriel sur la création d’une rampe d’acceleration ( vidéo )
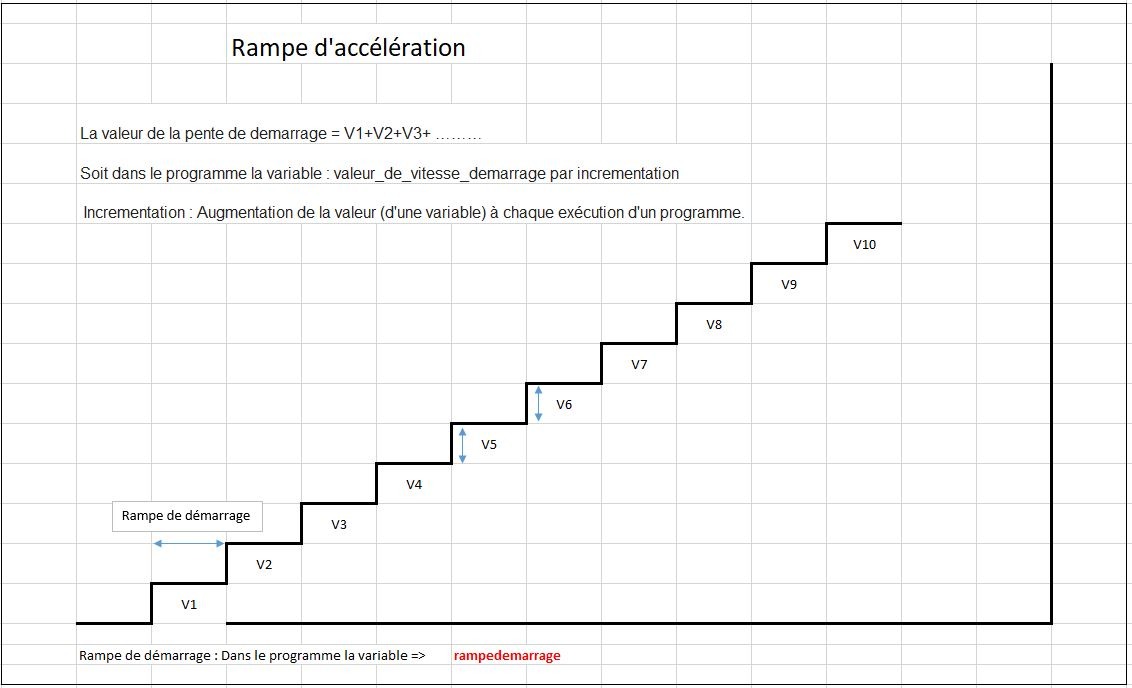
- Explication d’une rampe d’accélération par le dessin .
- Programme sur Arduino.
- Programme de pilotage de 2 servomoteurs à rotation continue pour la traction d’un robot mobile.
- Pour tout probléme
- Retour au sommaire de l’article sur les servomoteurs.
Retour au sommaire
.
Rappel du fonctionnement des servomoteurs à rotation continue |
Les servomoteurs à rotation continue se pilote de la même façon que les servomoteurs standards au moyen d’un signal « PWM » (avec des impulsions « hautes » comprises entre 1 à 2 ms env.).
Ces impulsions pourront être générées par un module arduino, Bluno Mega1280 etc …
Ne disposant d’aucune butée, ce servomoteur tourner dans les 2 sens de façon continue. Ainsi pour une largeur d’impulsion de l’ordre de 1,5 ms à son entrée, le servomoteur sera à l’arrêt.
Lorsque vous augmentez la largeur des impulsions, le servomoteur commencera à tourner dans un sens. Le servomoteur tourne de plus en plus vite au fur et à mesure que la largeur des impulsions d’approche des 2 ms (pour laquelle le servomoteur tournera alors à la vitesse max.).
Lorsque vous diminuez la largeur des impulsions (par rapport à la position médiane 1,5 ms), le servomoteur commencera à tourner dans l’autre sens. Le servomoteur tourne de plus en plus vite au fur et à mesure que la largeur des impulsions d’approche des 1 ms (pour laquelle le servomoteur tournera alors à la vitesse max.).
Quelques références de servomoteurs à rotation continue.
- Hitec HSR-1425 vitesse max => 52 t/mm sous 6Vcc chez Lextronic
- Couple 3.1 Kg/cm sous 6Vcc
- Feetech FS5103R vitesse max => 64 t/mm sous 6Vcc chez Gotronic
- Couple 3.2 Kg/cm sous 6Vcc
- Feetech FS5113R vitesse max => 64 t/mm sous 6Vcc chez Gotronic
- Couple 14 kg/cm sous 6 Vcc
.
Programme d’évaluation d’une rampe d’accélération automatique pour servomoteur a rotation continue |
- Une carte Arduino Mega 2560 : est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs.
- Module Grove Mega Shield V1.2 103020027 : Le module Grove Mega Shield est une carte d’interface permettant de raccorder facilement sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega.
- Servomoteur Feetech FS5113R à rotation sur 360° disposant d’un couple élevé et d’une pignonnerie métallique. Livré avec palonniers et vis de montage.
Rampe d’accélération pour servomoteur à rotation continue – RedOhm –
–
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 |
/* * * * RedOhm * * Programme evaluation d'une rampe d'acceleration automatique * pour servomoteur a rotation continue * * Version ID arduino 1.8.4 * * Le 08/09/2018 * H.Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> rouedroite Servo rouedroite; // Variable qui enregistre l'état du signal pour activer le servomoteur // par defaut la valeur est fixée à 1500 ce qui correspond en general à l'arret // du servomoteur ( pour un servomoteur à rotation continue ) int arret = 1500; // variable vitesse et de direction pour le servomoteur int temps = 0; // Declaration de la variable pour la rampe de demarrage int valeur_de_vitesse_demarrage; // Declaration de la variable pour la vitesse rampe de demarrage // unsigned long-> déclare une variable de type long non signé unsigned long rampedemarrage = millis(); /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécutée qu'une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur. Serial.begin(9600); // associe la variable rouedroite a sa broche en autre la numero 3 rouedroite.attach(3); // Écrit une valeur en microsecondes (uS) sur le servo, // la valeur par defaut etant 1500 ce qui correspond en // general à l'arret rouedroite.writeMicroseconds(arret); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // valeur de la base de temps 1 -> 1000ms soit 1 seconde // la ligne if effectue la difference entre le temps actuel et le // temps de debut de boucle .Cette derniere n'est interrompue que lorsque // cette différence = 100 millisecondes if ((millis ()-rampedemarrage>100)& ( valeur_de_vitesse_demarrage <= 100)) { rampedemarrage=millis(); // incrementation de la variable valeur de 1 soit -> valeur = valeur+1 valeur_de_vitesse_demarrage ++; Serial.print("valeur de la vitesse de demarrage =>"); Serial.print(valeur_de_vitesse_demarrage); Serial.print(" valeur de la pente de demarrage =>"); Serial.println(temps); } temps= valeur_de_vitesse_demarrage + arret ; // envoie de la valeur au servomoteur pour la rotation ou l'arret rouedroite.writeMicroseconds(temps); } |
| Retour au sommaire . |
–

Programme de pilotage de 2 servomoteurs à rotation continue pour la traction d’un robot mobile |
–
- Une carte Arduino Mega 2560 : est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs.
- Module Grove Mega Shield V1.2 103020027 : Le module Grove Mega Shield est une carte d’interface permettant de raccorder facilement sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega.
- Servomoteur Feetech FS5113R à rotation sur 360° disposant d’un couple élevé et d’une pignonnerie métallique.
- ou
- Servomoteur FS5103R à rotation continue
- ou
- Servomoteur HSR1425CR à rotation continue
| FS5113R | FS5103R | HSR1425CR |
| Alimentation : 4,8 à 6 Vcc. Course : 360° Couple : 14 kg.cm à 6 Vcc Vitesse à vide : 64 t/min à 6 Vcc Dimensions : 41 x 20 x 38 mm Poids : 56 gr. |
Alimentation : 4,8 à 6 Vcc. Course : 360° Couple : 3,2 kg.cm à 6 Vcc Vitesse : 64 t/min en 6 Vcc Dimensions: 41 x 20 x 38 mm Poids: 46 gr |
Alimentation : 4,8 à 6 Vcc. Course : 360°. Couple: 2,8 kg.cm. Vitesse : 43 t/min. Dimensions : 41 x 20 x 36 mm. Poids : 40 gr. |
Commande disponible dans ce programme =>
- a : Arrêt des servomoteurs
- c : Démarrage en marche avant avec rampe d’accélération
- v : Démarrage en marche arrière avec rampe d’accélération
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 |
/* * * * RedOhm * * Programme de pilotage de 2 servomoteurs à rotation continue * au menu mise en service de rampe d'acceleration , rotation * avant et arriere , et pilotage de l'ensemble par * clavier * * Peut être utilisé pour le deplacement d'un robot mobile * * Version ID arduino 1.8.4 * * Le 14/09/2018 * H.Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> rouedroite Servo rouedroite; // Crée un objet de type "Servo", nommé -> rouegauche Servo rouegauche; // Variable qui enregistre l'état du signal pour activer le servomoteur // par defaut la valeur est fixée à 1500 ce qui correspond en general à l'arret // du servomoteur ( pour un servomoteur à rotation continue ) int arret = 1500; // variable vitesse et de direction pour le servomoteur droit int tempsdroite; // variable vitesse et de direction pour le servomoteur gauche int tempsgauche; // Declaration de la variable pour la rampe de demarrage int valeur_de_vitesse_demarrage; // Declaration de la variable pour la vitesse rampe de demarrage // unsigned long-> déclare une variable de type long non signé unsigned long rampedemarrage = millis(); /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécutée qu'une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre du terminal côté PC doit être réglée sur la même valeur. Serial.begin(9600); Serial.println("*===========================================================*"); Serial.println("* *"); Serial.println("*Programme pour piloter *"); Serial.println("* 2 servomoteurs à rotation continue *"); Serial.println("* *"); Serial.println("*Fonctions disponibles *"); Serial.println("* a = arret des moteurs *"); Serial.println("* c = demarrage en marche avant avec rampe d'accélération *"); Serial.println("* v = demarrage en marche arriere avec rampe d'accélération *"); Serial.println("*===========================================================*"); // associe la variable rouedroite à sa broche numero 3 rouedroite.attach(3); // associe la variable rouegauche à sa broche numero 5 rouegauche.attach(5); // Écrit une valeur en microsecondes (uS) sur le servo, // la valeur par defaut etant 1500 ce qui correspond en // general à l'arret rouedroite.writeMicroseconds(arret); rouegauche.writeMicroseconds(arret); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { //Obtenez le nombre d'octets (caractères) disponibles pour //la lecture du port série. //dans notre cas soit la lettre w ou x ou a pour arret //ou r pour arriere ou v pour avant if(Serial.available()) { char commande = Serial.read(); if (commande == 'a') // demande d'arret { valeur_de_vitesse_demarrage = 0; Serial.println("Demande d'arret"); } // demande de demarrage avec rampe d'acceleration // et marche avant else if (commande == 'c') { // forçage de la variable valeur_de_vitesse_demarrage a = 0 valeur_de_vitesse_demarrage = 0 ; // Les boucles while bouclent indéfiniment, jusqu'à ce que la condition // ou l'expression entre les parenthèses ( ) devient fausse. Quelque chose // doit modifier la variable testée, sinon la boucle while ne se terminera // jamais. Cela peut être dans votre code, soit une variable incrémentée // , ou également une condition externe // dans notre programme la variable testée = valeur_de_vitesse_demarrage while(valeur_de_vitesse_demarrage < 100) { // valeur de la base de temps 1 -> 1000ms soit 1 seconde // la ligne if effectue la difference entre le temps actuel et le // temps de debut de boucle .Cette derniere n'est interrompue que lorsque // cette difference = 1000 millisecondes soit 1 seconde if ((millis ()-rampedemarrage>50)& ( valeur_de_vitesse_demarrage <= 100)) { rampedemarrage=millis(); // incrementation de la variable valeur de 1 soit -> valeur = valeur+1 valeur_de_vitesse_demarrage ++; // Affichage sur le moniteur serie des informations // Serial.print("valeur de la vitesse de demarrage =>"); Serial.print(valeur_de_vitesse_demarrage); Serial.print(" valeur de la pente de demarrage a droite =>"); Serial.print(tempsdroite); Serial.print(" "); Serial.println(tempsgauche); // calcul pour la marche avant pour la roue gauche avec acceleration tempsgauche = arret + valeur_de_vitesse_demarrage ; // calcul pour la marche avant pour la roue droite avec acceleration tempsdroite = arret - valeur_de_vitesse_demarrage ; // envoie de la valeur au 2 servomoteurs pour le // demarrage avec rampe d'acceleration rouedroite.writeMicroseconds(tempsdroite); rouegauche.writeMicroseconds (tempsgauche); } } } // demande de demarrage avec rampe d'acceleration // et marche arriere else if (commande == 'v') { // forçage de la variable a = 0 valeur_de_vitesse_demarrage = 0 ; while(valeur_de_vitesse_demarrage < 100) { // valeur de la base de temps 1 -> 1000ms soit 1 seconde // la ligne if effectue la difference entre le temps actuel et le // temps de debut de boucle .Cette derniere n'est interrompue que lorsque // cette difference = 1000 millisecondes soit 1 seconde if ((millis ()-rampedemarrage>50)& ( valeur_de_vitesse_demarrage <= 100)) { rampedemarrage=millis(); // incrementation de la variable valeur de 1 soit -> valeur = valeur+1 valeur_de_vitesse_demarrage ++; // Affichage sur le moniteur serie des informations // Serial.print("valeur de la vitesse de demarrage =>"); Serial.print(valeur_de_vitesse_demarrage); Serial.print(" valeur de la pente de demarrage a droite =>"); Serial.print(tempsdroite); Serial.print(" "); Serial.println(tempsgauche); // calcul pour la marche arriere pour la roue gauche avec acceleration tempsgauche = arret - valeur_de_vitesse_demarrage ; // calcul pour la marche arriere pour la roue droite avec acceleration tempsdroite = arret + valeur_de_vitesse_demarrage ; // envoie de la valeur au 2 servomoteurs pour le // demarrage avec rampe d'acceleration en marche arriere rouedroite.writeMicroseconds(tempsdroite); rouegauche.writeMicroseconds (tempsgauche); } } } } tempsgauche = arret + valeur_de_vitesse_demarrage ; tempsdroite = arret - valeur_de_vitesse_demarrage ; // envoie de la valeur au 2 servomoteurs pour rouedroite.writeMicroseconds(tempsdroite); rouegauche.writeMicroseconds (tempsgauche); } |
| Retour au sommaire . |
Pour tout problème |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour en haut de page.