
–
Mise à jour le 02/05/2018 : Cette modification ( Upgrade ) de l’avant bras de Maya avec la trappe de visite – RedOhm – du bras du robot Maya que nous vous soumettons rentre dans un cadre d’amélioration. Mais si vous avez un budget restreint, vous pouvez rester sur la version d’origine sans aucun problème.
- L’avant-bras avec la trappe de visite est là surtout pour une facilité de câblage et de maintenance.
-
Le servomoteur du coude est là pour améliorer la puissance de l’avant-bras ,les deux versions fonctionnent sans aucun problème.
Upgrade de l’avant bras
–
Sommaire :
- Pourquoi upgrader l’avant bras et la motorisation du coude ?
- Recapitulatif en vidéo des opérations d’améliorations.
- Les differentes vue en Cao
- Les schemas electriques ( en cours )
- Fichier pour impression des pieces . ( en cours )
- Retour au menu principal
Pourquoi upgrader l’avant bras et la motorisation du coude ? |
Pourquoi upgrader le robot Maya alors qu’il vient tout juste de sortir ? Simplement pour optimiser au mieux les fonctionnalités et les performances de ce robot. Il est vrai qu’à partir du démarrage du projet à sa réalisation, il se passe de nombreux mois voir, une année. La technologie évoluant, les possibilités d’amélioration sont à nouveau possibles. Comme nous utilisons notre robot Maya en labo, nous nous apercevons des défauts de conception, des problèmes de maintenance etc … donc, nous essayons d’y remédier.
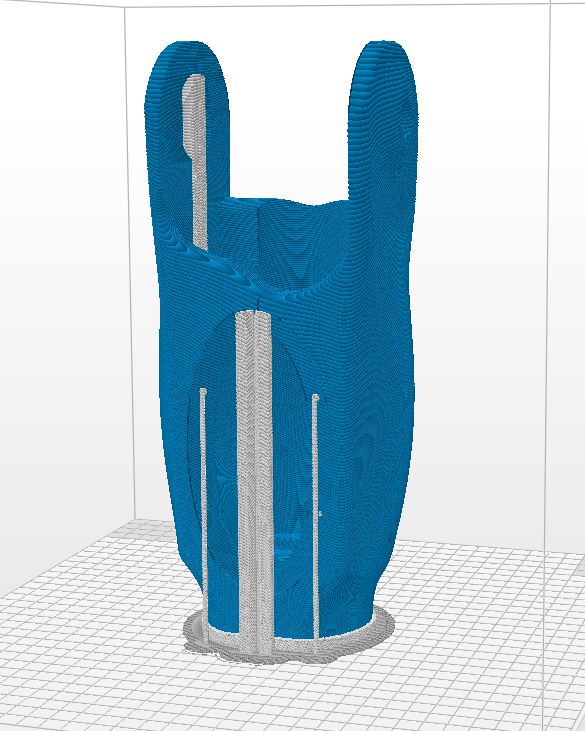
Impression de l’avant bras de Maya
La première modification réalisée sur notre robot, est la réalisation d’une trappe de visite sur l’avant-bras. Pour cette carte de visite, nous avons opté pour une trappe en forme d’ellipse ce qui entraîne moins de supports pour sa réalisation lors de l’impression 3D. Cette forme nous apporte un rendu visuel qui se marie nettement mieux avec les courbes de l’avant-bras de Maya.
Nous avons aussi gagné du poids sur l’avant-bras, nous sommes passés de 540 g à 420 g à densité égale. Cet allégement de structure nous permet de gagner en performance.
.

Servomoteur D845WP
Nous avons aussi effectué une modification dans le coude.Nous avons changé le servomoteur de transmission. Nous sommes donc passés d’un servomoteur développant un couple de 24 kg.cm par un servomoteur D845WP de chez Hitec possédant un couple de 50 kg.cm sous une tension de 7.4V. En choisissant ce type de servomoteur, cela nous a permis d’éviter la modification sur la partie support.
Cette dernière modification et là pour augmenter les performances de l’avant-bras de Maya. L’utilisateur pourra choisir quel type de servomoteur qui lui convient le mieux par rapport à son application.
Caractéristiques techniques du servomoteur D845WP
- Modèle : D845WP
- Longueur : 66 mm
- Largeur : 32 mm
- Hauteur : 62 mm
- Poids : 227g
- Couple sous 4.8V : 324 Ncm
- Couple sous 6V : 402 Ncm
- Couple sous 7.4V : 490 Ncm
- Temps de réglage sous 4.8V : 0,26s ( 60°)
- Temps de réglage sous 6V : 0,21s ( 60°)
- Temps de réglage sous 7.4V : 017s ( 60°)
- Entrainement : métal
- Type de roulement : Double roulement à billes
- Technologie du servomoteur : Numérique
- Fabricant : Hitec
| Retour au sommaire . |
Récapitulatif en vidéo des opérations d’améliorations. |
–
| Retour au sommaire . |
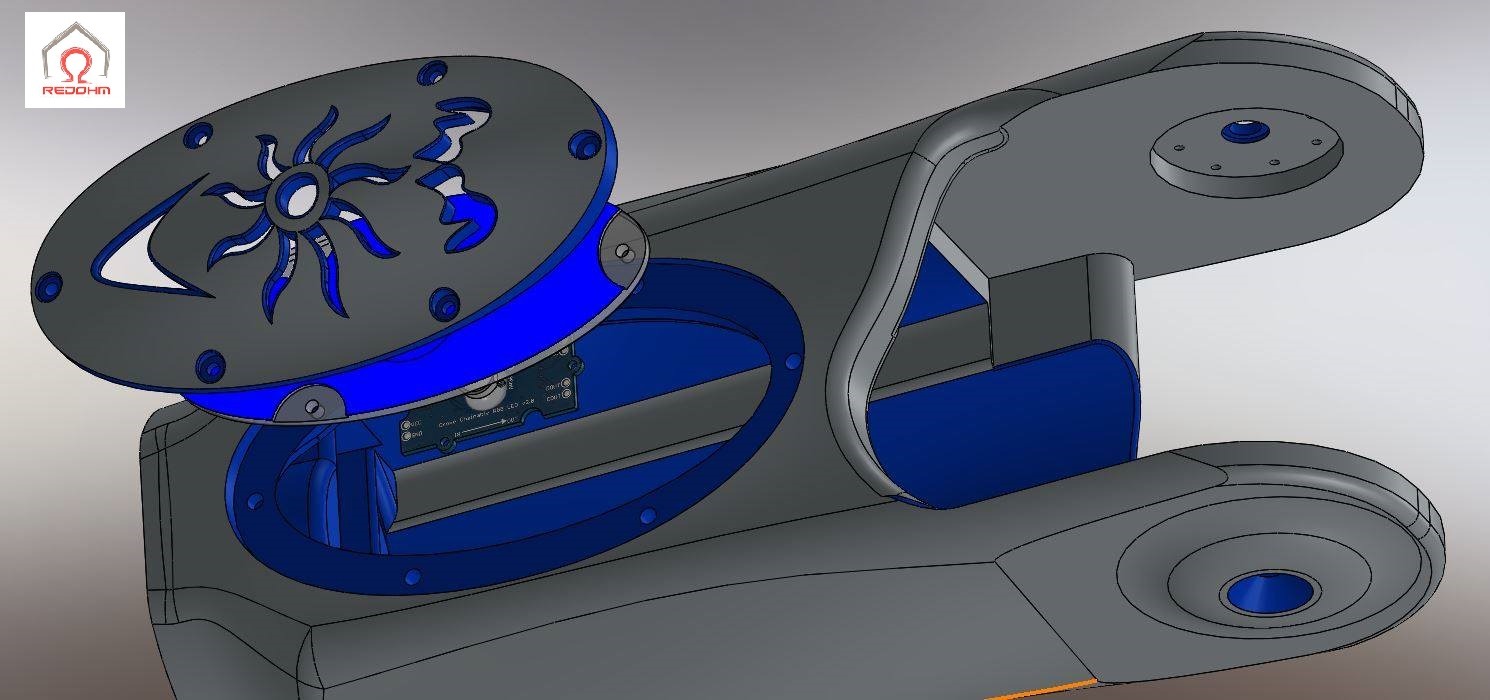
[ Upgrade ] Les differentes vue en Cao |
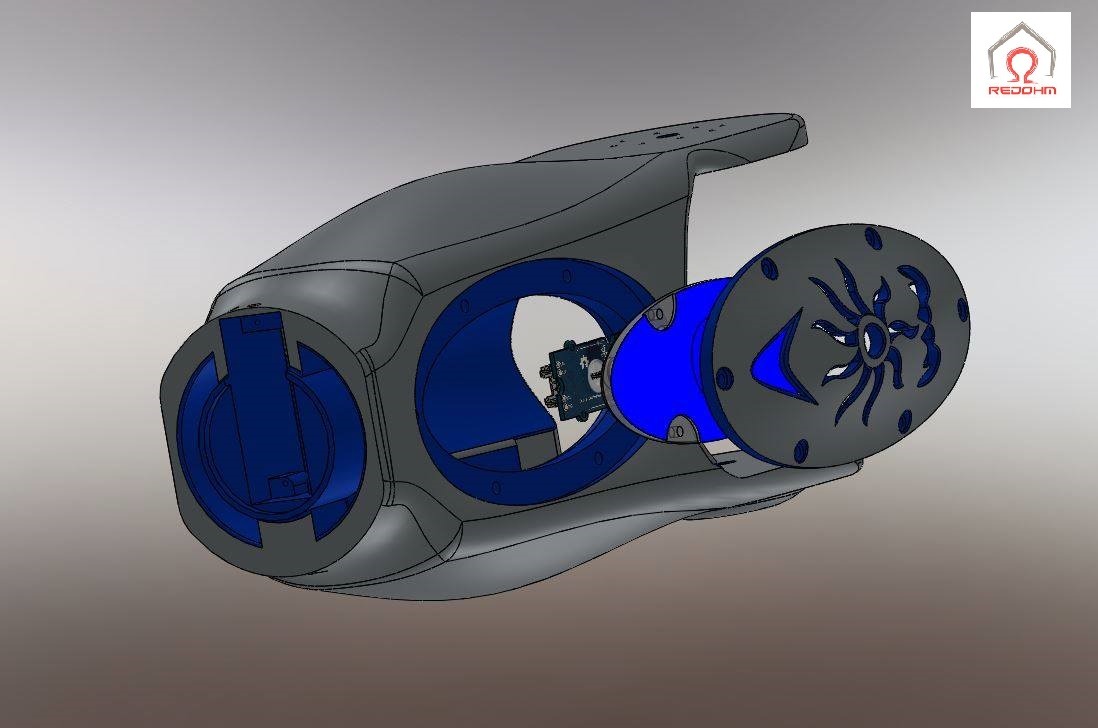
Upgrade de l’avant bras de Maya avec la trappe de visite – RedOhm –
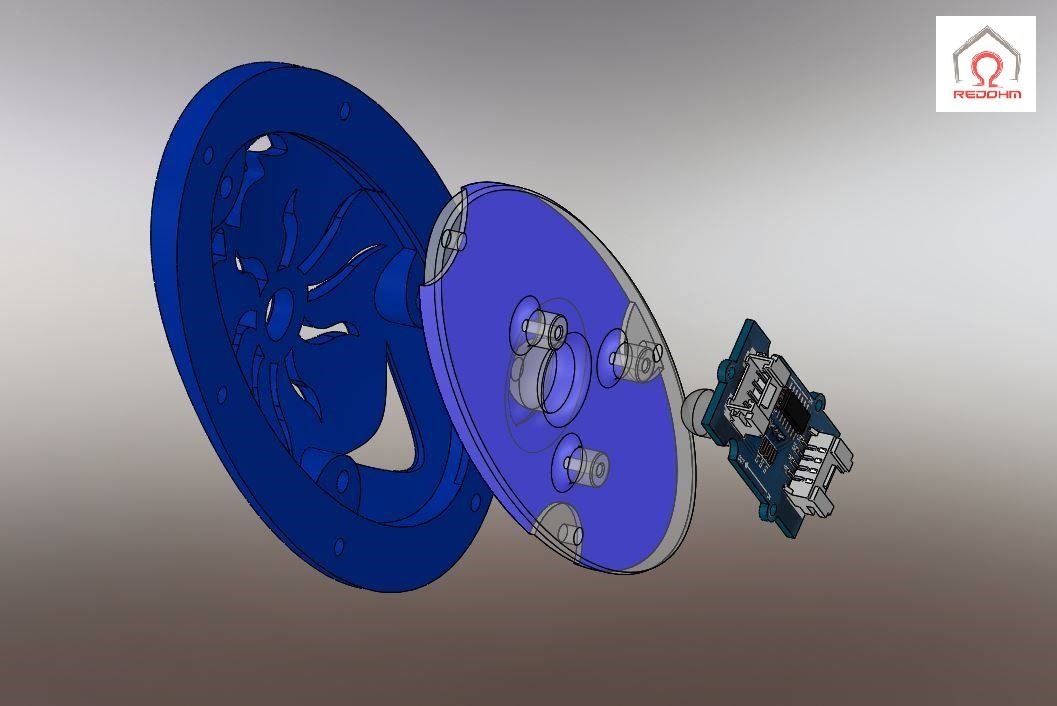
Trappe de visite avec le support Led – RedOhm –
Trappe de visite – RedOhm –
_
| Retour au sommaire . |