
***
Mise à jour le 09/05/2018.
Sommaire :
- Information sur les schéma du robot Maya
- Principe de la masse commune sur le robot Maya
- Principe de repérage sur les schémas électriques.
- Plusieurs tensions d’alimentation sont disponibles pourquoi ?
- Ensemble du schéma électrique ( à suivre )
- Folio 44 : Repérage des éléments du visage
- Folio 48 : Repérage des cartes dans l’encéphale
- Folio 50 : Carte Arduino n2 ( les lèvres )
- Folio 52 : Carte Arduino n1 ( carte œil gauche )
- Folio 54 : Carte Arduino n3 ( carte œil droit )
- Folio 100 : Pilotage des mouvements de la tête de Maya
- Folio 101 : Circuit de cablage rotation thorax et visiére ( New )
- Folio 159 : Repérage des actionneurs de la main droite
- Folio 160 : Câblage gant replicator main droite
- Folio 162 : Câblage du bras droit 1/2 avec ou sans exosquelette ( New )
- Folio 180 : Câblage gant replicator main gauche
- Folio 182 : Câblage du bras gauche 1/2 avec ou sans exosquelette
- Folio 184 : Câblage du bras gauche 2/2 avec ou sans exosquelette
Information |
Principe de la masse commune sur le robot Maya.
Vous remarquerez sur l’ensemble des schémas nous relions toutes les masses des alimentations ensemble d’où le nom de masse commune. Il faut savoir que la masse dans un circuit électrique, est la branche de référence des potentiels électriques. Dans la grande majorité des cas le potentiel électrique de cette branche est la référence 0 V du circuit considéré.
Principe de repérage sur les schémas électriques.
Comment interpréter le numéro de fils sur le schéma. Prenons le cas du fils nommé 10–70 nous avons déjà le numéro de folio qui apparaît, dans ce cas le folio 10, derrière le tiret nous aurons le numéro de fils sur ce même folio dans ce cas nous avons le fil 70. Imaginez-vous, vous trouver avec un fil débranché dont le numéro est 17–30, imaginez la facilité pour rebrancher le fil, il suffit de consulter le folio 17 pour retrouver sur quel organe ce fil était branché.
Plusieurs tensions d’alimentation sont disponibles pourquoi ?
Pour optimiser le fonctionnement des servomoteurs, nous travaillerons avec leurs tensions Max pour avoir le couple maximum de l’appareil concerné. Sur Maya nous avons des servomoteurs avec des tensions max de 6 V et des tensions de 7.4 V pour les servomoteurs plus importants. Nous possédons aussi une tension de 12 V appelée moteur, cette tension est réservée à l’alimentation des moteurs de déplacement, et enfin nous avons une tension d’alimentation appelée 12 V commande. Cette tension est séparée des autres pour éviter les perturbations engendrées par les différents moteurs.
| Retour au sommaire |
Folio 44 : Repérage des éléments du visage |
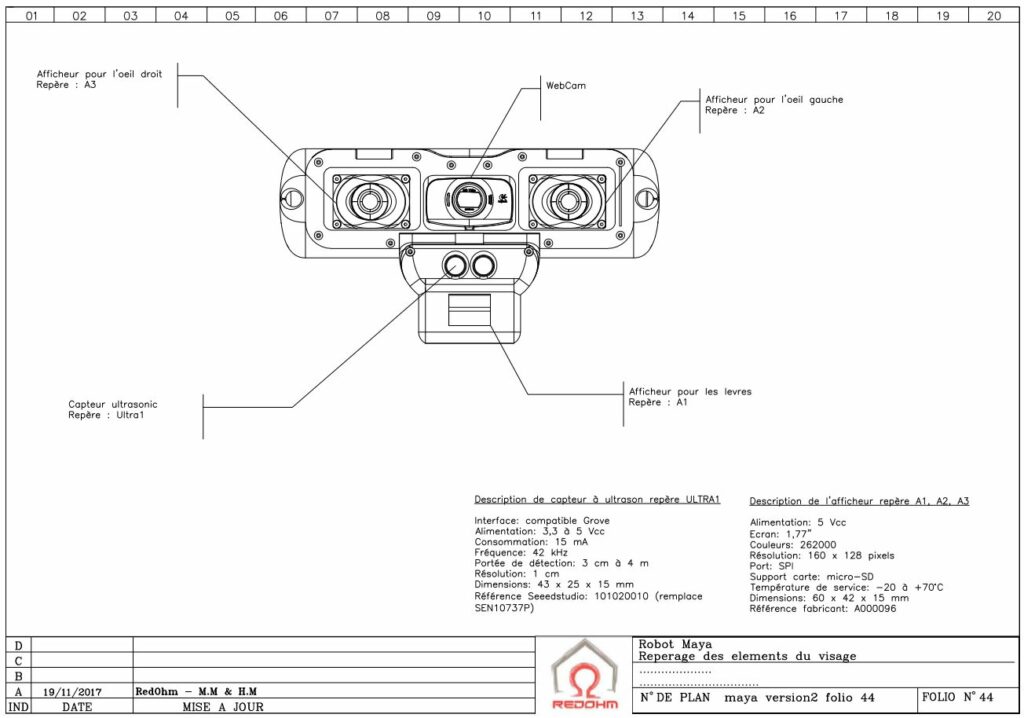
Folio 44 version 2 – Schéma du robot Maya
| Retour au sommaire |
Folio 48 : Repérage des cartes dans l’encéphale |
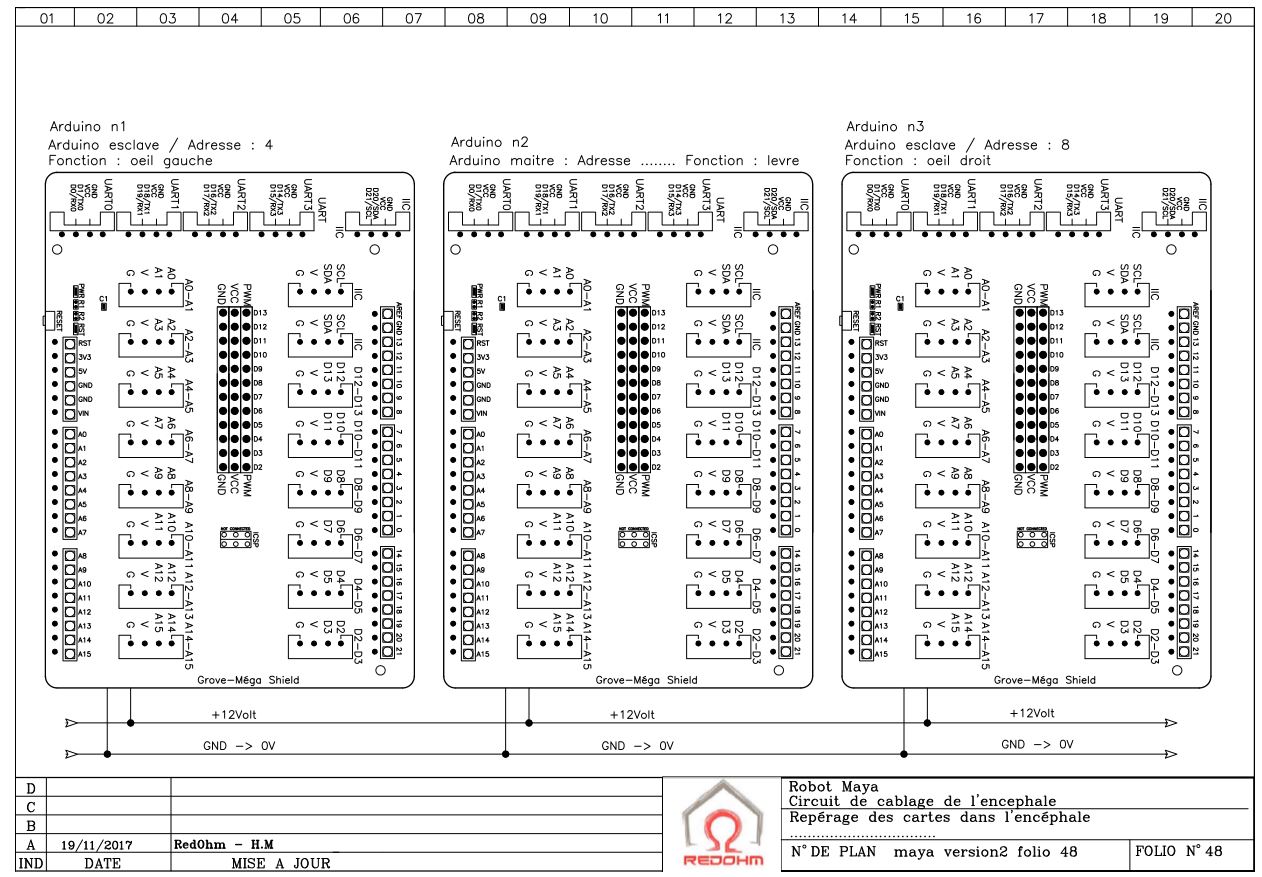
Folio 48 : Repérage des cartes dans l’encéphale
| Retour au sommaire |
Folio 50 : Carte Arduino n2 ( avec méga Grove ) |
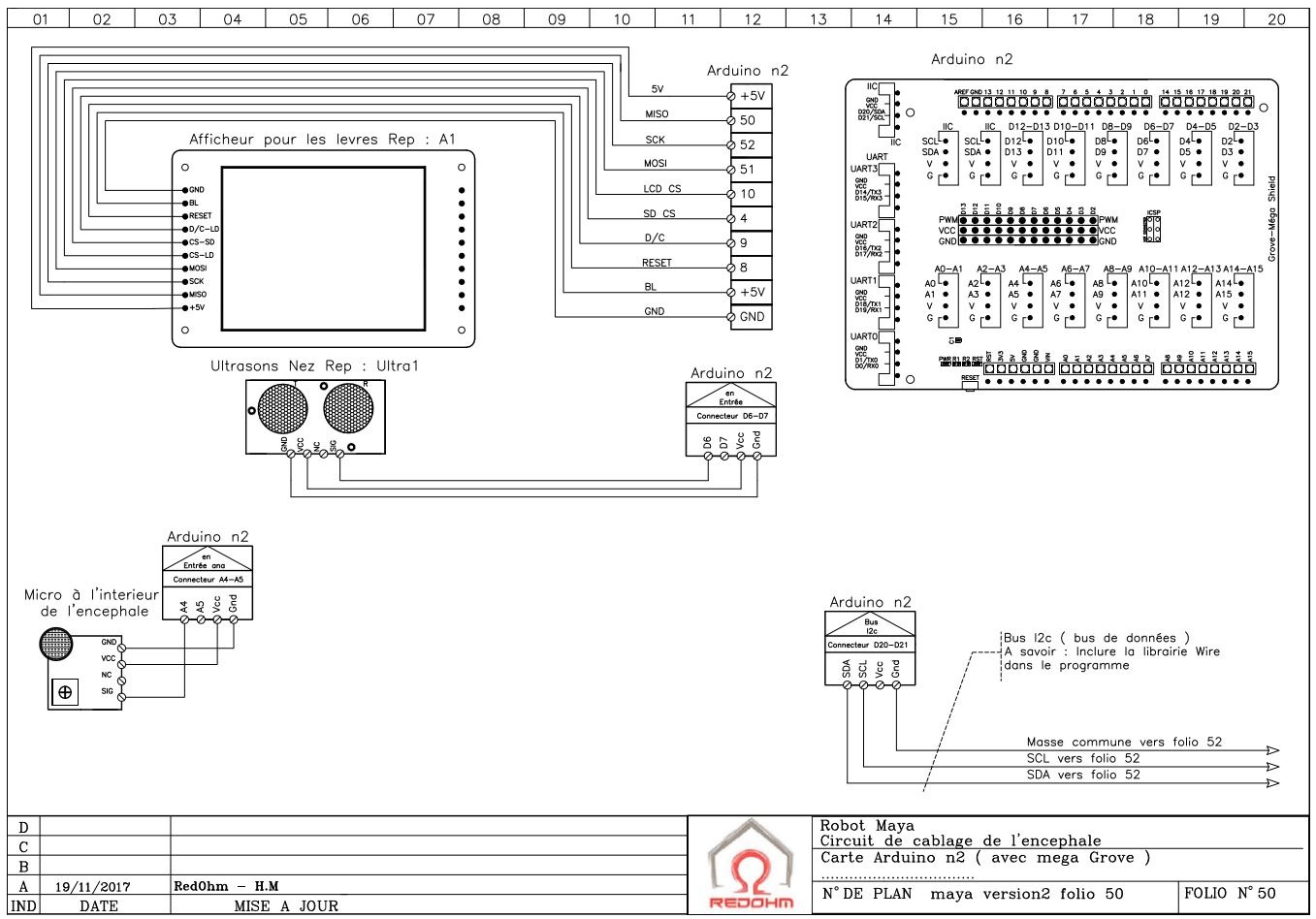
Folio 50 version 2 – Schéma du robot Maya
| Retour au sommaire |
Folio 52 : Carte Arduino n1 ( carte œil gauche ) |
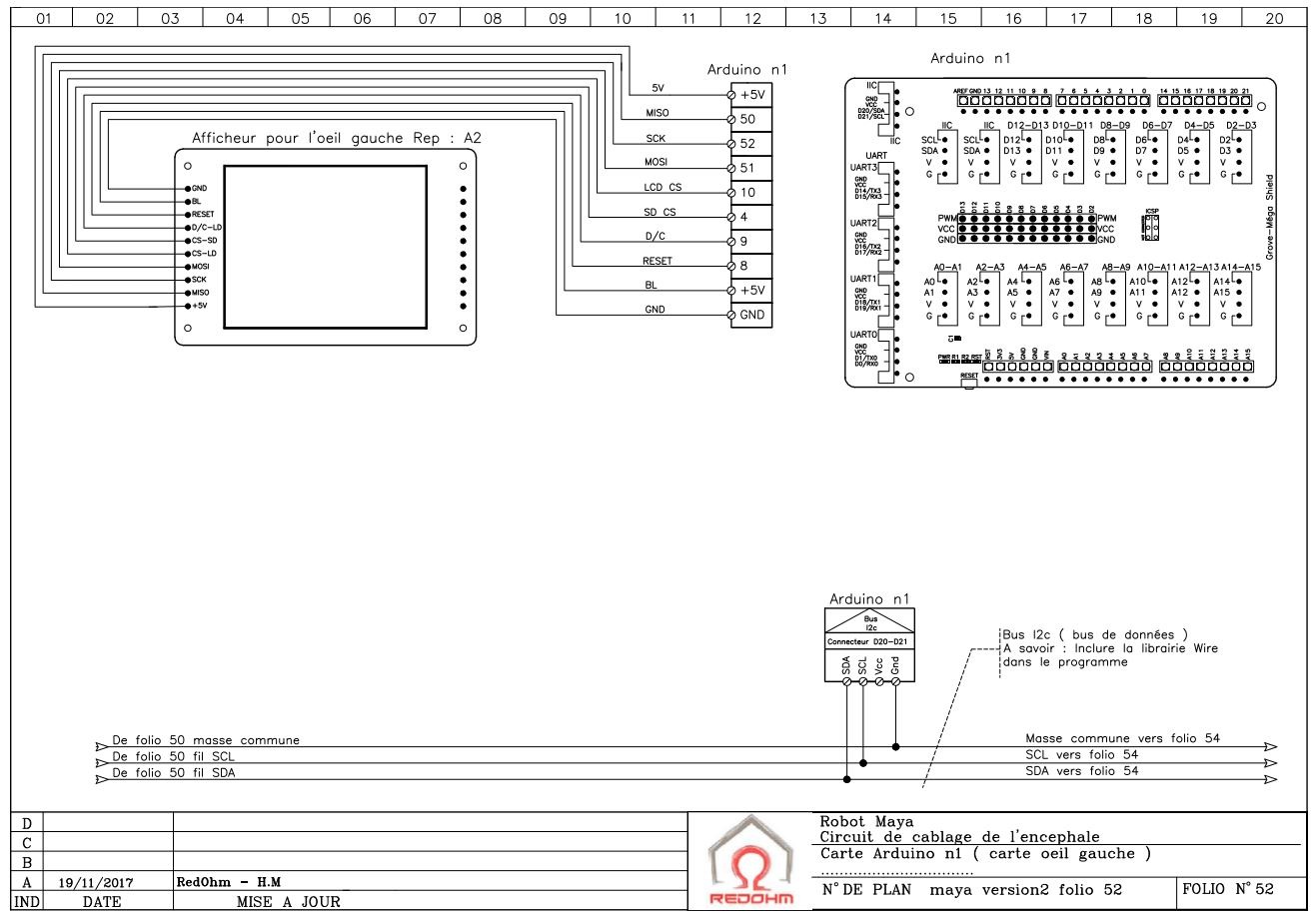
Folio 52 version 2 – Schéma du robot Maya
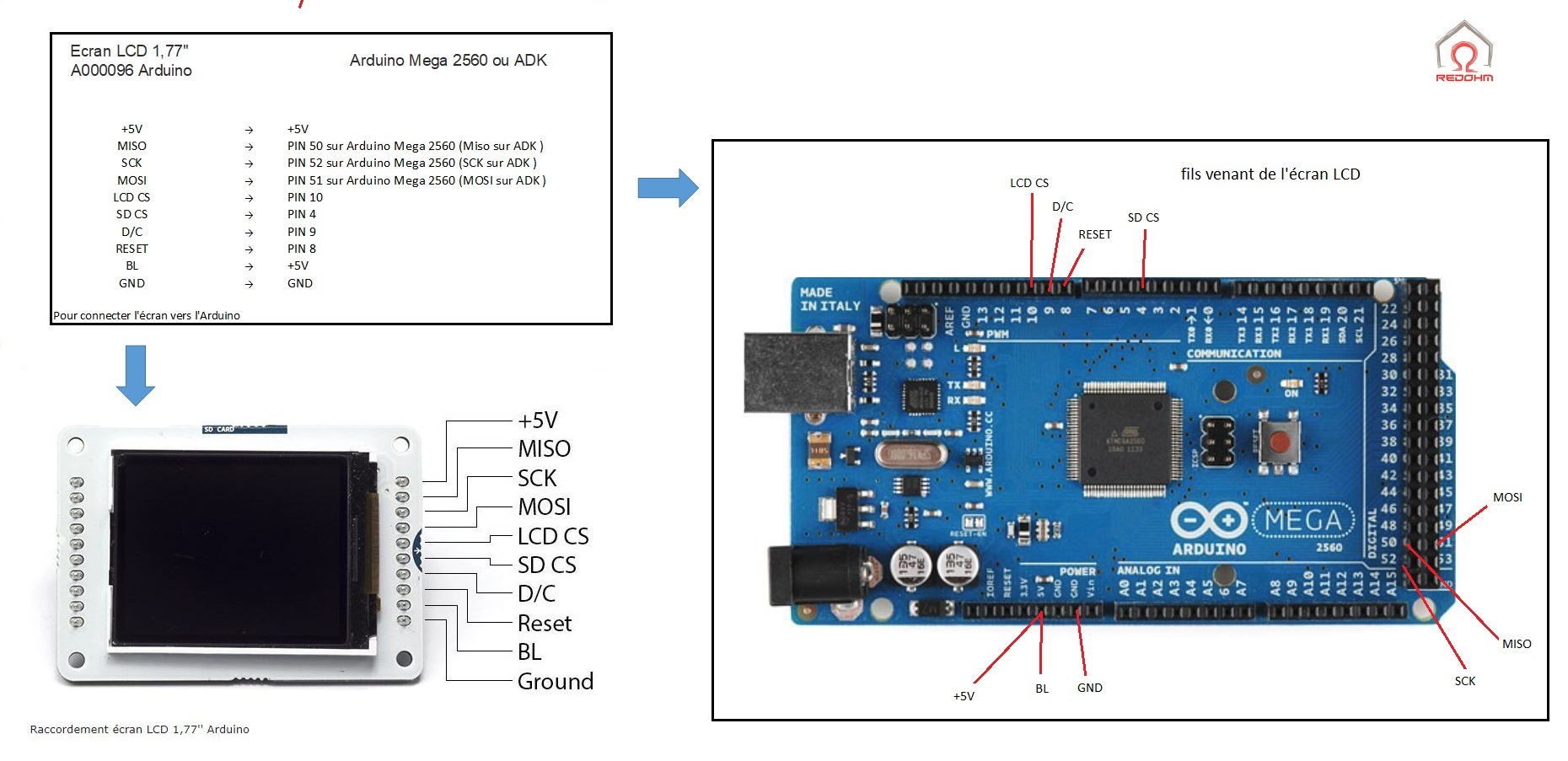
Aide au câblage de l’écran Lcd A000096 sur une carte Arduino Mega ou ADK
–
| Retour au sommaire |
Folio 54 : Carte Arduino n3 ( carte œil droit ) |
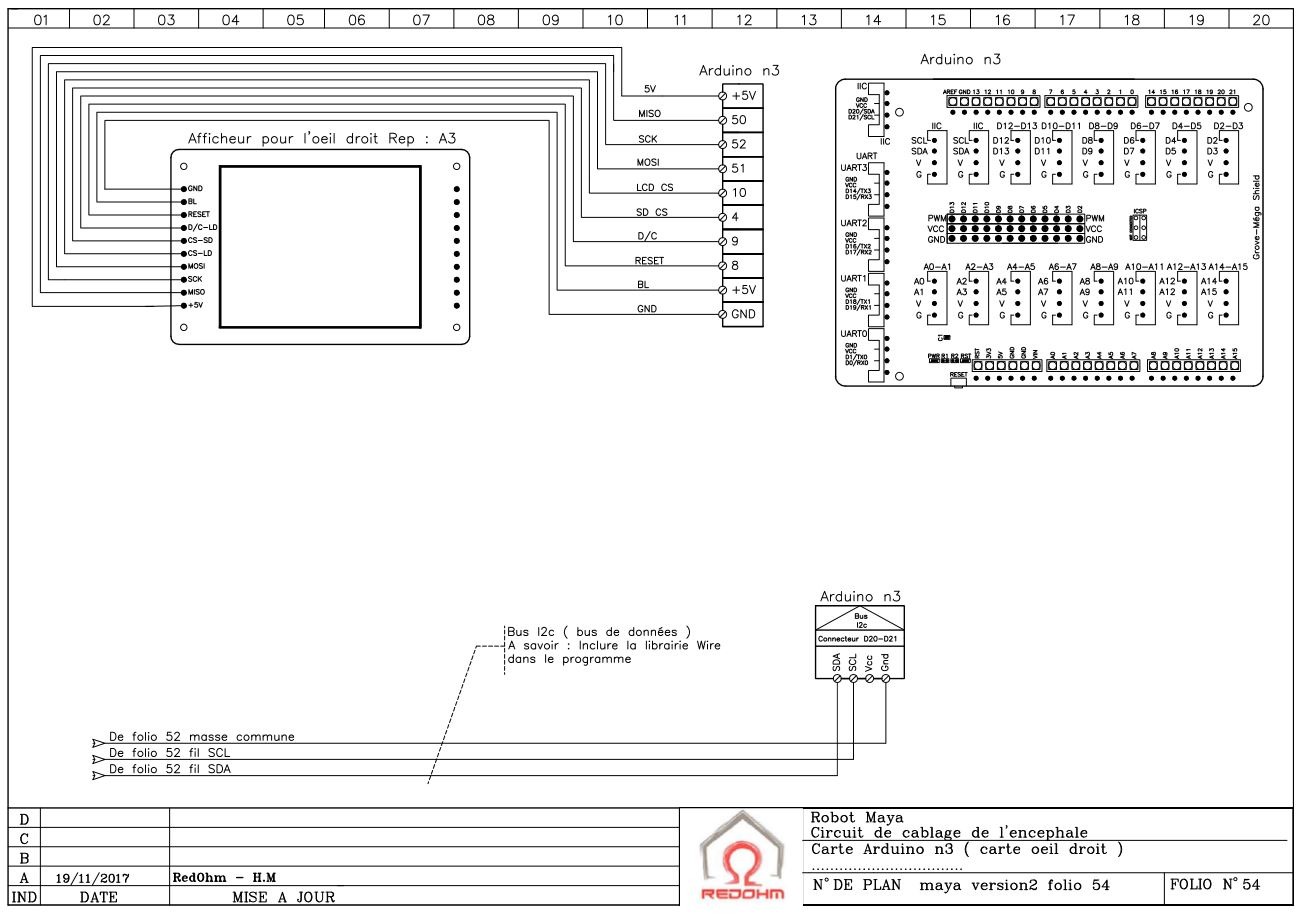
Folio 54 version 2 – Schéma du robot Maya
Aide au câblage de l’écran Lcd A000096 sur une carte Arduino Mega ou ADK
–
–
| Retour au sommaire |
Folio 100 : Carte Ez-Robot1 |
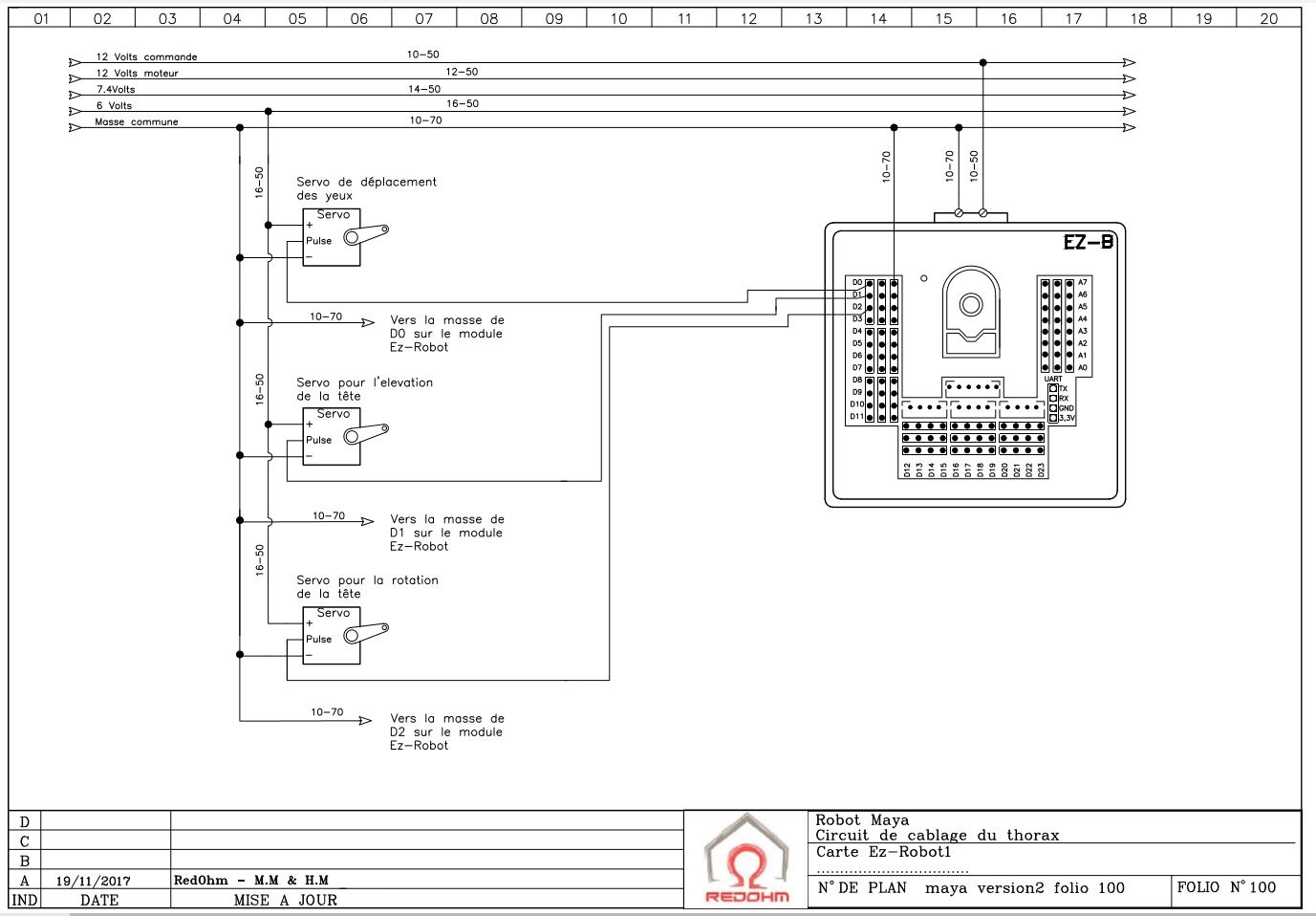
Folio 100 version 2 – Schéma du robot Maya ( Pilotage des mouvements de la tête de Maya )
| Retour au sommaire |
Folio 101 : Carte Ez-Robot1
|
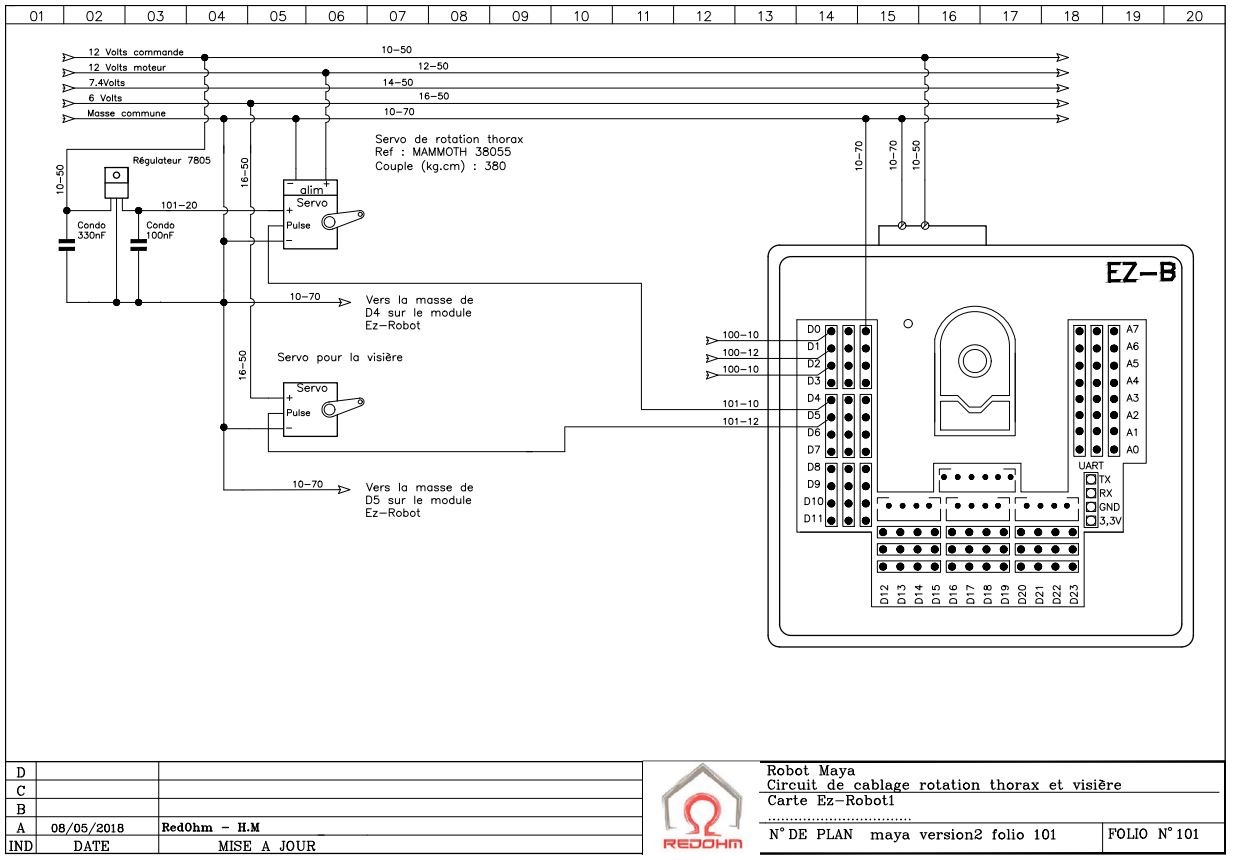
Folio 101 version 2 – Schéma du robot Maya ( Circuit de cablage rotation thorax et visiére )
| Retour au sommaire |
Folio 159 : Repérage des actionneurs de la main droite |
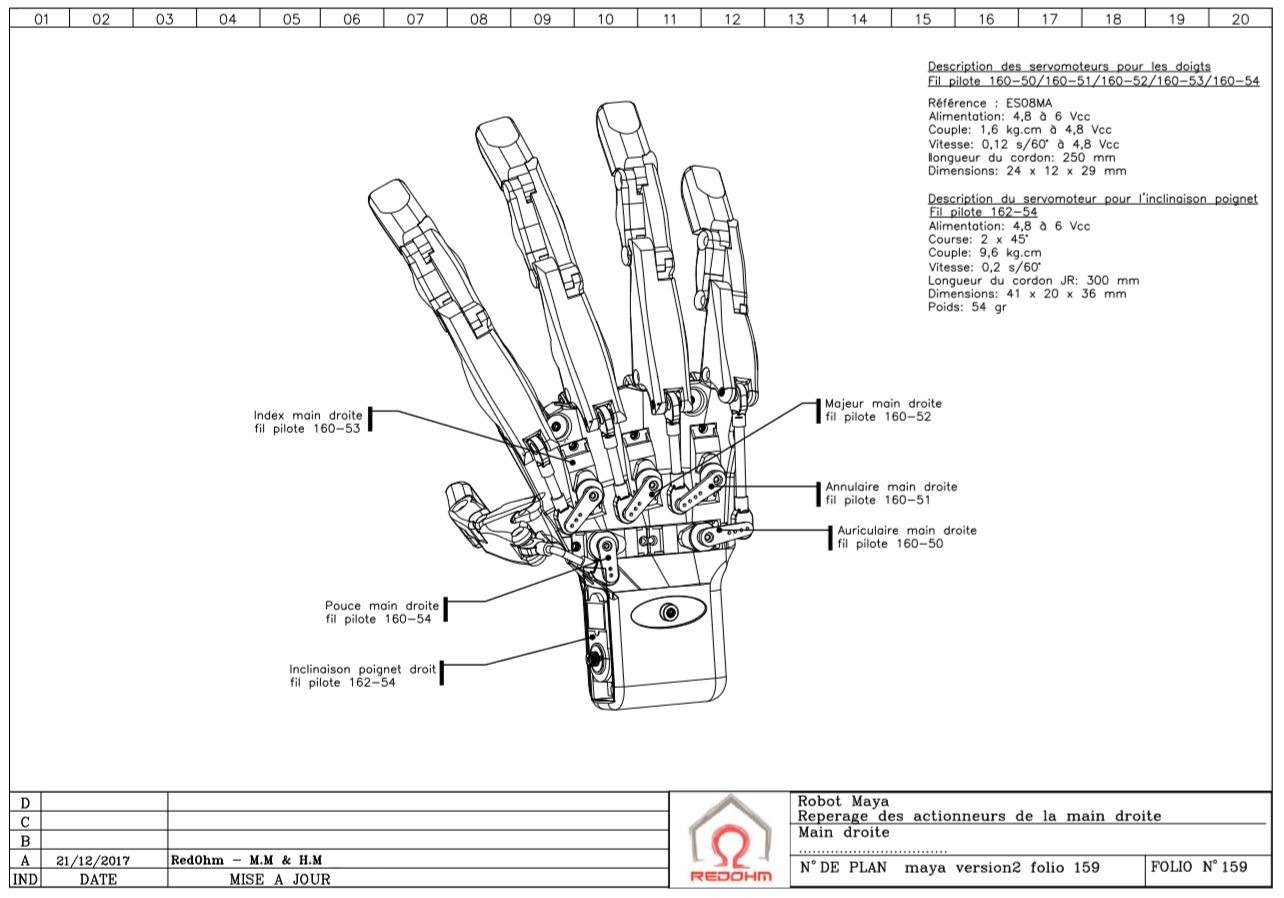
Folio 159 version 2 – Schéma du robot Maya ( Repérage des actionneurs de la main droite )
| Retour au sommaire |
Folio 160 : Carte Arduino160
|
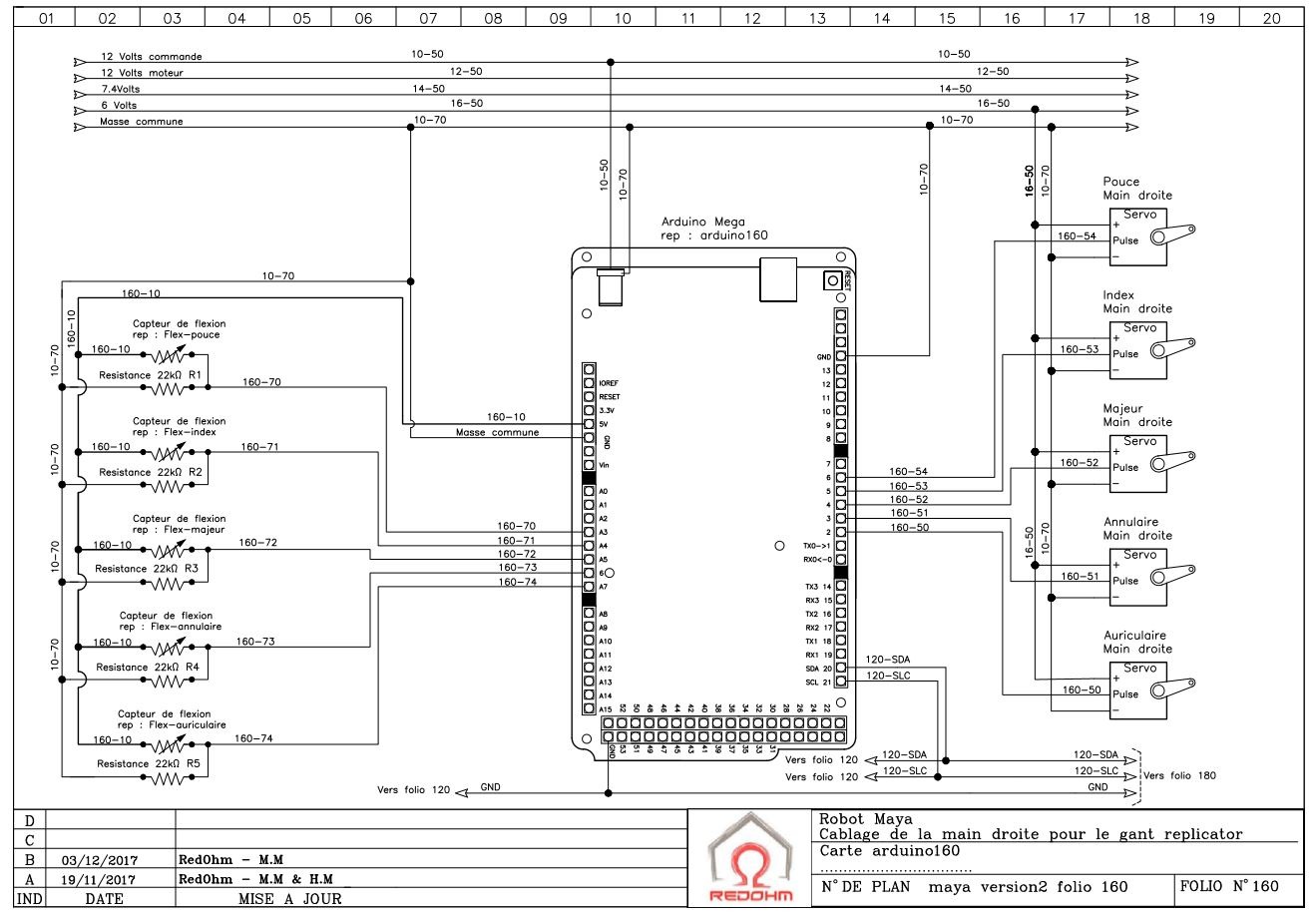
Folio 160 version 2 – Schéma du robot Maya ( câblage gant replicator main droite )
| Retour au sommaire |
Folio 162 : Carte Arduino160
|
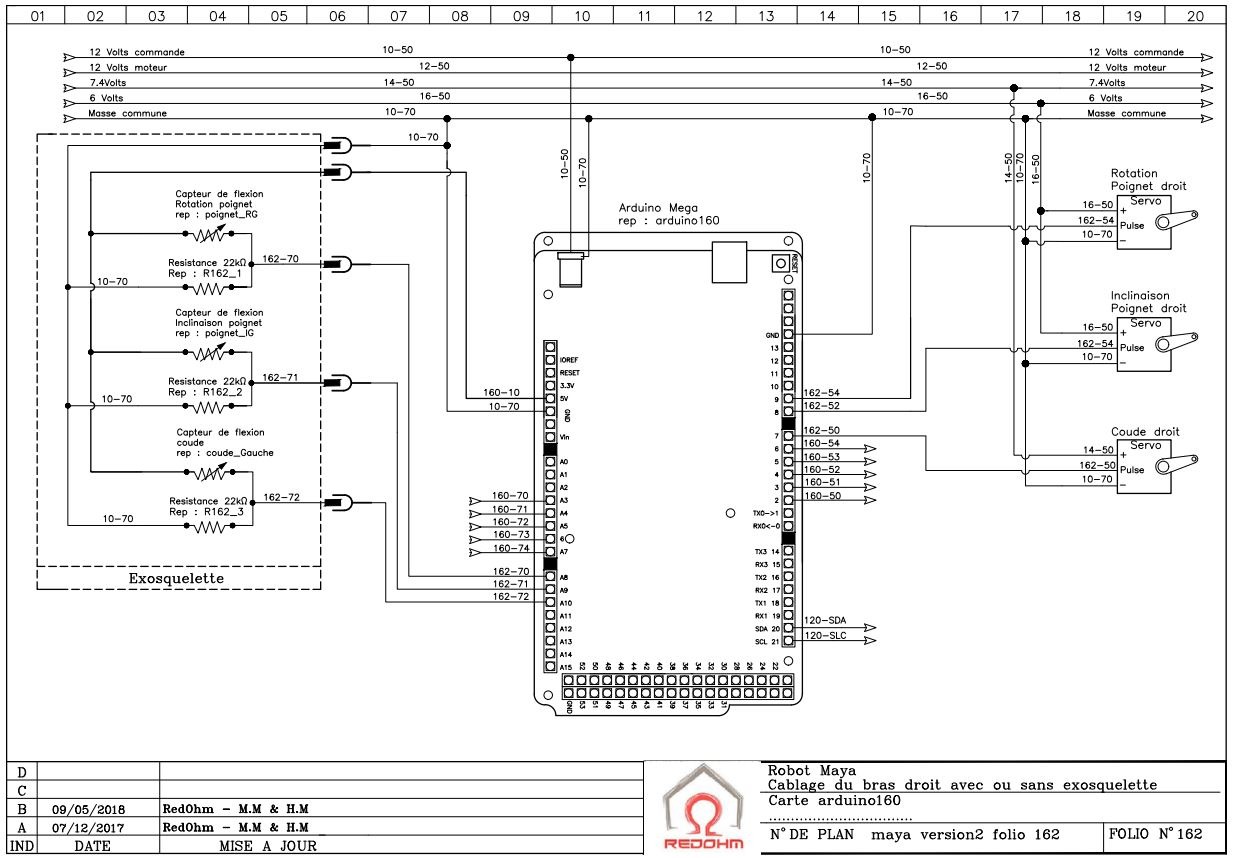
Folio 162 version 2 – Schéma du robot Maya ( câblage du bras droit 1/2 avec ou sans exosquelette )
| Retour au sommaire |
Folio 180 : Carte Arduino
|
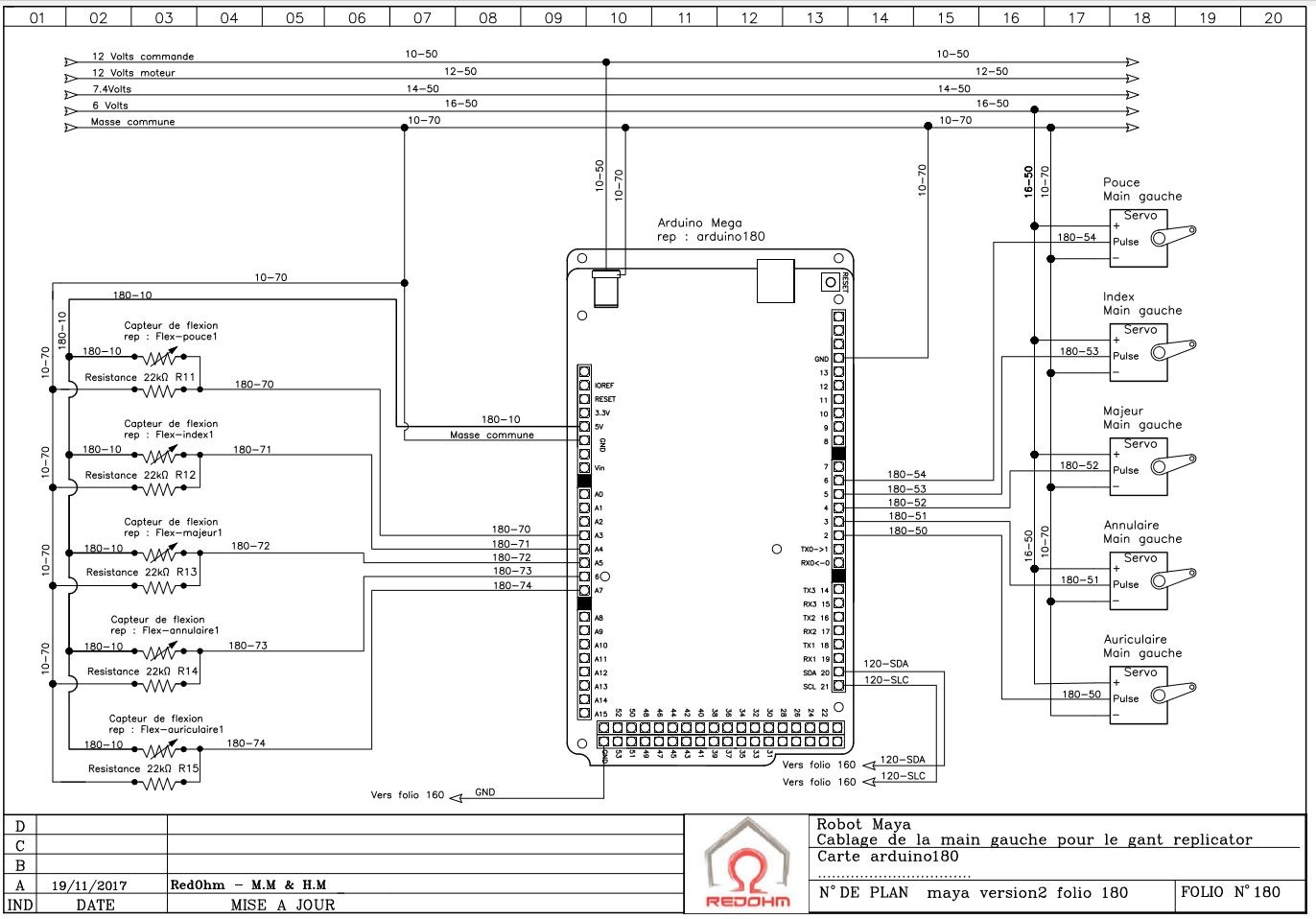
Folio 180 version 2 – Schéma du robot Maya ( câblage gant replicator main gauche )
| Retour au sommaire |
Folio 182 : Carte Arduino180
|
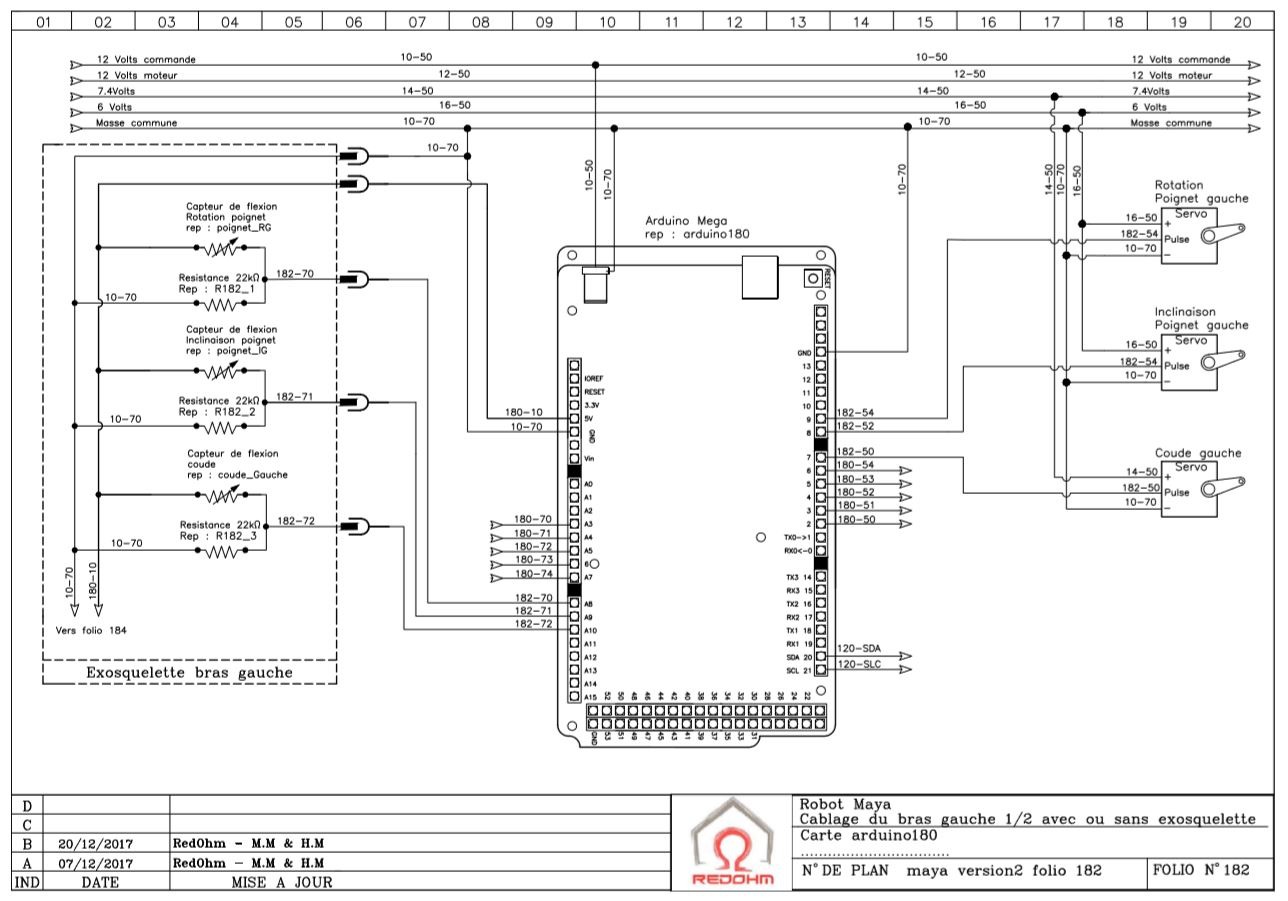
Folio 182 version 2 – Schéma du robot Maya ( câblage du bras gauche 1/2 avec ou sans exosquelette )
| Retour au sommaire |
Folio 184 : Carte Arduino180
|
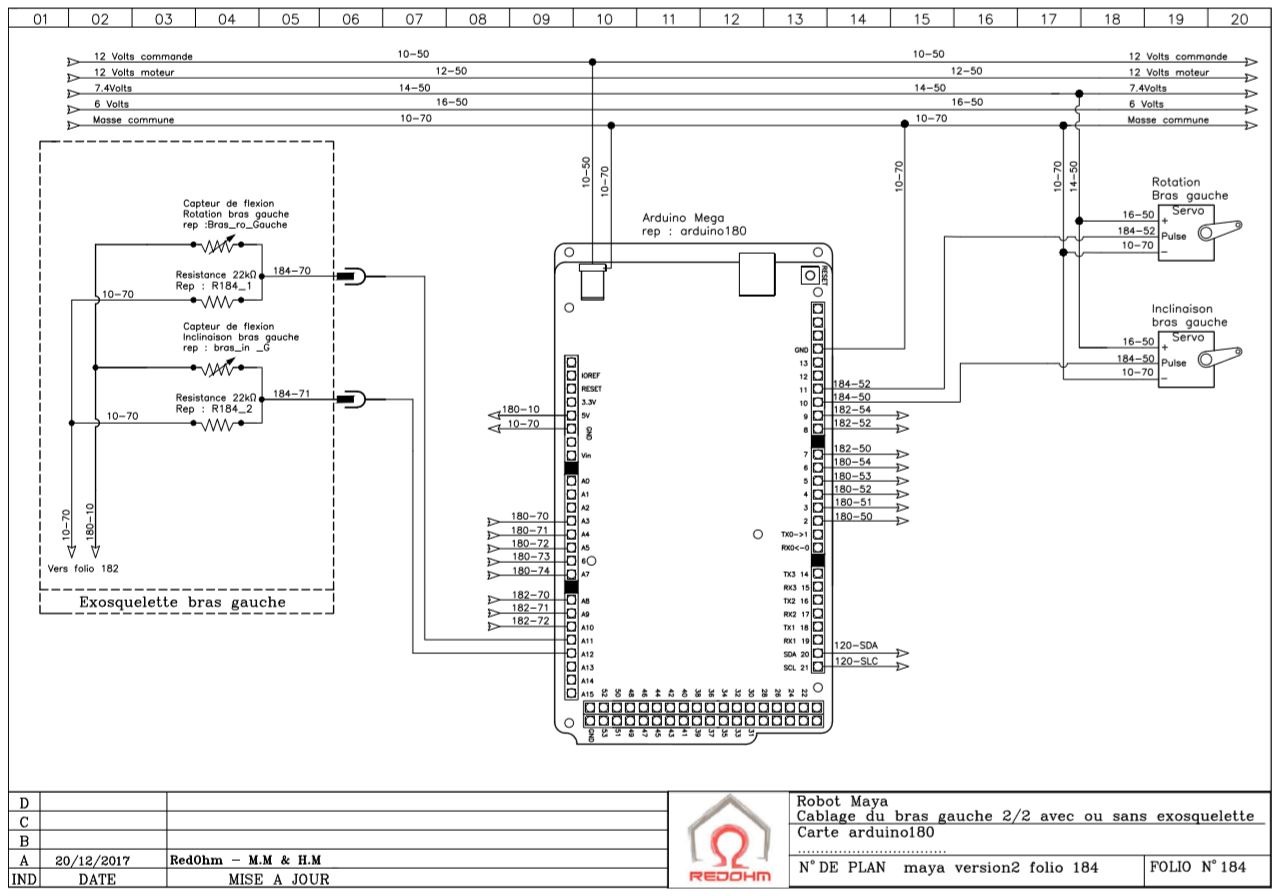
Folio 184 version 2 – Schéma du robot Maya ( cablage du bras gauche 2/2 avec ou sans exosquelette )
| Retour au sommaire |
![]()