
–
Mise à jour le 11/09/2021 : Dans cet article vous trouverez une partie du matériel DFRobot que RedOhm utilise pour ses applications , avec la documentation , les schémas , les programmes ;
Rappel : Documentations sur le matériel utile dans nos réalisations.
Sommaire :
Les modules de base .
- Le shield Nano IO DFR0012 est un module d’interface conçu pour le microcontrôleur Arduino Nano ou DFRduino Nano. Le module Nano s’enfiche directement sur le shield et ses entrées-sorties sont rendues accessibles ainsi que les borniers d’alimentation.
- Module DFRobot reference DFR0144 permettant de contrôler jusqu’à 4 relais isolés galvaniquement à partir d’une carte Arduino ou compatible. Le module est équipé d’un emplacement pour module Xbee ou compatible (bluetooth, wifi) permettant le contrôle sans fil
- Shield E/S Mega DFR0165 Carte d’expansion E/S de DFRobot permettant d’accéder à toutes les entrées/sorties d’une carte Arduino Mega ou compatible via des connecteurs 3 broches (Vcc, Gnd, Signal). La carte est équipée de 3 connecteurs pour module Xbee ou compatible et d’un port micro-SD. Sélection de la source d’alimentation.
Connecteurs sur la carte: toutes les sorties digitales et analogiques d’une carte Mega, port micro-SD, bornier d’alimentation et port I2C. - Shield d’expansion E/S V7 de DFRobot DFR0265 permettant d’accéder à toutes les entrées/sorties d’une carte compatible Arduino via des connecteurs 3 broches (Vcc, Gnd, Signal). Elle permet le raccordement de plusieurs capteurs/servomoteurs Gravity directement sur la carte. La carte est equipée d’un connecteur pour module Xbee ou compatible.
- Shield d’expansion pour Raspberry Pi3 DFR0327 carte d’expansion pour Raspberry B+, Pi2, Pi3 B ou Pi3 B+ basé sur un ATMega32U4 avec bootloader Leonardo intégré.
L’alliance des deux cartes permet une meilleure performance: une carte Arduino est plus rapide (en l’absence d’OS) pour une détection d’obtacle par exemple, alors que la carte Raspberry permet de faire tourner des algorithmes plus complexes et permet une meilleure flexibilité dans la communication sans fil.
Le module est également équipé d’un support pour module Xbee ou compatible . - Shield moteur 2 moteurs pas-à-pas DRI0023 basé sur deux drivers DRV8825 permettant de contrôler 2 moteurs pas-à-pas à partir de 4 sorties digitales à 1,6 A par phase.
Chaque moteur peut fonctionner en pas complet, demi pas, 1/4 de pas, 1/16 de pas et 1/32 de pas (réglage par dip switch). Ce module est également équipé d’un support pour module Xbee ou compatible.
![]()
Les modules d’entrées numérique ou TOR.
- Module joystick DFR0061
-
- Exemple de programme : Visualisation des axes x,y,z
-
![]()
Capteur de courant , principe des capteurs à effet hall .
- Capteur de courant Gravity 50A
![]()
Les modules de sorties .
- Les modules à Led rouge DFR0021R/ vert DFR0021V / bleue DFR0021B / DFR0021W
- Allumage du module à la mise sous tension de la carte Arduino
- Allumage du module a L’aide d’un bouton poussoir
- DFR0106 : Disque lumineux RGB
- DFR0202 : Module matrice RGB DFR0202 ( en cours )
![]()
Les modules de transformation pour l’environnement
- Principe de fonctionnement des capteurs de poussière
- Capteur de poussières Gravity SEN0177
![]()
Les modules audio
- Capteur sonore Gravity DFR0034
- Présentation du module.
- Schéma de la carte
- Exemple de programme
- Module analyseur audio Gravity DFR0126
- Module haut-parleur Gravity FIT0449 ( en cours )
![]()
Espace de stockage .
- Module carte micro-SD DFR0229
- Présentation de la carte
- Brochage et repérage du module DFR0229 pour le câblage sur un Arduino
- Exemple de câblage du module DFR0229
![]()
Capteur de mouvement .
- Capteur de mouvement 3D SEN0202 .Ce module DFRobot permet la détection de mouvements et la reconnaissance de gestes (gauche, droite, haut, bas, mouvement horaire et anti-horaire, etc). Il est basé sur le MGC3130 et utilise la technologie GestIC de Microchip.
Ce module communique avec une carte Arduino ou compatible via une interface I2C. Une librairie est disponible en fiche technique
![]()
Extensions d’entrées en I2C
- Shield interface I2C – GPIO Gravity V2.0 DFR0013 ( en cours )
- Module 4 canaux analogiques I2C DFR0316
- Contrôleur de Servomoteur Intelligent pour Arduino
![]()
Intelligence artificielle
- Module AI HuskyLens Gravity SEN0305S
- Arduino avec la Camera Sen0305 , la reconnaissance faciale
- Arduino et la camera Sen0305 le changement d’algorithmes
![]()
Module d’entrées sorties DFR0265 |
Sommaire :
- Présentation du module d’entrées sorties DFR0265
- Schéma de principe pour le câblage d’un capteur ou d’un bouton du type TOR .
- Schéma de principe pour le câblage d’un capteur analogique.
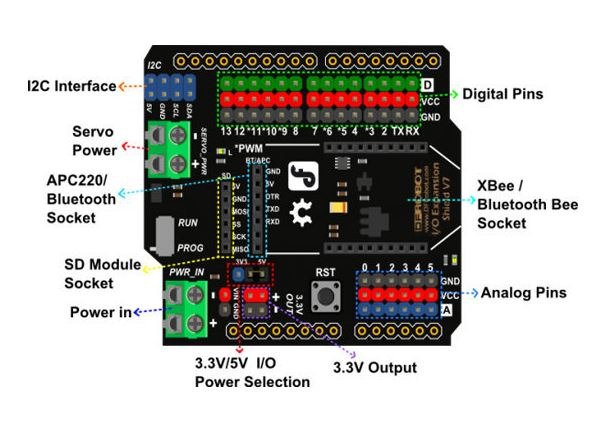
Présentation du module d’entrées sorties DFR0265 |
|
Shield d’expansion E/S V7 de DFRobot permettant d’accéder à toutes les entrées/sorties d’une carte compatible Arduino via des connecteurs 3 broches (Vcc, Gnd, Signal). Elle permet le raccordement de plusieurs capteurs/servomoteurs directement sur la carte. La carte est equipée d’un connecteur pour module Xbee ou compatible. Connecteurs sur la carte: toutes les sorties digitales et analogiques, connecteurs alimentation, liaison TTL/RS485, port I2C et connecteur pour module carte SD Module d’entrées sorties shield-es-v7-dfr0265 Alimentation: via carte Arduino ou bornier
|
| Retour au sommaire . |
Schéma de principe pour le câblage d’un capteur ou d’un bouton du type TOR (capteur qui donne une information dite « Tout Ou Rien « . ou un état logique 1 ou 0).
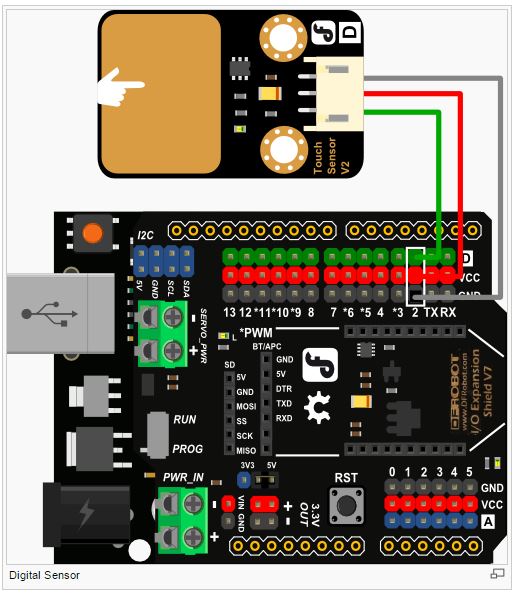
Exemple de câblage d’un capteur TOR (capteur qui donne une information dite « Tout Ou Rien « . ou un état logique 1 ou 0).
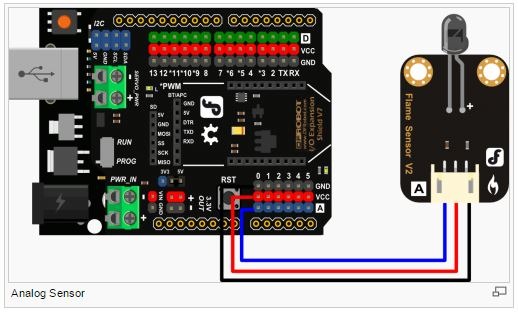
Schéma de principe pour le câblage d’un capteur analogique
Un capteur analogique transforme une grandeur physique en une grandeur normée, généralement électrique .Exemple de sortie électrique 0 à 10V , 4 mA à 20 mA , 0mA à 20mA
| Retour au sommaire . |
![]()
Module relais Shield DRF0144 |
Sommaire :
- Présentation du module
- Brochage du module DFR0144 .
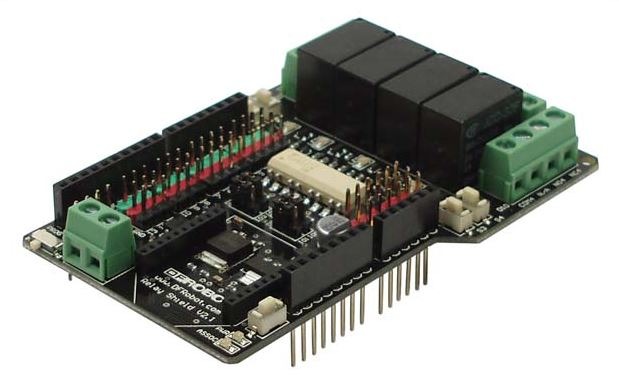
Présentation du DFR0144Module DFRobot permettant de contrôler jusqu’à 4 relais isolés galvaniquement à partir d’une carte Arduino ou compatible. Le module est équipé d’un emplacement pour module Xbee ou compatible (bluetooth, wifi) permettant le contrôle sans fil. Ce Shield utilise les sorties digitales D2, D3, D4 et D5 d’une carte compatible Arduino pour le pilotage des relais. L’alimentation de ce module doit se faire via le socle alimentation 7 à 12 Vcc de la carte Arduino. Chaque relais peut être contrôlé par un bouton de test et une led indique si le relais est en position de travail. |
 Module-relais-Shield-DRF0144 |
|
Alimentation à prévoir: 7 à 12 Vcc via Arduino
|
| Retour au sommaire . |
Brochage du module DFR0144
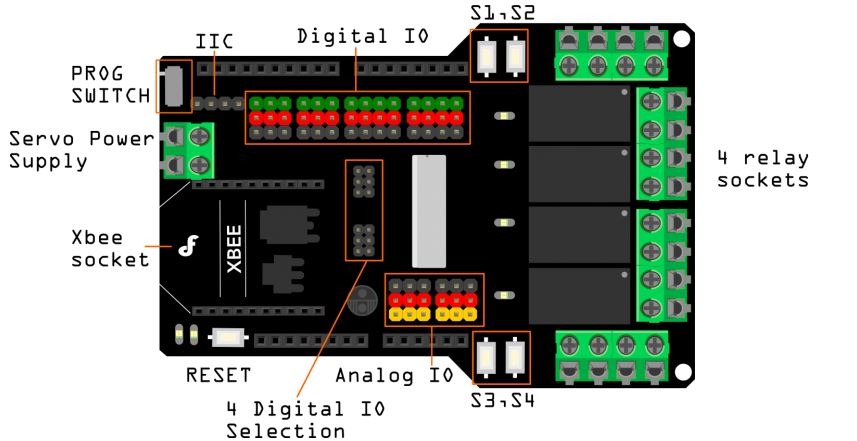
Brochage du module relais shield DFR0144
- Compatible avec : Arduino Rev3
- 4 boutons pour tester les relais du module
- LED indicateur d’état du relais
- Soutien Xbee IO contrôlent directement
- prise Xbee pour la communication sans fil
- broches IO numérique sélectionnable pour le contrôle des relais (par défaut sortie 2,7,8,10)
- 6 canaux IO analogiques et 13 canaux d’entrées-sorties numériques
- Jusqu’à 4 relais avec circuit de photo couplé
- Caracteristique des relais :
- Contact du relais : 3A AC 120V / DC 24V
- Tension de commutation max : AC 240V / DC 60V
- Courant de commutation : max 5A
- Durée de vie électrique (Min) : 100.000 opérations
- Durée de vie mécanique (Min) : 10.000.000 Opérations
- Tension de bobine de travail : 9VDC
- La puissance de commutation max est : DC 90W ou AC 360VA.
- Température de fonctionnement : -30 ℃ à 85 ℃
- Taille de la carte : 95x65mm
| Retour au sommaire . |
![]()
Les modules d’entrées |
Module joystick DFR0061 |
Module joystick Gravity DFRobot basé sur 2 potentiomètres (axes X et Y) et d’un bouton-poussoir pour des applications spécifiques. Il délivre deux sorties analogiques en fonction de la position des deux potentiomètres et une sortie logique en fonction du bouton-poussoir. Il se raccorde sur deux entrées analogiques et une entrée logique d’une carte compatible Arduino ou directement sur le shield

Module joystick Gravity DFR0061
Alimentation: 5 Vcc
Sorties: 2 analogiques et 1 digitale
Dimensions: 37 x 32 x 25 mm
Référence fabricant: DFR0061
Exemple de programme : Visualisation des axes x,y,z
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 |
/* * * * Redohm * le 05/11/2016 * * essai module DRF0061 * * Cablage du joystick reference DFR0061 * X-axe -> Broche analogique -> pin 0 * Y-axe -> Broche analogique -> pin 1 * z-axe -> Broche numerique -> pin 0 */ // broche sur laquelle est branché le potentiometre de l'axe x // broche analogique int JoyStick_X = 0; // broche sur laquelle est branché le potentiometre de l'axe y // broche analogique int JoyStick_Y = 1; // broche sur laquelle est branché le potentiometre de l'axe z // broche numerique int JoyStick_Z = 0; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { pinMode(JoyStick_Z, INPUT); // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur. Serial.begin(9600); // 9600 bps } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // Declaration des variables x,y,z // int -> declare une variable du type int (pour integer, entier en anglais) // elles peuvent stocker des valeurs de - 32 768 à 32 767 int x,y,z; // Lit la valeur de la tension présente sur la broche spécifiée // et la transfert dans la variable x x=analogRead(JoyStick_X); // Lit la valeur de la tension présente sur la broche spécifiée // et la transfert dans la variable y y=analogRead(JoyStick_Y); // broche numerique // Lit la valeur de la tension présente sur la broche spécifiée // et la transfert dans la variable y z=digitalRead(JoyStick_Z); // Affiche sur le terminal la valeur de x Serial.print (" Valeur de la axe x --> " ); Serial.println(x ,DEC); Serial.println (" ---------------------- " ); // Affiche sur le terminal la valeur de y Serial.print (" Valeur de la axe y --> " ); Serial.println(y ,DEC); Serial.print(","); // Affiche sur le terminal la valeur de z Serial.println(z ,DEC); // Réalise une pause dans l'exécution du programme pour la durée de // 300 millisecondes delay(300); } |
Documentation technique : DFRobot
Pour un accès direct à la page :
| Retour au sommaire . |
![]()
Principe des capteurs à effet Hall |
Le capteur de courant à effet Hall est un type de capteur de courant exploitant l’effet Hall pour produire une tension qui est l’image exacte (avec un facteur de proportionnalité connu) du courant à mesurer ou à visualiser
Capteur de courant Gravity 50A |
Principe des capteurs à effet Hall
Module Gravity capteur de courant 50 A CC ou AC basé sur le circuit ACS758. Le capteur retourne une valeur analogique précise avec une sensibilité de 40 mV/A. Faible perte (shunt interne de 100 µΩ).
Note : capteur à effet Hall linéaire à base ACS758
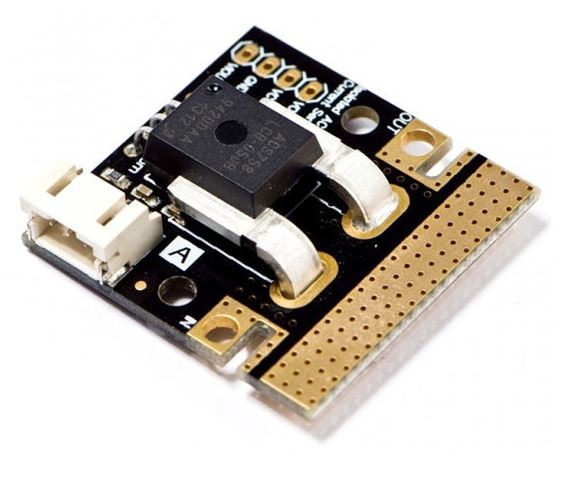
Capteur de courant Gravity 50A SEN0098
Alimentation: 3,3 à 5 Vcc
Plage de mesure: -50 à +50 A
Tension maxi de pointe: 3000 Vac ou 500 Vcc
Sensibilité: 40 mv/A
T° de service: -40 à +150 °C
Dimensions: 34 x 34 x 10 mm
Référence fabricant: SEN0098
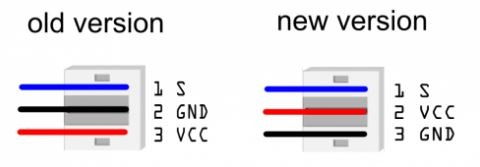
Brochage :
Documentation technique : DFRobot
Pour un accès direct à la page : DFRobot sen0098
Prix moyen entre :16 à 21€
| Retour au sommaire . |
![]()
Les modules de sorties |
Les modules à Led rouge DFR0021R/vert DFR0021V /bleue DFR0021B / blanc DFR0021W |
Module à led ( voir la référence ci-dessous pour la couleur ) en 5 mm Gravity DFRobot commandé à partir d’une sortie digitale d’une carte compatible Arduino.
Ce module se raccorde sur une sortie digitale d’une carte compatible Arduino ou directement sur le shield d’expansion E/S via le cordon inclus. La luminosité peut être modulée via PWM.

Les modules à Led rouge DFR0021R/vert DFR0021V /bleue DFR0021B / blanc DFR0021W
Caractéristiques:
Alimentation: 5 Vcc
Couleur: en fonction de la référence
Dimensions: 31 x 20 x 10 mm
Référence fabricant: DFR0021W (blanc)
Référence fabricant: DFR0021B (Bleu)
Référence fabricant: DFR0021V (Vert)
Référence fabricant: DFR0021R (Rouge)
***
| Retour au sommaire . |
Exemple de programme :
Allumage du module à la mise sous tension de la carte Arduino
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 |
/* * * Principe d'utilisation des modules * Allumage du module a la mise sous tension * de la carte Arduino * * Led rouge DFR0021R/ vert DFR0021V / bleue DFR0021B * DFR0021W * * * code proogramme SORTIE_001 * * RedOhm le 14/11/2016 */ // fixe le numero de broche pour la led // et déclare une variable de type octet byte led =12; /* * Fonction setup * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // la fonction pinMode configure la broche en sortie // pinMode ( nom de la patte ,sens de fonctionnement ) // le sens de fonctionnement ne possede que 2 valeurs // IMPUT ou OUTPUT pinMode(led, OUTPUT); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // la fonction digitalWrite commande la sortie à une action // dans le cas present de passer a l'etat haut // donc d'allumer la led digitalWrite(led, HIGH); } |
Programme ci-dessus à telecharger ⇒ sortie_001
| Retour au sommaire . |
***
Allumage du module a L’aide d’un bouton poussoir
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 |
/* * * Principe d'utilisation des modules * Allumage du module a L'aide d'un bouton poussoir * * * Led rouge DFR0021R/ vert DFR0021V / bleue DFR0021B * DFR0021W * * * code proogramme SORTIE_002 * * RedOhm le 14/11/2016 */ // fixe le numero de broche pour la led // et déclare une variable de type octet int led =12; // fixe le numero de broche pour la led // et déclare une variable de type int int bouton_poussoir =1; /* * Fonction setup * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // la fonction pinMode configure la broche en sortie // pinMode ( nom de la patte ,sens de fonctionnement ) // le sens de fonctionnement ne possede que 2 valeurs // IMPUT ou OUTPUT // Declaration de la led en sortie // Declaration du bouton poussoir en entrée pinMode(led, OUTPUT); pinMode(bouton_poussoir,INPUT); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // Lit la valeur du bouton poussoir et verifie si le bp = 1 if (digitalRead(bouton_poussoir)==HIGH ) { // la fonction digitalWrite commande la sortie à une action // dans le cas present de passer a l'etat haut // donc d'allumer la led digitalWrite(led, HIGH); } else { // la fonction digitalWrite commande la sortie à une action // dans le cas present de passer a l'etat Bas // donc d'éteindre la led digitalWrite(led, LOW); } } |
Programme ci-dessus à telecharger ⇒ sortie_002
Documentation technique : DFRobot
Prix moyen entre : 3 à 4€
| Retour au sommaire . |
***
Module matrice RGB DFR0202 |
Présentation du module :
Module matrice 8 x 8 RGB livré avec son contrôleur permettant le contrôle via l’interface SPI (3 broches) à partir d’un microcontrôleur (Arduino par exemple).
Le module possède des connecteurs latéraux permettant d’enficher plusieurs modules verticalement ou horizontalement. Il ne se connecte pas directement sur les connecteurs d’une carte Arduino.
| Retour au sommaire . |
![]()
Les modules de transformation pour l’environnement*** Lumière,température, humidité,poussière ,Bruit, gaz,pression atmosphérique |
Principe de fonctionnement des capteurs de poussière |
Les capteurs de poussière utilise en général la théorie diffraction laser
Le principe est le suivant : quand un faisceau laser traverse de l’air pur, le faisceau est invisible. Lorsque le faisceau est visible, c’est parce que le faisceau se diffracte sur des particules tout au long de son chemin. Si on regarde le faisceau de côté, plus le faisceau est visible, plus la densité de particules est- importante.
Un tel capteur de particules utilise une source proche de l’infrarouge (diode laser). Le capteur est une photodiode avec amplificateur. L’infrarouge est utilisé pour éviter toute interférence avec la lumière du jour entrant dans la chambre de mesure.
La densité de poussière dépend principalement de l’écoulement de l’air.
| Retour au sommaire . |
![]()
Capteur de poussières Gravity SEN0177 |
Ce module Gravity permet de mesurer la quantité de particules présentes dans l’air sur 3 calibres (0,3 à 1 µm – 1 à 2,5 µm – 2,5 à 10 µm). Il communique avec un microcontrôleur type Arduino ou compatible via une liaison série.
 Caractéristiques:
Caractéristiques:
Alimentation: 4,95 à 5,05 Vcc
Consommation: 120 mA
Consommation au repos: ≤200 uA
Particule mini détectable: 0,3 µm
Calibres: 0,3 à 1 µm – 1 à 2,5 µm – 2,5 à 10 µm
Plage mesure: 0 à 500 µg/m3
Temps de réponse: ≤10 s
Température de service: -20 à 50°C
Humidité de service: 0 à 99 %RH
Dimensions: 65 x 42 x 23
Référence DFRobot: SEN0177
Exemple :
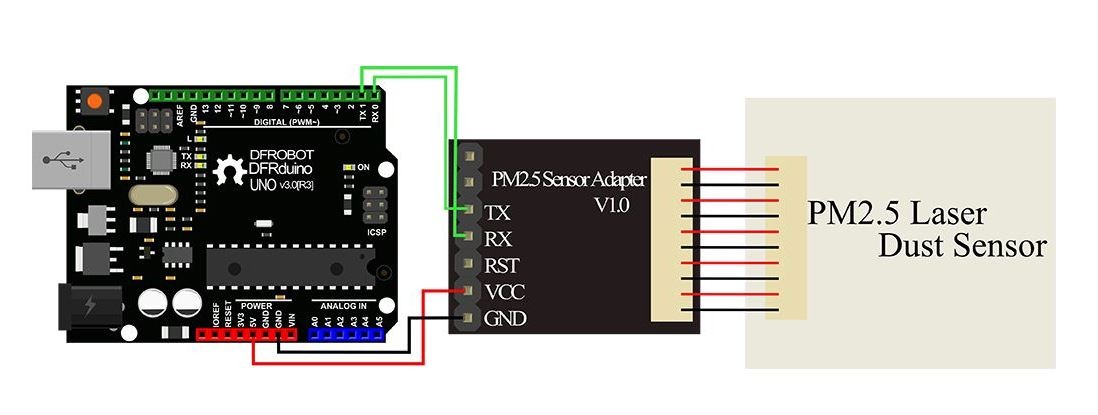
Protocole de communication du module :
Vitesse du port: 9600; Parité: aucune; Bits d’arrêt: 1; la longueur des paquets est fixé à 32 octets.
| Caractère de début 1 | 0x42 (bit fixe) |
| Caractère de début 2 | 0x4D (bit fixe) |
| Longueur de trame de 16 octets | Longueur de trame (bit de contrôle des données +) = 2 * 9 + 2 |
| Données 1, 16 octets | concentration de PM1.0, ug / m3 |
| Données 2, 16 octets | concentration de PM2.5, ug / m3 |
| Les données 3, 16 octets | concentration de PM10.0, ug / m3 |
| Les données 4, 16 octets | données de test interne |
| Les données 5, 16 octets | données de test interne |
| Les données 6, 16 octets | données de test interne |
| Les données 7, 16 octets | le nombre de particules de diamètre supérieur à 0.3um dans 0,1 litres d’air |
| Les données 8, 16 octets | le nombre de particules de diamètre supérieur à 0.5um dans 0,1 litres d’air |
| Les données 9, 16 octets | le nombre de particules de diamètre supérieur à 1.0um dans 0,1 litres d’air |
| Données 10, 16 octets, | le nombre de particules de diamètre supérieur à 2,5 uM dans 0,1 litres d’air |
| Les données 11, 16 octets | le nombre de particules de diamètre supérieur à 5.0um dans 0,1 litres d’air |
| Données 12, 16 octets, | le nombre de particules de diamètre supérieur à 10.0um dans 0,1 litres d’air |
| Les données 13, 16 octets | données de test interne |
| Vérification Bit pour les données Somme, 16 octets | Vérification Bit = Début Caractère 1 + Début Caractère 2 + … toutes les données |
Documentation technique : DFRobot
Prix moyen entre : 59 à 62€
| Retour au sommaire . |
![]()
Module capteur sonore Gravity DFR0034 |
Présentation du module DFR0034 :
Capteur sonore Gravity DFRobot constitué d’un micro à électret et d’un amplificateur. Il délivre un signal analogique en fonction de l’intensité sonore reçue. La sensibilité est réglable via un potentiomètre ajustable.
Ce module se raccorde sur une entrée analogique d’une carte compatible Arduino ou directement sur le shield d’expansion E/S .
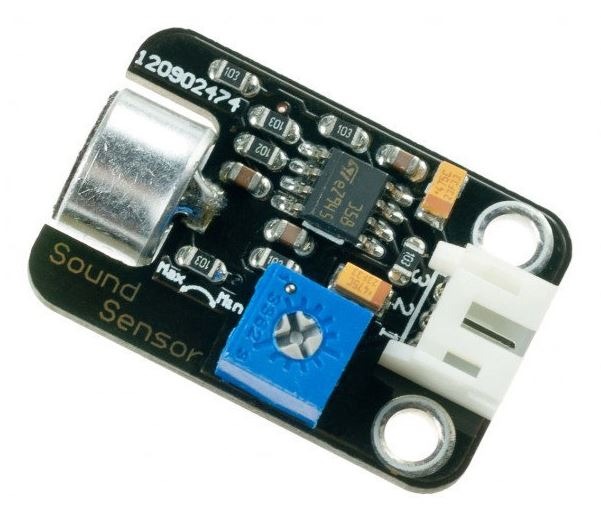
capteur sonore gravity dfr0034
Caractéristiques:
Alimentation: 5 Vcc
Dimensions: 31 x 21 x 10 mm
Référence fabricant: DFR0034
Schéma de la carte :
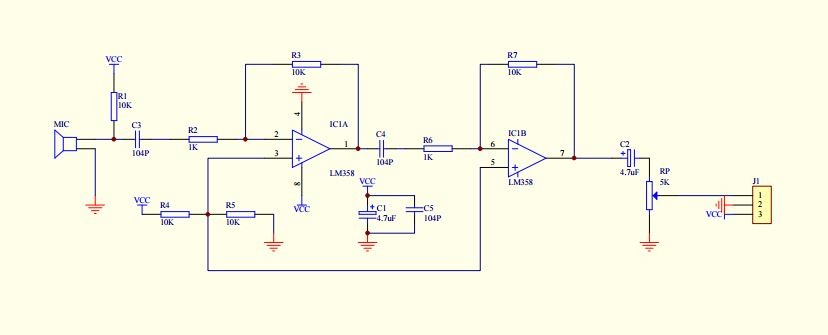
Schéma de la carte gravity dfr0034
Exemple de programme :
1- Affichage sur le terminal de l’intensité du son sur la borne .
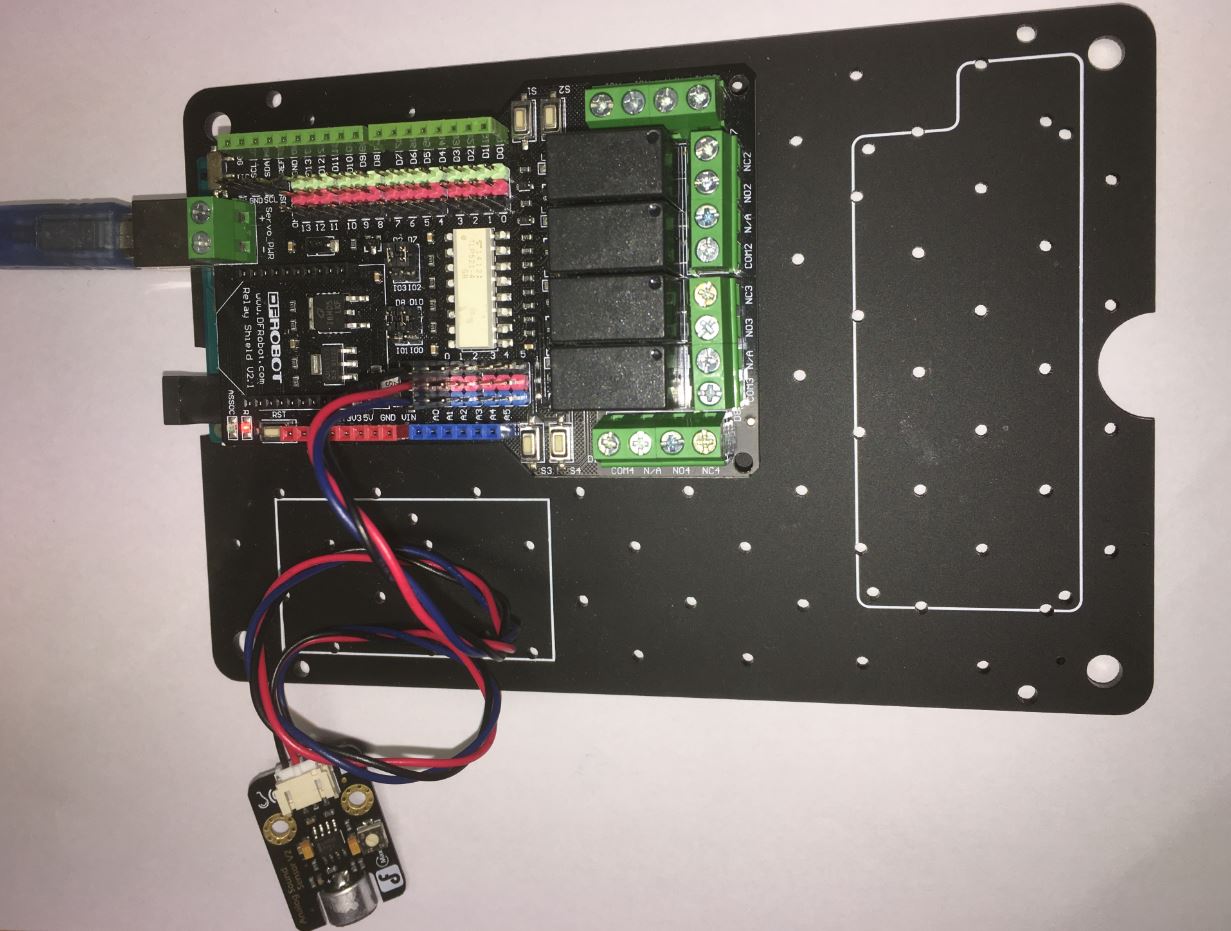
Capteur sonore gravity dfr0034 sur la carte e/s
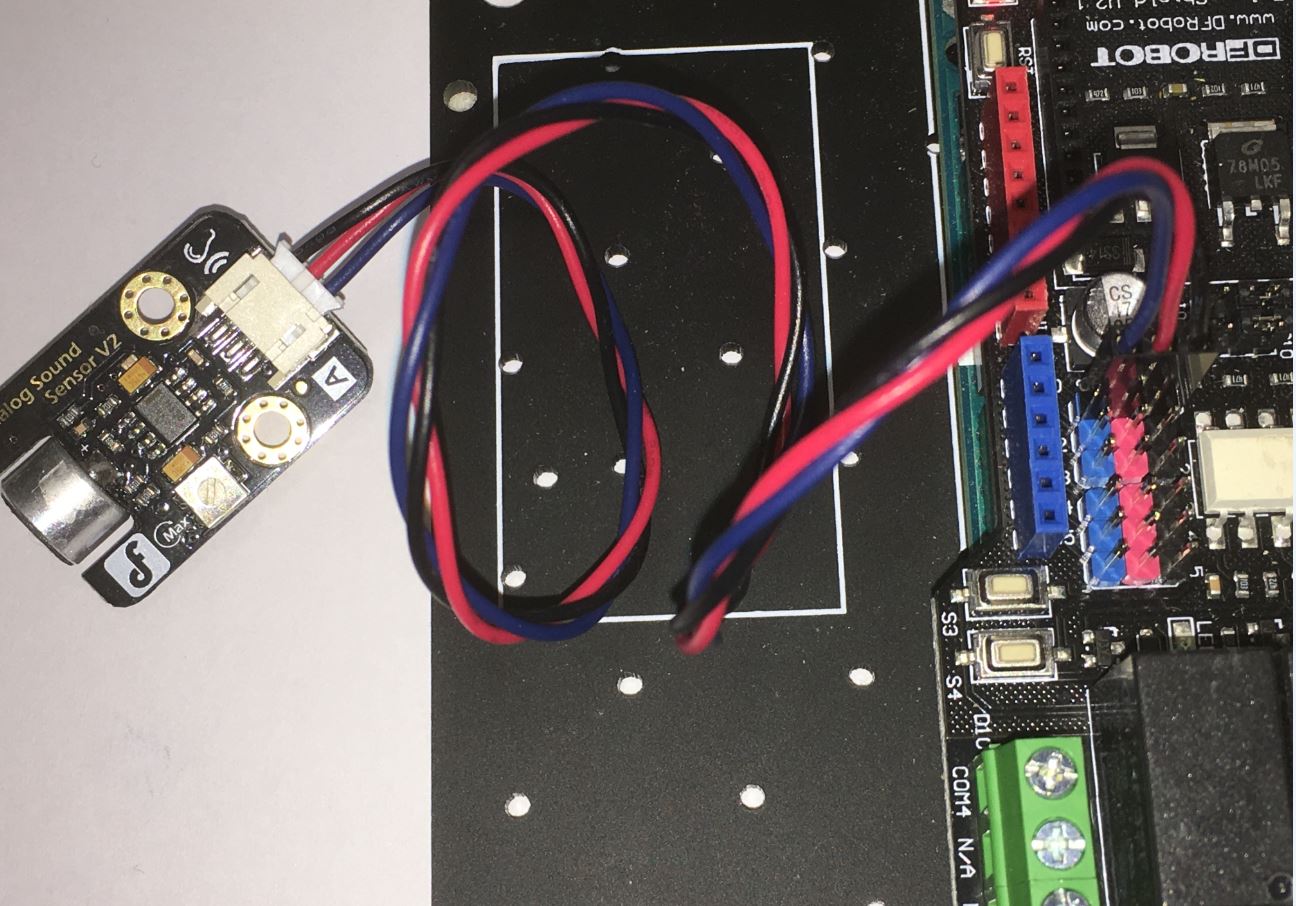
Capteur sonore gravity dfr0034 sur la carte e/s
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 |
/* * * * RedOhm * * * Affichage sur le terminal de l'intensite du son sur la borne * * * Le 08/11/2016 * Nom: SON-001 * H.Mazelin */ // broche sur lequel est branche le // module capteur sonore Gravity DFR0034 int broche_capteur_sonore=0; // variable contenant la valeur du module sonore int valeur_capteur_sonore; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur. Serial.begin(9600); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // lecture de la valeur du capteur sonore (valeur entre 0 et 1023) valeur_capteur_sonore=analogRead( valeur_capteur_sonore); // Affichage du texte ci-dessous Serial.print("Affichage de la valeur du capteur sonore comprise entre 0 et 1023 ---> "); // Affichage de la valeur du capteur sonore comprise entre 0 et 1023 Serial.println(valeur_capteur_sonore); } |
Programme ci-dessus à telecharger ⇒ son-001
Suite à nos essais : Nous pouvons dire que ce capteur n’est utilisable que pour des intensités relativement importante ( du moins sur le module entre notre possession ) .
Documentation technique : DFRobot
Pour un accès direct à la page :
Prix moyen entre :8.5 à 10€
| Retour au sommaire . |
![]()
Module analyseur audio Gravity DFR0126 |
Module analyseur audio Gravity DFR0126 basé sur un MSGEQ7 et permettant de mesurer 7 fréquences: 63 Hz, 160 Hz, 400 Hz, 1 kHz, 2,5 kHz, 6,25 kHz et 16 kHz. Il se raccorde sur deux sorties digitales et une sortie analogique d’une carte compatible Arduino.
A savoir: l’utilisation du module nécessite le capteur sonore DFR0034 ou se raccorde sur une sortie d’un amplificateur (voir fiche technique).
Ce module se raccorde sur 2 entrées digitales et une entrée analogique d’une carte compatible Arduino ou directement sur le shield d’expansion E/S .

Module analyseur audio Gravity DFR0126
Caractéristiques:
Alimentation: 5 Vcc
Fréquences mesurées: 63 Hz, 160 Hz, 400 Hz, 1 kHz, 2,5 kHz, 6,25 kHz et 16 kHz.
Dimensions: 30 x 20 x 9 mm
Référence fabricant: DFR0126
Documentation technique : DFRobot
Pour un accès direct à la page :
Prix moyen entre :22 à 24€
| Retour au sommaire . |
![]()
Module carte micro-SD DFR0229 |
Ce module pour carte micro-SD permet d’ajouter un espace de stockage sur vos projets à microcontrôleur .
Le module se raccorde sur les entrées digitales 4 ,11, 12 et 13 d’une carte compatible Arduino. Il peut s’utiliser avec une plaque d’essais sans soudures.
 Alimentation: 5 Vcc
Alimentation: 5 Vcc
Interface : SPI
Carte micro-SD non incluse
Dimensions: 28 x 20 x 12 mm
Référence fabricant: DFR0229
Brochage et repérage du module DFR0229 pour le câblage sur un Arduino

Repérage pour module-carte-micro-sd-dfr0229
Exemple de câblage du module DFR0229
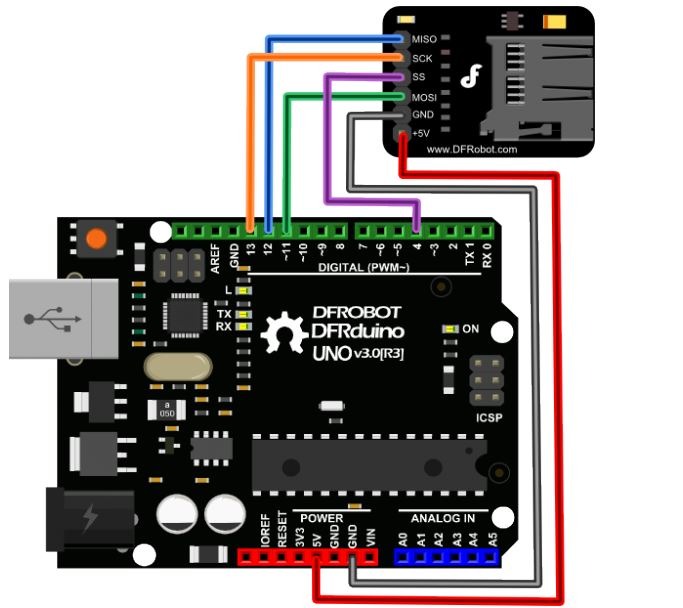
Exemple de câblage avec une carte Uno ou DFRduino Uno module carte micro sd dfr0229
Documentation technique : DFRobot
Pour un accès direct à la page :
Prix moyen entre : 5 à 6.5€
| Retour au sommaire . |
![]()
Module 4 canaux analogiques I2C DFR0316 |
Ce module amplificateur différentiel 4 canaux à faible bruit est basé sur un MCP3432 18 bits à gain réglable et communique avec un microcontrôleur via le bus I2C. Il permet d’ajouter 4 entrées analogiques sur une carte Raspberry ou plus de précision sur les entrées analogiques d’une carte Arduino.
Des librairies Arduino et Raspberry sont disponibles pour l’utilisation de ce module.Ou en cas de difficulté vous pouvez les télécharger ci-dessous mais attention elles ne sont pas forcément de la dernière version .
Mise à jour des librairies le 07/11/2016
Pour Arduino : dfr0316_arduino-library-2
Pour Raspberry : dfr0316_linux_iio_mcp3422
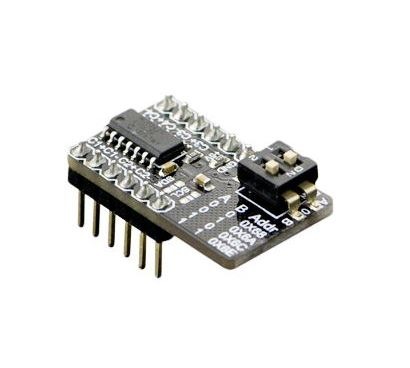
Module 4 canaux analogiques I2C DFR0316
Caractéristiques:
Alimentation: 2,7 à 5,5 Vcc
Consommation en standby: 300 nA sous 5 Vcc
Gain programmable PGA: x1, x2, x4 ou x8
Plage de mesure différentielle: de -2,048/Gain à +2,048/Gain (par exemple de -0,512 à +0,512 V pour un gain de 4)
Résolution programmable: 12, 14, 16 ou 18 bits
Vitesse: 240, 60, 15 ou 3,75 mesure/seconde
Erreur gain: 0,05 % (gain = 1 sous 18 bits)
Erreur offset: 15 µV (gain = 1 sous 18 bits)
Interface I2C: 0X68, 0X6A, 0X6C ou 0X6E (sélectionnable par dip-switch)
Référence de tension interne: 2,048 Vcc ± 0,05%
T° de service: -40 à +125 °C
Dimensions: 27 x 16 x 12 mm
Référence fabricant: DFR0316
Brochage et repérage du module DFR0316
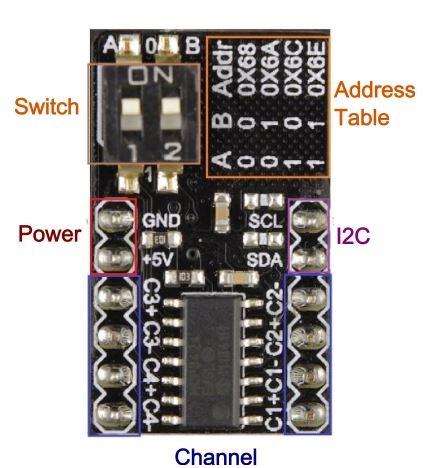
Module 4 canaux analogiques I2C DFR0316 ( brochage et repérage )
Exemple de câblage du module DFR0316
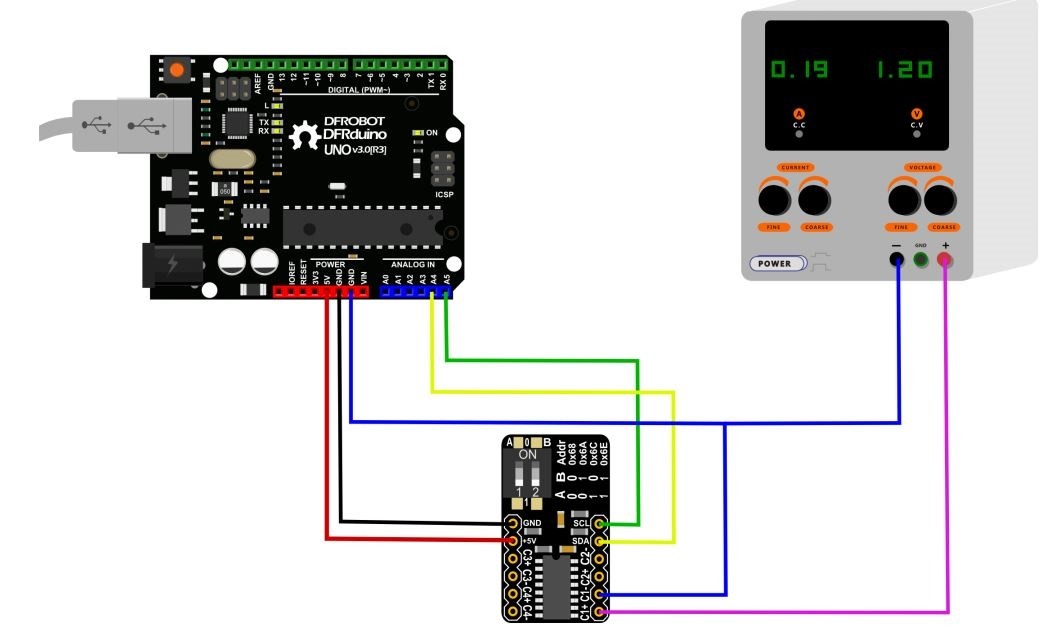
Exemple de câblage du module-4-canaux-analogiques-i2c-dfr0316
Documentation technique :
DFRobot
Pour un accès direct à la page :
Prix moyen entre :15 à 19€
| Retour au sommaire . |
![]()
![]()