
***
Mise à jour le 26/07/2015
Nous avons voulu reproduire le bras du plus mythique des robots le T800 pour plusieurs raisons,nous avons vu que la main correspondait à nos besoins et surtout correspond a un bon sujet d’étude sur le principe de fonctionnement d’un avant-bras comme de la main d’ailleurs .
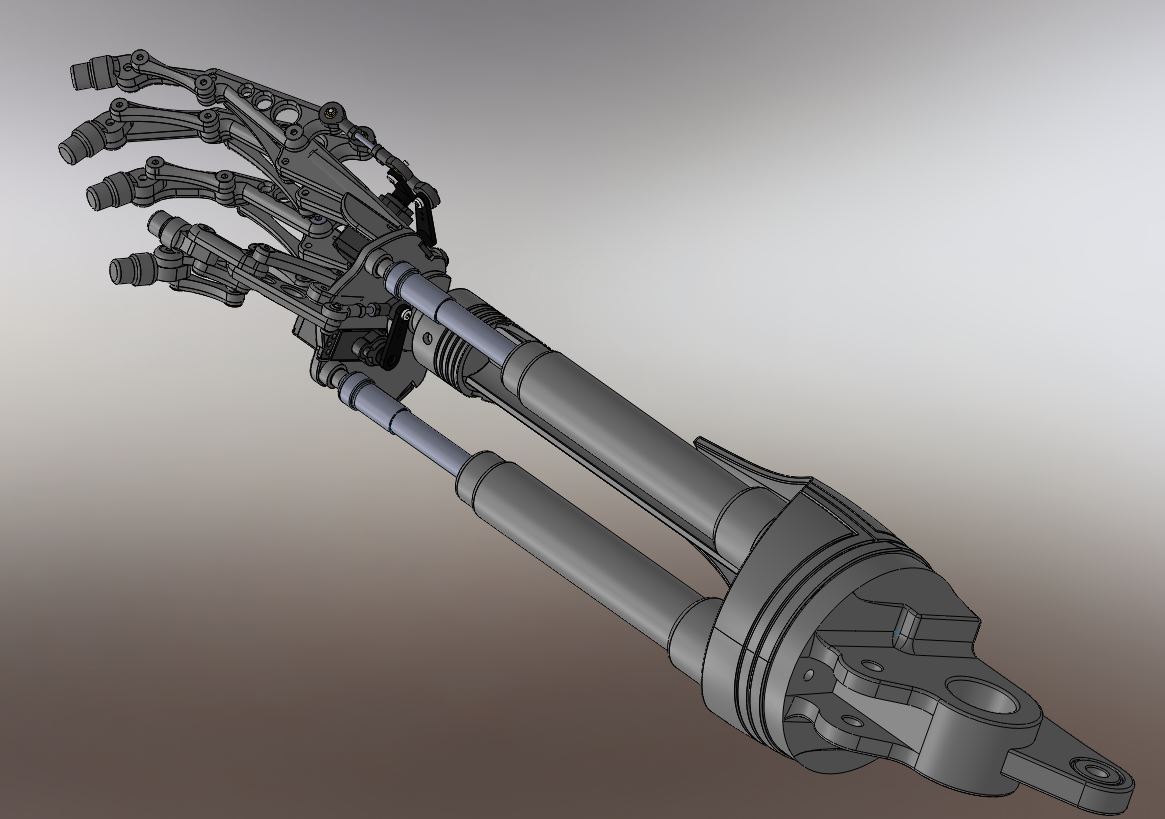
Ensemble avant bras et main modification du bras par RedOhm
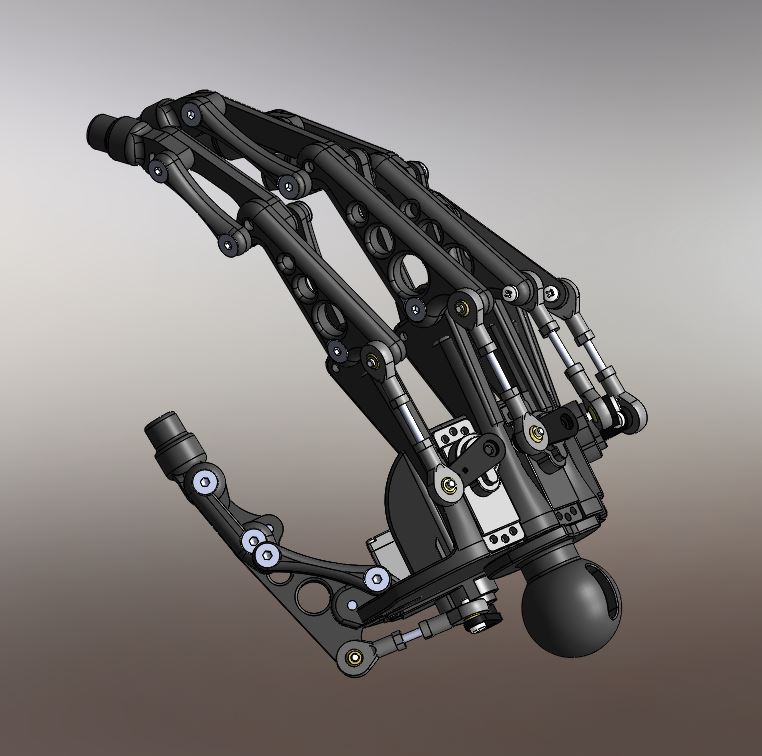
La main avec une vue sur les servomoteurs modification de RedOhm
Comme toutes nos réalisations, vous allez avoir un album photos correspondant à l’étude , l’impression, la réalisation ainsi que l’assemblage de l’ensemble. Vous aurez des exemples de programmation sur la carte Arduino.
Nous avons aussi travaillé sur le coût de la construction de ce bras. Il faut compter pour la matière première Abs ou du PLA à peu près 500 g (Soit l’équivalent de 18 €). Nous avons remplacé les 5 petits vérins des doigts par 5 servomoteurs à 6,90€ pièce, et nous avons utilisé 2 vérins électriques pour le mouvement des bras sur la version V 1.00 à 95€ pièce . Il est vrai que c’est la seule partie onéreuse de la construction de ce bras.
Rappel :
Nous rappelons que la construction de l’avant bras est une reprise de fichiers STL qui était disponible sur le Internet ,mais nous avons dû modifier une grande partie de la main pour pouvoir loger les servomoteurs ,modifier les supports du socle de la main , intégrer les deux vérins électriques dans des caches et de nombreuses améliorations pour pouvoir faire fonctionner la maquette.

Servomoteur ES08MA pour les doigts
Servomoteur miniature avec pignonnerie métallique.
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm

Actionneur linéaire L12-100-6R pour le mouvement du poignet
Caractéristiques:
- alimentation: 6 Vcc
- contrôle: signal RC servo
- course maxi: 100 mm
- vitesse à vide: 12 mm/s
- précision: 0,3 mm
- réduction: 100:1
- force: 23 N à 6 mm/s
- force de maintien: 80 N
- cycle de charge: 20%
- courant de blocage: 450 mA
- niveau sonore: 55 dB à 45 cm
- indice de protection: IP54
- t° de travail: -10°C à +50°C
- section: 15 x 18 mm
- longueur: 160 mm au repos
- connectique: fiche JR
- poids: 56 g
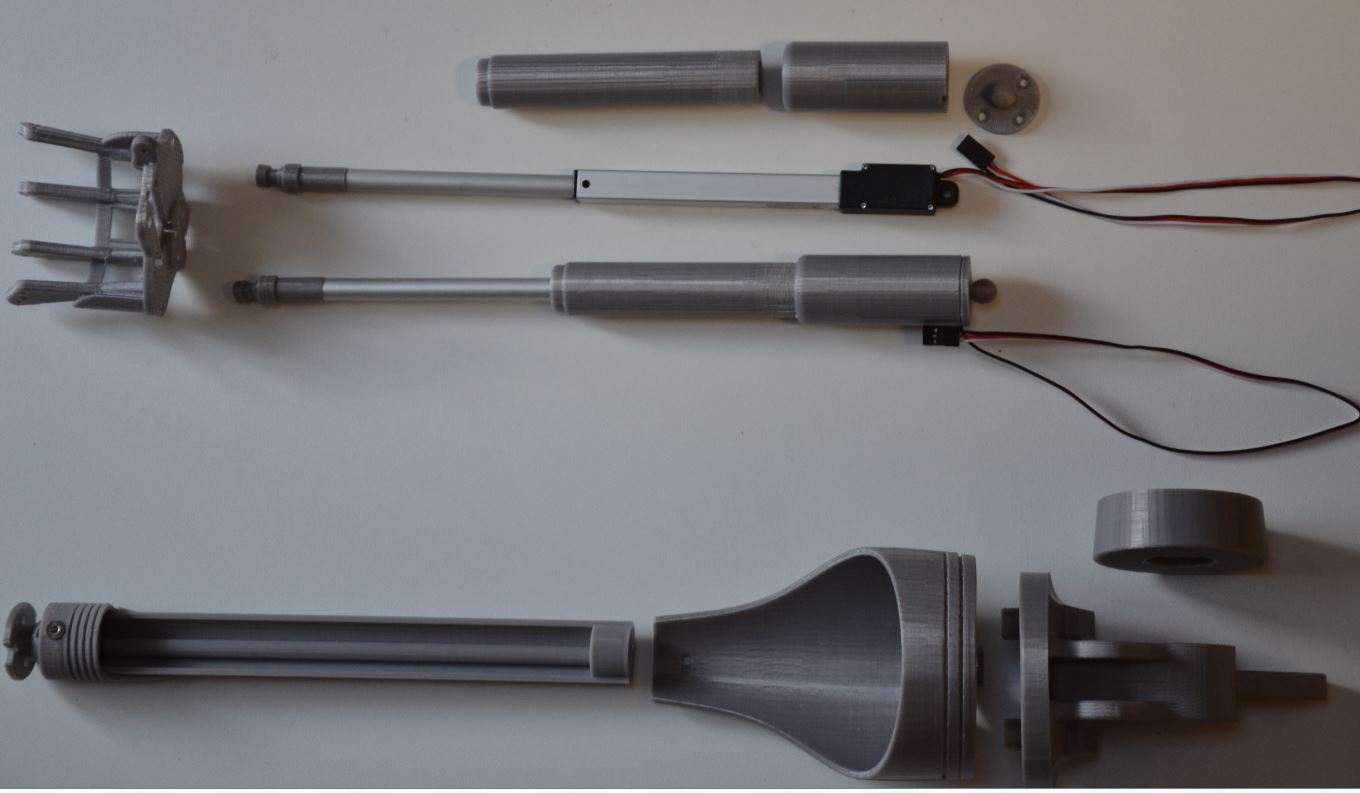
Vue des verins avec leurs coques
***
![]()