
–
Mise à jour le 20/10/2017 . Dans cet article vous trouverez les caractéristiques principales de la carte Arduino Mega 2560 , ainsi que les cartes additives de différents constructeurs pour son utilisation .
Sommaire :
- Présentation de la carte Arduino Mega 2560
- Une 3e révision pour la carte Mega 2560
- Schéma électronique de la carte Arduino Mega 2560
- Spécifications techniques de la carte Arduino Mega 2560 Rev3
- Alimentation de la carte Arduino.
- Entrées et sorties numériques et analogique
- Présentation
- Entrées série asynchrones
- Interruption externe
- Combien y-t-il d’interruption externe ?
- Comment utiliser correctement les interruptions ?
- Les sorties PWM
- Bus série normalisé SPI
- Entrée – sortie pour interface série I2C
- Entrées analogiques
- Pinmode Arduino 2560
- Brochage de la carte Arduino 2560
- Exemple de raccordement sur les différentes entrées
- Exemple de programme pour la déclaration d’entrée sortie numérique ( tuto vidéo ).
- Les cartes d’interfaces pour Arduino Mega
- Présentation d’une carte d’interface
- Carte d’interface DFR0144 de chez DFRobot
- Carte d’interface Grove Mega Shield V1.2 103020027
- shield E/S pour Arduino Mega Sensor Shield TinkerKit
- Retour au menu principal .
![]()
Présentation de la carte Arduino Mega 2560 |
La carte Arduino Mega 2560 a été conçue comme la remplaçante de la carte Arduino Mega. Elle est dotée d’un microcontrôleur ATMega2560 disposant d’une mémoire flash de 256 KB, dont 8 KB dévolus au Bootloader ( Bootloader ? => il permet de télécharger vos programmes entre l’IDE Arduino (interface de développement) et votre Arduino; également la possibilité de pouvoir exécuter votre programme lors du démarrage de l’Arduino. ).
A savoir : L’ensemble de la gamme Arduino et programmables via un langage proche du « C » (disponible en libre téléchargement), les modules Arduino peuvent fonctionner de façon autonome ou en communicant avec un logiciel fonctionnant sur un ordinateur.
| Retour au sommaire . |
![]()
Une 3e révision pour la carte Mega 2560. |
Avec la carte Arduino Mega 2560, vous disposez de : 54 entrées/sorties numériques, dont 14 pins digitaux pour vos sorties PWM, 16 pins d’entrée analogique, 4 UARTS, un bouton reset et un connecteur ICSP. La carte de développement Arduino Mega 2560 a également été équipée d’un oscillateur à quartz de 16 MHz.
Connectique type Headers (connecteurs femelles).
Port USB (type B). Embase alimentation.
Alimentation 7 à 12 V.
Dimensions : 53 x 101 mm.
La carte Arduino Mega 2560 dans sa 3e version, qui inclut de nouvelles fonctionnalités et améliorations matérielles :
- Le convertisseur USB-Série ATMega8U2 a été remplacé par l’ATMega16U2.
- Le circuit Reset a été renforcé.
- Vous trouverez à côté du pin AREF des pins SDA et SCL pour assurer la communication I2C.
- 2 nouveaux pins sont situés à côté du bouton reset : un pin IOREF pour l’adaptation de vos shields à la tension fournie par la carte, et un pin non connecté à réserver pour de nouvelles utilisations.
| Retour au sommaire . |
![]()
Schéma électronique de la carte Arduino Mega 2560 |
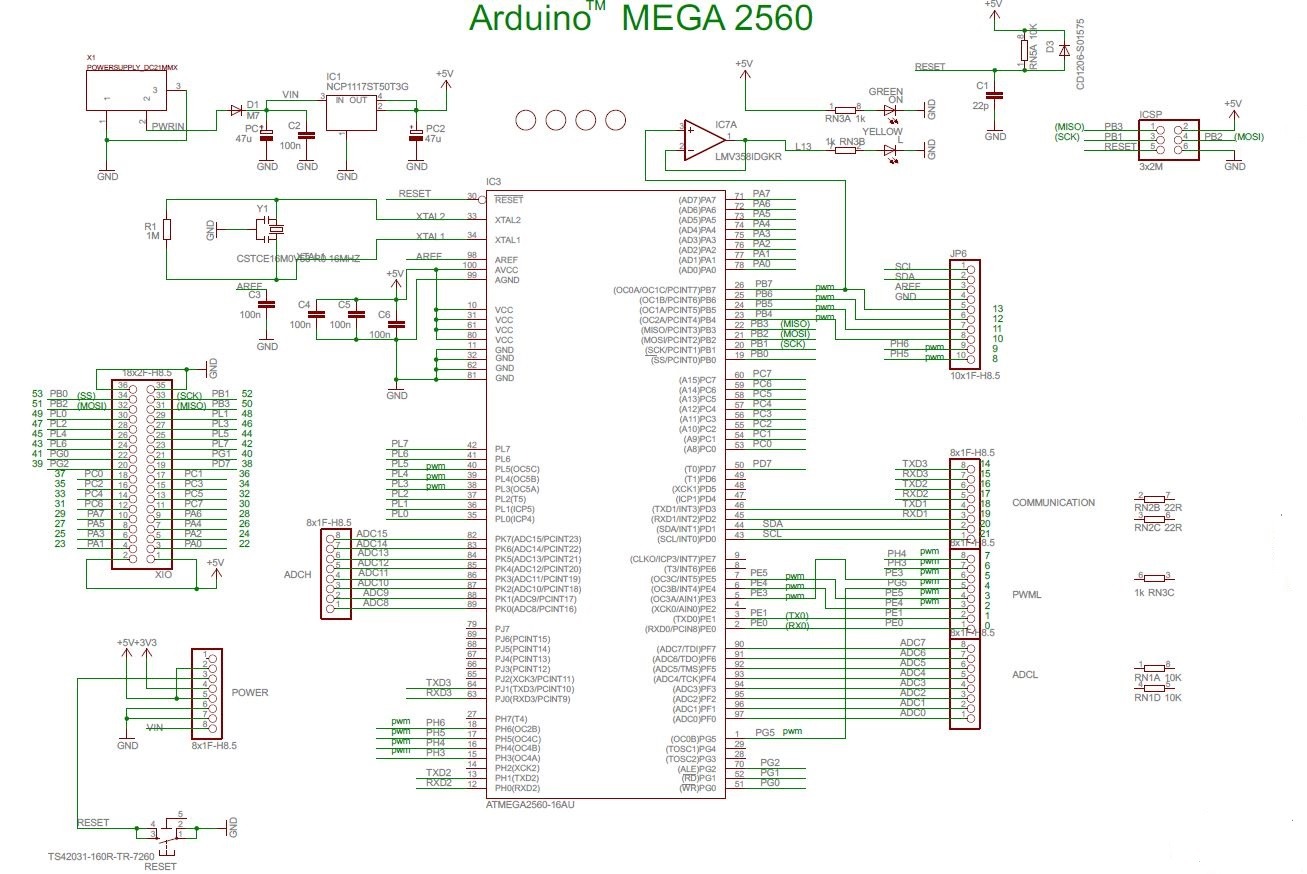
Schéma 1/3 .Cliquez pour agrandir

Schéma 2/3 .Cliquez pour agrandir
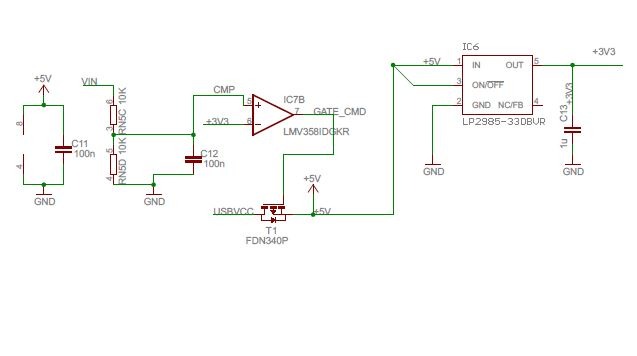
Schéma 3/3 .Cliquez pour agrandir
| Retour au sommaire . |
Spécifications techniques de la carte Arduino Mega 2560 Rev3 |
- Microcontrôleur : ATmega2560
- Tension de fonctionnement : 5 V
- Gamme de tension d’entrée (recommandée) : 7-12 V
- Gamme de tensions d’entrée (limite) : 6-20 V
- Pins digitaux I/O : 54
- Pins digitaux I/O PWM : 14
- Pins d’entrée analogique : 16
- Courant direct par pin I/O : 40 mA
- Courant direct pour les pins 3,3 V : 50 mA
- Mémoire flash : 256 KB
- Mémoire Flash du Bootloader : 8 KB
- SRAM : 8 KB
- EEPROM : 4 KB
- Fréquence d’horloge de l’oscillateur à quartz : 16 MHz
- Dimensions : 101,52 x 53,3 mm
- Poids : 37 g
–
| Retour au sommaire . |
Alimentation de la carte Arduino. |
La carte Arduino Mega peut être alimentée via la connexion USB ou avec une alimentation externe. La source d’alimentation est sélectionnée automatiquement.
L’alimentation externe (non USB) peut provenir d’une alimentation sortie courant continu ou d’une batterie. L’adaptateur peut être connecté en branchant une fiche positive de 2,1 mm au centre dans la prise d’alimentation de la carte. Les fils provenant d’une batterie peuvent être insérés dans les connecteurs des broches Gnd et Vin du connecteur POWER.
A savoir :
La carte peut fonctionner sur une alimentation externe de 6 à 20 volts .
En cas d’utilisation de plus de 12V, le régulateur de tension peut surchauffer et endommager la carte. La plage recommandée est de 7 à 12 volts.
Si la carte est alimentée avec moins de 7V, la broche 5V peut fournir moins de 5V et la carte peut être instable.
Les broches d’alimentation pour la carte Arduino Mega sont les suivantes:
- VIN. La tension d’entrée de la carte Arduino lorsqu’elle utilise une source d’alimentation externe (par opposition à 5 volts provenant de la connexion USB ou d’une autre source d’alimentation régulée). Vous pouvez fournir la tension à travers cette broche (attention public averti)
- 5V. C’est l’ alimentation régulée utilisée pour alimenter le microcontrôleur et les autres composants de la carte. Cela peut provenir de VIN via un régulateur embarqué, ou être fourni par l’USB ou toute autre alimentation 5V régulée.
- V3. Une alimentation de 3,3 volts générée par la puce FTDI embarquée. La consommation de courant maximale est de 50 mA.
- GND. Masse de la carte ou 0v de référence
| Retour au sommaire . |
Entrées et sorties numériques |
Présentation :
54 entrées / sorties numériques , repérées de 0 a 53; chacune d’entre elles pouvant fonctionner en entrée ou en sortie sous le contrôle du programme et ce sens pouvant même changer de manière dynamique pendant le fonctionnement du programme .Ces entrées / sorties admettent et délivrent des signaux logiques compatible TTL ( tension comprise entre 0 et 5V ).Elles peuvent fournir ou délivrer un courant maximum de 40 mA ,mais attention l’ensemble des sorties ne saurait en aucun cas dépasser 200 mA .
Comment déclarer des entrées sorties
Ce premier programme vous initie à l’utilisation des entrées tout ou rien sur la carte Arduino . Comment déclarer un bouton poussoir , un relais et comment les utiliser.
Voici un tutoriel vidéo expliquant le principe de la déclaration des entrées sortie
–
| Retour au sommaire . |
Entrées série asynchrones |
– 4 entrées ( Rx0,Rx1,Rx2,Rx3) et 4 sorties (Tx0,Tx1,Tx2,Tx3) séries asynchrones , partagées respectivement avec les lignes 0,19,17,15 pour la partie Rxn 1,18,16,14 pour ce qui est des Txn.
Exemple de programme sur la communication série
- Lecture de 3 valeurs sur la carte Arduino via le port série et animation d’un rectangle sur l’écran
| Retour au sommaire . |
Interruption externe
Combien y-t-il d’interruption externe ?
– 6 entrées d’interruption externes partagées avec les lignes 2,3,18,19,20,21 .
Comment utiliser correctement les interruptions ?
- les données sur les ports de communication ne sont pas pris en compte lors de l’exécution des interruptions.
- Les variables utilisées dans les interruptions doivent être déclarées comme volatile .
- Au sein des routines d’interruption la fonction delay ne fonctionne pas
- Au sein de ces mêmes routines d’interruption la fonction millis() n’a aucun effet
Les sorties PWM
– 14 sorties PWM ( La modulation de la largeur d’impulsion (MLI ou PWM), est une technique pour obtenir des effets d’allure analogique avec des broches numériques. Le contrôle numérique est utilisé pour créer une onde carrée, un signal basculant entre un niveau HAUT et BAS, 0V et 5V) . avec les lignes de 0 à 13.
Bus série normalisé SPI
– 4 entrées/ sorties pour le bus série normalise SPI ( SS -> 53 / MOSI ->51 / MISO -> 50 / SCK -> 52 ) .
Définition du bus SPI : L’interface Série pour périphériques (SPI) est un protocole de communication série synchrone utilisé par les microcontrôleurs pour communiquer avec un ou plusieurs composants périphériques rapidement sur de courtes distances. Ce protocole peut aussi être utilisé pour des communications entre deux microcontrôleurs.
A savoir : Pour inclure la librairie SPI dans un programme, on ajoutera au début du programme la ligne suivante : #include <SPI.h>
Entrée – sortie pour interface série I2C
– 2 entrées/ sorties d’interface série I2C reparties comme suit SDA -> 20 ,SCL ->21
Définition du bus I2C : est un bus de données qui a émergé de la « guerre des standards » lancée par les acteurs du monde électronique. Conçu par Philips pour les applications de domotique et d’électronique domestique, il permet de relier facilement un microprocesseur et différents circuits, notamment ceux d’une télévision moderne
A savoir : Pour inclure la librairie Wire dans un programme, on ajoutera au début du programme la ligne suivante : #include <Wire.h>
| Retour au sommaire . |
Entrées analogiques
La carte dispose pour cela de 16 entrées , repérées de A0 à A15 , qui peuvent admettre toute tension analogique comprise entre 0 et 5 V. Mais attention la tension ne doit jamais dépasser 5 Volts sous peine de détruire le microcontrôleur. Pour mesurer des tensions supérieures a 5 Volts il faut équiper l’entrée d’un pont diviseur . Pour mesurer des tensions analogiques les cartes Arduino contiennent un convertisseur analogique-numérique (A/N). Ce convertisseur a une résolution de 10 bits, renvoyant des résultats de mesure sous forme d’entiers de 0 à 1023.
Rappel :Un signal analogique peut prendre une multitude de valeurs. Dans notre cas, par exemple, la grandeur analogique pourra varier aisément de 0 à 5V en passant par 0.75V, 3.89V.En revanche on peut mesurer des tensions plus élevées par un diviseur de tension pour élargir la plage de mesure ( les mesures de tensions supérieures à 50 Volts exige l’utilisation d’appareils conçus selon les normes de sécurité à ce domaine de tension )
A savoir : Pour mesurer une source de tension externe ,c’est la référence de la tension interne que nous utiliserons .Pour la mettre en service ,nous passons le paramètre INTERNAL à la fonction analogReference (INTERNAL )
- DEFAULT : La référence de 5V par défaut ( pour Arduino Mega )
- INTERNAL1V1 : Comme ci-dessus mais pour la Arduino Mega
- INTERNAL2V56 : Une référence de 2.56V (uniquement pour le Mega)
- EXTERNAL : La référence sera celle appliquée sur la broche ARef
L’instruction analogRead() ne fonctionnera pas correctement si la broche analogique utilisée pour la mesure a été mise en sortie, et donc dans ce cas, la reconfigurer en entrée avant d’utiliser l’instruction analogRead.
| Retour au sommaire . |
Pinmode arduino 2560
Pinmode arduino 2560
| Retour au sommaire . |
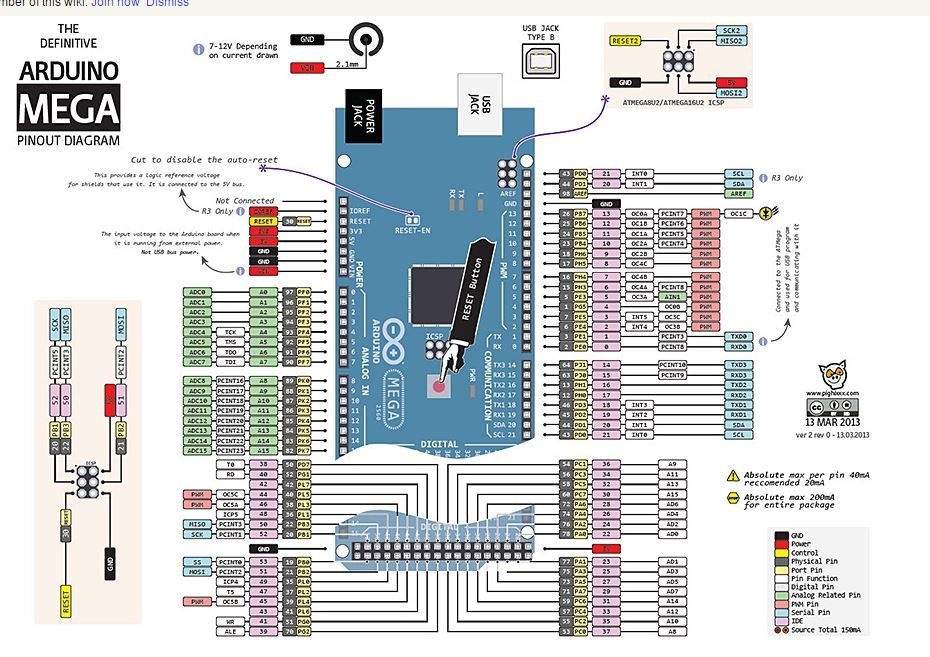
Brochage de la carte Arduino 2560 |
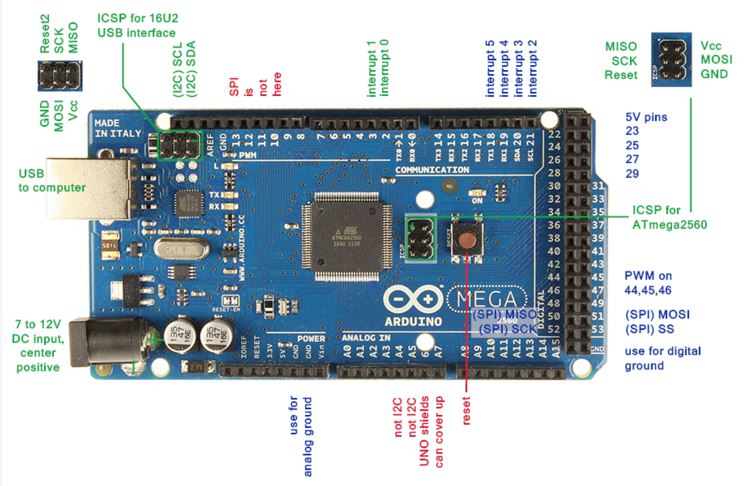
| Retour au sommaire . |
Exemple de raccordement sur les différentes entrées |
Rappel : Sur la carte Arduino Mega un niveau haut est considéré comme bon lorsque la tension est supérieure à 3 Volts et il est considéré comme bas quand celle-ci est inférieure à 1.5 Volts. Toutes les valeurs comprises entre 1.5 Volts et 3 volts ne sont pas considérés comme de bonnes valeurs, ce qui peut affecter le bon fonctionnement de votre programme.
Interrupteur avec résistance de rappel
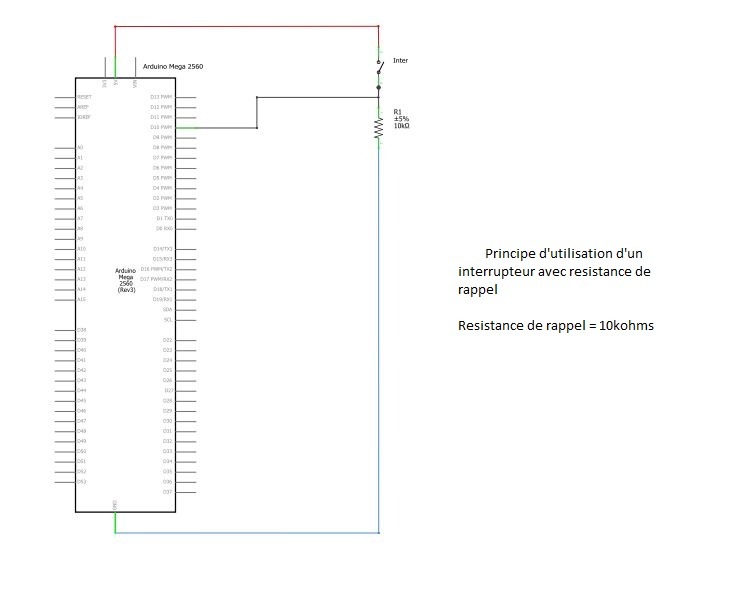
Résistance de rappel : cliquez sur l’image pour l’agrandir
Le montage ci-dessus permet de régler le problème de lecture aléatoire .Lorsque le circuit est ouvert ,la résistance permet de figer la valeur qui est vue par le microcontrôleur , dans ce cas un niveau bas est présent lorsque l’interrupteur est ouvert
| Retour au sommaire . |
Interrupteur avec résistance de tirage
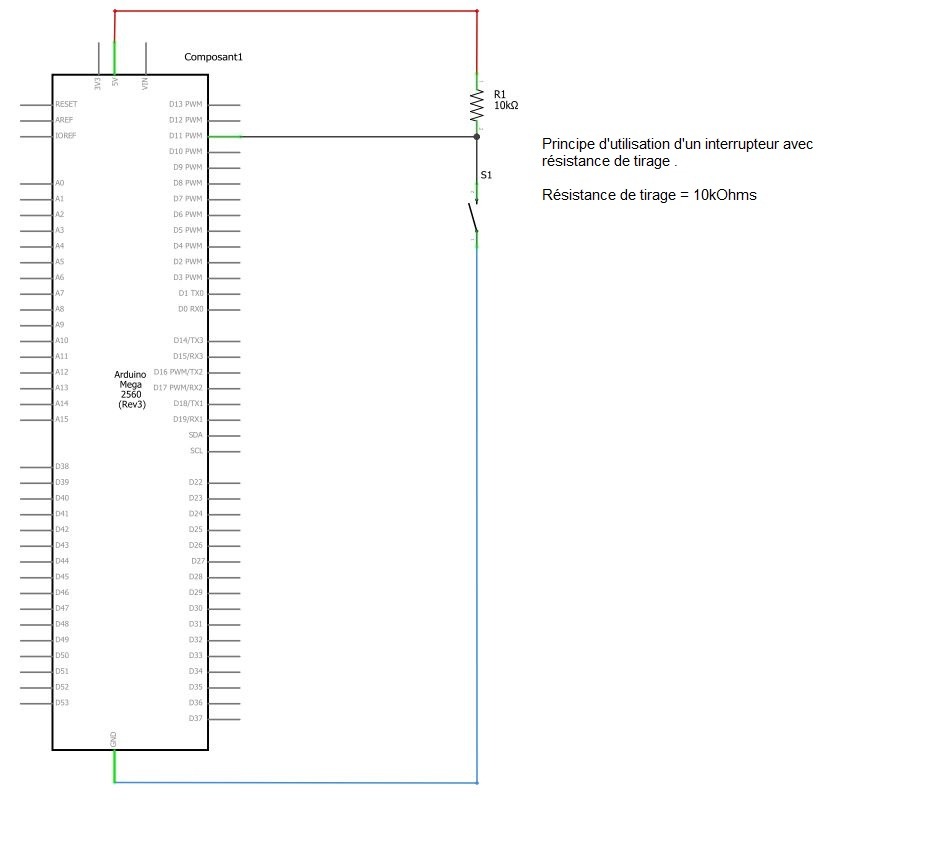
Résistance de tirage : Cliquez sur l’image pour l’agrandir
Le montage ci-dessus permet de régler le problème de lecture aléatoire .Lorsque le circuit est ouvert ,la résistance permet de figer la valeur qui est vue par le microcontrôleur , dans ce cas un niveau haut est présent lorsque l’interrupteur est ouvert

Différents type d’interrupteurs
| Retour au sommaire . |
Exemple de montage avec un sélecteur 2 positions avec résistance de rappel
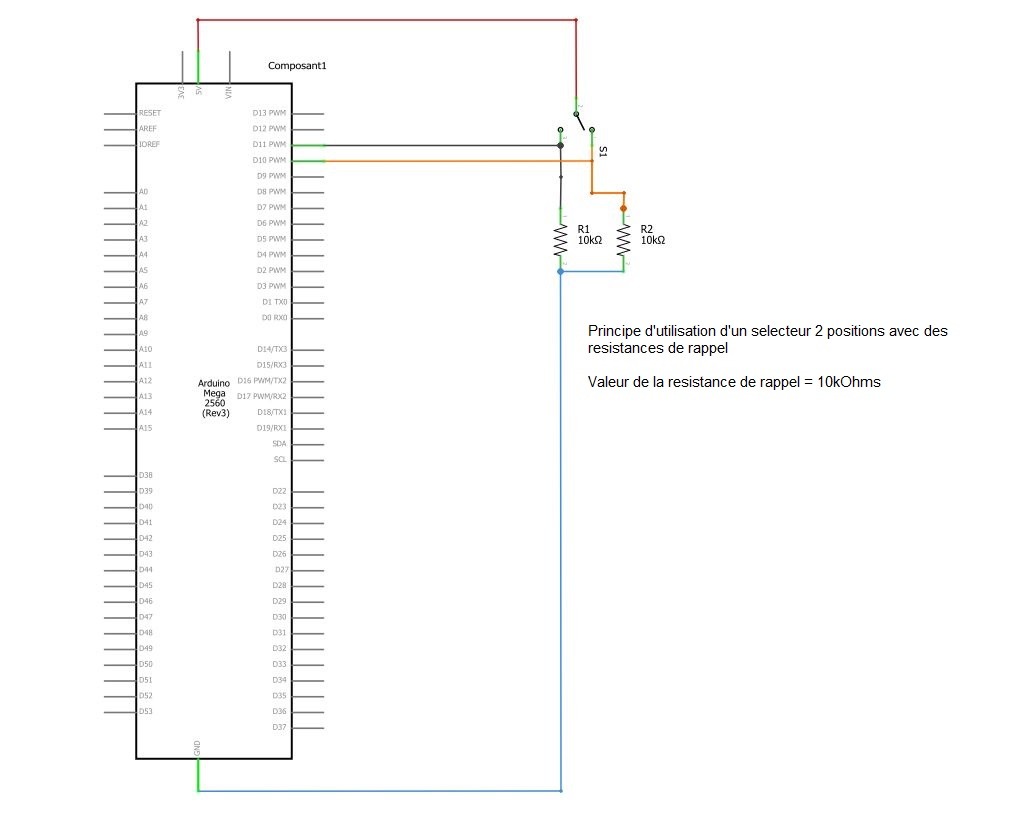
Sélecteur 2 positions avec résistance de rappel
Comment déclarer des entrées sorties
Ce premier programme vous initie à l’utilisation des entrées tout ou rien sur la carte Arduino . Comment déclarer un bouton poussoir , un relais et comment les utiliser.
Voici un tutoriel vidéo expliquant le principe de la déclaration des entrées sortie
| Retour au sommaire . |
Exemple de montage d’un potentiomètre sur une entrée analogique
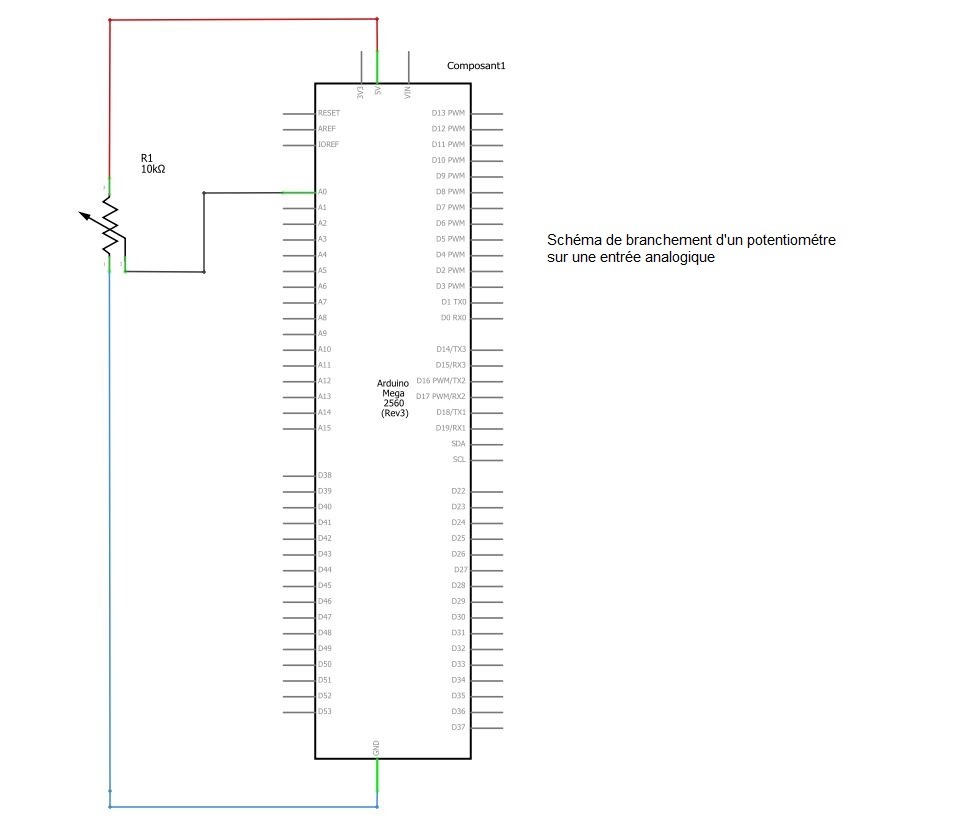
Exemple de montage avec un potentiomètre sur une entrée analogique
–
| Retour au sommaire . |
Exemple de programme pour déclarer des entrées sorties numériques |
| Retour au sommaire . |
Les cartes d’interfaces pour Arduino Mega |
Présentation d’une carte d’interface
Idéalement conçue pour le prototypage rapide, l’apprentissage et l’évaluation sans opération de soudure, c’est cartes sont destinées à venir s’enficher sur un module Arduino™ Mega 2560 ou ADK ou compatible.
–
Carte d’interface DFR0144 de chez DFRobot

Module dfr0144 . Cliquez sur la photo pour plus d’informations
Alimentation à prévoir: 7 à 12 Vcc via Arduino
Relais: 4 x 1 RT 3 A/230 Vac
T° de service: -30 à +85 °C
Dimensions: 95 x 64 x 30 mm
Version: V2.0
Référence fabricant: DFR0144
| Retour au sommaire . |
Carte d’interface Grove Mega Shield V1.2 103020027
Le module Grove Mega Shield de Seeedstudio est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino Mega. Il est compatible notamment avec les cartes Arduino Mega
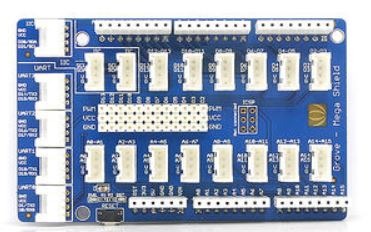
Shield E/S module Grove Mega Shield V1.2 103020027 pour Arduino Mega
Version: V1.2
Led: indicateur de reset
Reste: via bouton-poussoir
Connecteurs: 22 x 4 broches
Dimensions: 93 x 57 x 20 mm
Référence fabricant: 103020027 (remplace 101020024 et SLD90147P)
| Retour au sommaire . |
–
Shield E/S pour Arduino Mega Sensor Shield TinkerKit
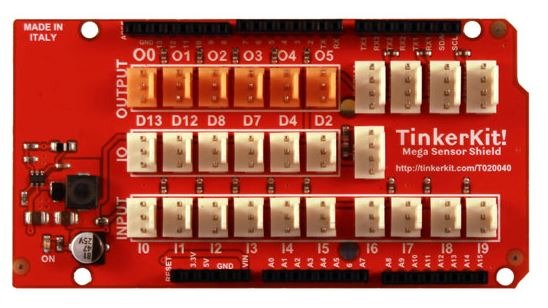
Shield E/S pour Arduino Mega 2560 Sensor Shield TinkerKit
Le module Mega Sensor Shield V2 permet de raccorder facilement et sans soudure les capteurs et les actionneurs de TinkerKit sur une carte Arduino Mega, Mega 2560 ou Mega ADK.
Il est équipé de 22 connecteurs 3 broches. Les 10 connecteurs I0 à I9 correspondent à des entrées analogiques. Les connecteurs O0 à O5 correspondent à des sorties analogiques permettant notamment le PWM (il est possible de les changer en entrées digitales). Les connecteurs IO (D2, D4, D7, D8, D12 et D13) correspondent à des entrées/sorties acceptant le PWM et les fonction digitalRead et digitalWrite.
Description de la Mega Sensor Shield TinkerKit :
Led verte: alimentation
Reset: via bouton-poussoir
Connecteur 4 broches TWI: bus I2C
Connecteur 4 broches série: port série
Dimensions: 102 x 53 mm
Prix moyen : De 23 à 29 €
Ou trouver le module Mega Sensor Shield TinkerKit : Gotronic ,Lextronic , RS Composant
| Retour au sommaire . |