
Principe de fonctionnement et objectif
du 19/02/2015
Rappel
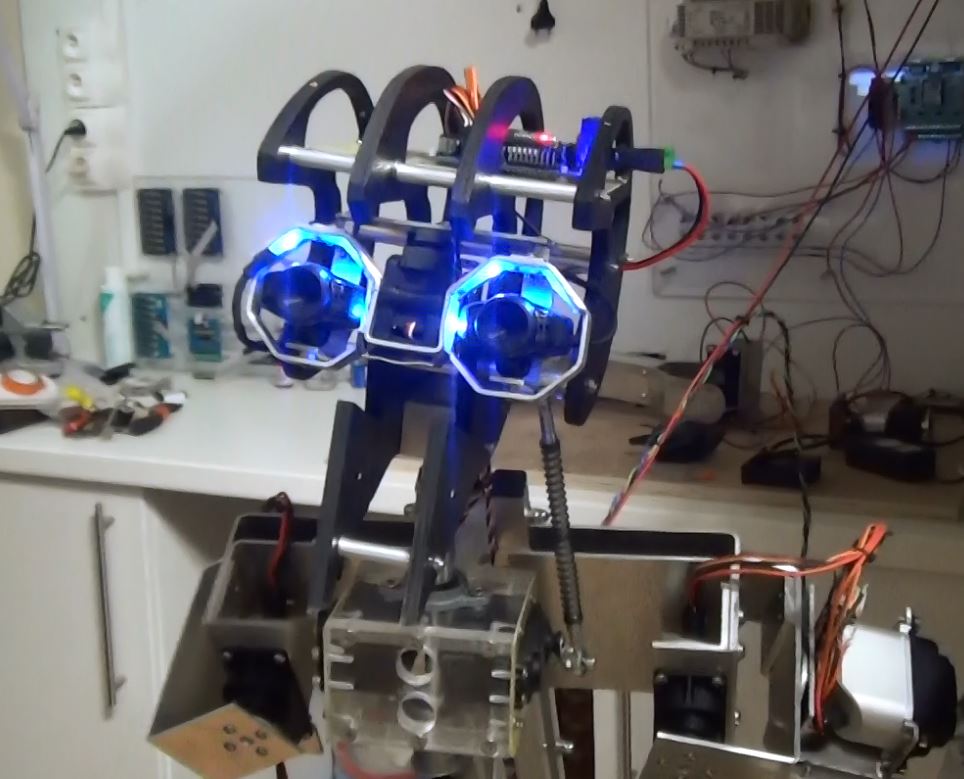
Le projet Sentinel a pour objectif de créer un robot semi humanoïde complet, disponible et reproductible par tous.
Il faut savoir que cette rubrique n’est pas figé, vérifier régulièrement si des principes, des modifications techniques , ou de nouveaux programmes ont vu le jour. La date de remise à jour de l’article sera toujours en tête de page .
La construction est prévue en 2 matières, en aluminium pour les féru de mécanique, en PLA ou en ABS pour les passionnés d’impression 3D, ou un mix des 2. Il est aussi prévu une version bois contreplaqué. Il faut rappeler que le prototype était en contreplaqué peint en noir. Il sera donc possible de télécharger les plans mécaniques comme les fichiers STL pour l’impression. La partie capteur sera choisie pour ses performances et le prix, à vous de rechercher le fournisseur le moins cher à référence égale, évidement on essayera de proposer plusieurs types de capteurs pour le même type d’information. Le système informatique se présentera sous la forme d’une carte mini ITX ou d’une carte microcontrôleur. Dans les 2 cas, une solution sera proposée. La partie traitement du système central sera proposée en version programmation par le biais de bloc logique (type Profilab) ou en C++.
Enfin rappelons que comme ce système est reproductible par tous, c’est pour cela que chacun peut contribuer à améliorer ses performances .
- Du choix des capteurs
- Des modifications éventuelles de la mécanique
- La modification de son look etc. ….
- Signaler aussi tous les liens qui ne fonctionnent pas ( d’ailleurs c’est valable pour tout le site )
Pour cela, il suffit d’adresser un message sur FaceBook
Condition sur le principe de fonctionnement du Robot Sentinel
- Pouvoir autant que possible connaitre les informations sur son environnement afin d’échanger des informations de ressenti comme les êtres humains.
- Répondre à 400 questions différentes (ce seuil a été défini en fonction de l’état de nos recherches sur le sujet).
- Il ne devra jamais formuler 2 fois le même type de réponse dans un temps donné (aléatoire avec butée de seuil).
- Pouvoir suivre du regard son interlocuteur, reconnaitre les visages de ses proches.
- Avoir une personnalité comme des mimiques ( Geste ou expression visuelle ) qui exprime une pensée) comme les êtres humains.
- Il possèdera quelques reflexes afin de respecter son intégrité mécanique et électronique .
- En cours
- Il se déplacera sur un châssis 2 ou 4 roues motrices et devra posséder un système de coupure d’urgence
Rentrons maintenant dans les détails plus techniques de chaque sujet.
[———————————————————————————————————————————]
Détail de la rubrique 1
Pouvoir autant que possible connaitre les informations sur son environnement afin d’échanger des informations de ressenti comme les êtres humains.
Il doit pouvoir donner des informations sur son environnement aussi basique comme la température, la lumière, le bruit qui sont des informations que des êtres humains sont capables de ressentir, mais Sentinel se devra d’être plus précis comme :
« Il fait froid. D’ailleurs la température est de 8 degrés »

Cette prise d’information peut être récupérée via un capteur de type SEN23292P. Plage de mesure: -40 à +125 °C pour une précision de 1,5 degrés. Ce capteur qui se trouvera dans sa boite crânienne elle-même connectée directement sur les interfaces de contrôle de l’unité centrale.
Pour la détection de lumière, il doit faire la différence entre la nuit et le jour avec des seuils. Il doit posséder des notions de niveau de clarté de lumière comme pour les êtres humains.
- il fait sombre
- c’est ensoleillé
Si le détecteur donne l’information: « il fait noir », Sentinel mettra en route ses projecteurs de châssis automatiquement. Ces informations seront récupérées par le biais des caméras et/ou du détecteur SEN10171P. De plus, ce capteur nous permet de choisir entres 3 spectres de détection: spectre infrarouge, spectre visible pour l’homme ou spectre complet.

Détecteur de lumière .SEN10171
Pour l’ambiance sonore, nous allons confier cette tâche au capteur SEN02281P
[———————————————————————————————————————————]
Détail de la rubrique 2
Répondre à 400 questions différentes
Pour le moment, nous avons 2 choix soit « suivant vos budgets et vos impératifs :
Module de reconnaissance vocale « EasyVR ». Par le jeu de la programmation, on peut passer à un plus grand nombre d’ordre reçu, nous verrons cela en détail.
Information du constructeur : Ce petit module vous permettra d’ajouter la possibilité à votre microcontrôleur de pouvoir réagir à des ordres vocaux. Doté d’une liaison série, ce dernier est capable de reconnaître jusqu’à 32 mots ou expressions (qu’il vous faudra préalablement lui apprendre).
Source technique du module « EasyVR » : Lextronic
La version EasyVR Arduino Shield 2.0

Carte de commande vocale « EasyVR »
Prend en charge jusqu’à 32 déclencheurs dépendants haut-parleur (SD) ou commandes (n’importe quelle langue) défini par l’utilisateur.
Prend en charge les mots de passe vocaux pour la reconnaissance vocale biométrique.
3 lignes x GPIO peuvent être contrôlées par les nouvelles commandes de protocole.
- Sortie audio PWM impédance 8 ohms.
- Prise casque.
- LED programmable.
- Fonction de lecture sonore.
- Module peut être utilisé avec n’ importe quel hôte avec une interface UART (alimenté en 3.3V – 5V).
Le logiciel EasyVR Commander a été créé par Veear pour programmer la carte EasyVR d’une façon très simple. Ce logiciel se télécharge sur le site VeeaR et vous pouvez l’installer sur votre PC aussitôt.
Attention : N’oubliez pas de connecter le micro fourni avec la carte et placer le cavalier sur J12. La position sur j12 vous autorise à programmer via votre PC le module de reconnaissance vocale.
Une fois le programme installé, lancez le logiciel et allez dans la barre d’outils afin de sélectionner le port série auquel est relié l’Arduino.
Ce qui est intéressant avec ce logiciel c’est qu’il va générer une partie du programme de l’Arduino .
Source technique du module « EasyVR ».
Module de reconnaissance vocale « SpeakUP »
Information du constructeur : le « SpeakUp » est un petit module « autonome de reconnaissance vocale « mono-locuteur ». Ce dernier peut être configuré pour reconnaitre jusqu’à 200 ordres vocaux parmi une bibliothèque que vous devrez lui apprendre. Le module (au format « ClickBoard ») est architecturé sur la base d’un puissant processeur STM32F415RG associé à un circuit intégré codec stéréo VS1053 ainsi qu’à un microphone et à 3 leds de visualisation. Ce dernier dispose de 12 sorties qui pourront être activées selon plusieurs combinaisons en fonction des ordres qui auront été reconnus.