
Présentation de nos différents chassis.
Châssis version HM-3.10
Propulsion du châssis 2 roues motrices indépendante
Kilomètre parcouru pour le châssis version HM-3.10-> 1km (bêton, herbe, gravier )
Charge utile 55 KG – Vitesse 4km/h
Prévus pour surfaces difficiles telles que l’herbe ou le gravier, ainsi que sur les surfaces rugueuses et inégales
Invalid Displayed Gallery
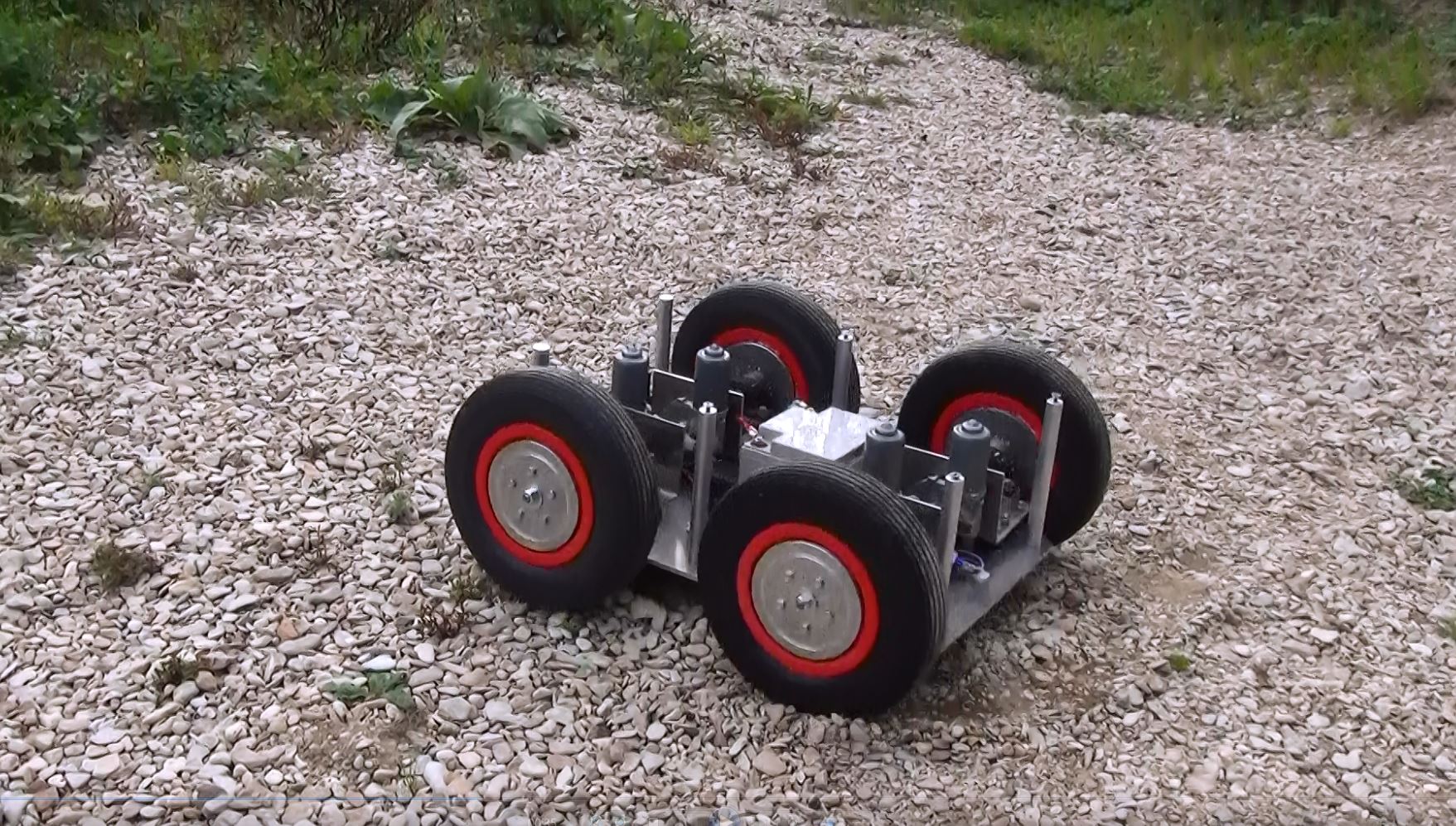
Projet châssis LL-1.01( Châssis polyvalent ) à suivre
Date de début de construction :01/06/2014
Propulsion du châssis 4 roues motrices indépendantes
Kilomètre parcouru pour le châssis version LL-1.10->400m (bêton, herbe, gravier )
Charge utile 70 KG – Vitesse 6km/h
Prévus pour surfaces difficiles telles que l’herbe ou le gravier, ainsi que sur les surfaces rugueuses et inégales
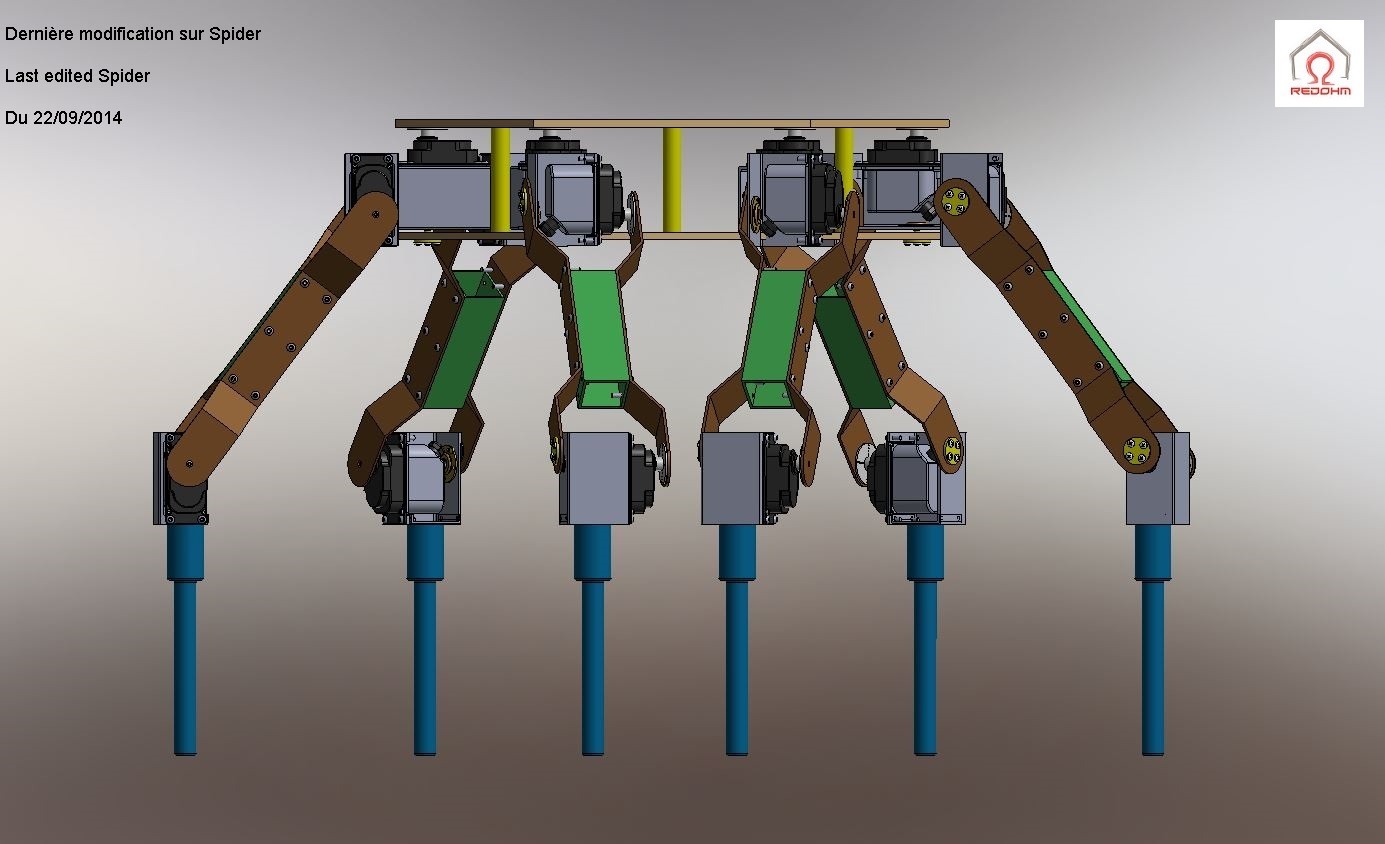
Projet châssis Spider 1.01 ( Châssis polyvalent ) à suivre
Date de début de construction :13/09/2014
Le projet Spider a pour objectif la création d’un châssis animé par 6 pattes de 0.70m à 0.80m de hauteur pour une largeur de 0.70m.Les caractéristiques recherchées sont :
• Vitesse 4 à 5 km/h
• Charge embarquée entre 5 à 10kg (caméra infrarouge, télémètre laser)
• Autonomie de 1 heure.
Il est prévu pour les terrains accidentés. Les applications seront la résultante des qualités du châssis et de son informatique de mouvement
Projet châssis LH-1.00( Châssis polyvalent ) à suivre
Date de début de construction :01/04/2015
Propulsion du châssis 6 roues motrices indépendantes
Montage des caissons de propulsion en chenille
Kilomètre parcouru pour le châssis version LH-1.10-> …………………………….
Charge utile 75 KG – Vitesse 7km/h
Prévus pour surfaces difficiles telles que l’herbe ou le gravier, ainsi que sur les surfaces rugueuses et inégales
Projet châssis CC-1.01( Châssis polyvalent ) à suivre
Date de début de construction :01/01/2016
Propulsion du châssis 2 roues motrices
2 roues directrices
Charge utile 30 KG – Vitesse 10km/h