
Le projet Spider a pour objectif la création d’un châssis animé par 6 pattes de 0.70m à 0.80m de hauteur pour une largeur de 0.70m.
Mise à jour le 10/11/2014
(Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
(Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
Démarrage du projet le 13/09/2014
Les caractéristiques recherchées sont :
• Vitesse 4 à 5 km/h
• Charge embarquée entre 5 à 10kg (caméra infrarouge, télémètre laser)
• Autonomie de 1 heure.
• 2 modes de pilotage du châssis
1. Radio commande par immersion
2. Autonome (GPS, télémètre, capteur ultrason le seul mode retenu et le mode patrouille pour le moment)
Il est prévu pour les terrains accidentés. Les applications seront la résultante des qualités du châssis et de son informatique de mouvement
Etude de Spider

Responsable du projet Spider : Louis
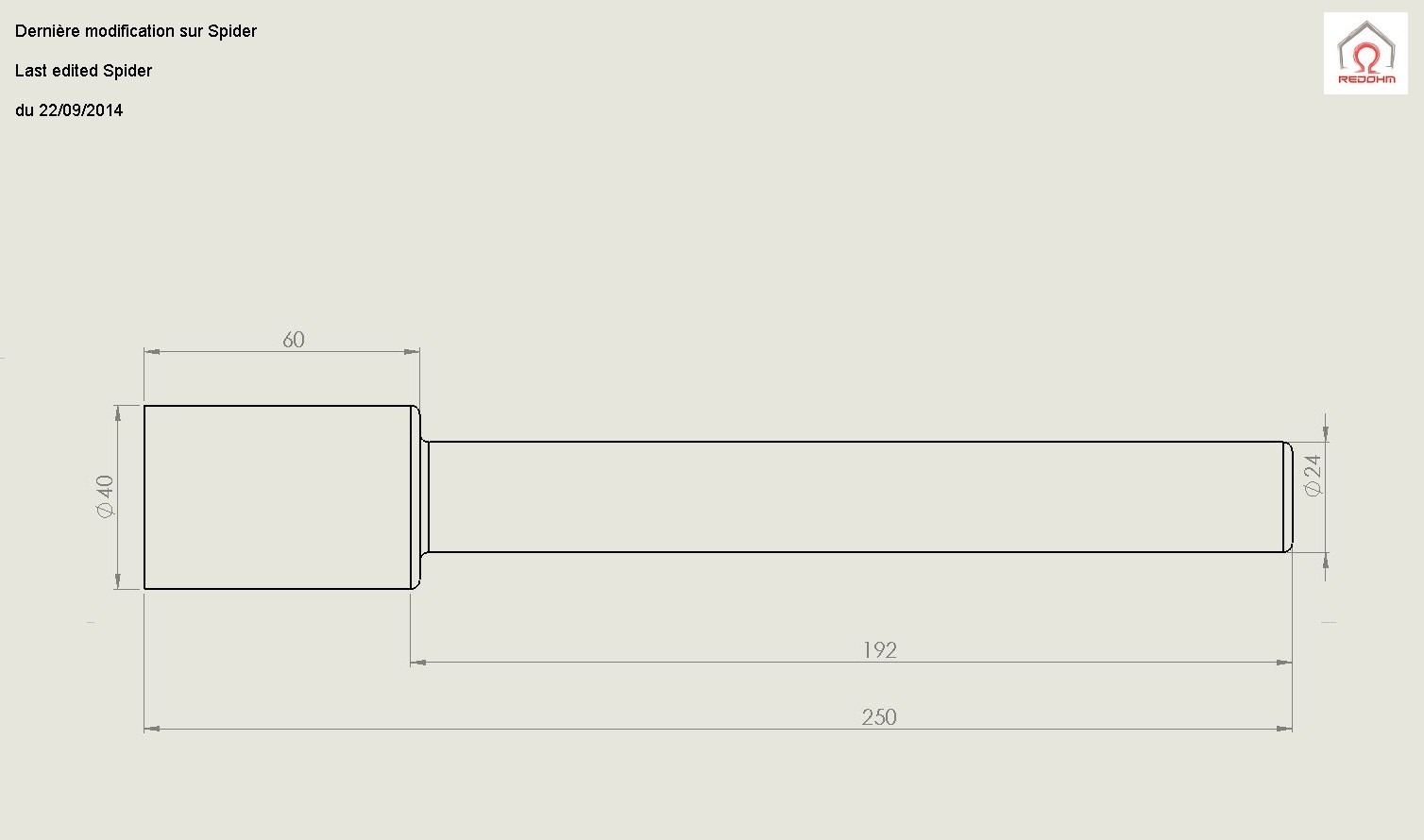
Embout de la patte de Spider ( en aluminium )
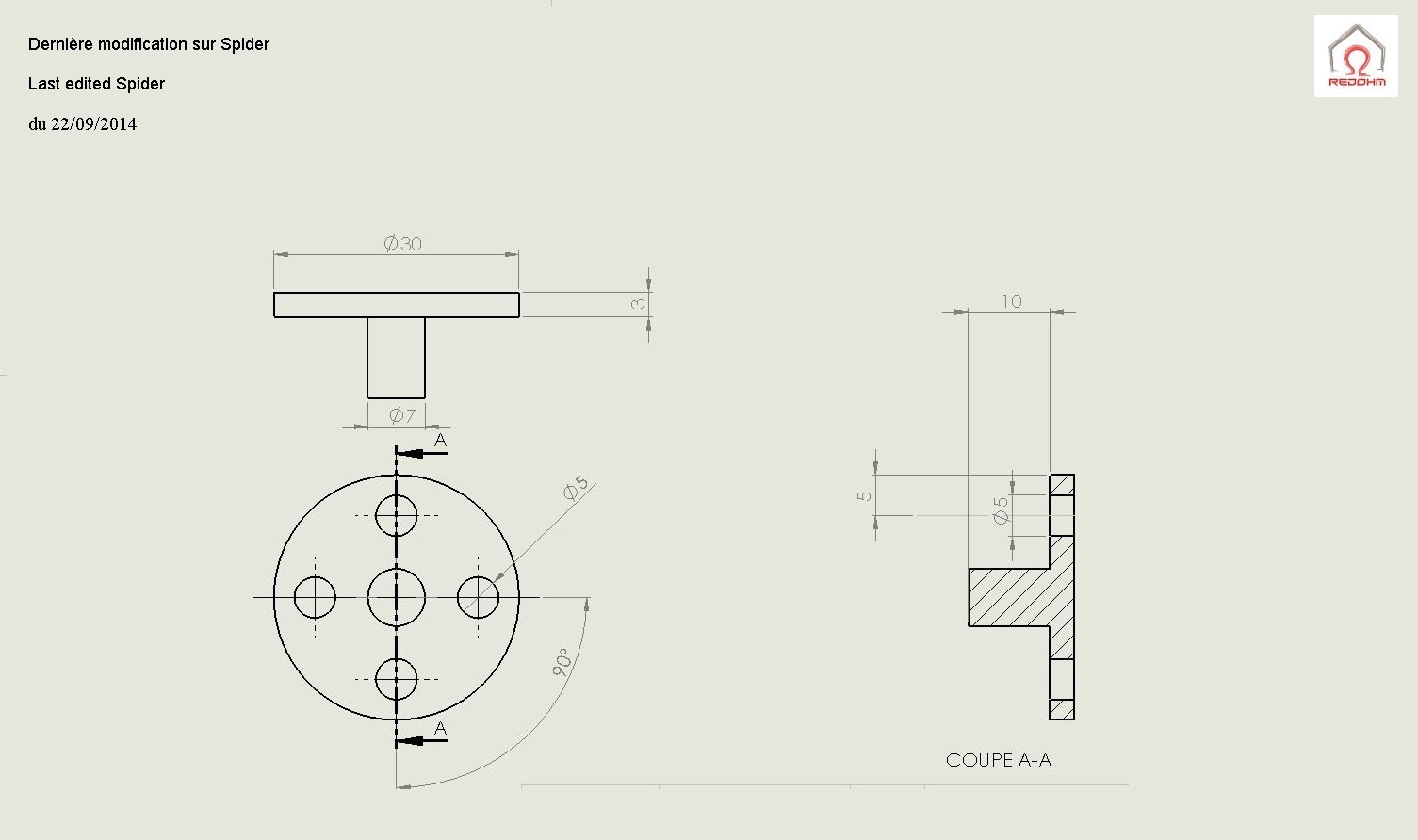
Support roulement ( en acier )
(Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
(Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
RedOhm fabrique ces pièces, tournage, fraisage, perçage, pliage, impression 3d etc ….

Tournage des axes

Fraisage

Pliage des pattes
Pour la partie mécanique : Loic,Christophe

Ensemble des pièces pour une patte (Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
Caractéristiques techniques des servomoteurs de pattes soit 18 piéces:
Ou le trouver : France Robotique

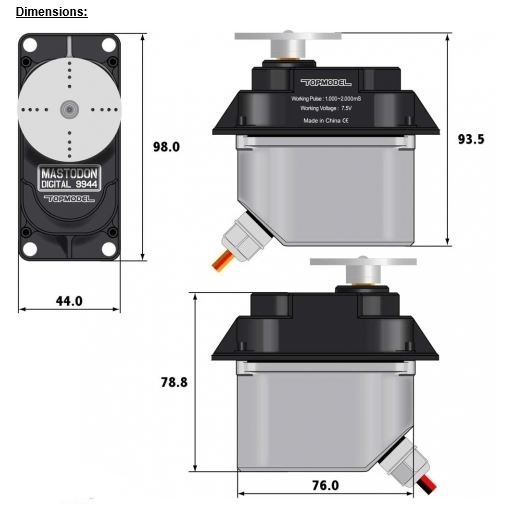
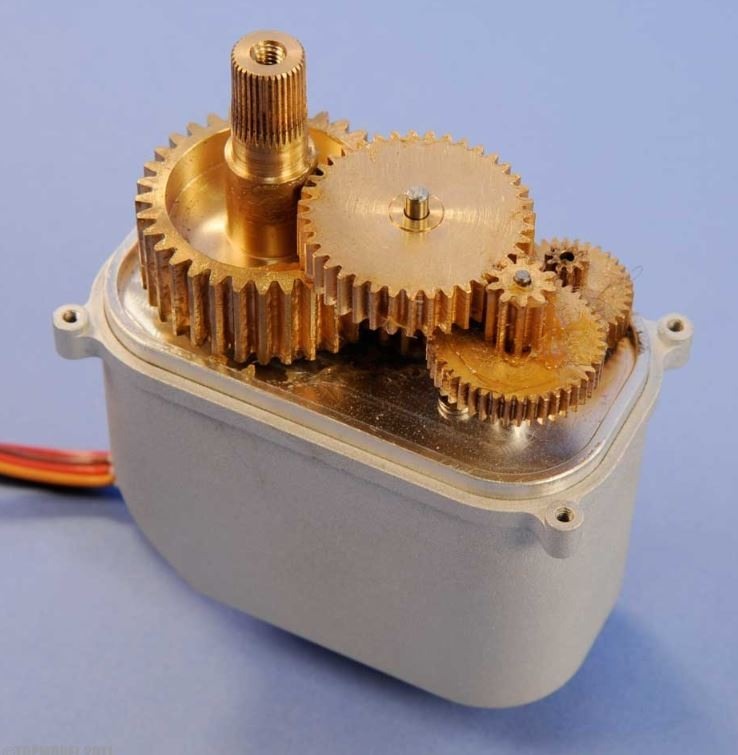
Couple: 99kg*cm (7.4V)
Vitesse: 0,57″/60° (7.4V)
Vitesse: 0,38″/40° (7.4V)
Poids: 430g env.
Dimensions (Lxlxh): 76x44x78,8mm env.
Roulement: 2
Pignons: métal
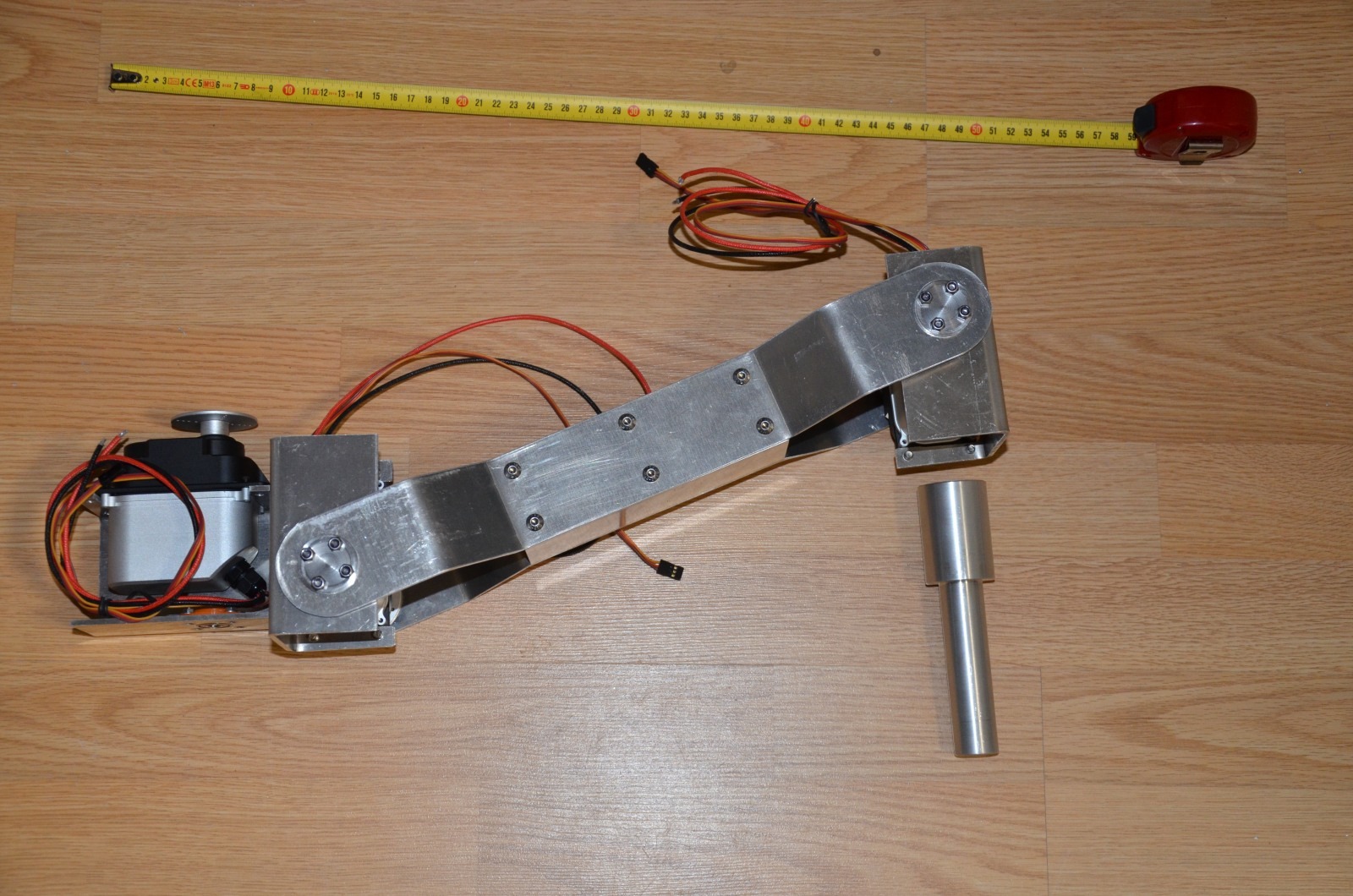
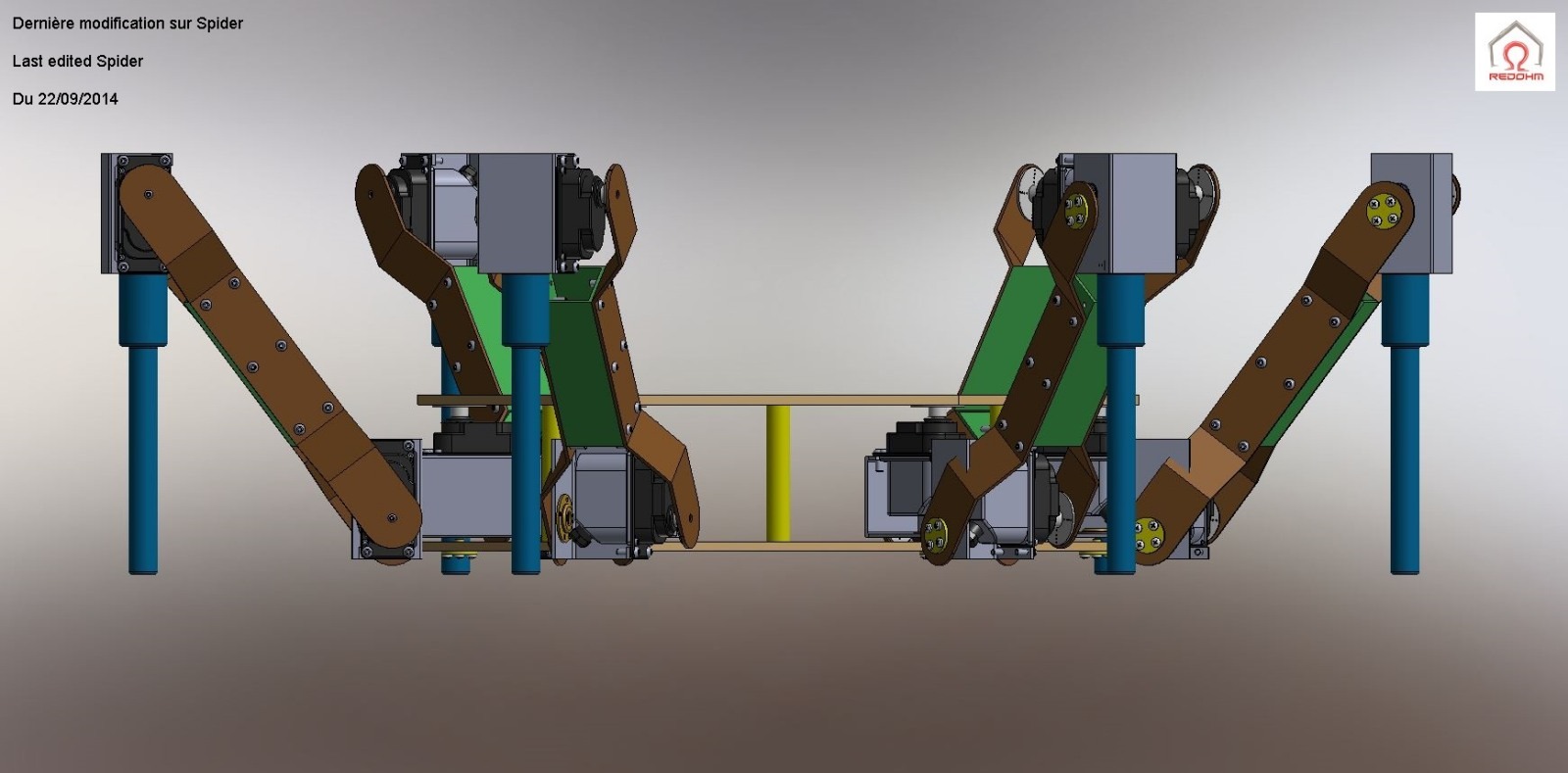
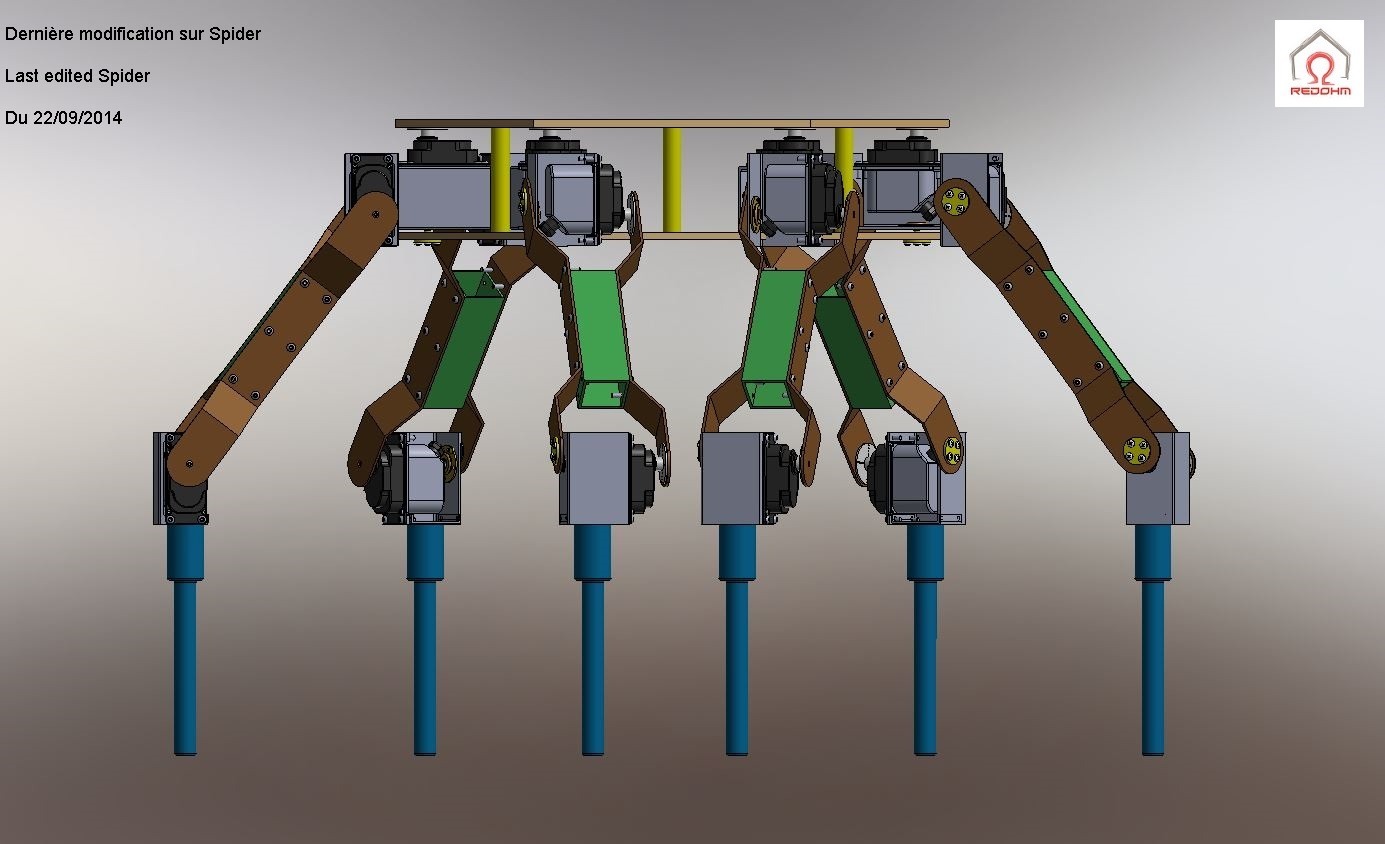
Vue d’une partie de la patte de Spider (il y a 6 pattes) (Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)

Vue d’une partie de la patte de Spider (il y a 6 pattes ) (Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)

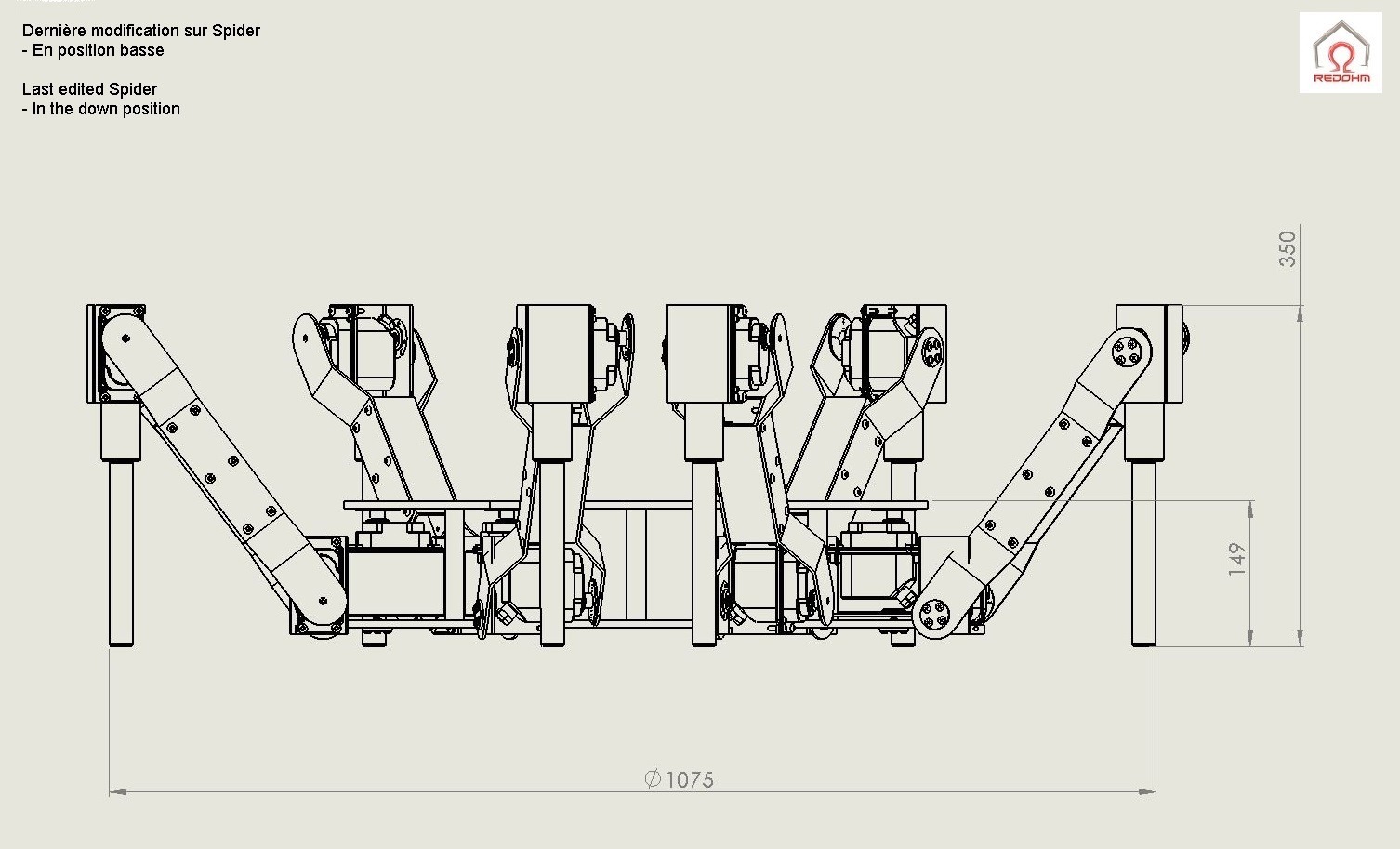
– Montage du châssis avec la première patte de Spider (Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944) – Mounting frame with the first leg of Spider

(Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)

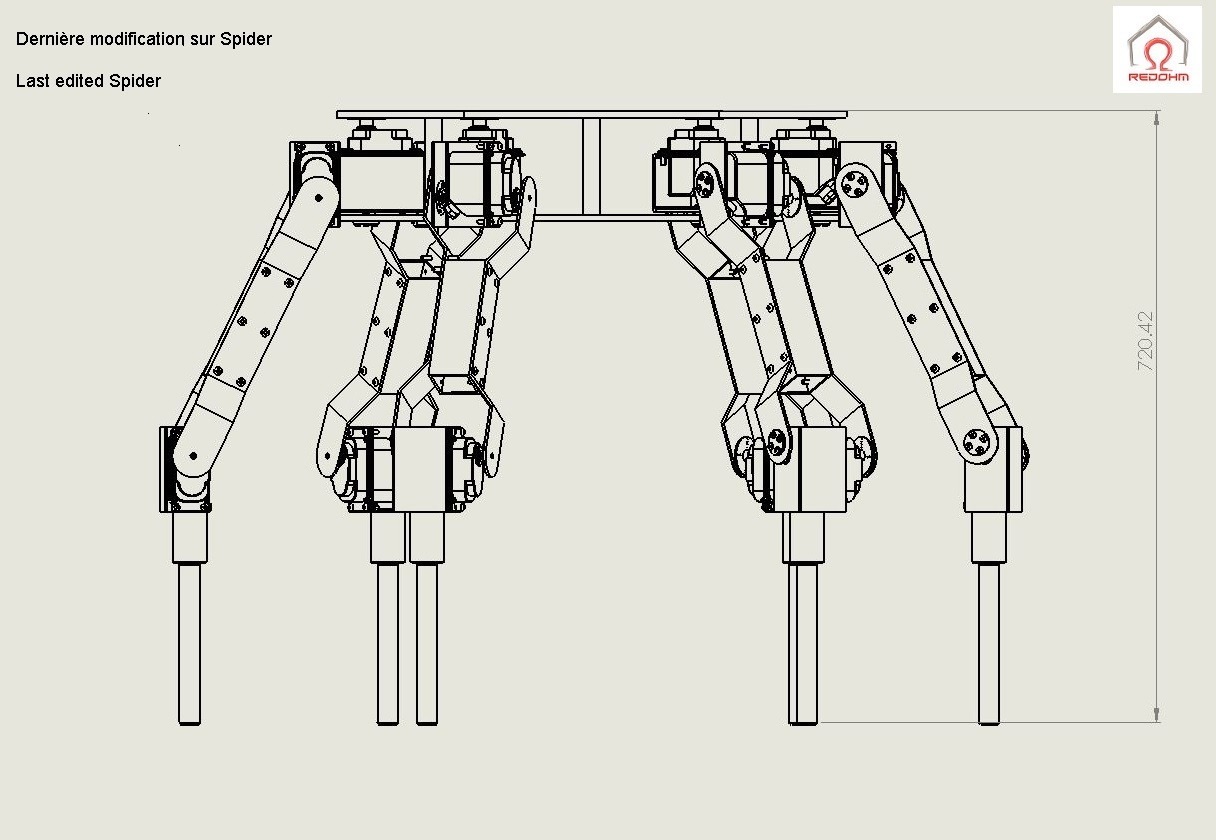
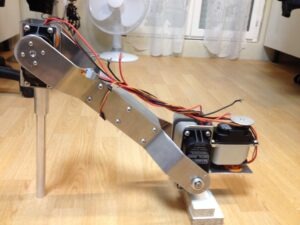
Patte de Spider tendue (Version 1.01 avec 3 servomoteurs identiques du type MASTODON 9944)
Après les essais sur la version 1.01 nous nous sommes aperçus que le moteur au centre de la patte manquée de puissance, c’est pour cela que nous avons modifié l’ensemble de la patte.
- En premier lieu gagner du poids, donc allègement de la partie inferieure
- Changement du moteur central par un servomoteur TopModel type :MAMMOTH 38055 . Il développe un couple de poussé de près de 400kg par cm , contre de 99kg par cm auparavant
Voici le montage du nouveau servomoteur début de la Version 2.01

Voici le montage du nouveau servomoteur début de la Version 2.01
